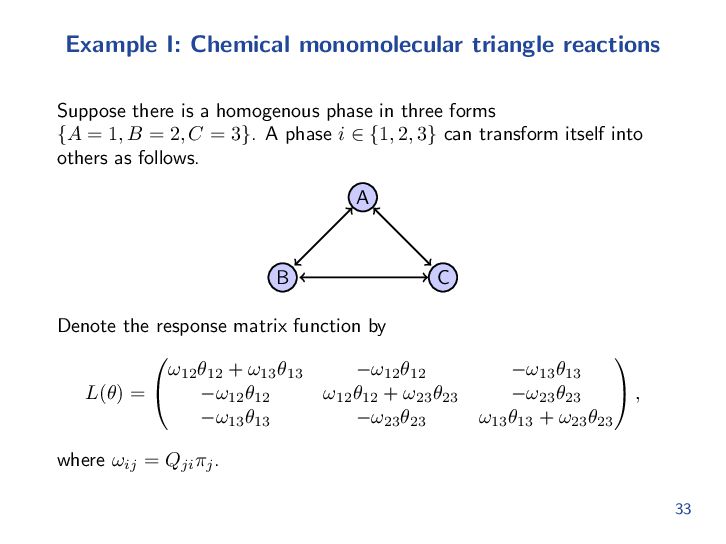
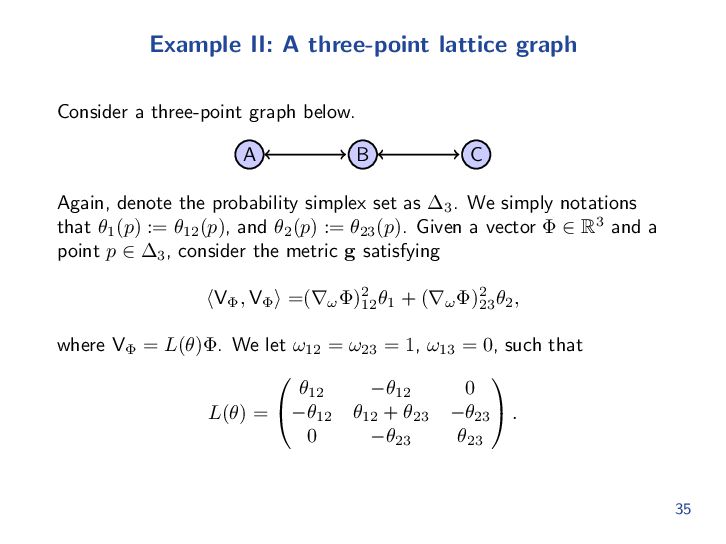
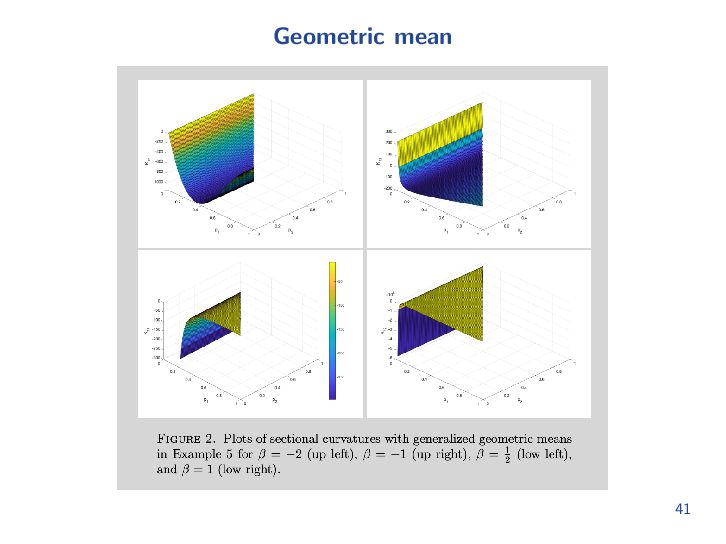
Onsager reciprocal relations model physical irreversible processes from complex systems. Recently, it has been shown that Onsager principles for master equations on finite states introduce a class of Riemannian metrics on the probability simplex, leading to probability manifolds or finite-state Wasserstein--2 spaces. In this paper, we study geometric calculations on probability manifolds, deriving the Levi-Civita connection, gradient, Hessian operators of energies, parallel transport, and calculating both the Riemannian and sectional curvatures. We present two examples of geometric quantities in probability manifolds. One example is the Levi-Civita connection from the chemical monomolecular triangle reaction. The other example is the sectional, Ricci, and scalar curvatures in Wasserstein space on a three-point lattice graph.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}