Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
20220910SSDM
Search
Sponsored
·
Ship Features Fearlessly
Turn features on and off without deploys. Used by thousands of Ruby developers.
→
株式会社レヴィ
September 14, 2022
Technology
1.1k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
20220910SSDM
株式会社レヴィ
September 14, 2022
More Decks by 株式会社レヴィ
See All by 株式会社レヴィ
sepm-training-sample
levii
0
69
20250904DandS
levii
0
99
SocSys37-Balus
levii
0
66
2024-06-25 ソフトウェア設計における思考と学び方を考える 〜増田さんの思考を構造的に見える化してみる〜
levii
4
1.2k
株式会社レヴィ会社紹介
levii
0
310
Sample-se-one-day-training
levii
0
1.5k
SocSys34-Balus
levii
0
180
20230323TechDLT-vol9
levii
0
530
levii-buzzword-2022
levii
0
510
Other Decks in Technology
See All in Technology
生成AI×AWS CDK×AWS FISで"振り返れる"ミニGameDayをつくろう
yoshimi0227
1
110
ZOZOTOWNの進化と信頼性を両立する負荷試験
zozotech
PRO
2
160
ruby.wasmとPicoRuby.wasmに対応した仮想DOMライブラリを作ってる話 #kaigieffect_kaigi
sue445
PRO
0
150
キャリアの中で本を作る / Making a Book During Your Career
ak1210
0
140
大量データに対しても、生成AIを用いてリーズナブルにデータ加工をしたい!Databricksのai_queryについて調べてみた
kamoshika
1
150
ローカルLLMとLINE Botの組み合わせ その3 / LINE DC Generative AI Meetup #8
you
PRO
0
130
クラウド上のデータ復旧で見落としがちな制約: 医療系 SaaS の BCP 設計から得た教訓
kakehashi
PRO
0
3.5k
Alphaモジュール使っていいのかい!?いけないのかい!?どっちなんだいっ!?
watany
1
150
Claude Code公式skillで 自分の仕事を少しずつ手放そう!(Claude Code開発ノウハウ大公開スペシャル by クラスメソッド)
kaym
1
350
AI、CDK と協働する Full TypeScript アプリケーション開発 / Full TypeScript Application with AI and CDK
geekplus_tech
1
130
SRE依存からの脱却 運用を開 発チームへ移す、 フルサイ クル開 発体制の実践
joooee0000
0
2.8k
型は壁、Rustでもバグを直すな、表現できなくせよ
nwiizo
13
2k
Featured
See All Featured
Building a Scalable Design System with Sketch
lauravandoore
463
34k
Dominate Local Search Results - an insider guide to GBP, reviews, and Local SEO
greggifford
PRO
0
210
Agile that works and the tools we love
rasmusluckow
331
22k
How to build a perfect <img>
jonoalderson
1
5.8k
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
Color Theory Basics | Prateek | Gurzu
gurzu
0
390
Automating Front-end Workflow
addyosmani
1370
210k
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
2
420
The Art of Programming - Codeland 2020
erikaheidi
57
14k
The browser strikes back
jonoalderson
0
1.4k
Easily Structure & Communicate Ideas using Wireframe
afnizarnur
194
17k
Public Speaking Without Barfing On Your Shoes - THAT 2023
reverentgeek
1
460
Transcript
システム設計と安全設計の視点を接続するための マトリクス型表記法「SSDM」の提案 竹内 芳樹(株式会社レヴィ顧問) 日本システムデザイン学会第3回研究発表大会 1 © 2022 YOSHIKI TAKEUCHI
概要 ➢背景 • 自動運転車、空飛ぶ車、ドローンなど、高度で複雑なシス テムによる便利な社会の実現を期待 • そのようなシステムの安全への関心や要求は高く、安全設 計は今後ますます重要 ➢課題 •
システムの複雑さが増すほど、目的と安全性を両立させる 設計解の探索はより困難 ➢解決手法の提案 • システムの安全に関わるアーキテクチャ設計を行う方法と してSSDM(System and Safety Design Matrix)という独自の 表記法を提案 2 © 2022 YOSHIKI TAKEUCHI
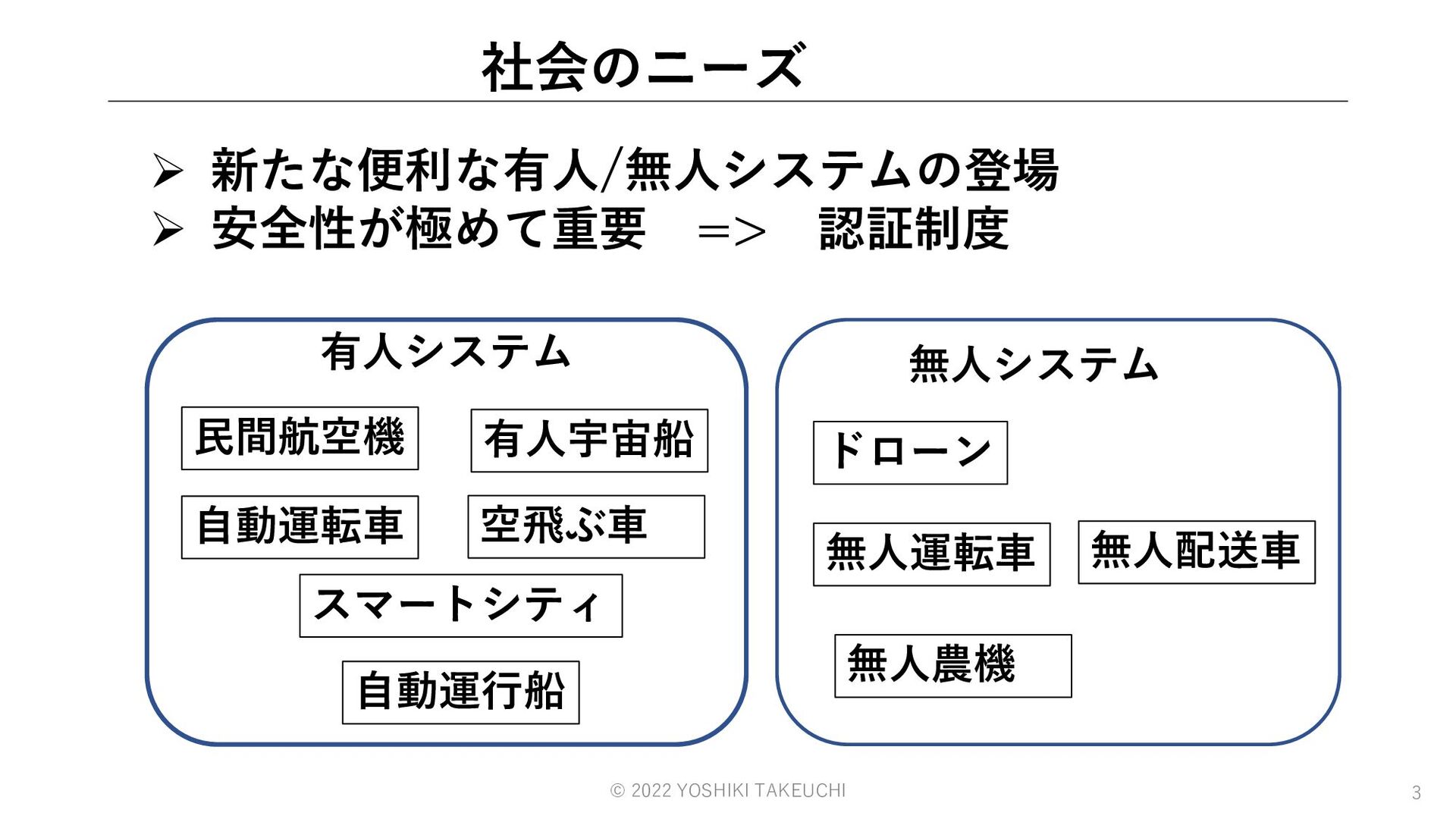
社会のニーズ 民間航空機 空飛ぶ車 有人宇宙船 自動運転車 無人運転車 自動運行船 無人農機 有人システム 無人システム
➢ 新たな便利な有人/無人システムの登場 ➢ 安全性が極めて重要 => 認証制度 ドローン スマートシティ 無人配送車 3 © 2022 YOSHIKI TAKEUCHI
メーカー 開発 設計 製造 審査・ 認証 機関 システム課題 1. 複雑なシステムの機能要求と安全性の同時実現
2. 開発するメーカのみならず、認可する審査機関にとって 安全性設計および検証結果の評価が難しい 3. アーキテクチャが重要だが見え難い 設計情報 機能検証結果 安全解析・検証結果 4 © 2022 YOSHIKI TAKEUCHI
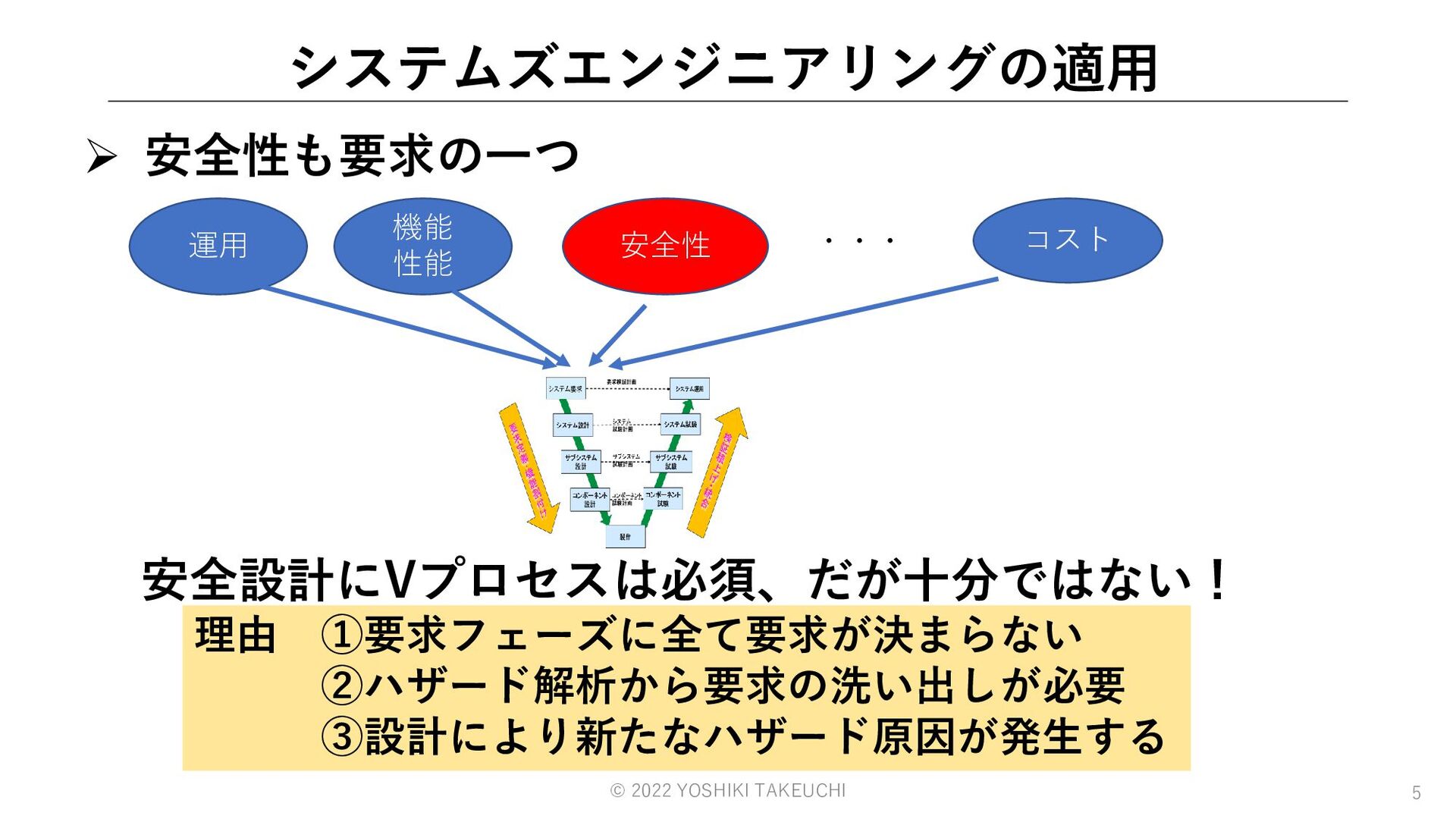
安全設計にVプロセスは必須、だが十分ではない! 運用 機能 性能 コスト 安全性 ・・・ システムズエンジニアリングの適用 ➢ 安全性も要求の一つ
理由 ①要求フェーズに全て要求が決まらない ②ハザード解析から要求の洗い出しが必要 ③設計により新たなハザード原因が発生する 5 © 2022 YOSHIKI TAKEUCHI
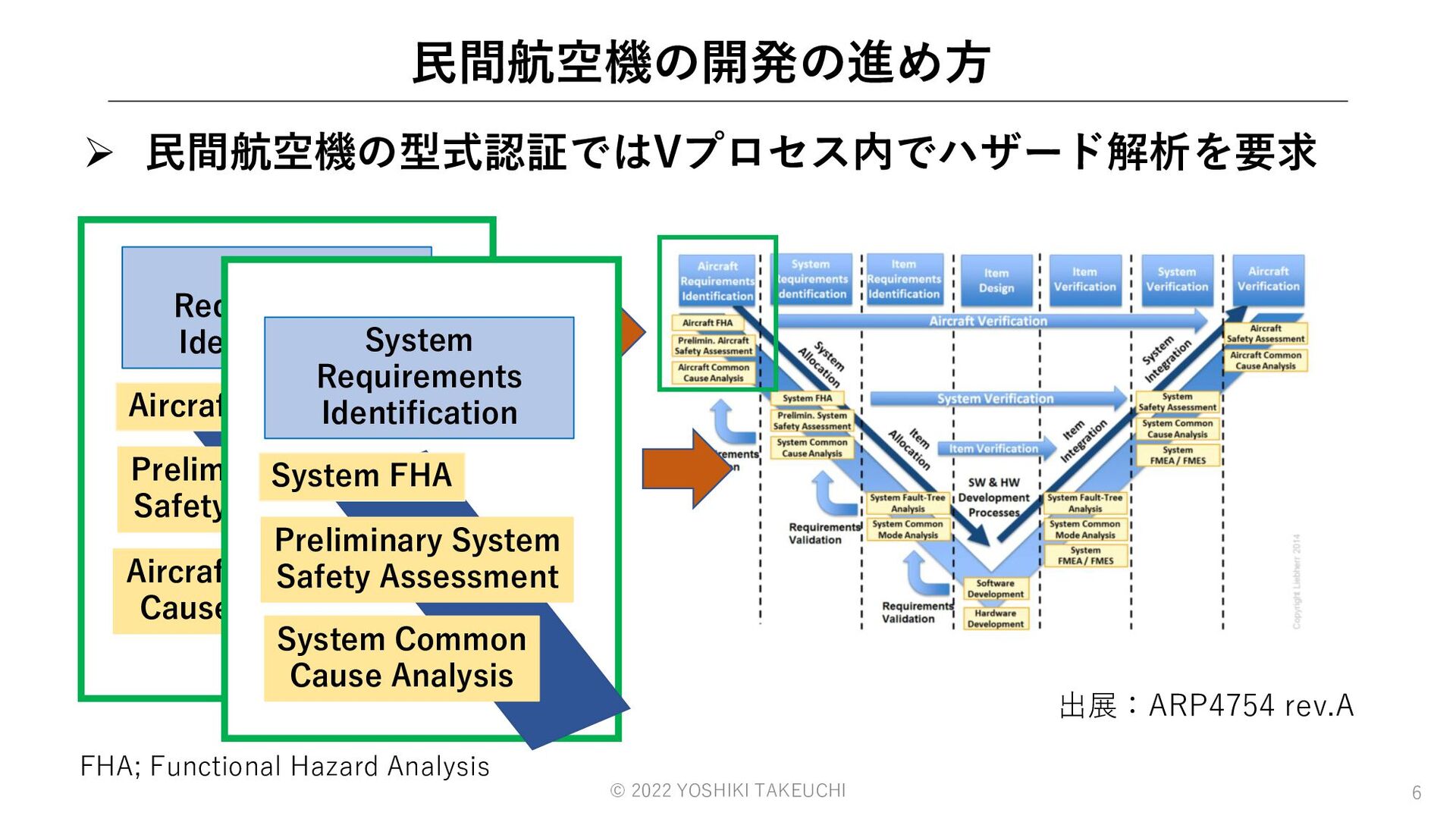
出展:ARP4754 rev.A 民間航空機の開発の進め方 ➢ 民間航空機の型式認証ではVプロセス内でハザード解析を要求 FHA; Functional Hazard Analysis Aircraft
FHA Preliminary Aircraft Safety Assessment Aircraft Common Cause Analysis Aircraft Requirements Identification System FHA Preliminary System Safety Assessment System Common Cause Analysis System Requirements Identification 6 © 2022 YOSHIKI TAKEUCHI
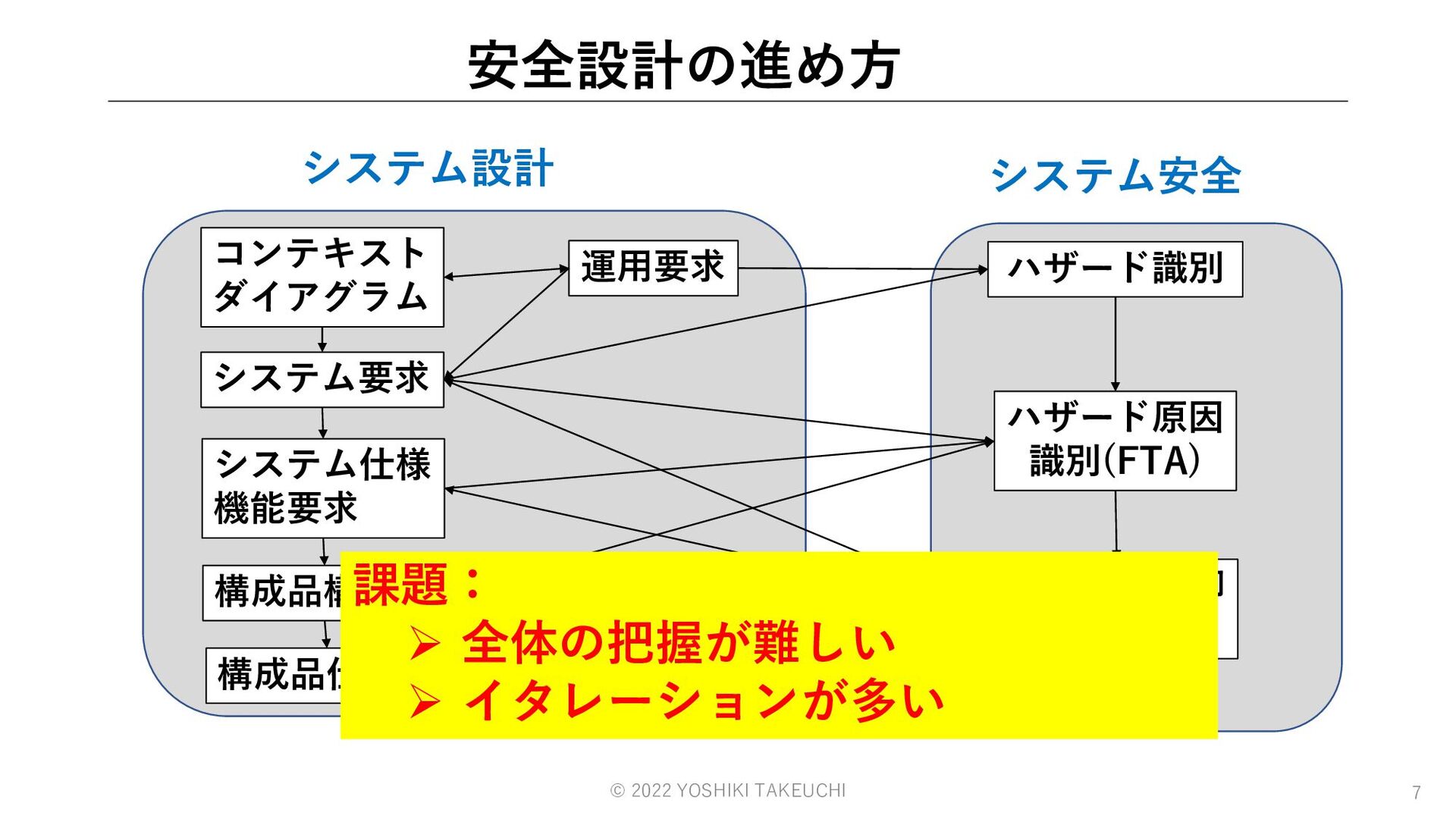
コンテキスト ダイアグラム システム要求 システム仕様 機能要求 構成品構成 運用要求 ハザード制御 方法設定 構成品仕様
ハザード識別 ハザード原因 識別(FTA) システム安全 システム設計 安全設計の進め方 課題: ➢ 全体の把握が難しい ➢ イタレーションが多い 7 © 2022 YOSHIKI TAKEUCHI
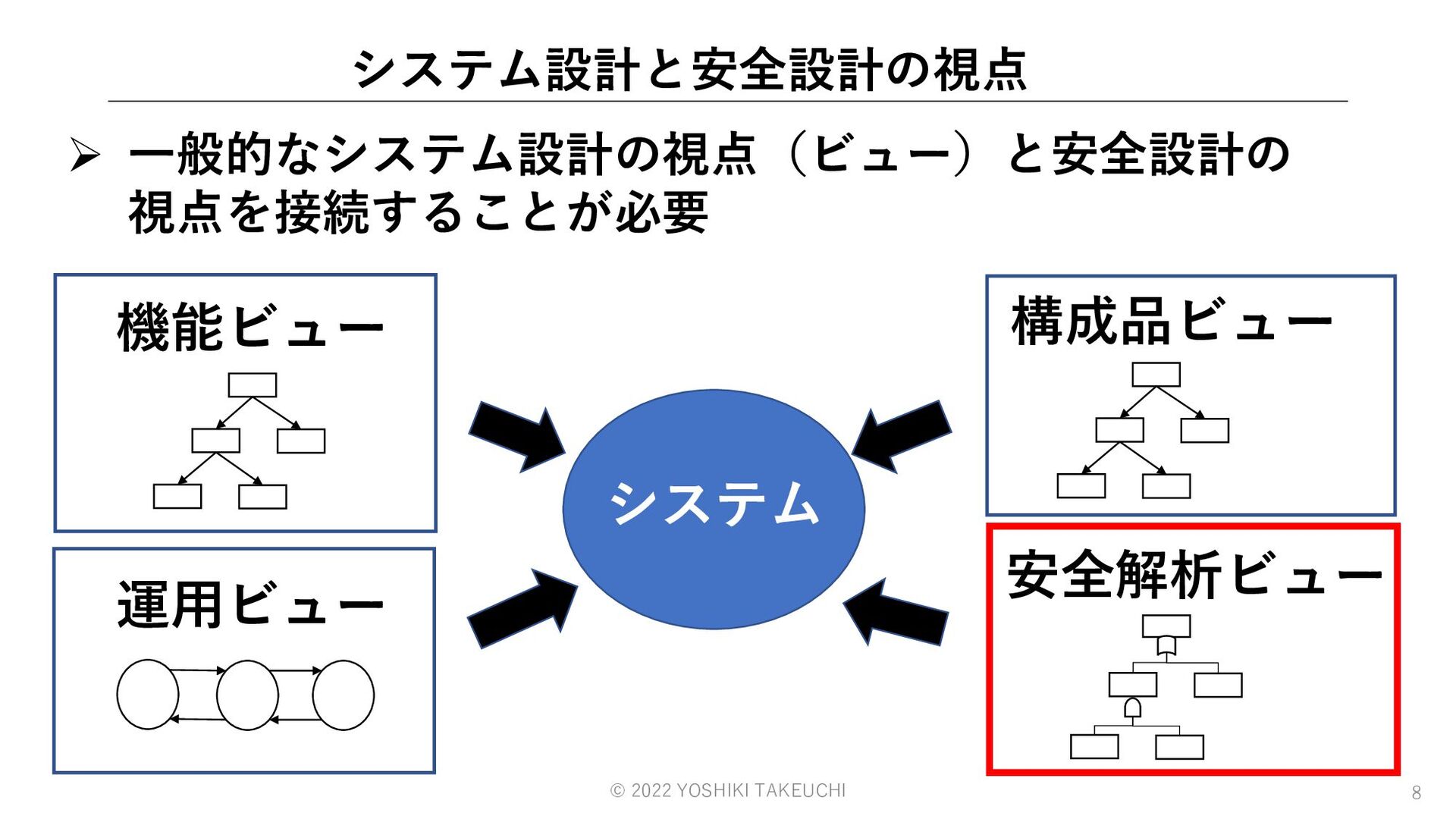
システム設計と安全設計の視点 ➢ 一般的なシステム設計の視点(ビュー)と安全設計の 視点を接続することが必要 機能ビュー 運用ビュー 構成品ビュー 安全解析ビュー システム 8
© 2022 YOSHIKI TAKEUCHI
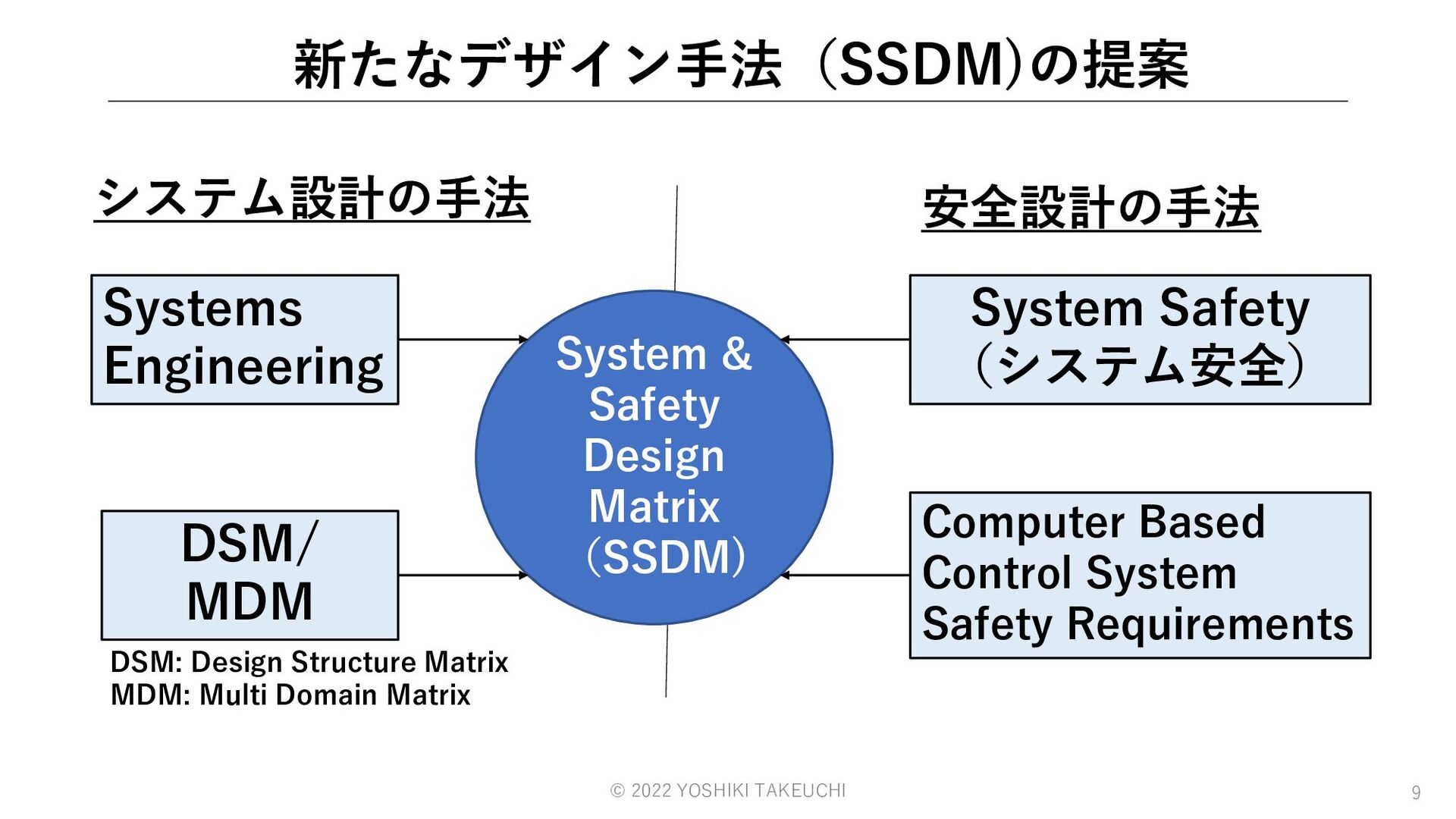
System & Safety Design Matrix (SSDM) System Safety (システム安全) Computer
Based Control System Safety Requirements 新たなデザイン手法(SSDM)の提案 Systems Engineering DSM/ MDM DSM: Design Structure Matrix MDM: Multi Domain Matrix システム設計の手法 安全設計の手法 9 © 2022 YOSHIKI TAKEUCHI
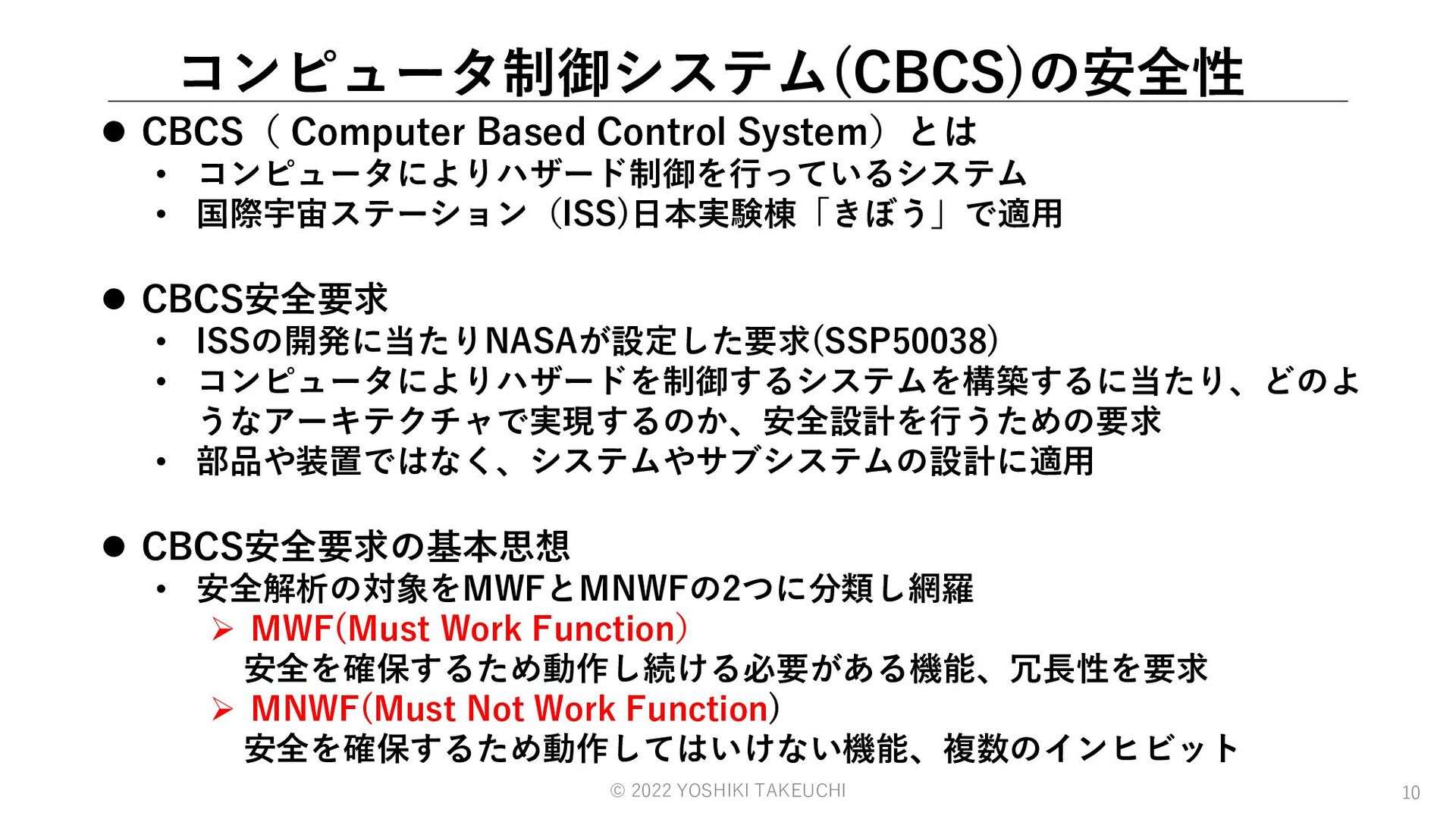
コンピュータ制御システム(CBCS)の安全性 ⚫ CBCS( Computer Based Control System)とは • コンピュータによりハザード制御を行っているシステム •
国際宇宙ステーション(ISS)日本実験棟「きぼう」で適用 ⚫ CBCS安全要求 • ISSの開発に当たりNASAが設定した要求(SSP50038) • コンピュータによりハザードを制御するシステムを構築するに当たり、どのよ うなアーキテクチャで実現するのか、安全設計を行うための要求 • 部品や装置ではなく、システムやサブシステムの設計に適用 ⚫ CBCS安全要求の基本思想 • 安全解析の対象をMWFとMNWFの2つに分類し網羅 ➢ MWF(Must Work Function) 安全を確保するため動作し続ける必要がある機能、冗長性を要求 ➢ MNWF(Must Not Work Function) 安全を確保するため動作してはいけない機能、複数のインヒビット 10 © 2022 YOSHIKI TAKEUCHI
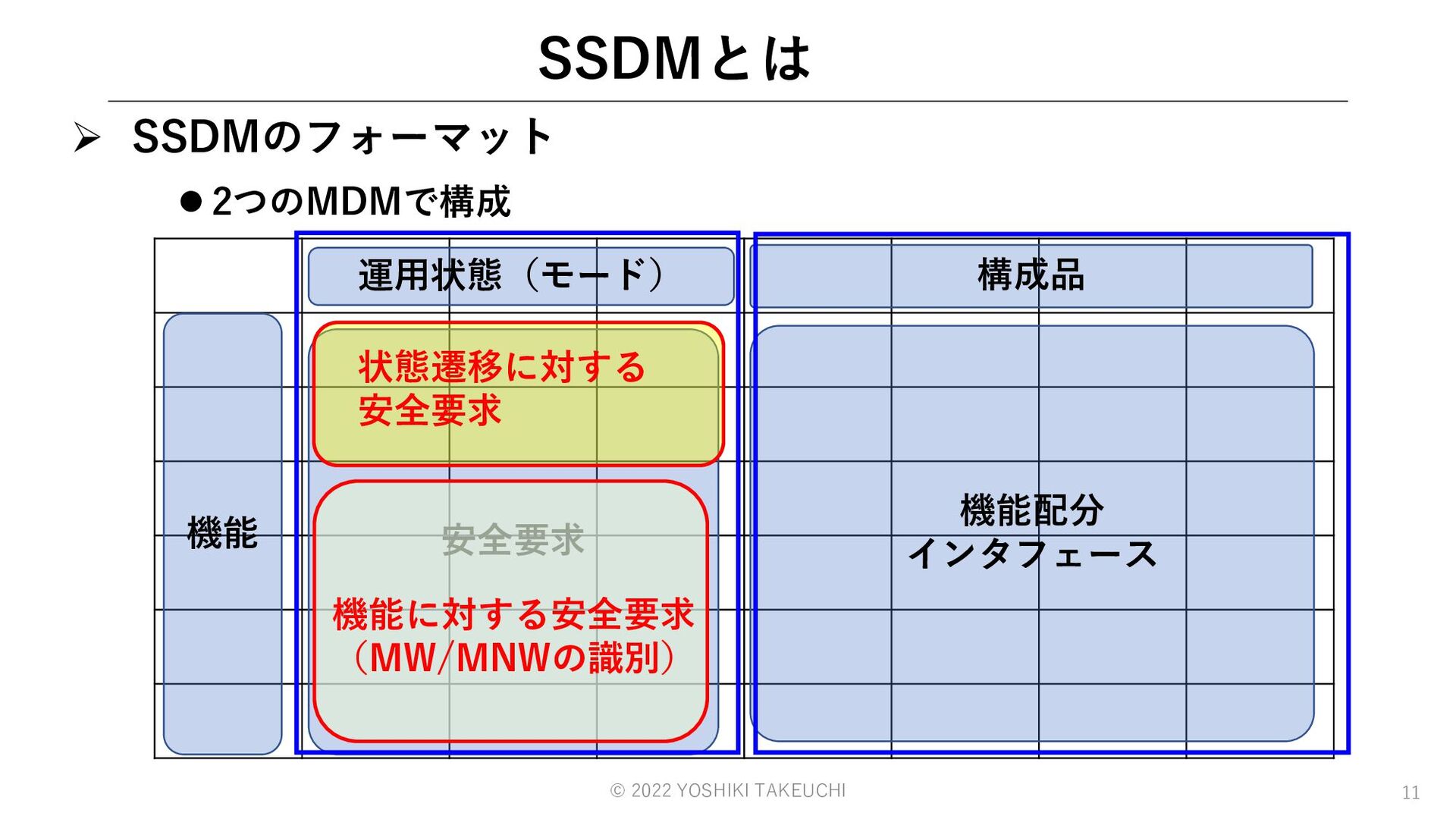
SSDMとは 機能 運用状態(モード) 安全要求 機能配分 インタフェース 状態遷移に対する 安全要求 機能に対する安全要求 (MW/MNWの識別)
➢ SSDMのフォーマット 構成品 ⚫ 2つのMDMで構成 11 © 2022 YOSHIKI TAKEUCHI
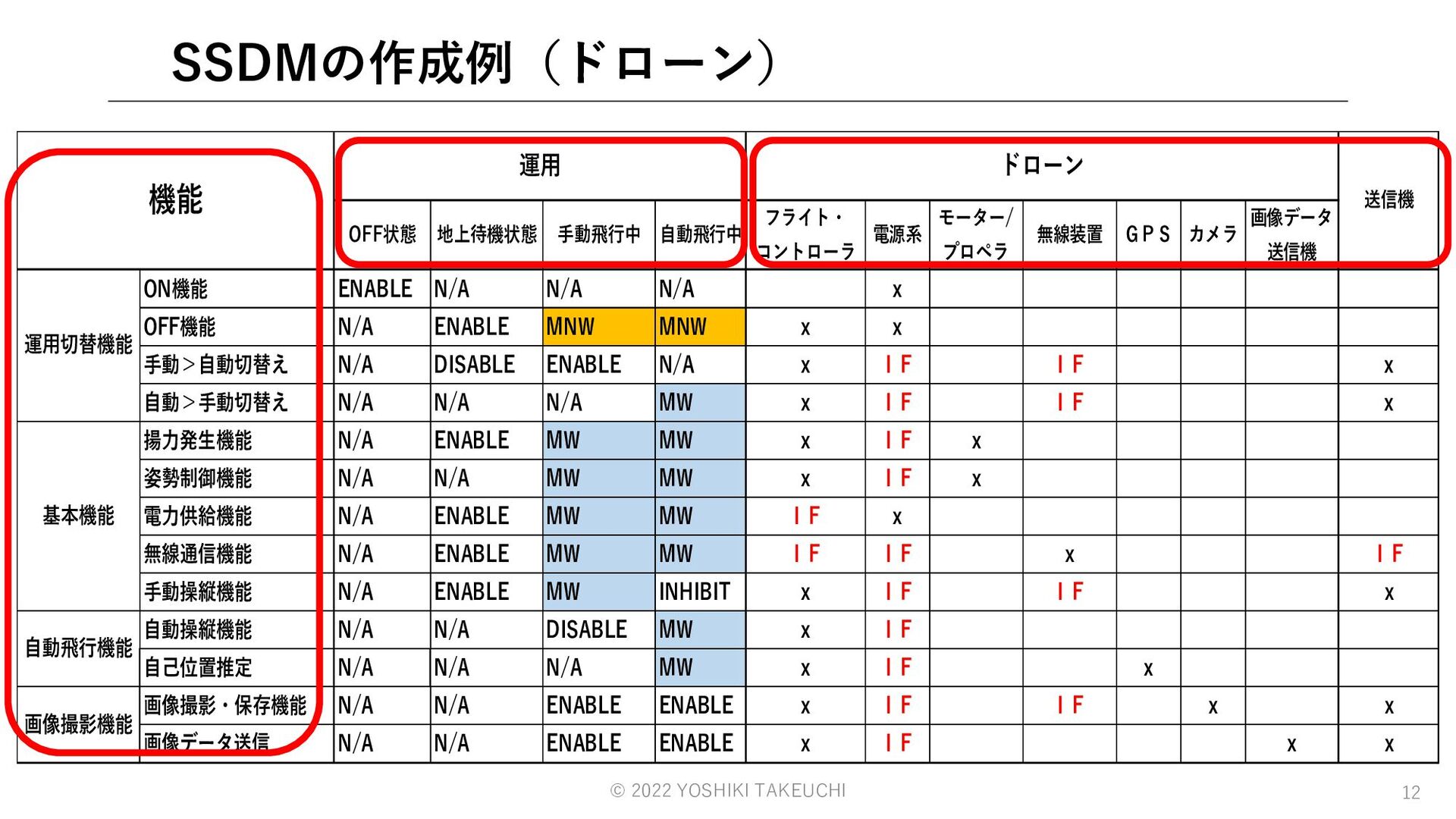
OFF状態 地上待機状態 手動飛行中 自動飛行中 フライト・ コントローラ 電源系 モーター/ プロペラ 無線装置
GPS カメラ 画像データ 送信機 ON機能 ENABLE N/A N/A N/A x OFF機能 N/A ENABLE MNW MNW x x 手動>自動切替え N/A DISABLE ENABLE N/A x IF IF x 自動>手動切替え N/A N/A N/A MW x IF IF x 揚力発生機能 N/A ENABLE MW MW x IF x 姿勢制御機能 N/A N/A MW MW x IF x 電力供給機能 N/A ENABLE MW MW IF x 無線通信機能 N/A ENABLE MW MW IF IF x IF 手動操縦機能 N/A ENABLE MW INHIBIT x IF IF x 自動操縦機能 N/A N/A DISABLE MW x IF 自己位置推定 N/A N/A N/A MW x IF x 画像撮影・保存機能 N/A N/A ENABLE ENABLE x IF IF x x 画像データ送信 N/A N/A ENABLE ENABLE x IF x x 送信機 自動飛行機能 画像撮影機能 ドローン 運用切替機能 運用 機能 基本機能 SSDMの作成例(ドローン) 12 © 2022 YOSHIKI TAKEUCHI
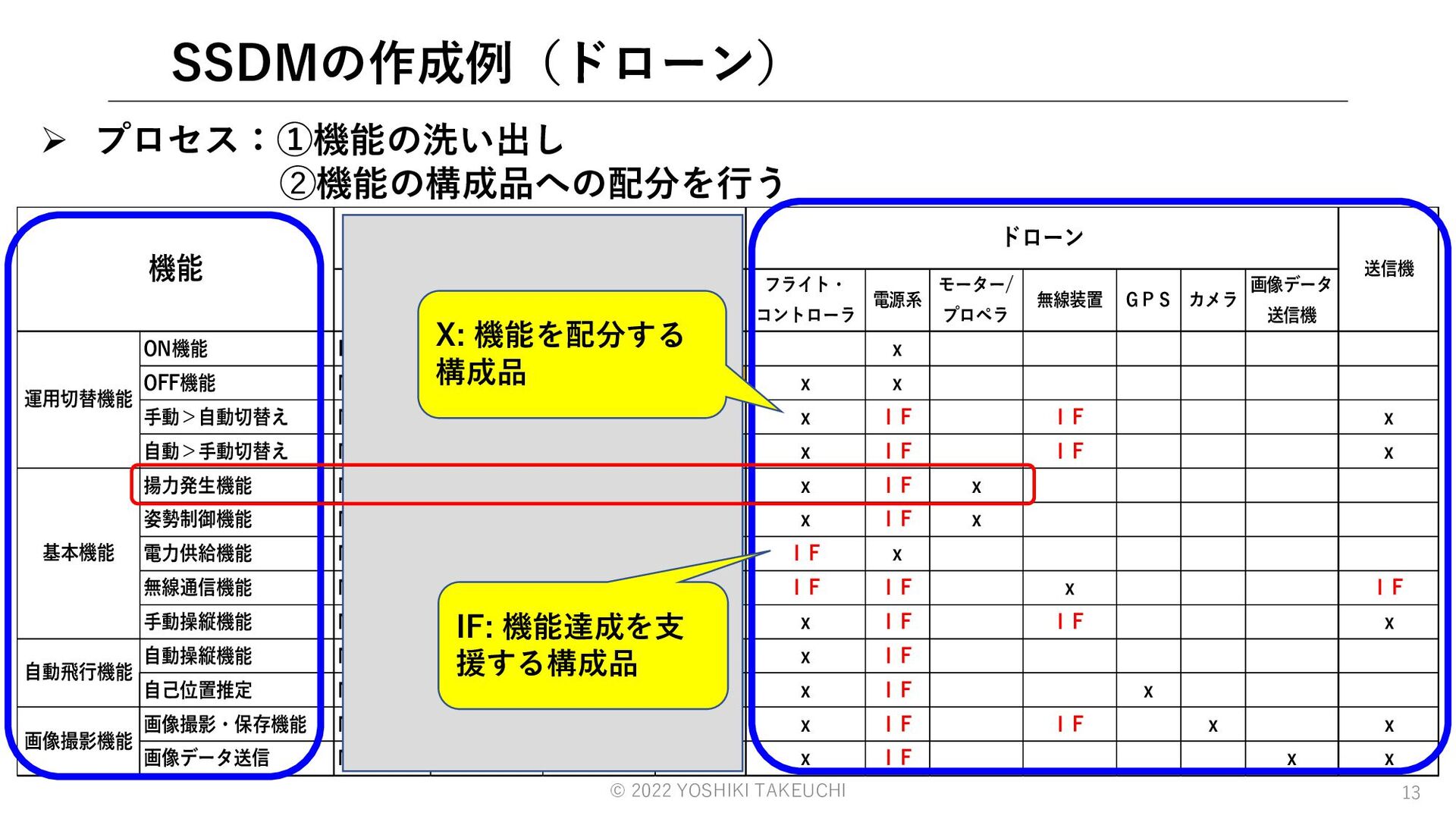
OFF状態 地上待機状態 手動飛行中 自動飛行中 フライト・ コントローラ 電源系 モーター/ プロペラ 無線装置
GPS カメラ 画像データ 送信機 ON機能 ENABLE N/A N/A N/A x OFF機能 N/A ENABLE MNW MNW x x 手動>自動切替え N/A DISABLE ENABLE N/A x IF IF x 自動>手動切替え N/A N/A N/A MW x IF IF x 揚力発生機能 N/A ENABLE MW MW x IF x 姿勢制御機能 N/A N/A MW MW x IF x 電力供給機能 N/A ENABLE MW MW IF x 無線通信機能 N/A ENABLE MW MW IF IF x IF 手動操縦機能 N/A ENABLE MW INHIBIT x IF IF x 自動操縦機能 N/A N/A DISABLE MW x IF 自己位置推定 N/A N/A N/A MW x IF x 画像撮影・保存機能 N/A N/A ENABLE ENABLE x IF IF x x 画像データ送信 N/A N/A ENABLE ENABLE x IF x x 送信機 自動飛行機能 画像撮影機能 ドローン 運用切替機能 運用 機能 基本機能 SSDMの作成例(ドローン) ➢ プロセス:①機能の洗い出し ➁機能の構成品への配分を行う IF: 機能達成を支 援する構成品 X: 機能を配分する 構成品 13 © 2022 YOSHIKI TAKEUCHI
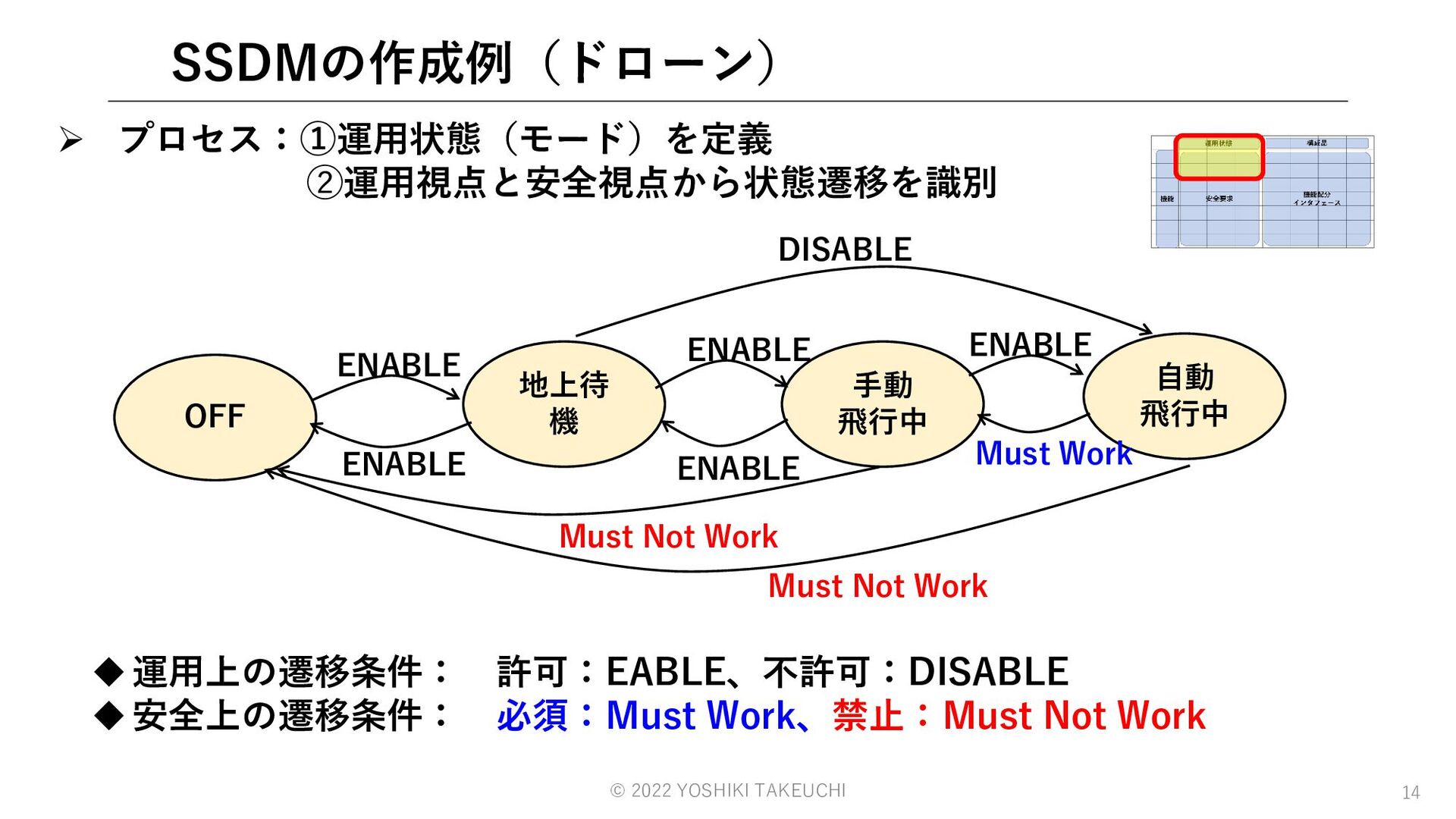
OFF 地上待 機 手動 飛行中 自動 飛行中 ENABLE ENABLE ENABLE
ENABLE ENABLE Must Work DISABLE Must Not Work Must Not Work ➢ プロセス:①運用状態(モード)を定義 ➁運用視点と安全視点から状態遷移を識別 SSDMの作成例(ドローン) ◆運用上の遷移条件: 許可:EABLE、不許可:DISABLE ◆安全上の遷移条件: 必須:Must Work、禁止:Must Not Work 14 © 2022 YOSHIKI TAKEUCHI
OFF状態 地上待機状態 手動飛行中 自動飛行中 フライト・ コントローラ 電源系 モーター/ プロペラ 無線装置
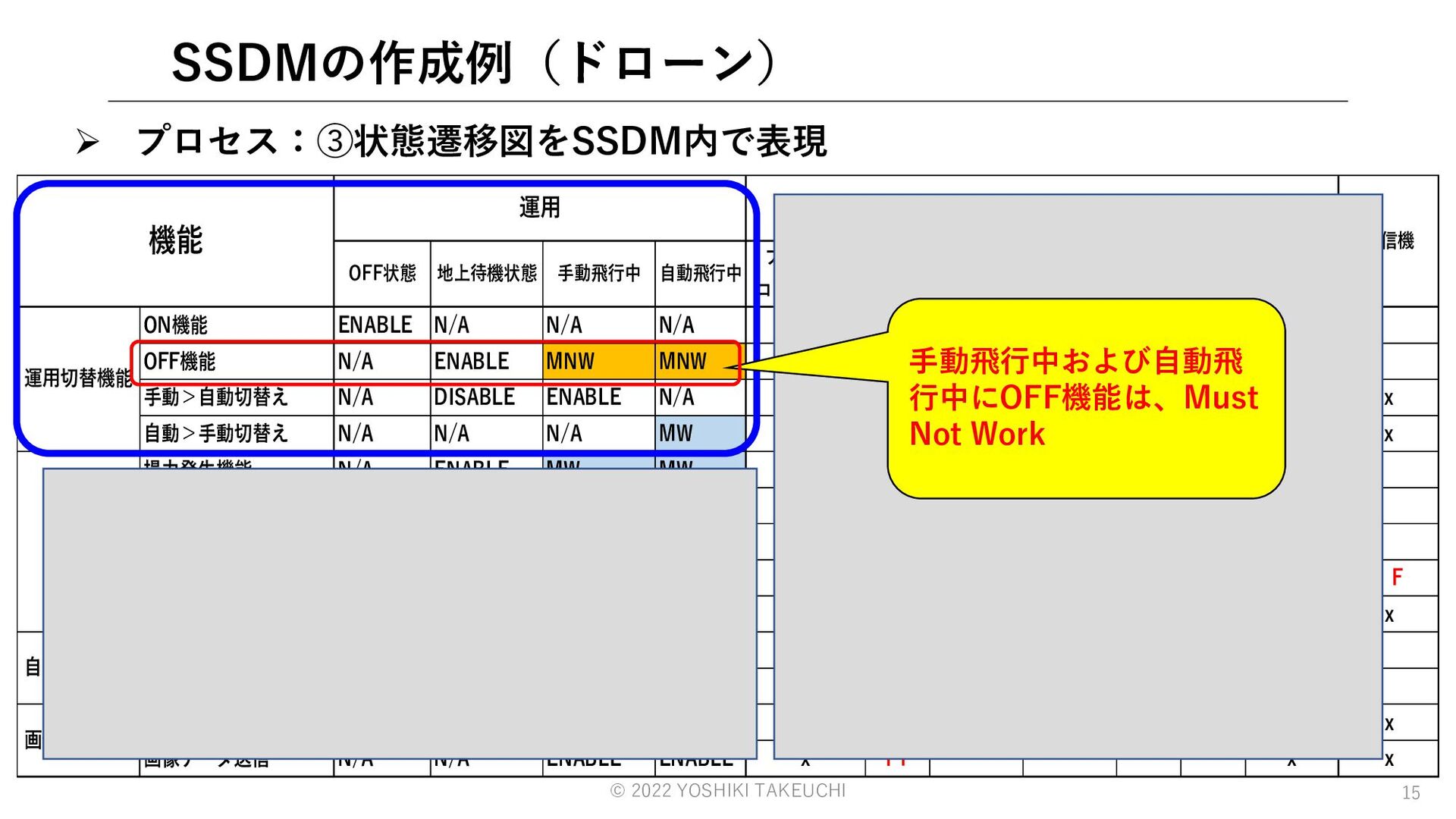
GPS カメラ 画像データ 送信機 ON機能 ENABLE N/A N/A N/A x OFF機能 N/A ENABLE MNW MNW x x 手動>自動切替え N/A DISABLE ENABLE N/A x IF IF x 自動>手動切替え N/A N/A N/A MW x IF IF x 揚力発生機能 N/A ENABLE MW MW x IF x 姿勢制御機能 N/A N/A MW MW x IF x 電力供給機能 N/A ENABLE MW MW IF x 無線通信機能 N/A ENABLE MW MW IF IF x IF 手動操縦機能 N/A ENABLE MW INHIBIT x IF IF x 自動操縦機能 N/A N/A DISABLE MW x IF 自己位置推定 N/A N/A N/A MW x IF x 画像撮影・保存機能 N/A N/A ENABLE ENABLE x IF IF x x 画像データ送信 N/A N/A ENABLE ENABLE x IF x x 送信機 自動飛行機能 画像撮影機能 ドローン 運用切替機能 運用 機能 基本機能 SSDMの作成例(ドローン) ➢ プロセス:➂状態遷移図をSSDM内で表現 手動飛行中および自動飛 行中にOFF機能は、Must Not Work 15 © 2022 YOSHIKI TAKEUCHI
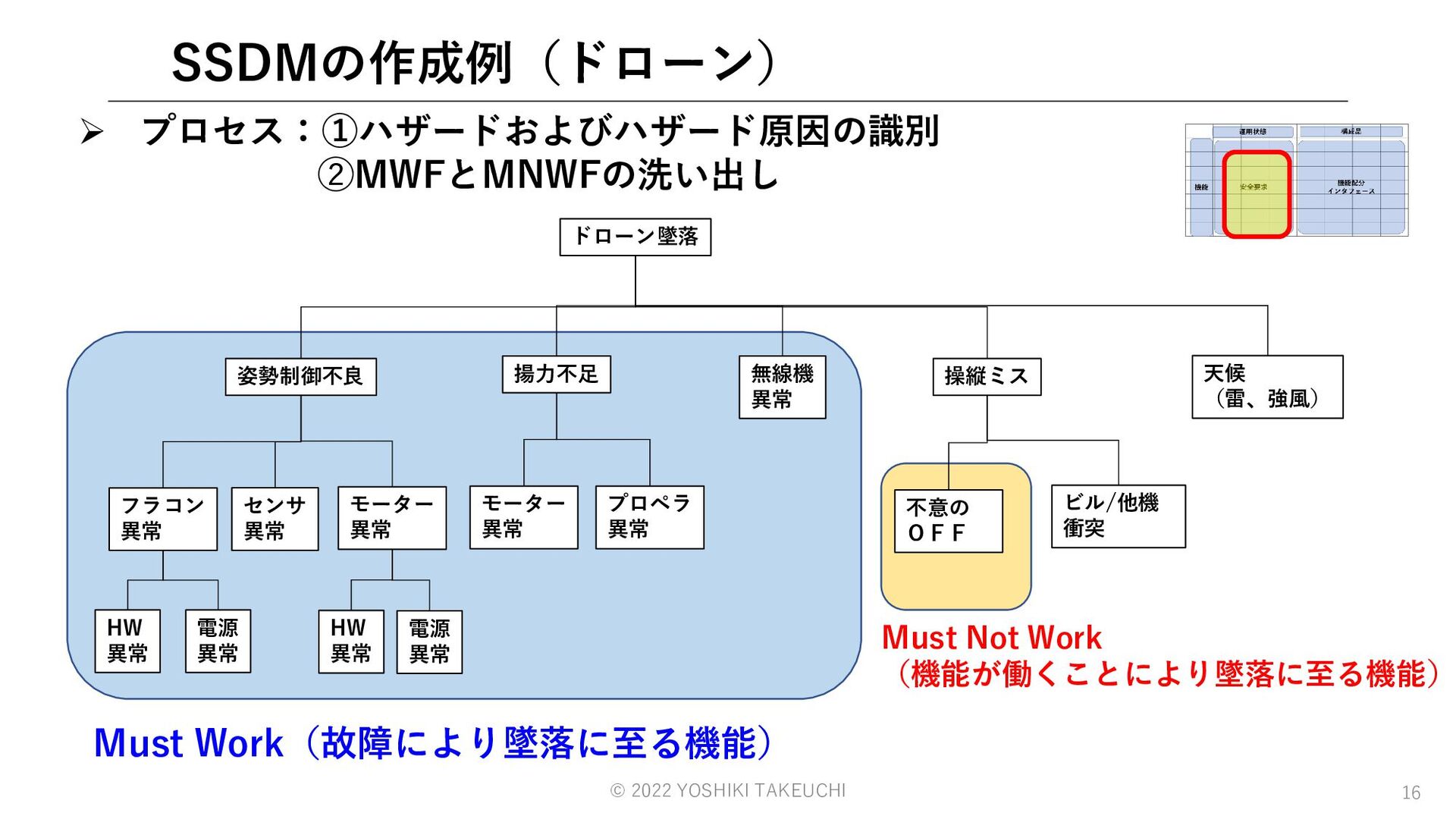
Must Not Work (機能が働くことにより墜落に至る機能) Must Work(故障により墜落に至る機能) ドローン墜落 天候 (雷、強風) 操縦ミス
姿勢制御不良 フラコン 異常 センサ 異常 モーター 異常 揚力不足 モーター 異常 プロペラ 異常 無線機 異常 不意の OFF ビル/他機 衝突 HW 異常 電源 異常 HW 異常 電源 異常 ➢ プロセス:①ハザードおよびハザード原因の識別 ➁MWFとMNWFの洗い出し SSDMの作成例(ドローン) 16 © 2022 YOSHIKI TAKEUCHI
OFF状態 地上待機状態 手動飛行中 自動飛行中 フライト・ コントローラ 電源系 モーター/ プロペラ 無線装置
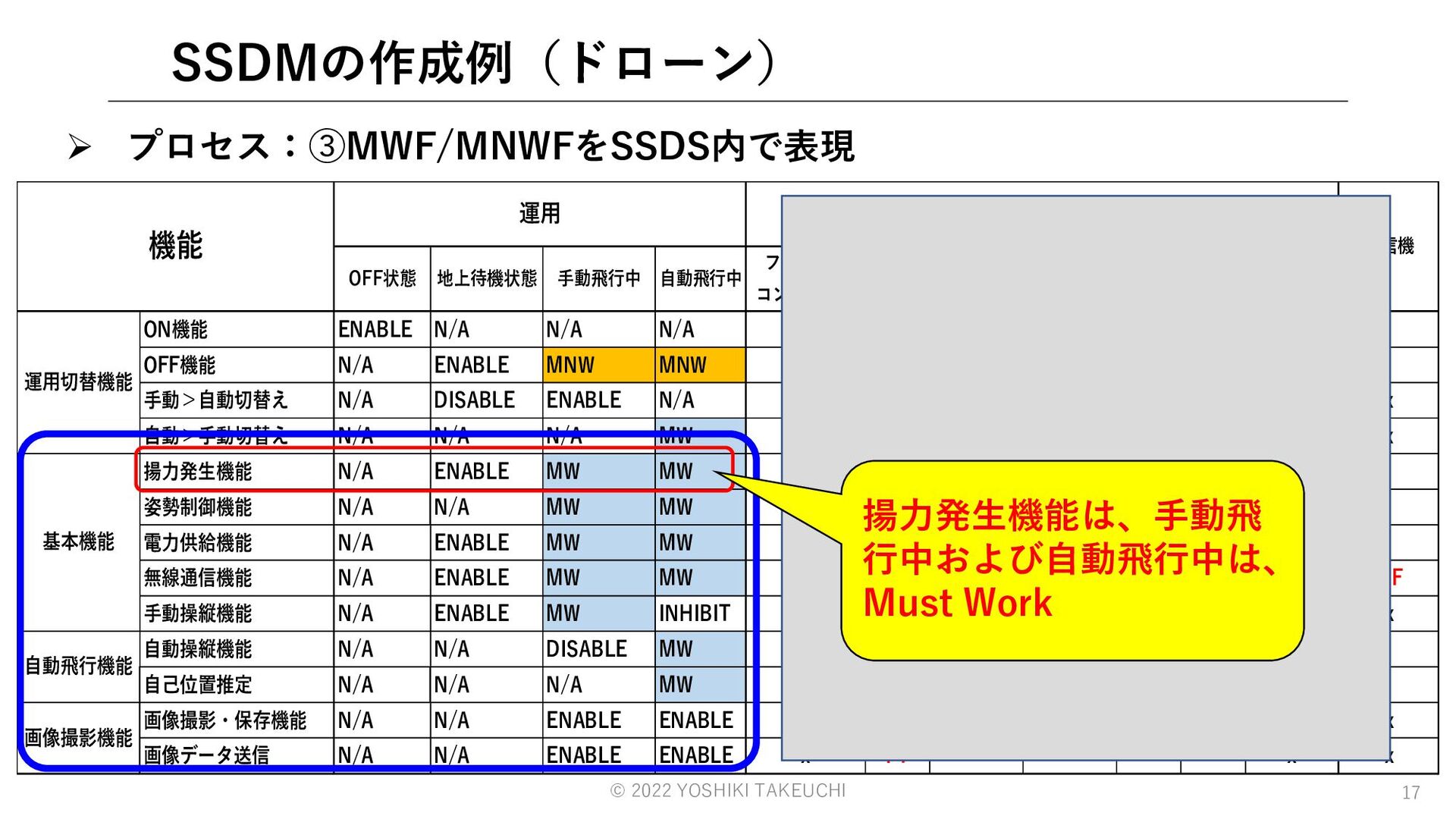
GPS カメラ 画像データ 送信機 ON機能 ENABLE N/A N/A N/A x OFF機能 N/A ENABLE MNW MNW x x 手動>自動切替え N/A DISABLE ENABLE N/A x IF IF x 自動>手動切替え N/A N/A N/A MW x IF IF x 揚力発生機能 N/A ENABLE MW MW x IF x 姿勢制御機能 N/A N/A MW MW x IF x 電力供給機能 N/A ENABLE MW MW IF x 無線通信機能 N/A ENABLE MW MW IF IF x IF 手動操縦機能 N/A ENABLE MW INHIBIT x IF IF x 自動操縦機能 N/A N/A DISABLE MW x IF 自己位置推定 N/A N/A N/A MW x IF x 画像撮影・保存機能 N/A N/A ENABLE ENABLE x IF IF x x 画像データ送信 N/A N/A ENABLE ENABLE x IF x x 送信機 自動飛行機能 画像撮影機能 ドローン 運用切替機能 運用 機能 基本機能 SSDMの作成例(ドローン) ➢ プロセス:➂MWF/MNWFをSSDS内で表現 揚力発生機能は、手動飛 行中および自動飛行中は、 Must Work 17 © 2022 YOSHIKI TAKEUCHI
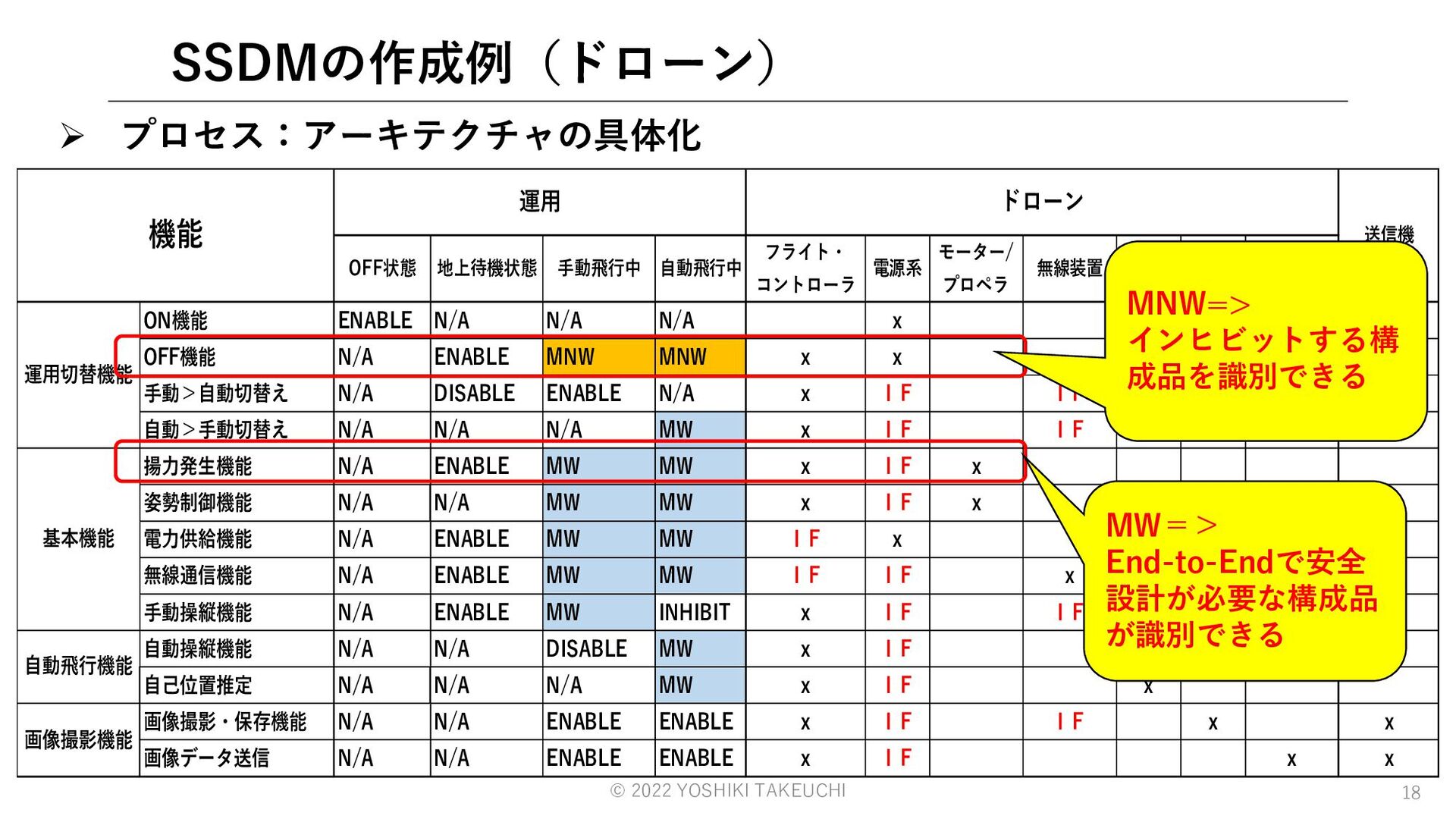
OFF状態 地上待機状態 手動飛行中 自動飛行中 フライト・ コントローラ 電源系 モーター/ プロペラ 無線装置
GPS カメラ 画像データ 送信機 ON機能 ENABLE N/A N/A N/A x OFF機能 N/A ENABLE MNW MNW x x 手動>自動切替え N/A DISABLE ENABLE N/A x IF IF x 自動>手動切替え N/A N/A N/A MW x IF IF x 揚力発生機能 N/A ENABLE MW MW x IF x 姿勢制御機能 N/A N/A MW MW x IF x 電力供給機能 N/A ENABLE MW MW IF x 無線通信機能 N/A ENABLE MW MW IF IF x IF 手動操縦機能 N/A ENABLE MW INHIBIT x IF IF x 自動操縦機能 N/A N/A DISABLE MW x IF 自己位置推定 N/A N/A N/A MW x IF x 画像撮影・保存機能 N/A N/A ENABLE ENABLE x IF IF x x 画像データ送信 N/A N/A ENABLE ENABLE x IF x x 送信機 自動飛行機能 画像撮影機能 ドローン 運用切替機能 運用 機能 基本機能 SSDMの作成例(ドローン) ➢ プロセス:アーキテクチャの具体化 MNW=> インヒビットする構 成品を識別できる MW=> End-to-Endで安全 設計が必要な構成品 が識別できる 18 © 2022 YOSHIKI TAKEUCHI
まとめ ⚫ システム設計で安全に関するアーキテクチャ設計を効率的かつ 確実に進める新たな手法としてSSDMを考案 ⚫ SSDMは、以下の観点で極めて有効な手法である • 機能、運用、構成品、安全の視点からシステムを見える化 • 運用状態(モード)に対応して、働くべき機能(MW)と働いてはなら
ない機能(MNW)を識別 • 安全に関わるシステム機能と構成品の関係をEnd-to-endで表現 ⚫ 本手法は、特に複雑なシステム、大規模システムに有効 ⚫ 筆者は多数のシステム検討で活用済み 19 © 2022 YOSHIKI TAKEUCHI
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}