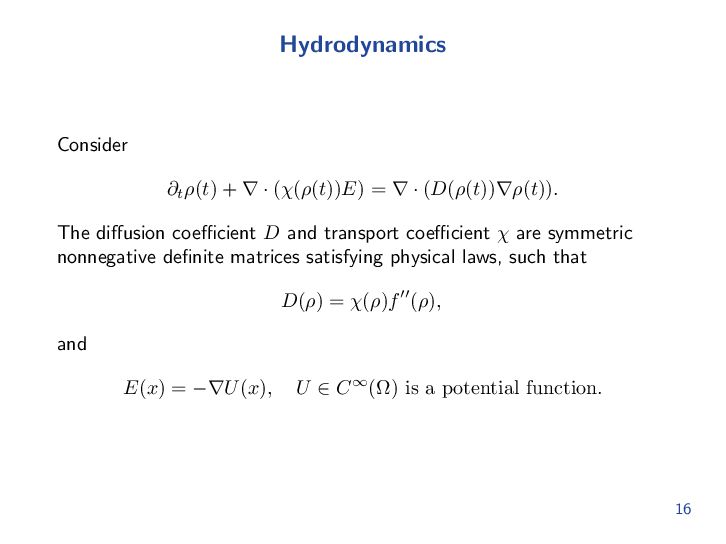
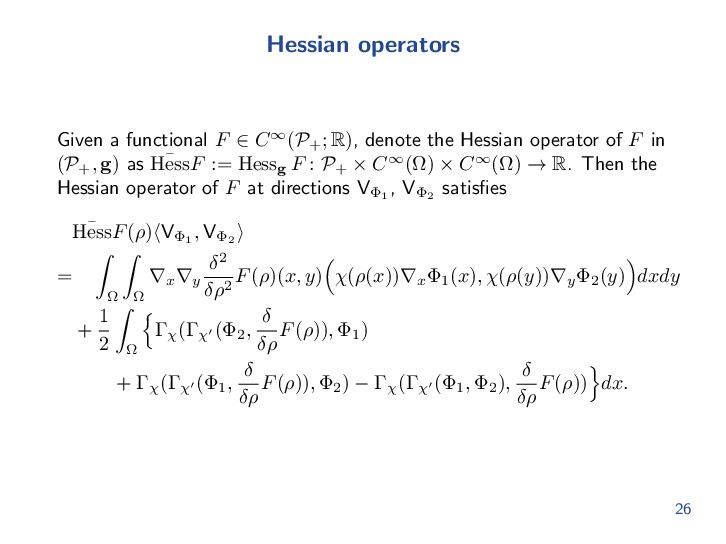
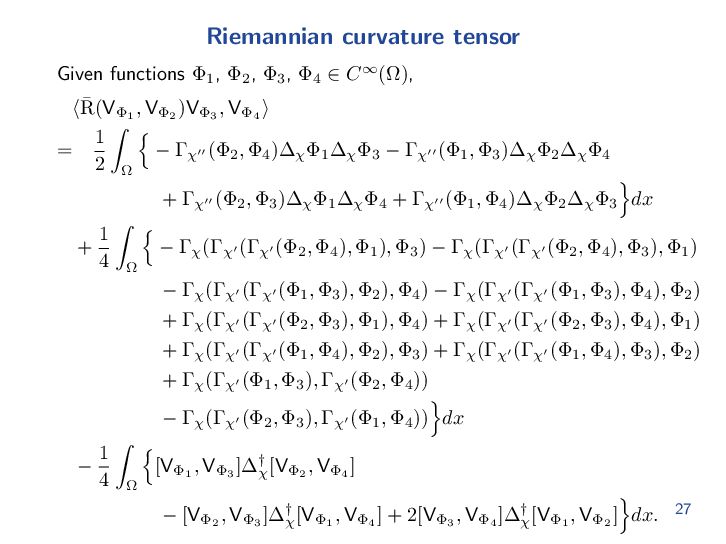
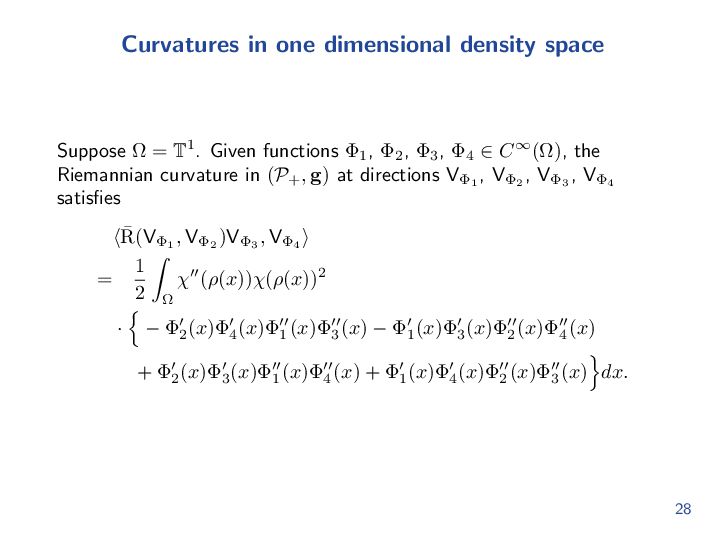
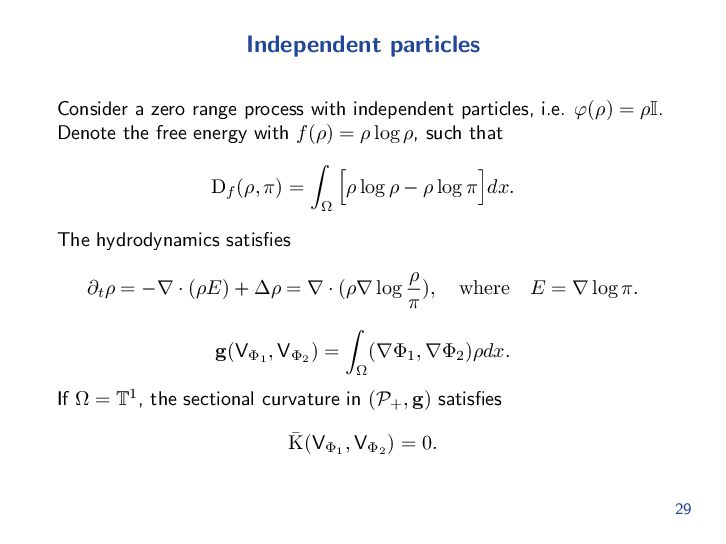
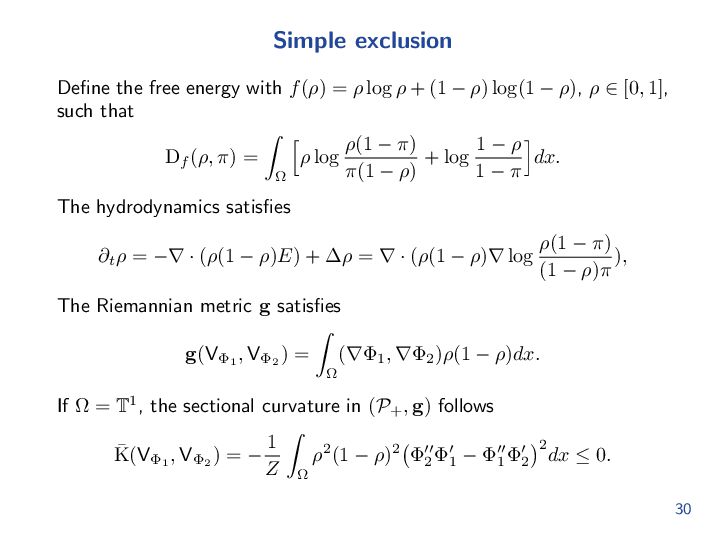
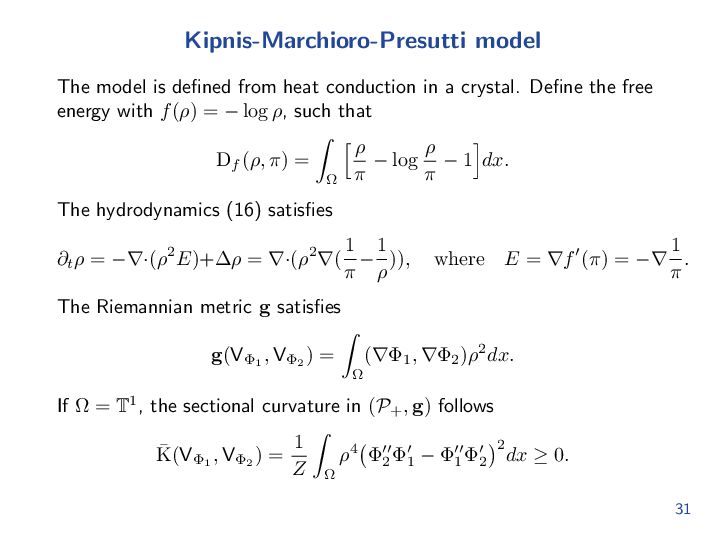
Hydrodynamics describes the evolution of macroscopic states in non–equilibrium thermodynamics. Following Onsager reciprocal relations, one can formulate a large class of hydrodynamic equations as gradient flows of free energies. In recent years, such Onsager gradient flows have been extensively investigated on optimal transport type metric spaces with nonlinear mobilities, known as hydrodynamical density manifolds. A typical example is the gradient–drift Fokker–Planck equation, which can be characterized as the gradient flow of the free energy in the Wasserstein-2 metric space. This paper studies geometric calculations on general hydrodynamical density manifolds. We first formulate the associated Levi–Civita connections, gradients, Hessians, and parallel transports, and then derive the corresponding Riemannian and sectional curvatures. Finally, we obtain closed-form formulas for sectional curvatures in one dimensional density manifolds, where the signs of the curvatures are determined by the convexity of the mobility functions. As illustrations, we present density manifolds and their sectional curvatures for several zero range models, including independent particle systems, simple exclusion processes, and Kipnis–Marchioro–Presutti models.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}