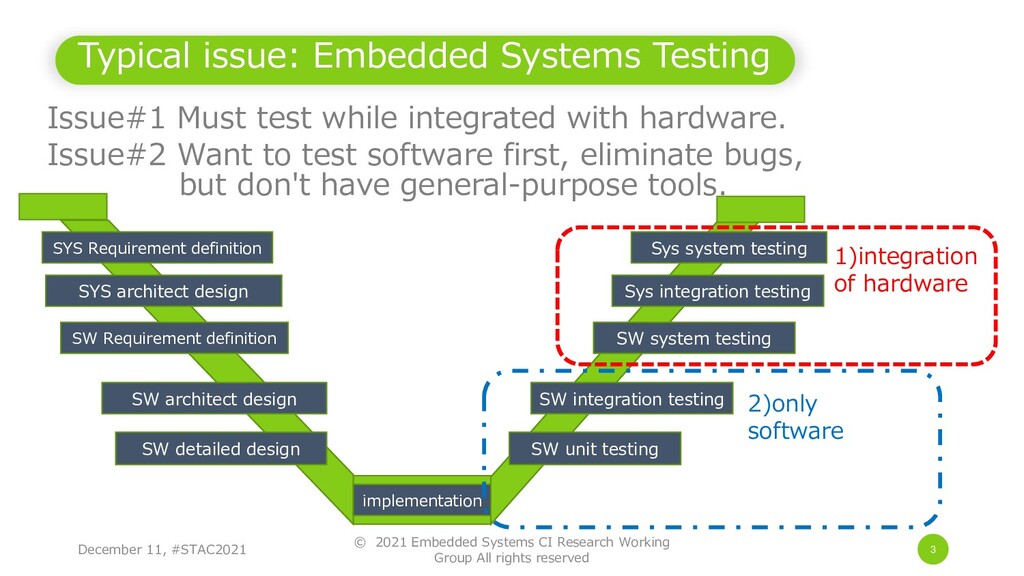
rights reserved December 11, #STAC2021 Issue#1 Must test while integrated with hardware. implementation SYS Requirement definition SW Requirement definition SW architect design SW detailed design SYS architect design SW unit testing SW integration testing SW system testing Sys integration testing Sys system testing Typical issue: Embedded Systems Testing 2)only software 1)integration of hardware Issue#2 Want to test software first, eliminate bugs, but don't have general-purpose tools.
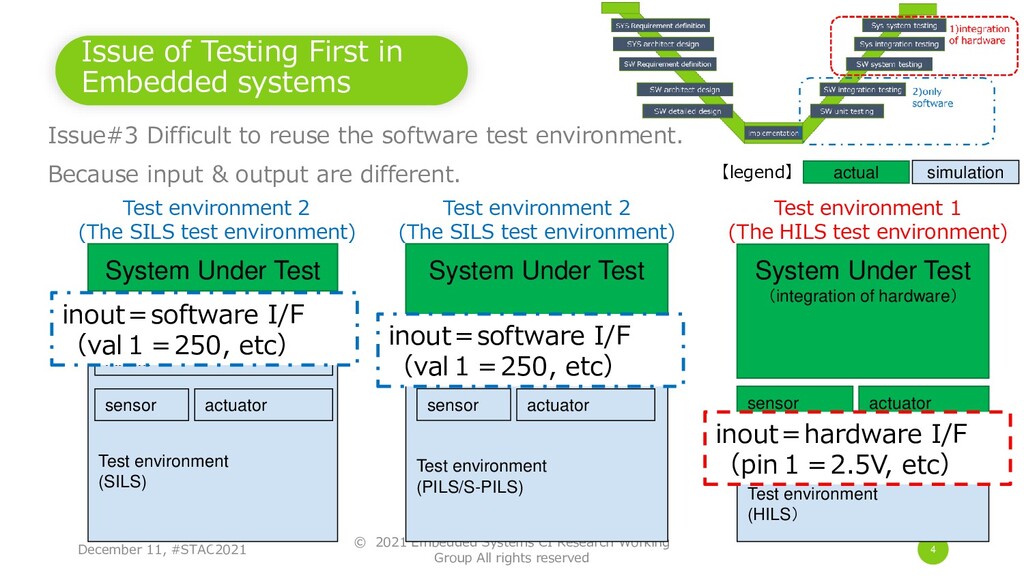
rights reserved December 11, #STAC2021 Issue#3 Difficult to reuse the software test environment. Because input & output are different. System Under Test Test environment (SILS) sensor actuator micom Software Test environment (HILS) System Under Test (integration of hardware) sensor actuator System Under Test Test environment (PILS/S-PILS) sensor actuator actual simulation 【legend】 Test environment 1 (The HILS test environment) Test environment 2 (The SILS test environment) inout=hardware I/F (pin1=2.5V, etc) inout=software I/F (val1=250, etc) inout=software I/F (val1=250, etc) Issue of Testing First in Embedded systems Test environment 2 (The SILS test environment) 1 1
CI Research Working Group All rights reserved 5 《Issues》 - Must test while integrated with hardware. - Want to test software first, eliminate bugs, but don't have general-purpose tools. - Difficult to reuse the software test environment. Because input & output are different. 《Solutions》 - Create a SILS environment using open source. - To make test scenario to be common in different test environments. - Implements(Libraries) hide difference between test environments.
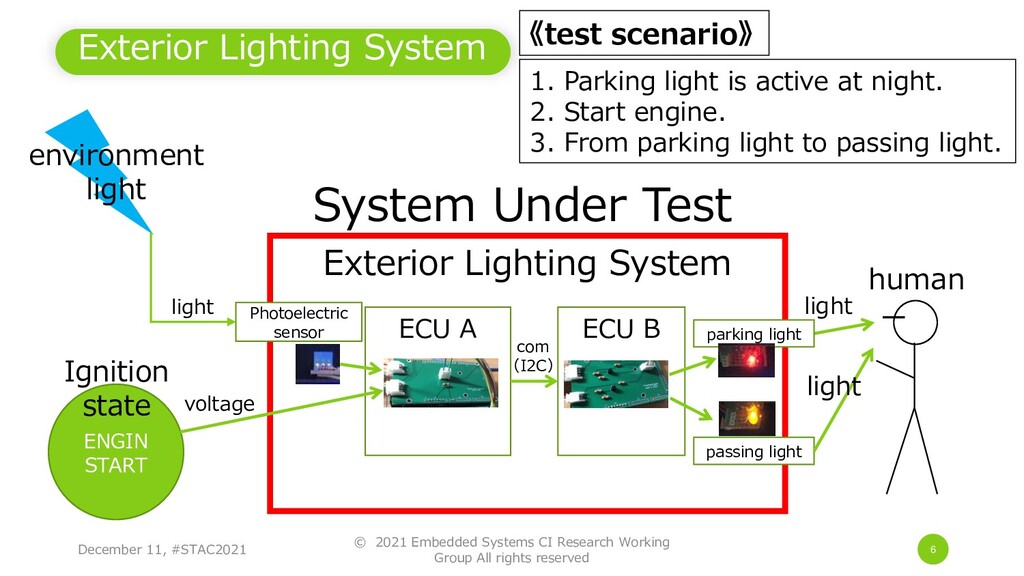
2021 Embedded Systems CI Research Working Group All rights reserved 6 environment light ENGIN START Ignition state ECU A ECU B voltage System Under Test 1. Parking light is active at night. 2. Start engine. 3. From parking light to passing light. 《test scenario》 Photoelectric sensor light parking light passing light light light com (I2C) 2 human
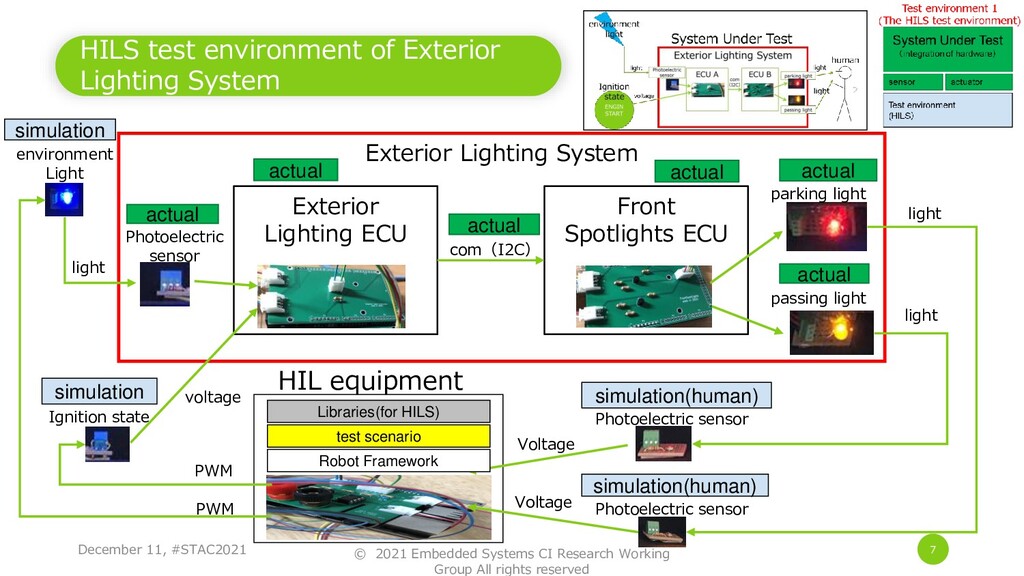
Embedded Systems CI Research Working Group All rights reserved Exterior Lighting ECU HILS test environment of Exterior Lighting System Front Spotlights ECU com(I2C) Photoelectric sensor actual actual actual simulation Ignition state simulation parking light actual passing light actual light voltage light light Voltage Voltage PWM PWM simulation(human) simulation(human) actual Robot Framework HIL equipment test scenario Libraries(for HILS) environment Light Photoelectric sensor Photoelectric sensor
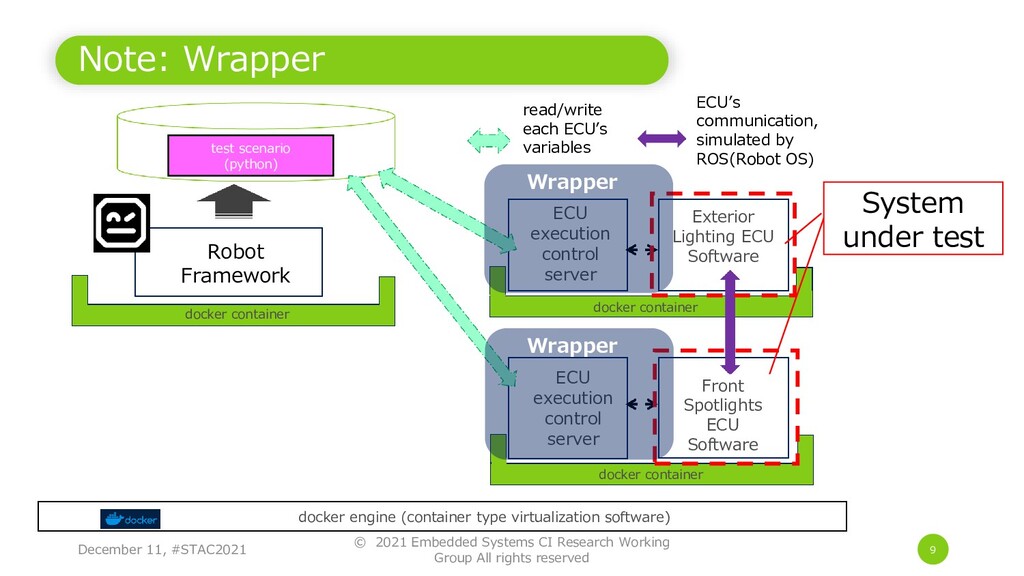
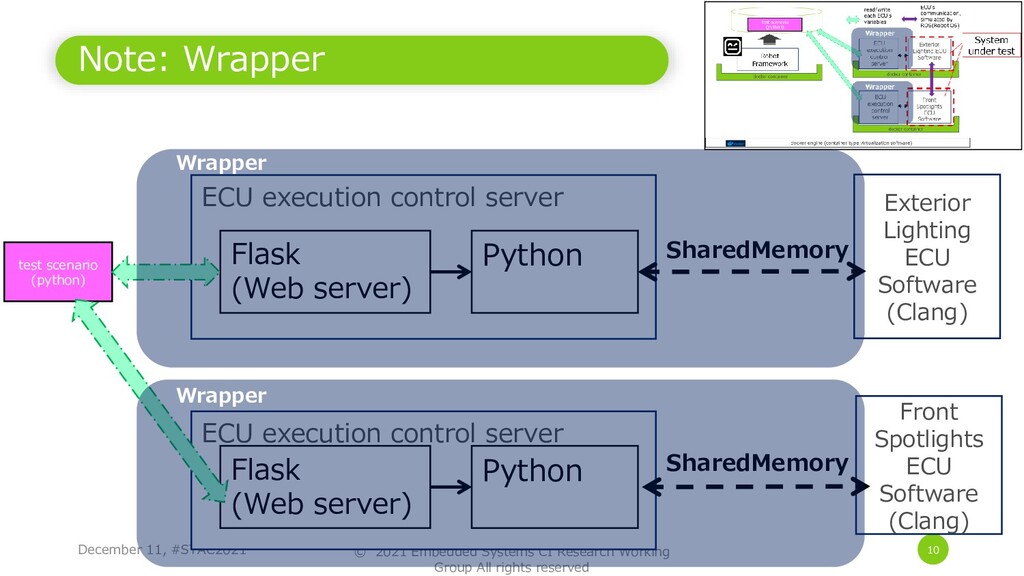
Research Working Group All rights reserved 9 wrapper Robot Framework Exterior Lighting ECU Software System under test Front Spotlights ECU Software ECU execution control server ECU execution control server docker container docker container docker engine (container type virtualization software) Wrapper Wrapper docker container test scenario (python) read/write each ECU’s variables ECU’s communication, simulated by ROS(Robot OS)
Research Working Group All rights reserved 10 ECU execution control server Flask (Web server) Python test scenario (python) ECU execution control server Flask (Web server) Python Exterior Lighting ECU Software (Clang) Front Spotlights ECU Software (Clang) SharedMemory SharedMemory Wrapper Wrapper
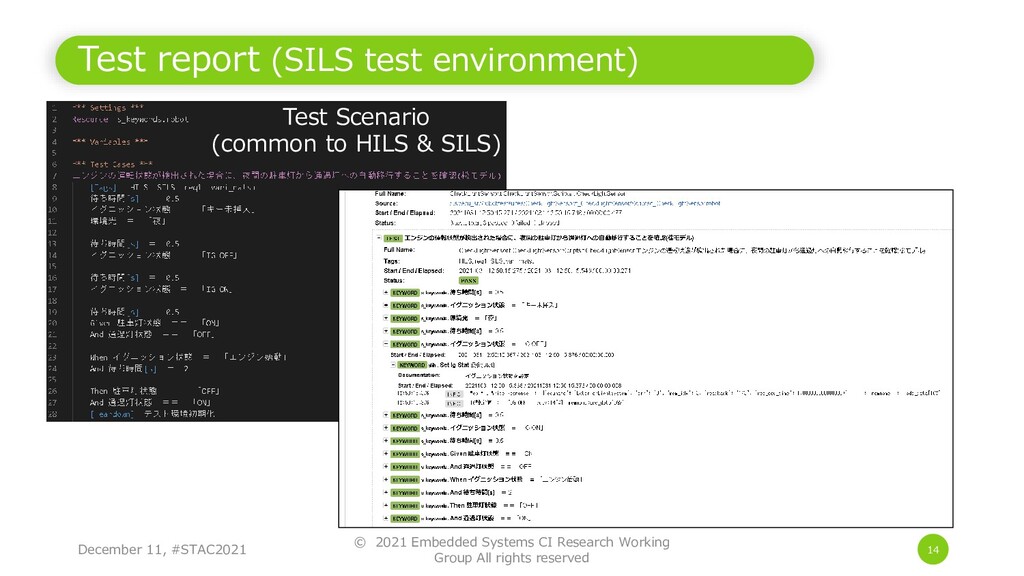
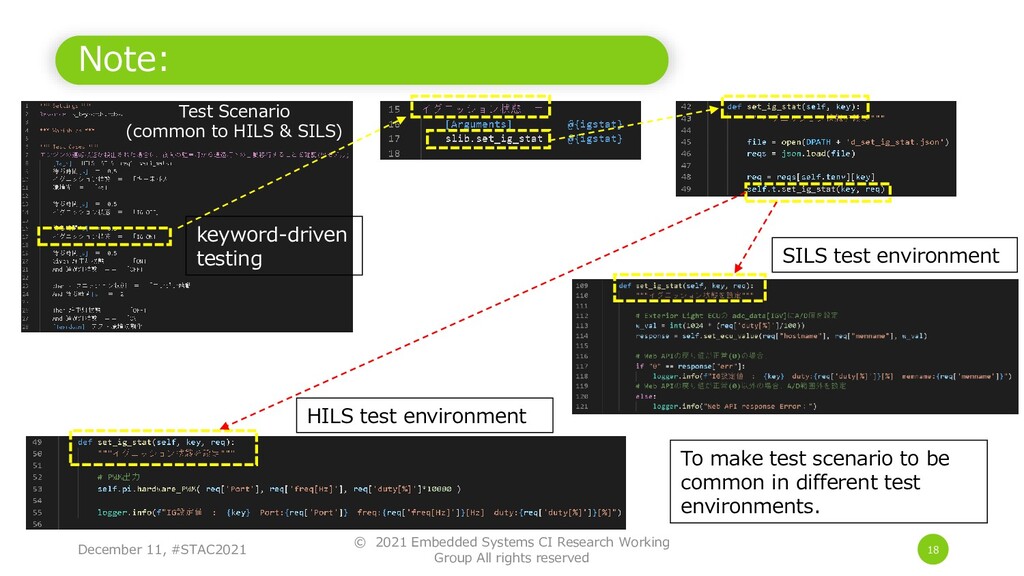
Working Group All rights reserved 18 SILS test environment HILS test environment keyword-driven testing To make test scenario to be common in different test environments. Test Scenario (common to HILS & SILS)
Research Working Group All rights reserved 19 Embedded Systems CI Research Working Group is conducting research continuous-integration/testing/deployment for Embedded Systems. If you are interested, please join us. It’s held once a month, mainly on Sundays from 13:30 to 17:00. Please contact us at the following email address. [email protected]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}