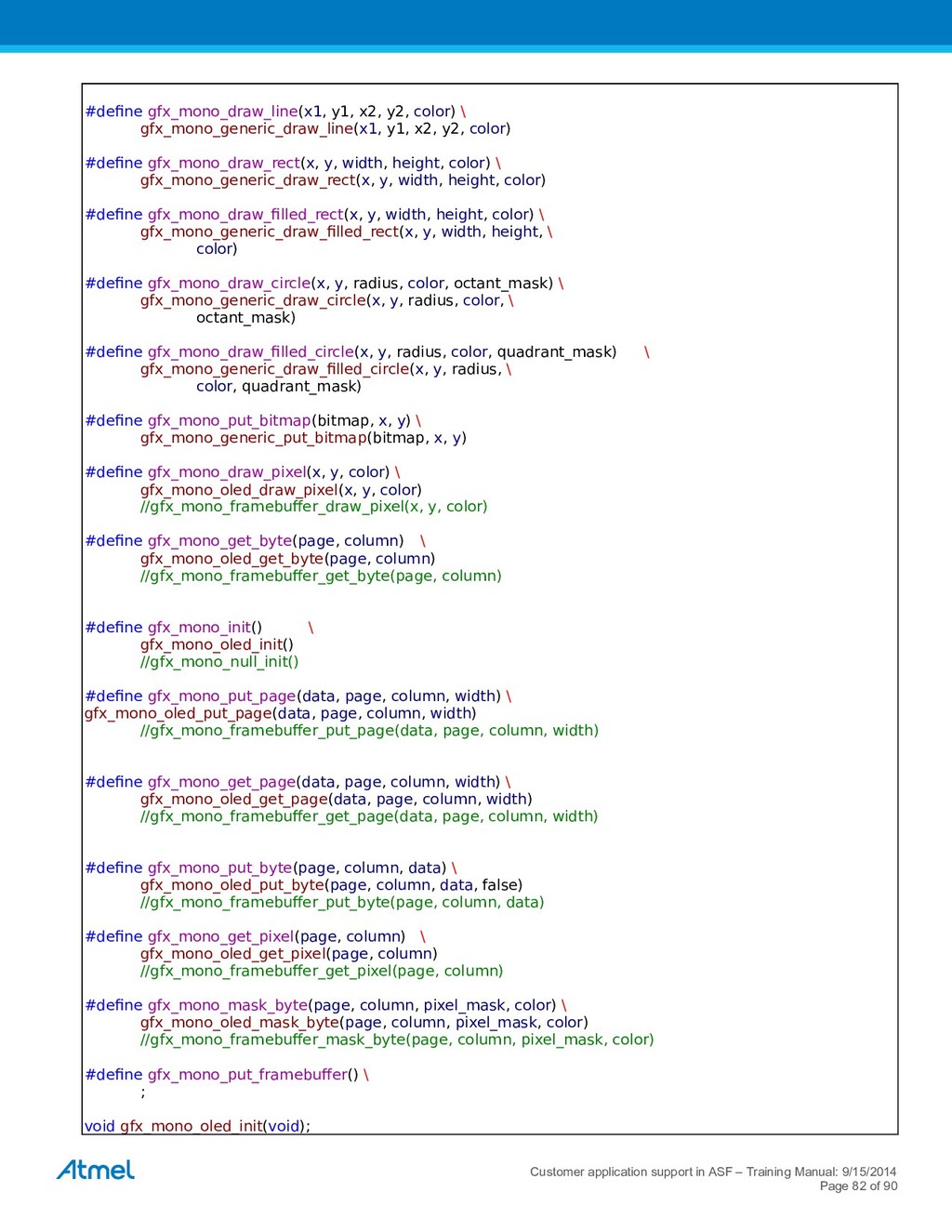
y2, color) #define gfx_mono_draw_rect(x, y, width, height, color) \ gfx_mono_generic_draw_rect(x, y, width, height, color) #define gfx_mono_draw_filled_rect(x, y, width, height, color) \ gfx_mono_generic_draw_filled_rect(x, y, width, height, \ color) #define gfx_mono_draw_circle(x, y, radius, color, octant_mask) \ gfx_mono_generic_draw_circle(x, y, radius, color, \ octant_mask) #define gfx_mono_draw_filled_circle(x, y, radius, color, quadrant_mask) \ gfx_mono_generic_draw_filled_circle(x, y, radius, \ color, quadrant_mask) #define gfx_mono_put_bitmap(bitmap, x, y) \ gfx_mono_generic_put_bitmap(bitmap, x, y) #define gfx_mono_draw_pixel(x, y, color) \ gfx_mono_oled_draw_pixel(x, y, color) //gfx_mono_framebuffer_draw_pixel(x, y, color) #define gfx_mono_get_byte(page, column) \ gfx_mono_oled_get_byte(page, column) //gfx_mono_framebuffer_get_byte(page, column) #define gfx_mono_init() \ gfx_mono_oled_init() //gfx_mono_null_init() #define gfx_mono_put_page(data, page, column, width) \ gfx_mono_oled_put_page(data, page, column, width) //gfx_mono_framebuffer_put_page(data, page, column, width) #define gfx_mono_get_page(data, page, column, width) \ gfx_mono_oled_get_page(data, page, column, width) //gfx_mono_framebuffer_get_page(data, page, column, width) #define gfx_mono_put_byte(page, column, data) \ gfx_mono_oled_put_byte(page, column, data, false) //gfx_mono_framebuffer_put_byte(page, column, data) #define gfx_mono_get_pixel(page, column) \ gfx_mono_oled_get_pixel(page, column) //gfx_mono_framebuffer_get_pixel(page, column) #define gfx_mono_mask_byte(page, column, pixel_mask, color) \ gfx_mono_oled_mask_byte(page, column, pixel_mask, color) //gfx_mono_framebuffer_mask_byte(page, column, pixel_mask, color) #define gfx_mono_put_framebuffer() \ ; void gfx_mono_oled_init(void); Customer application support in ASF – Training Manual: 9/15/2014 Page 82 of 90
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
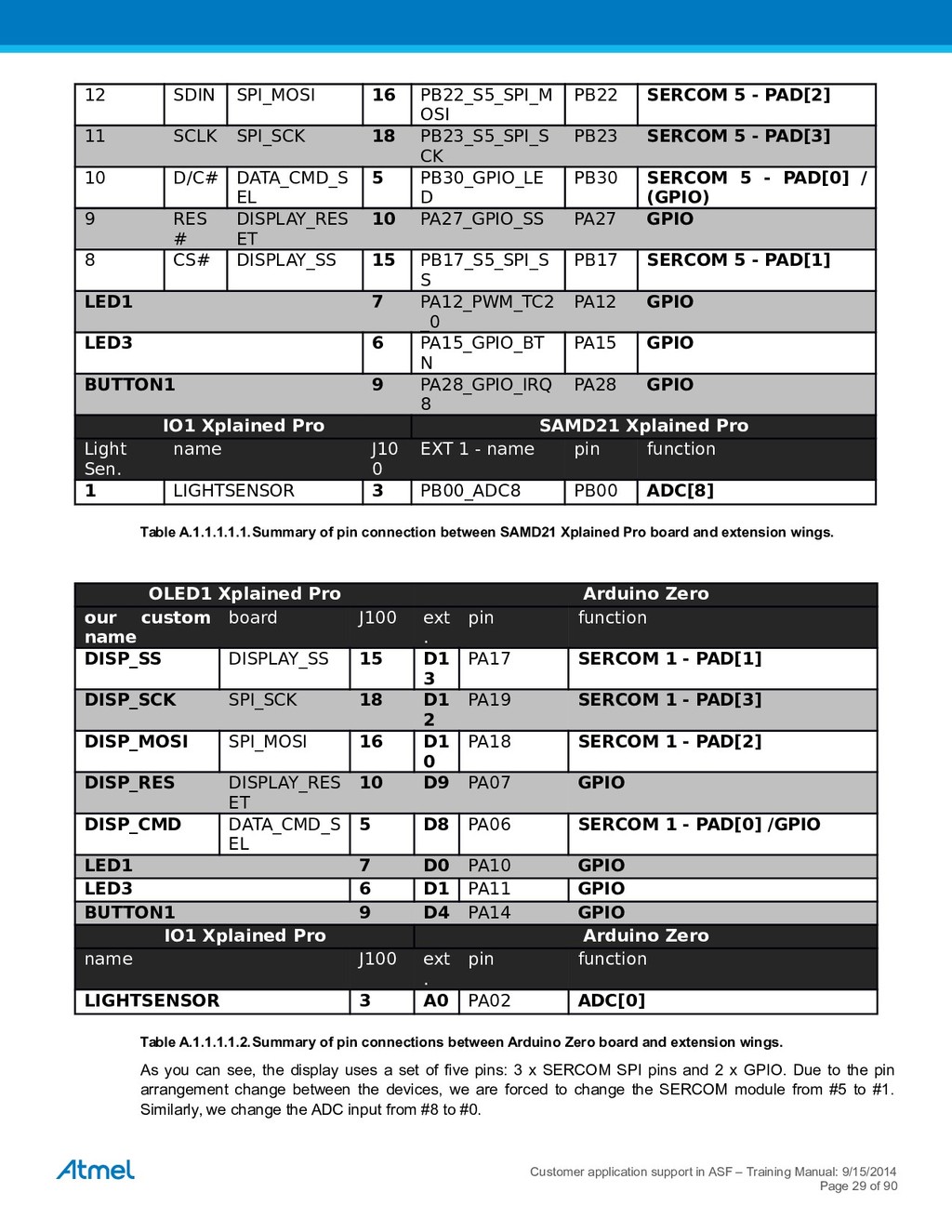
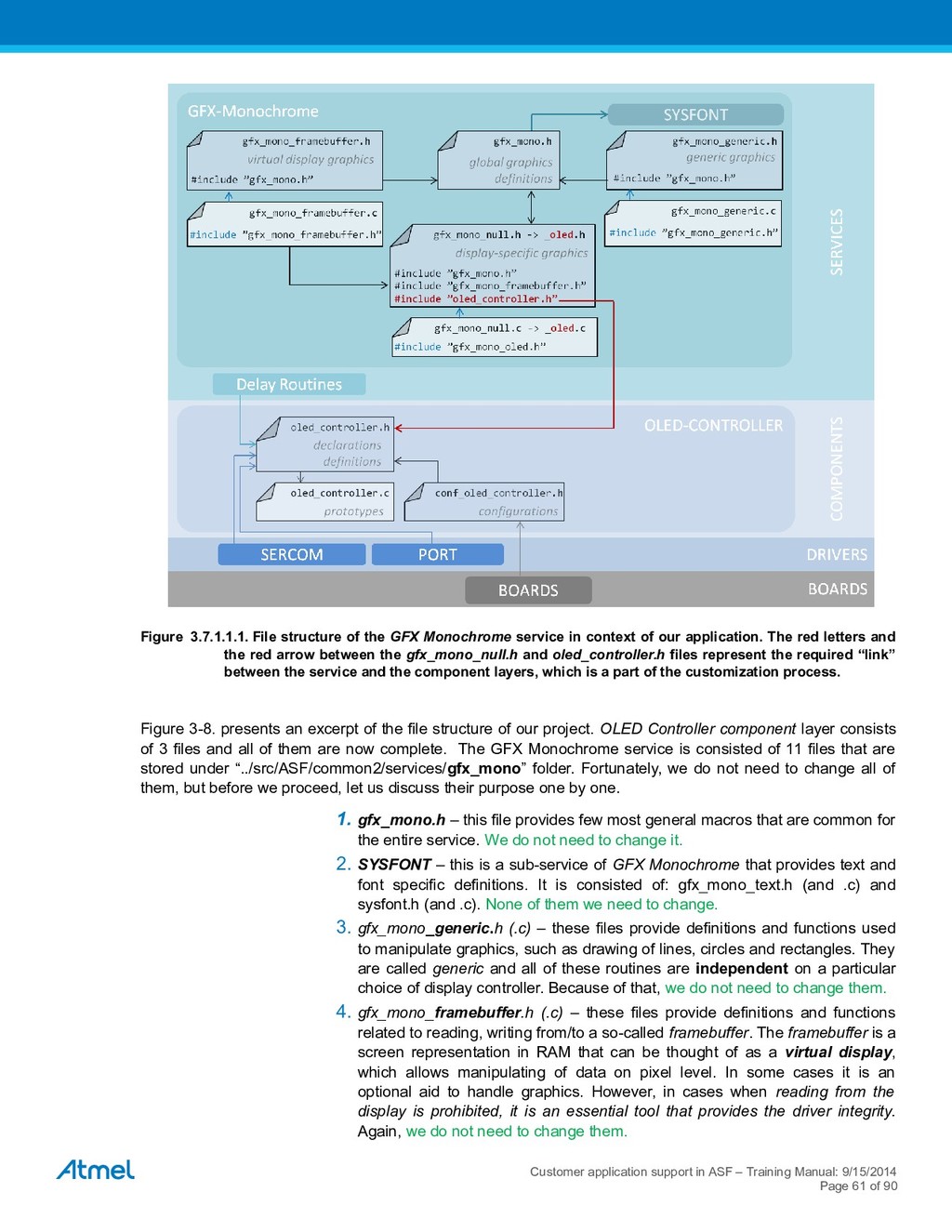
![ PAD[0] is MISO (Master-In Slave-Out) PAD[1] is ~SS](https://files.speakerdeck.com/presentations/05030069c018411aa47530422227bc5d/slide_35.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}