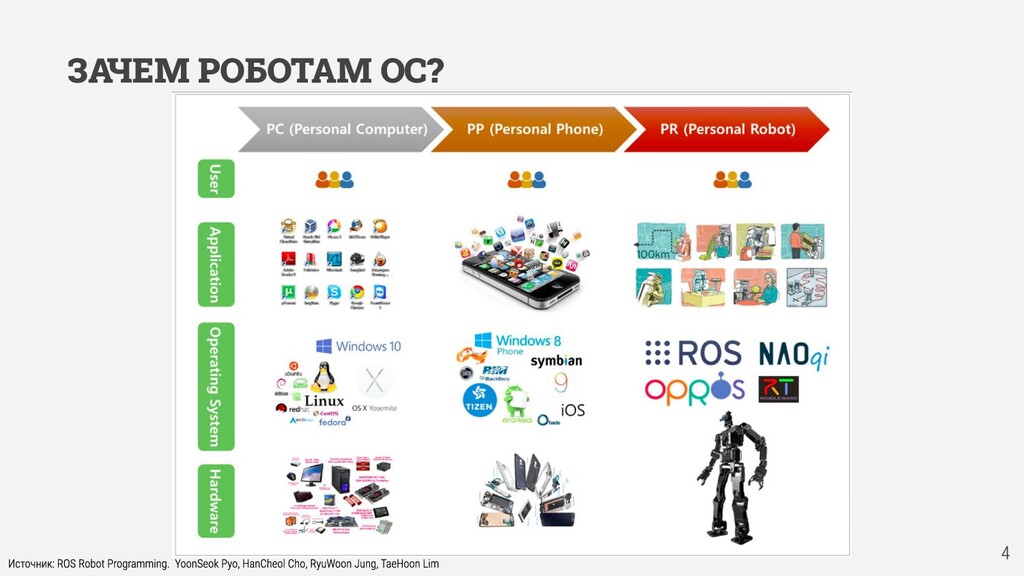
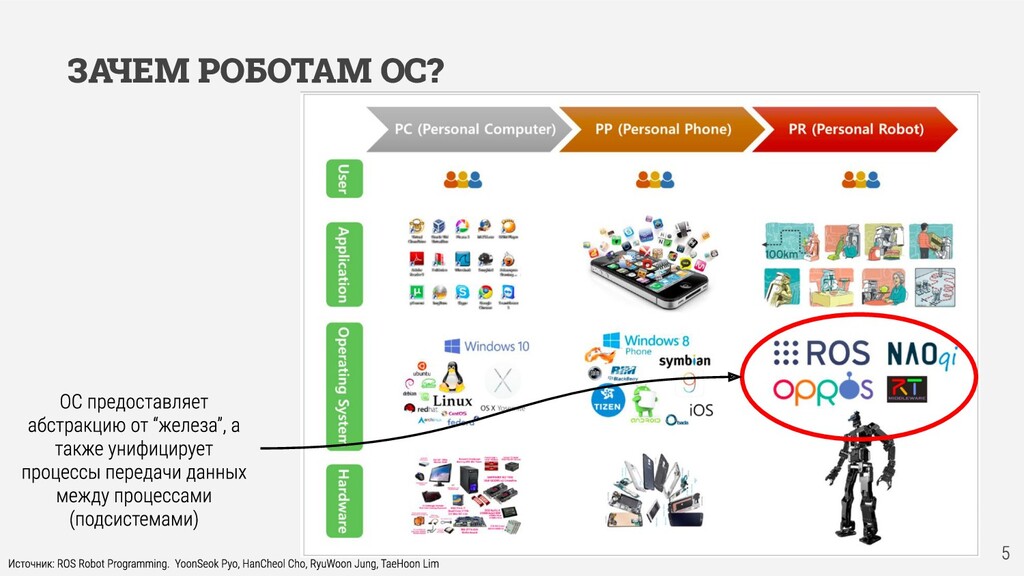
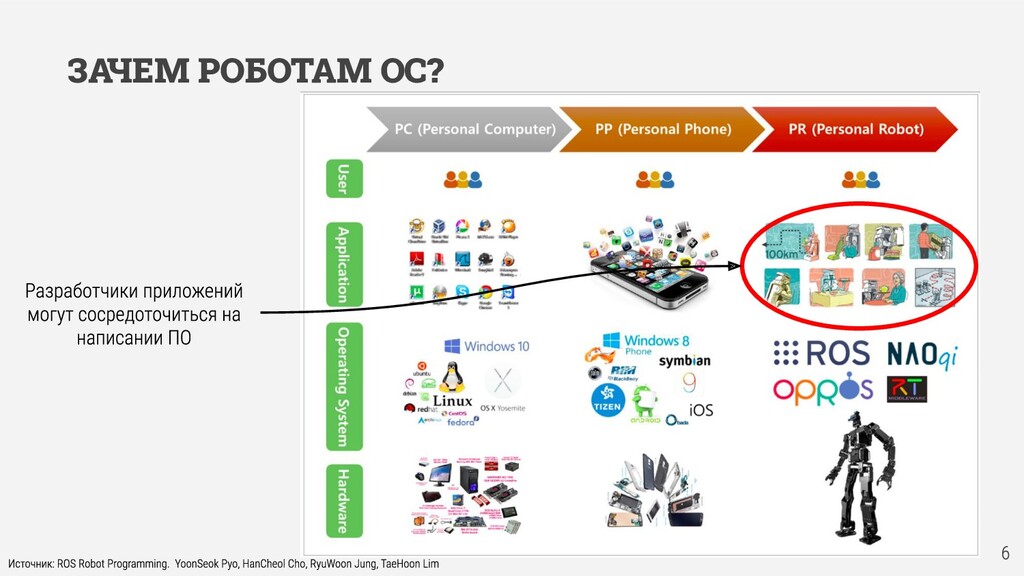
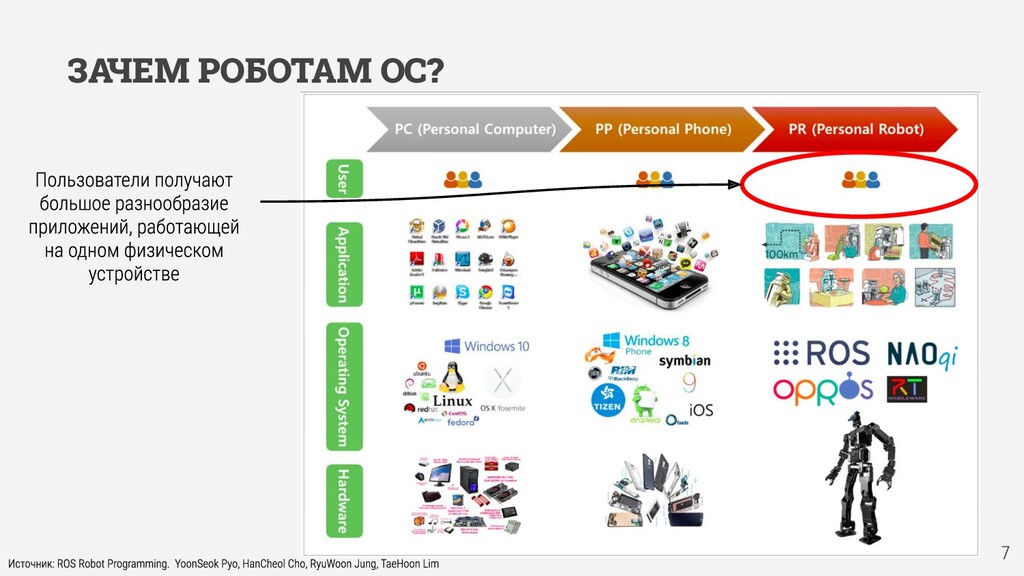
1. Зачем роботам операционная система?
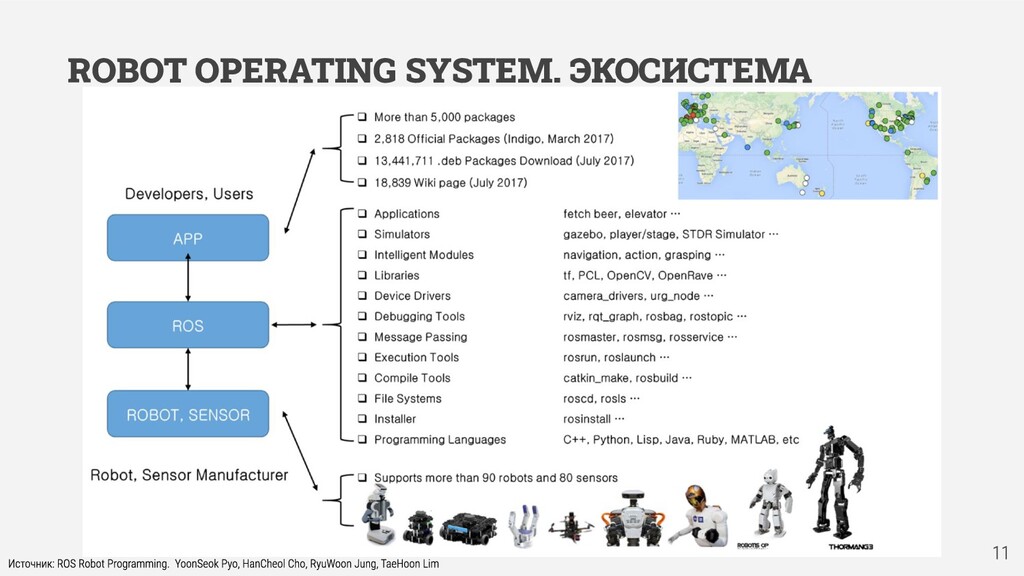
2. Что такое ROS?
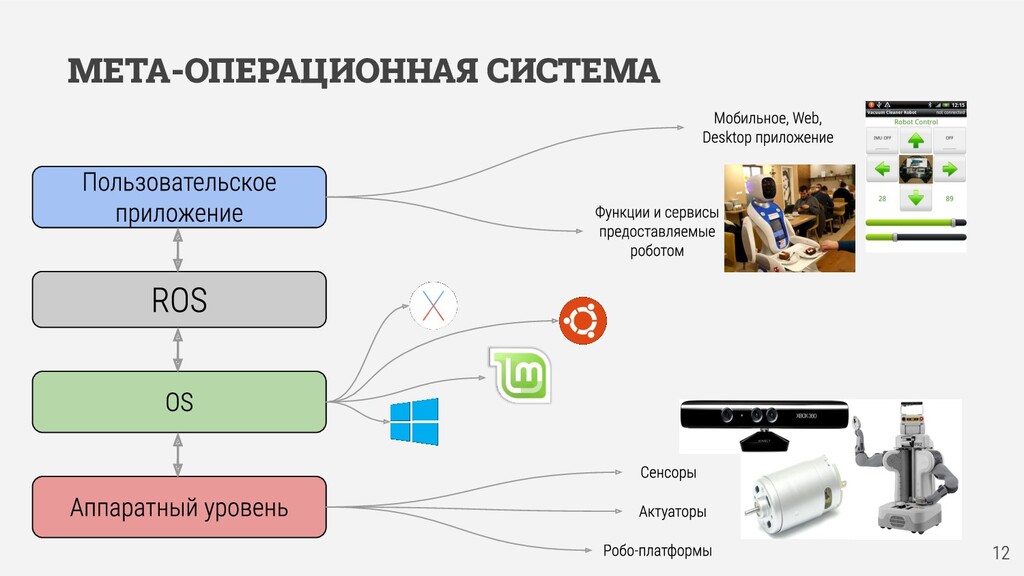
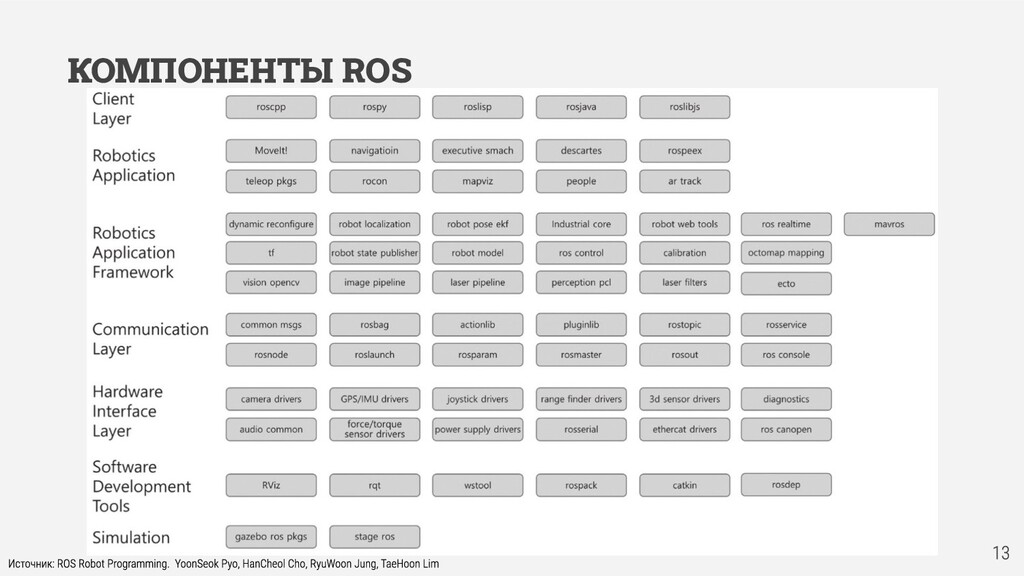
3. Место ROS в программировании роботов
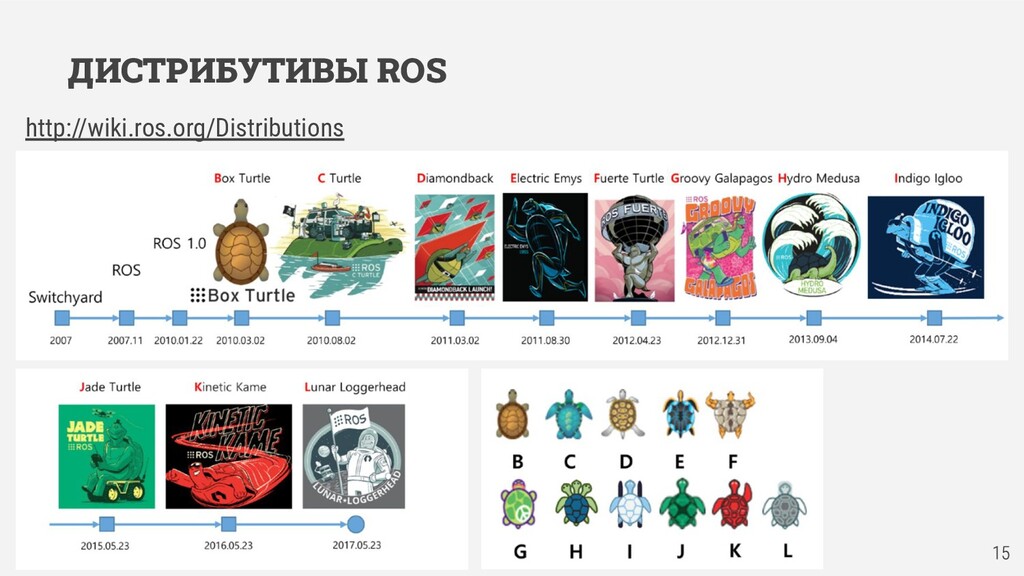
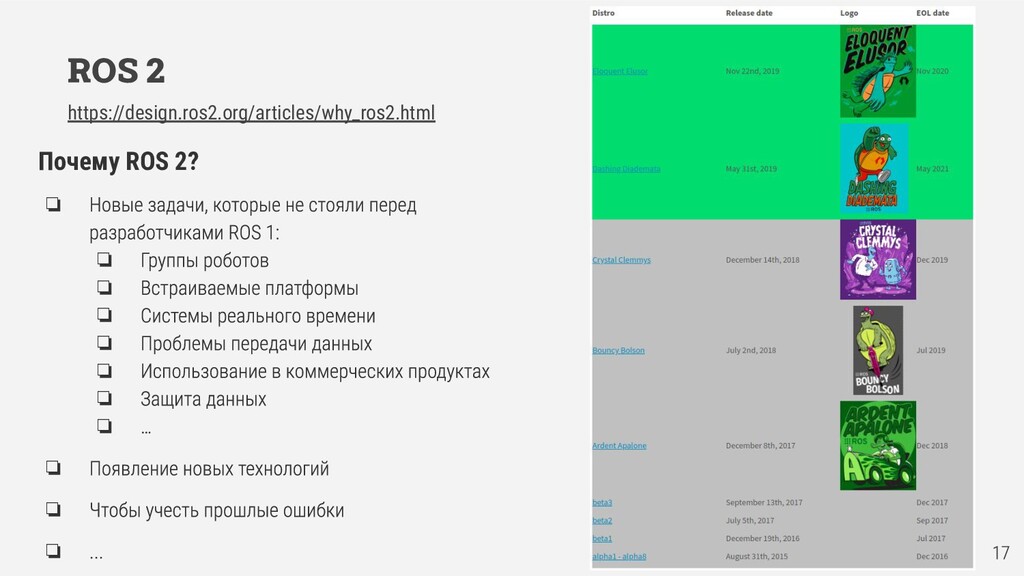
4. История создания и существующие дистрибутивы ROS
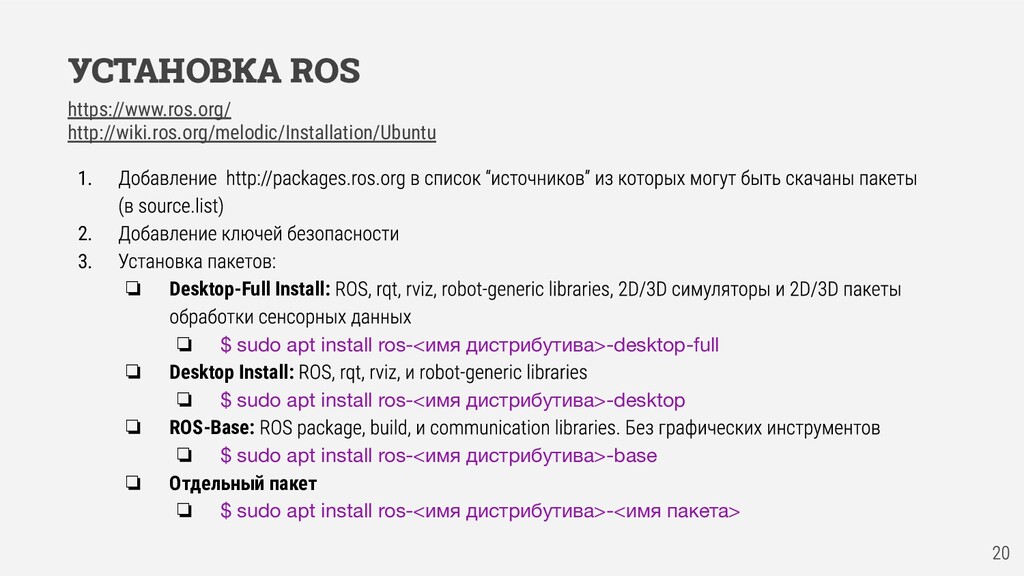
5. Установка ROS
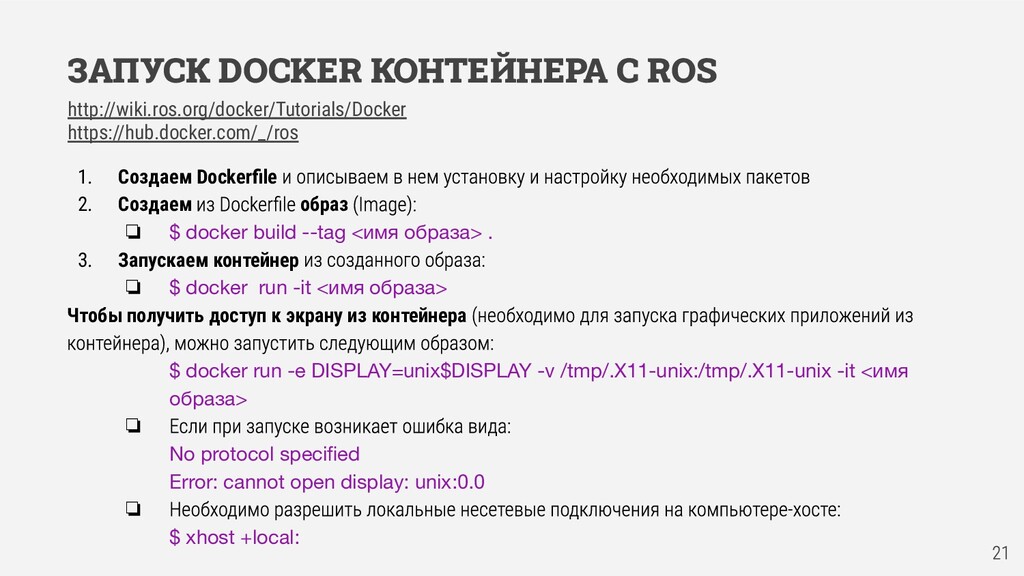
a. ROS из контейнера
6. Первый запуск ROS
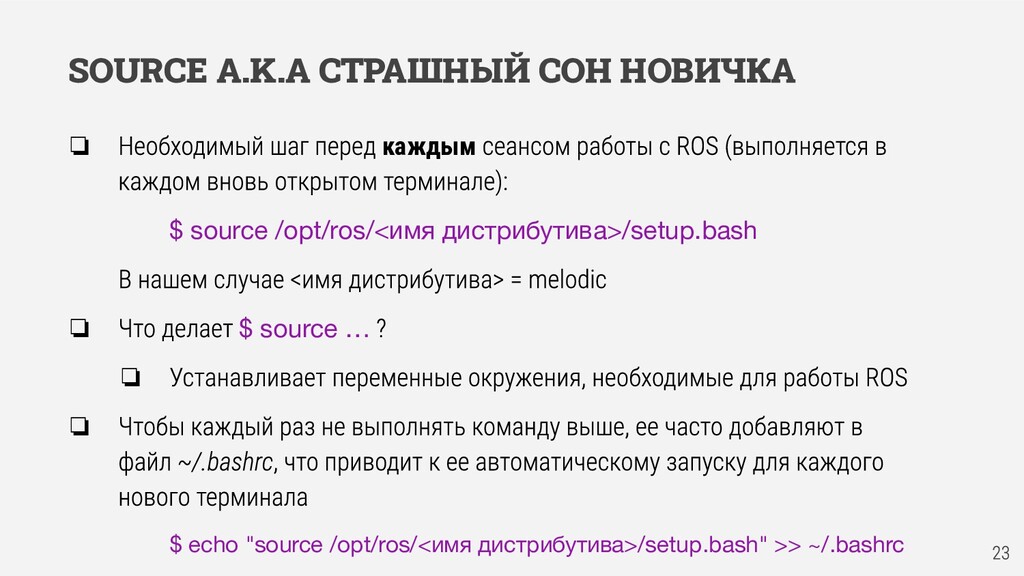
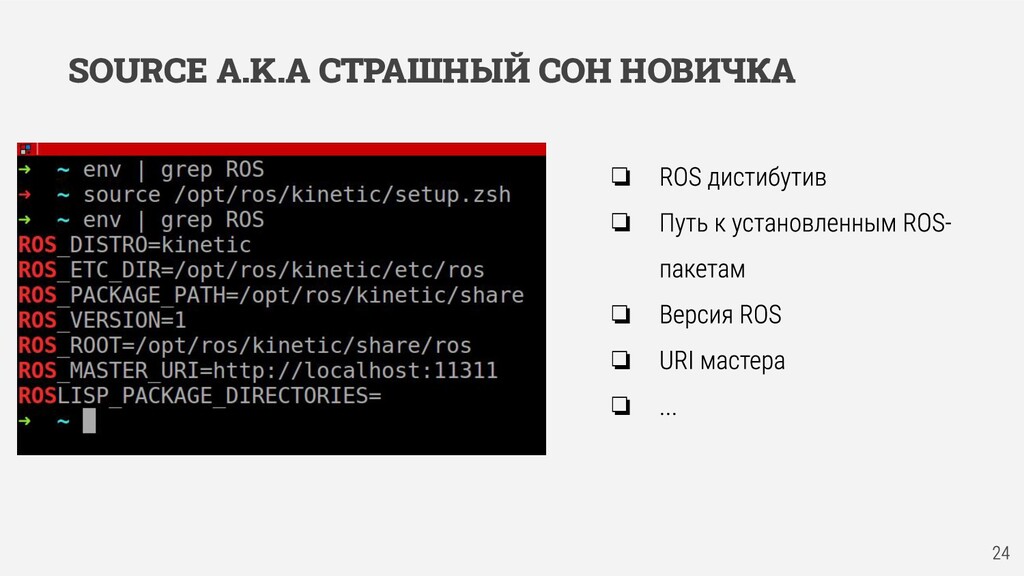
a. source...
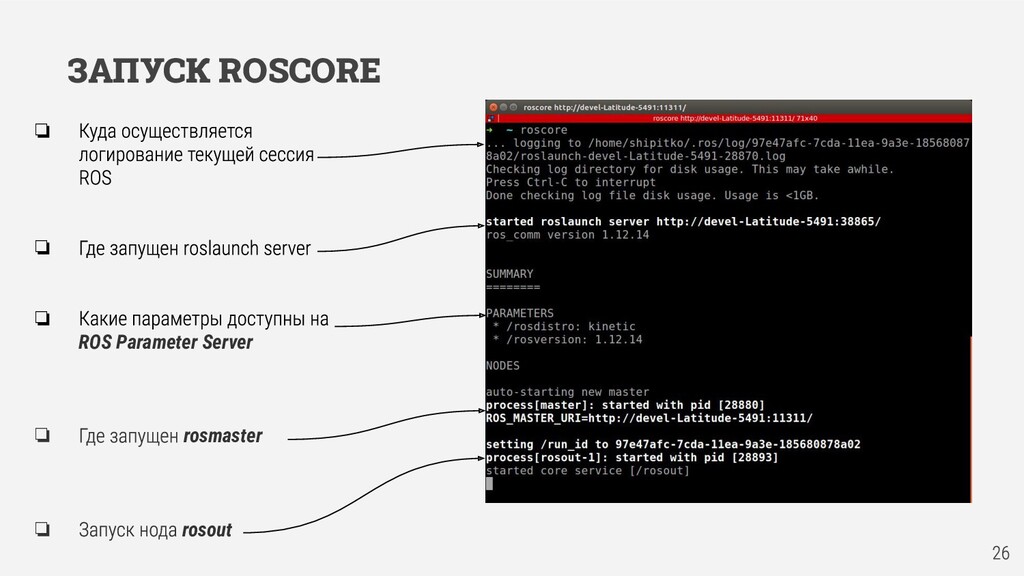
b. roscore
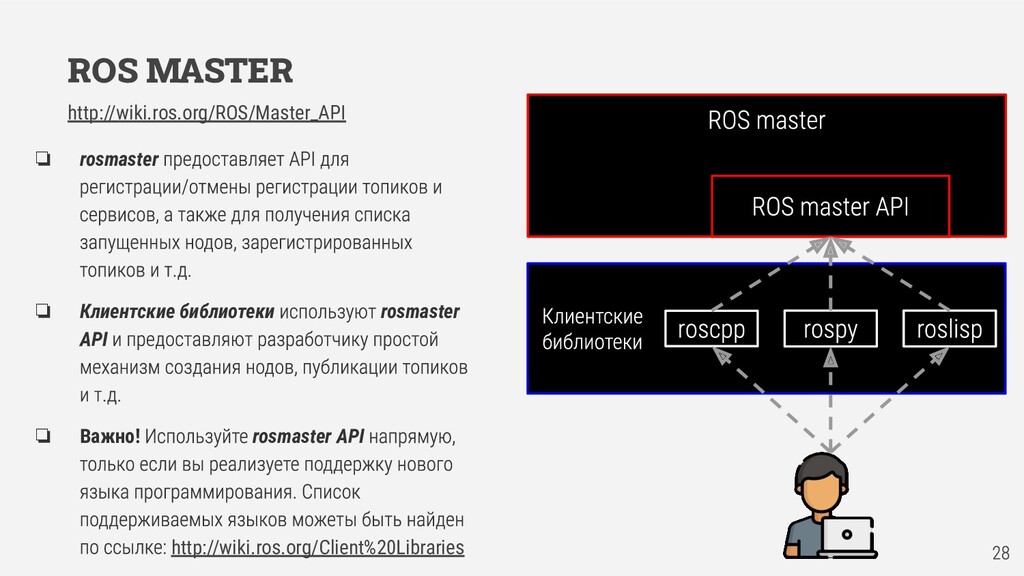
b.1. rosmaster
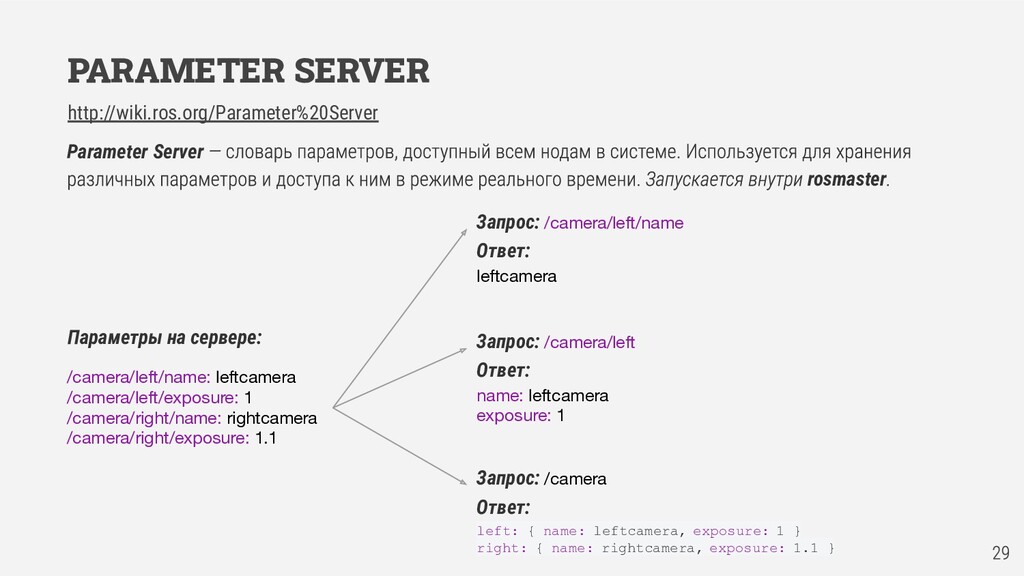
b.2. Parameter Server
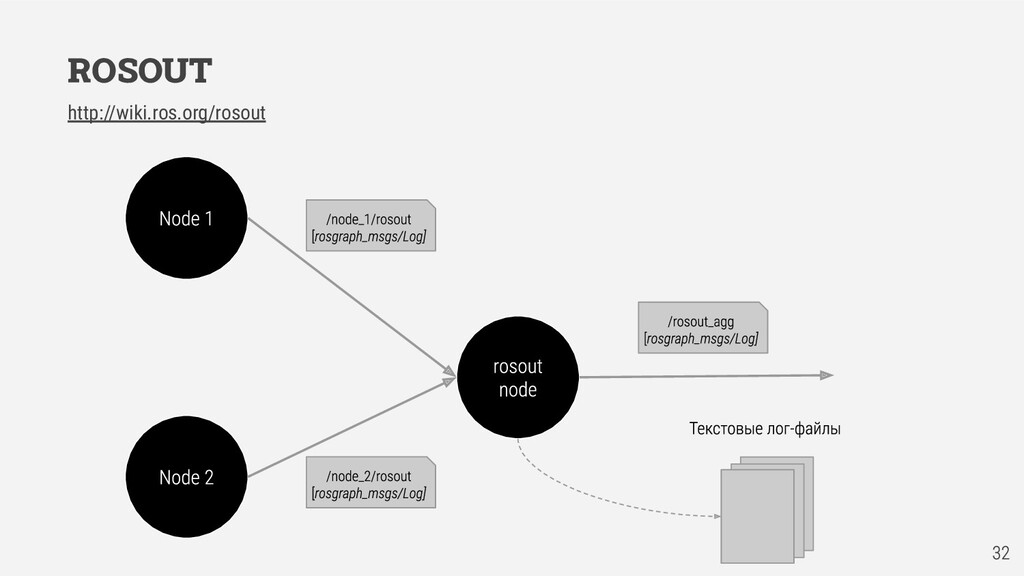
b.3. rosout
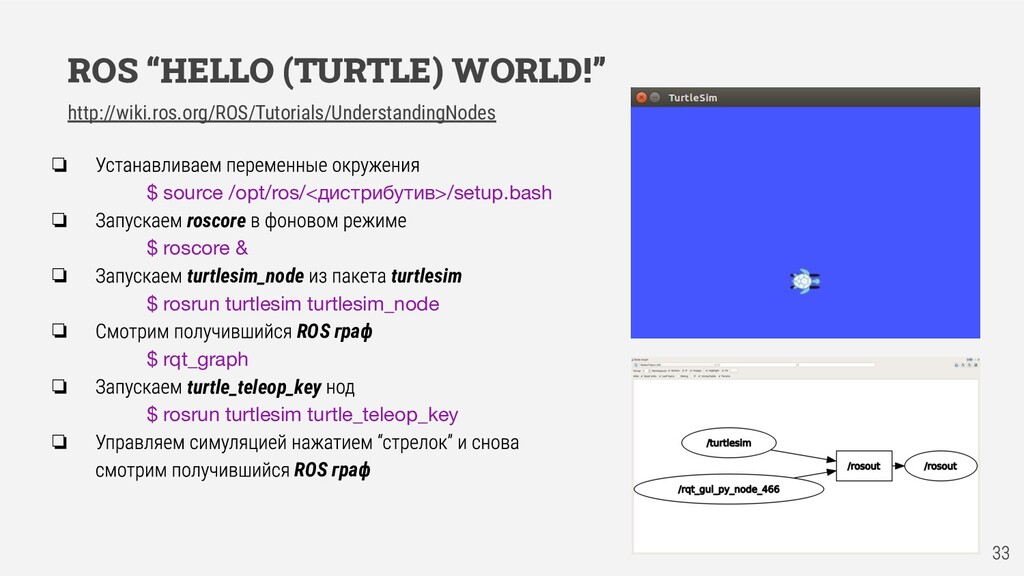
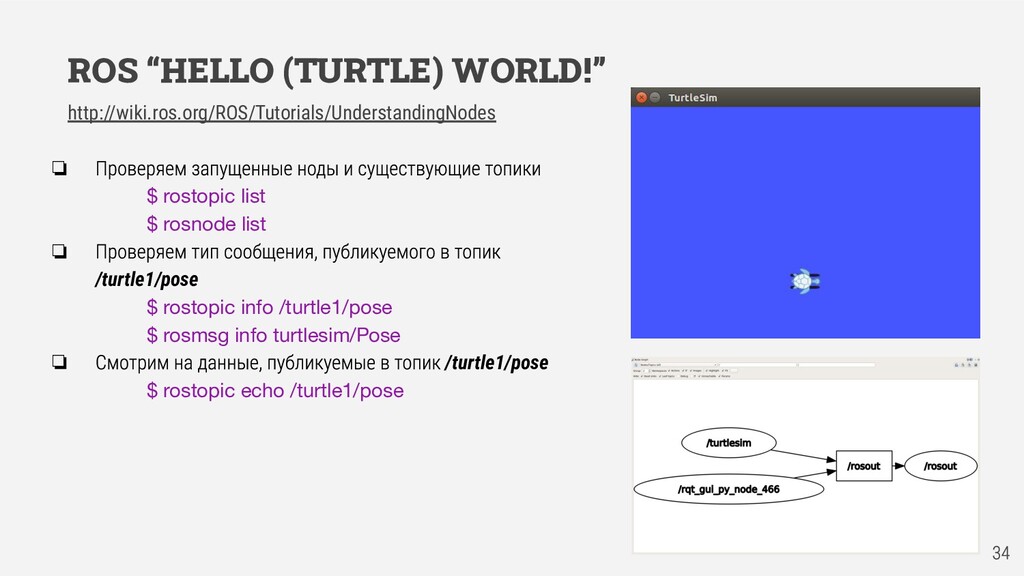
7. Демонстрация запуска готовых модулей на примере модуля turtlesim
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}