Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
OpenTalks.AI - Дмитрий Пагин, Fast cars detecti...
Search
OpenTalks.AI
February 21, 2020
Science
2.1k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
OpenTalks.AI - Дмитрий Пагин, Fast cars detection and traffic estimation
OpenTalks.AI
February 21, 2020
More Decks by OpenTalks.AI
See All by OpenTalks.AI
OpenTalks.AI - Виктор Лемпицкий, Моделирование 3Д сцен: новые подходы в 2020 году
opentalks
0
500
OpenTalks.AI - Алексей Чернявский, Нейросетевые алгоритмы для повышения качества медицинских изображений
opentalks
0
450
OpenTalks.AI - Александр Громов, Устойчивость нейросетевых моделей при анализе КТ/НДКТ-исследований
opentalks
0
390
OpenTalks.AI - Денис Тимонин, Megatron-LM: Обучение мультимиллиардных LMs при помощи техники Model Parallelism
opentalks
0
540
OpenTalks.AI - Егор Филимонов, Возможности платформы Huawei Atlas и эффективный гетерогенный инференс.
opentalks
0
170
OpenTalks.AI - Александр Прозоров, Референсная архитектура робота сервисного центра в отраслях с изменчивыми бизнес-процессами
opentalks
0
400
OpenTalks.AI - Наталья Лукашевич, Анализ тональности по отношению к компании — с чем не справился BERT
opentalks
0
350
OpenTalks.AI - Константин Воронцов, Фейковые новости и другие типы потенциально опасного дискурса: типология, подходы, датасеты, соревнования
opentalks
0
460
OpenTalks.AI - Дмитрий Ветров, Фрактальность функции потерь, эффект двойного спуска и степенные законы в глубинном обучении - фрагменты одной мозаики
opentalks
0
490
Other Decks in Science
See All in Science
あなたに水耕栽培を愛していないとは言わせない
mutsumix
1
360
Wet Active Matter
rajeshrinet
0
120
機械学習 - ニューラルネットワーク入門
trycycle
PRO
0
1.1k
AI bij literatuuronderzoek in de wetenschap
voginip
0
220
20260410_SystemsThinking
takusamar
1
120
[第67回 CV勉強会@関東] CV × Scientific Figures / kantoCV 67th CVPR 2026
lychee1223
0
140
SpatialRDDパッケージによる空間回帰不連続デザイン
saltcooky12
0
270
大黒市で発生した大規模インシデント の ポストモーテムから読み解く、 記憶媒体消去の大切さ
shucho0103
0
210
機械学習 - K近傍法 & 機械学習のお作法
trycycle
PRO
1
1.6k
データベース12: 正規化(2/2) - データ従属性に基づく正規化
trycycle
PRO
0
1.4k
チュートリアル:世界モデル
hf149
0
1.9k
Tensor Factorization Meets Deformed Information Geometry: Convex Relaxation under Deformed Algebra
gkazunii
0
120
Featured
See All Featured
HU Berlin: Industrial-Strength Natural Language Processing with spaCy and Prodigy
inesmontani
PRO
0
550
Statistics for Hackers
jakevdp
799
230k
Discover your Explorer Soul
emna__ayadi
2
1.2k
Leveraging LLMs for student feedback in introductory data science courses - posit::conf(2025)
minecr
1
320
HTML-Aware ERB: The Path to Reactive Rendering @ RubyCon 2026, Rimini, Italy
marcoroth
3
350
How Software Deployment tools have changed in the past 20 years
geshan
0
34k
Jess Joyce - The Pitfalls of Following Frameworks
techseoconnect
PRO
1
310
Put a Button on it: Removing Barriers to Going Fast.
kastner
60
4.4k
The Success of Rails: Ensuring Growth for the Next 100 Years
eileencodes
47
8.2k
The World Runs on Bad Software
bkeepers
PRO
72
12k
Performance Is Good for Brains [We Love Speed 2024]
tammyeverts
12
1.7k
Distributed Sagas: A Protocol for Coordinating Microservices
caitiem20
333
23k
Transcript
Fast cars detection and traffic estimation Dmitriy Pagin, ML and
CV developer
Task Road traffic analysis in Russia is manual. It takes
more than 8 hours for 15 minutes video today
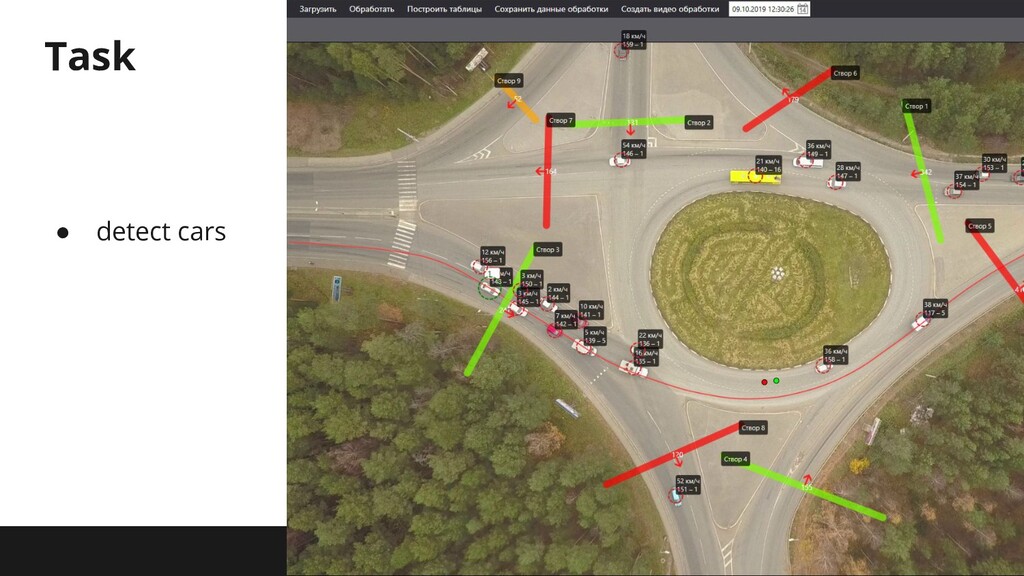
Task • detect cars
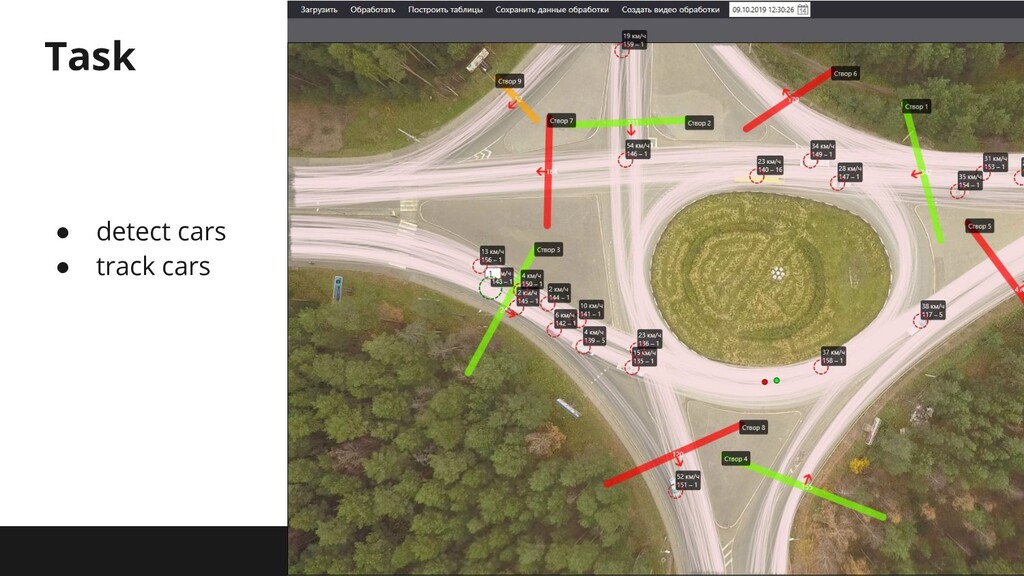
Task • detect cars • track cars
Baseline - people tracking
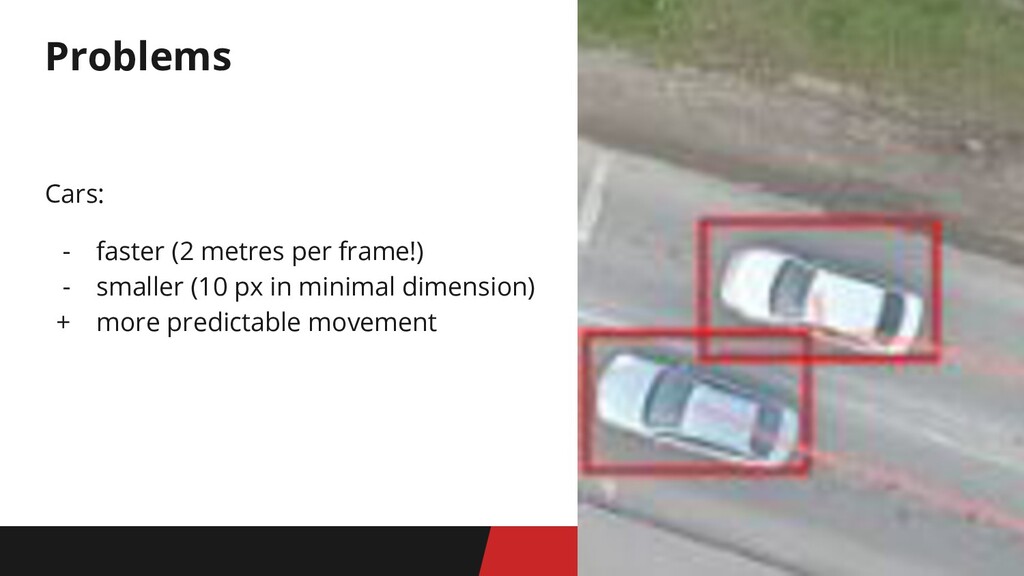
Problems Cars: - faster (2 metres per frame!) - smaller
(10 px in minimal dimension) + more predictable movement
YOLOv2 - blinking - problems on small cars - problems
on edges
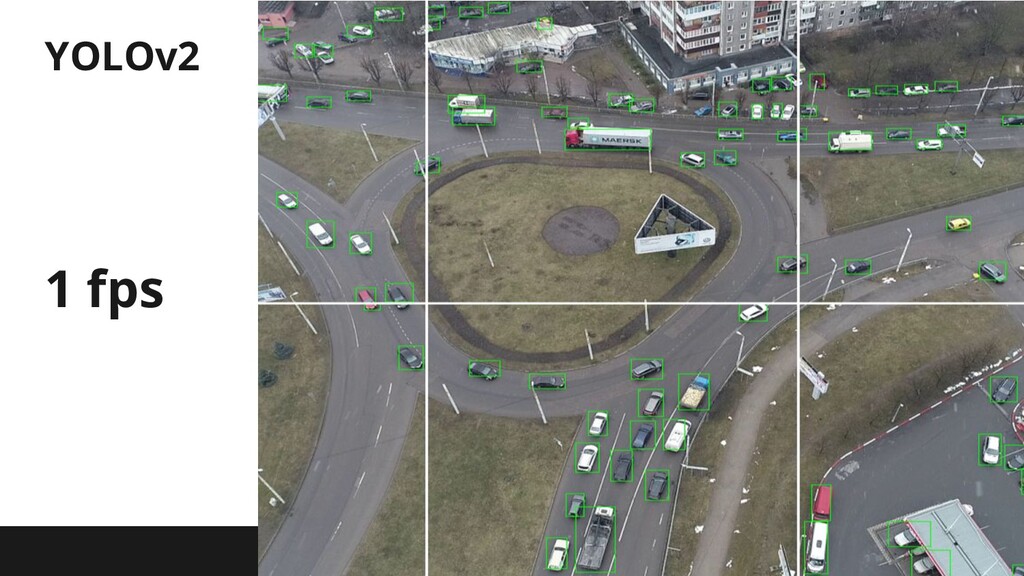
YOLOv2 1 fps
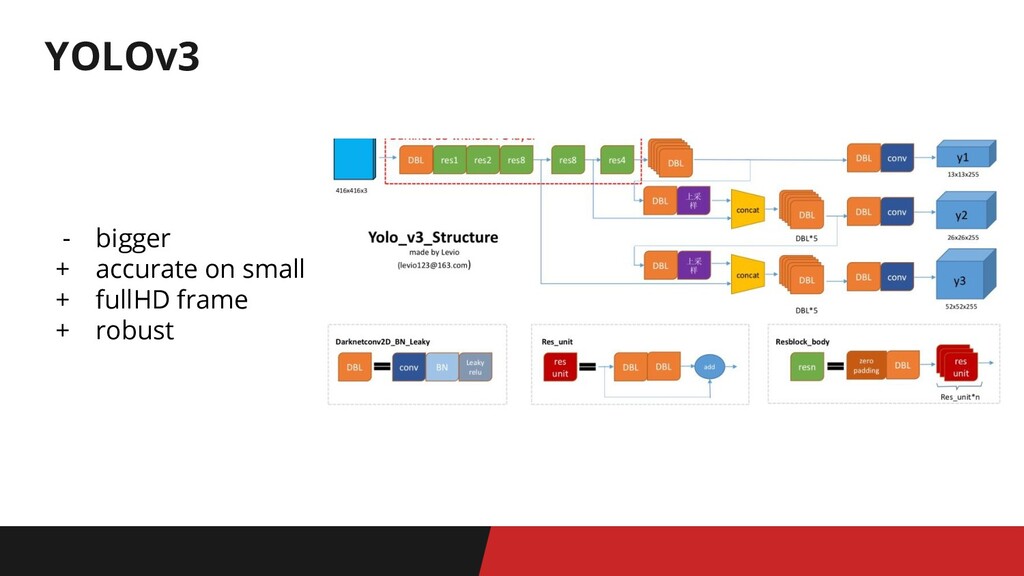
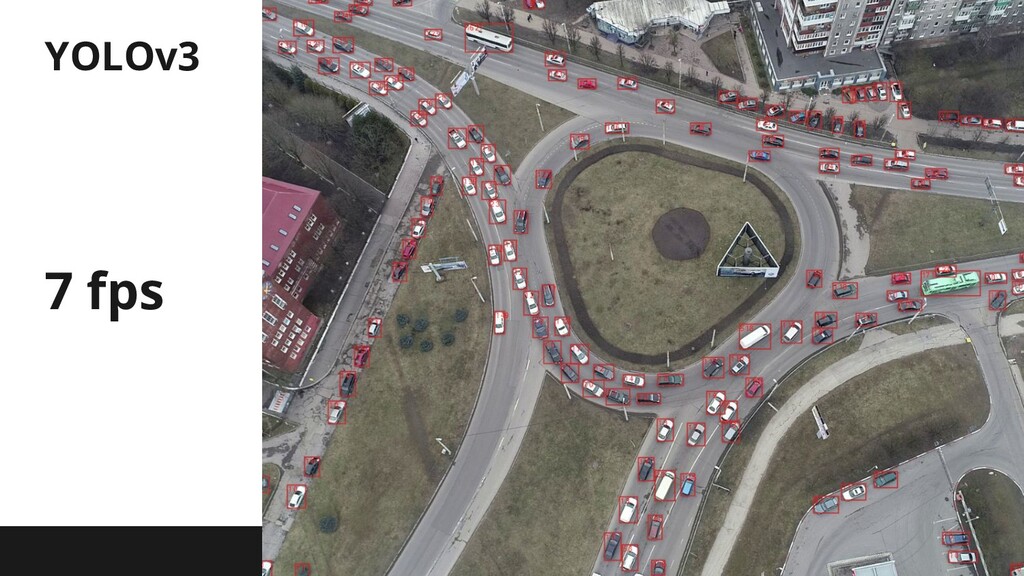
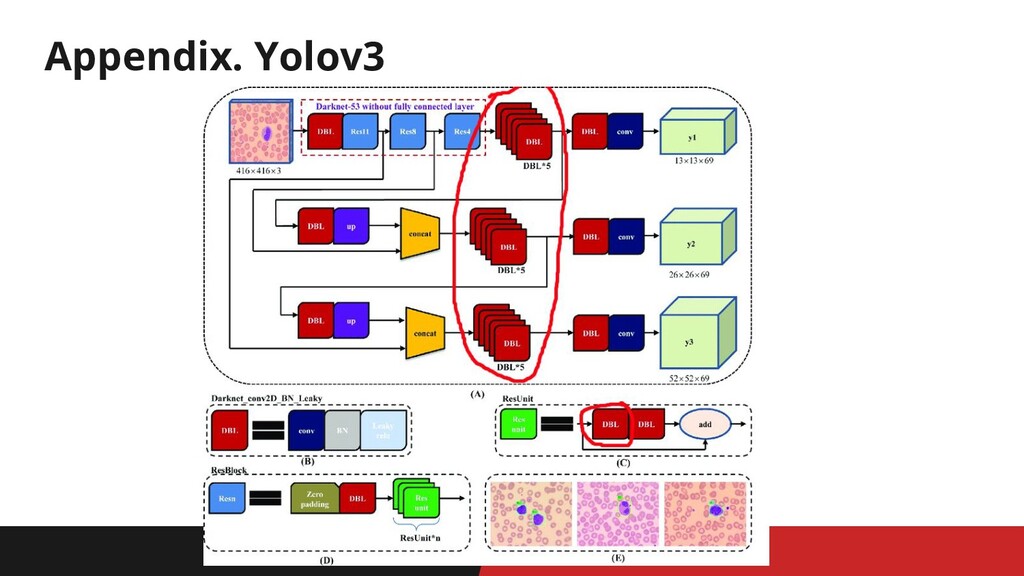
YOLOv3 - bigger + accurate on small + fullHD frame
+ robust
YOLOv3 7 fps
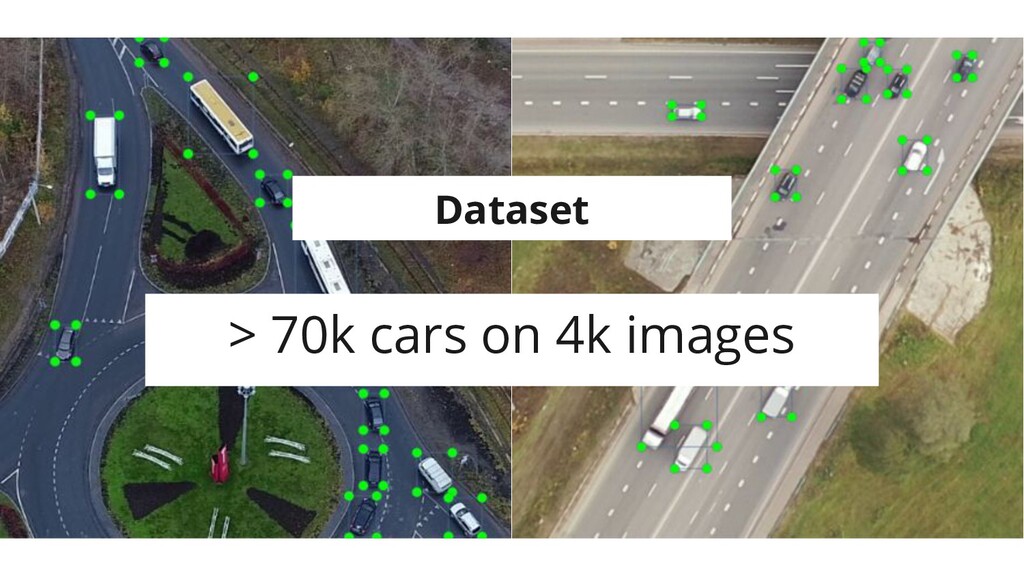
> 70k cars on 4k images Dataset
better than 1024x1024x1 Learning and Fine-tuning - 608x608 px -
batchSize = 3 - custom augmenters
None
Learning and Fine-tuning - 608x608 px - batchSize = 3
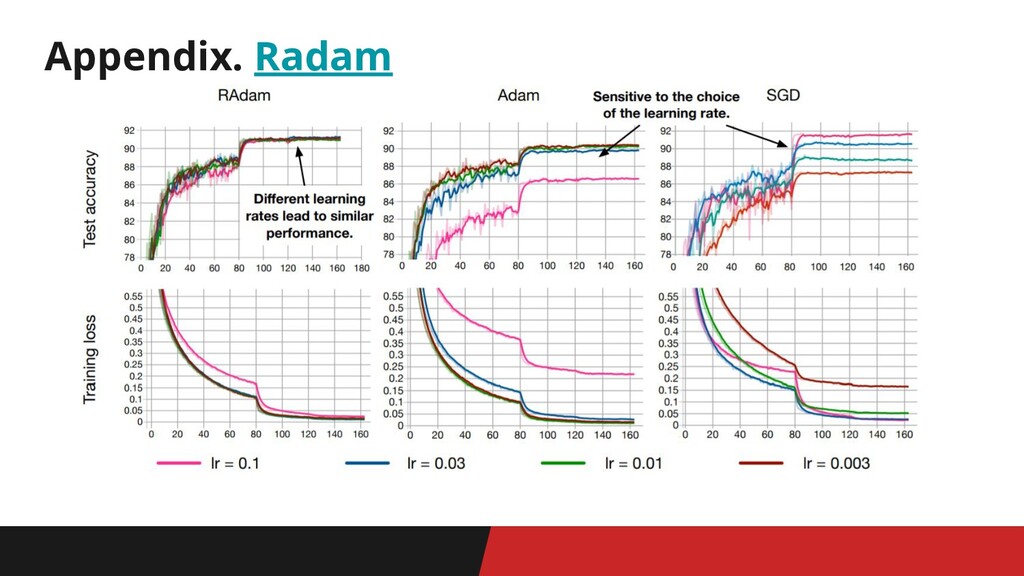
- custom augmenters - Radam optimizer (instead warmup + reduce LR) - Hard negative mining for trucks
Learning and Fine-tuning - 608x608 px - batchSize = 3
- custom augmenters - Radam optimizer (instead warmup + reduce LR) - Hard negative mining for trucks mAP75 = 0.96
Baseline Inference Speed 7 fps
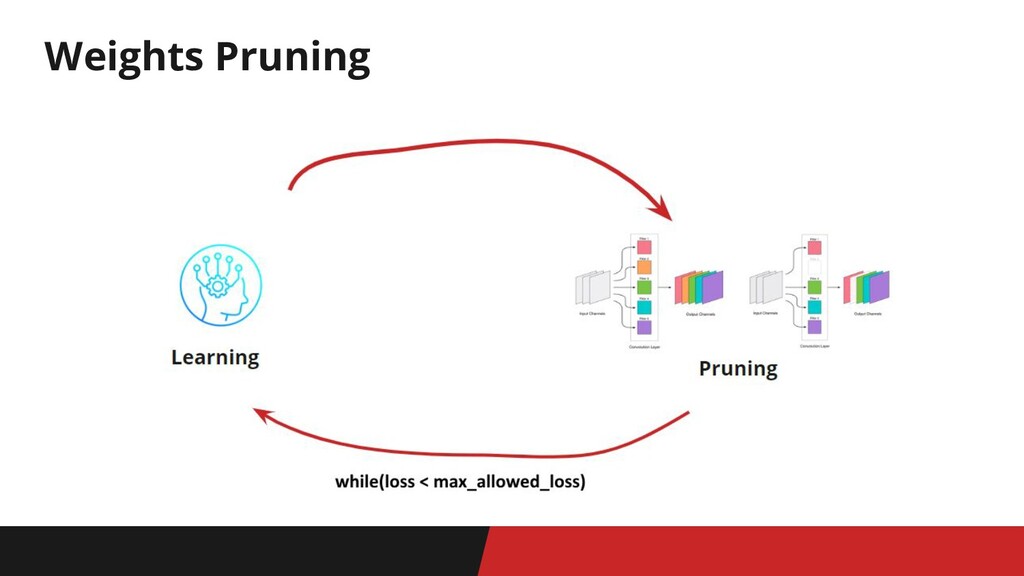
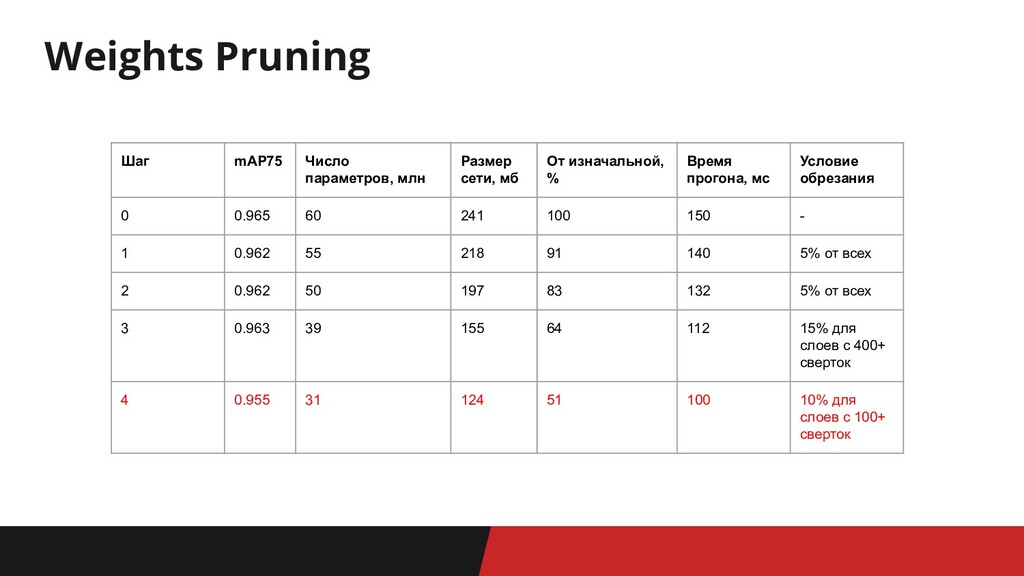
Weights Pruning
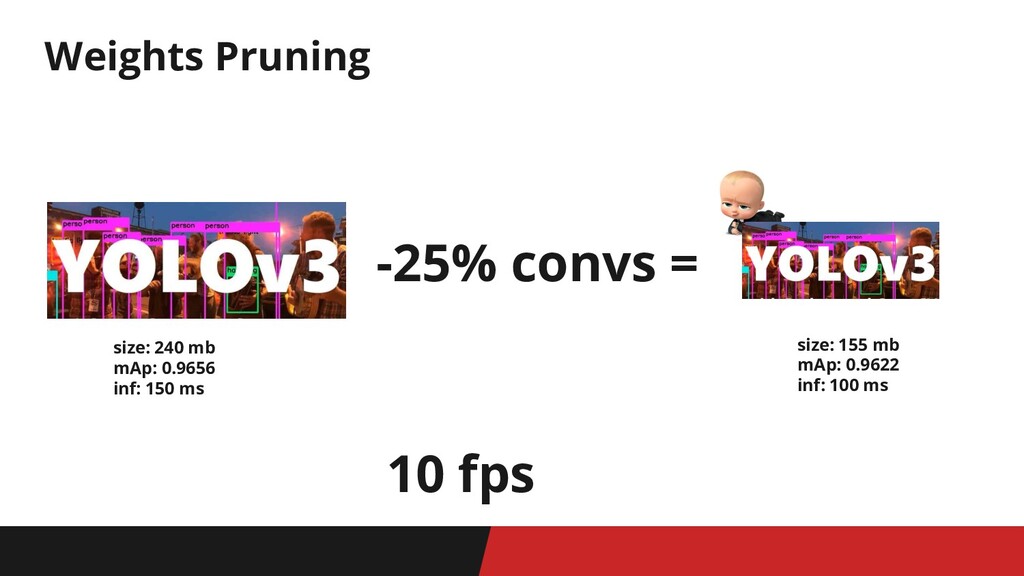
Weights Pruning -25% convs = size: 240 mb mAp: 0.9656
inf: 150 ms size: 155 mb mAp: 0.9622 inf: 100 ms 10 fps
OpticalFlow step or classical cv is alive ! - find
good features to track - calculate sparse optical flow
OpticalFlow step 19 fps Calculation doesnt work for 3 consistent
frames
Speed extrapolation step - estimate speed as pixels/frame - extrapolate
next position 28 fps
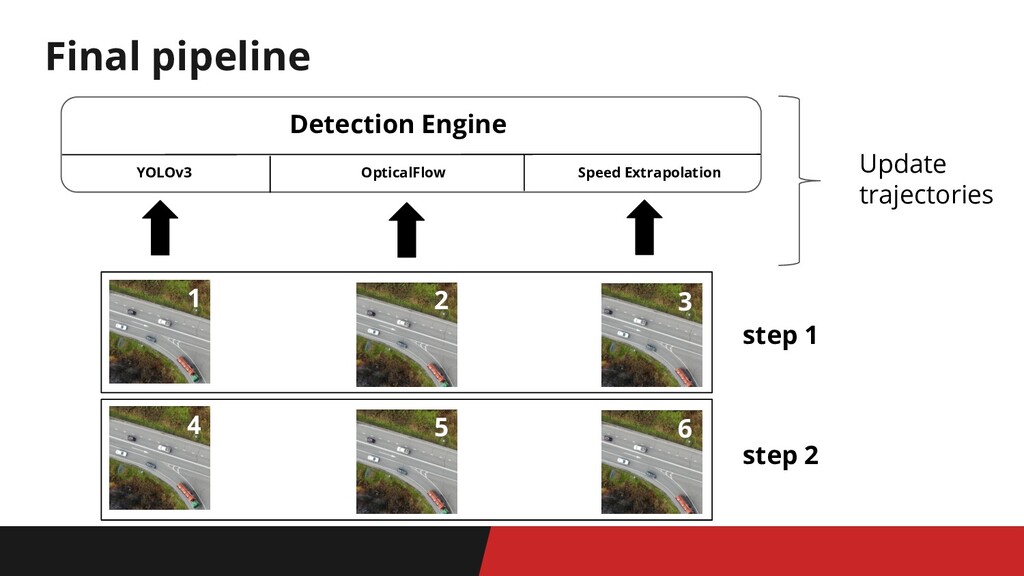
Final pipeline 1 2 3 4 5 6 Update trajectories
4 5 6 step 1 step 2 Speed Extrapolation OpticalFlow YOLOv3 Detection Engine
1 fps -> 28 fps on FULLHD
Tracking - IoU - Color descriptor (it’s enough!)
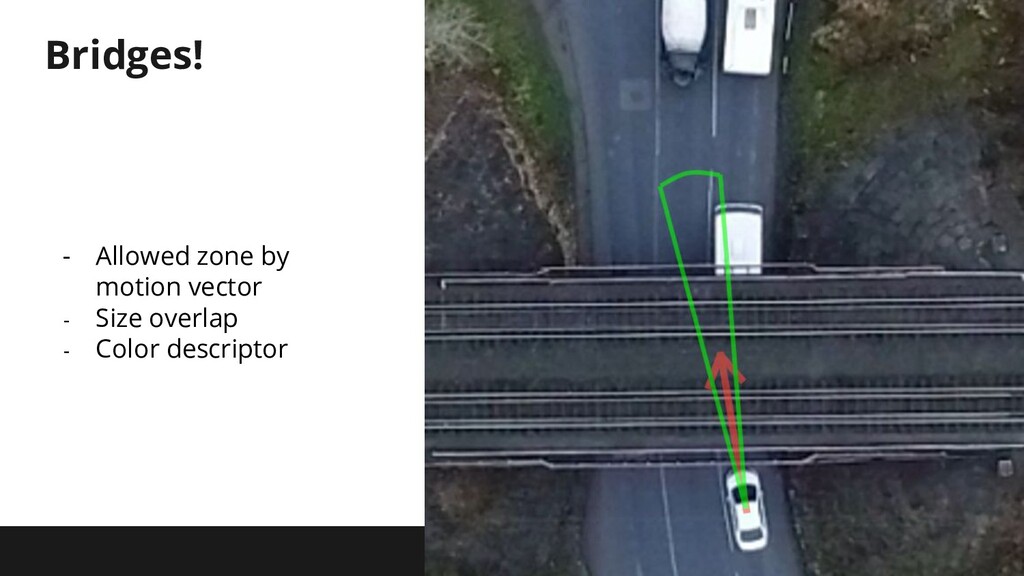
Bridges! - Allowed zone by motion vector - Size overlap
- Color descriptor
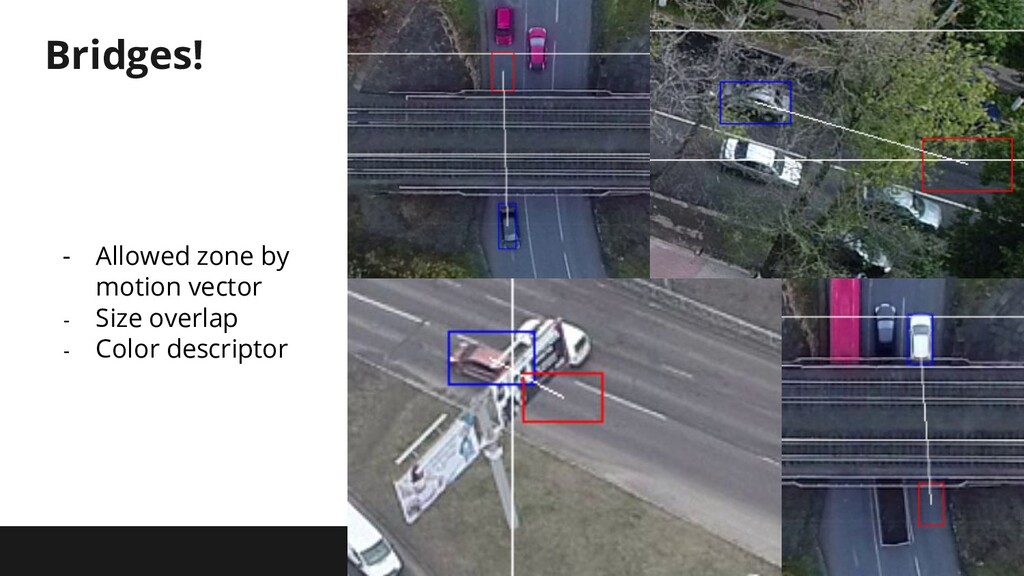
Bridges! - Allowed zone by motion vector - Size overlap
- Color descriptor
Thanks! Questions?
[email protected]
+7 952 335 65 70
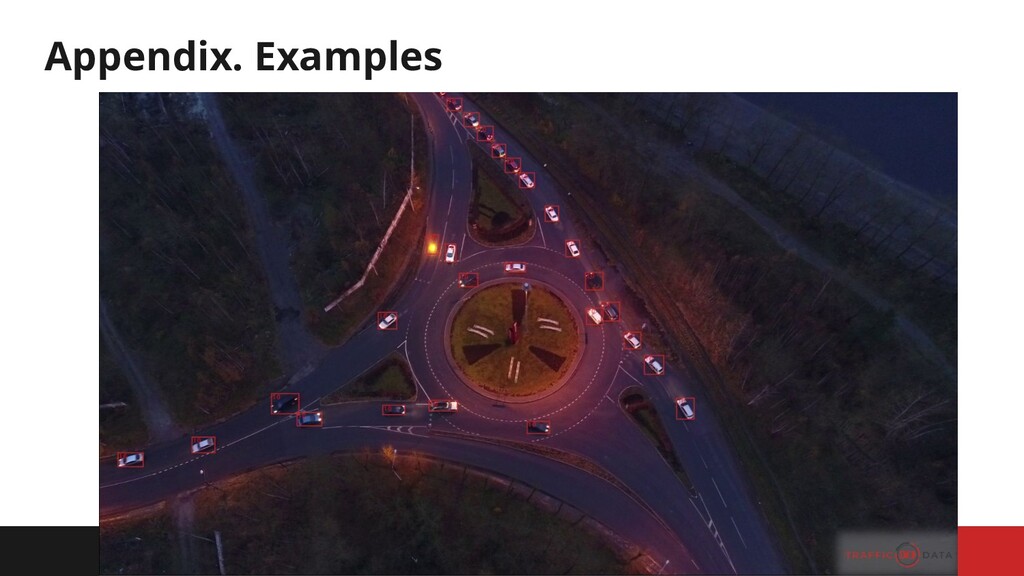
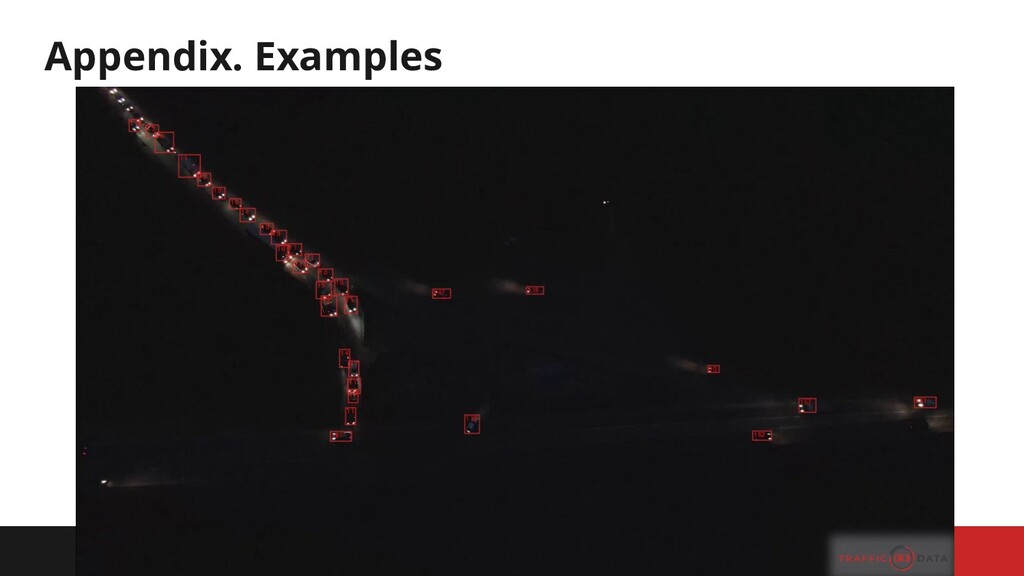
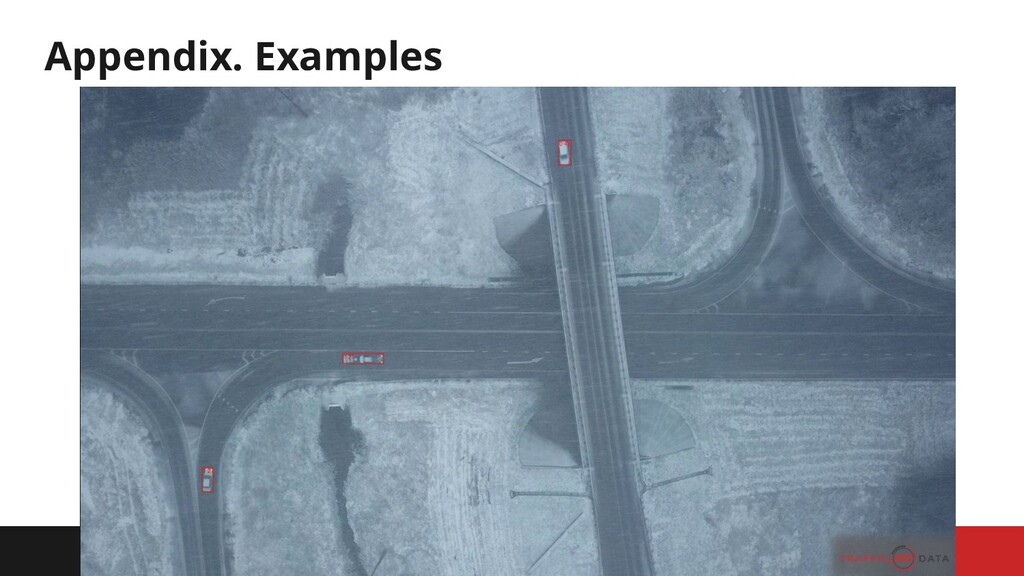
Appendix. Examples
Appendix. Examples
Appendix. Examples
Appendix. Yolov3
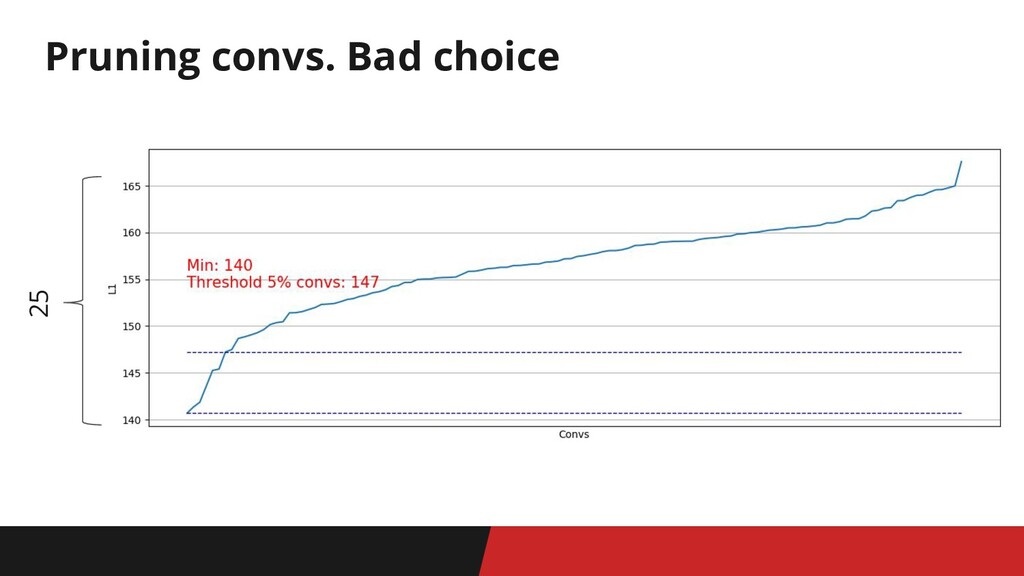
Weights Pruning Шаг mAP75 Число параметров, млн Размер сети, мб
От изначальной, % Время прогона, мс Условие обрезания 0 0.965 60 241 100 150 - 1 0.962 55 218 91 140 5% от всех 2 0.962 50 197 83 132 5% от всех 3 0.963 39 155 64 112 15% для слоев с 400+ сверток 4 0.955 31 124 51 100 10% для слоев с 100+ сверток
Appendix. Radam
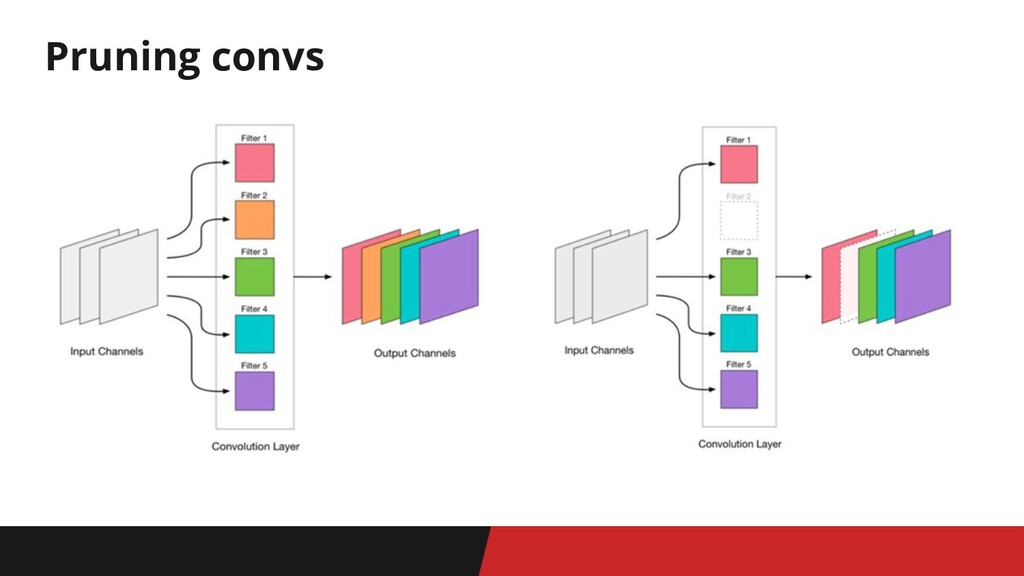
Pruning convs
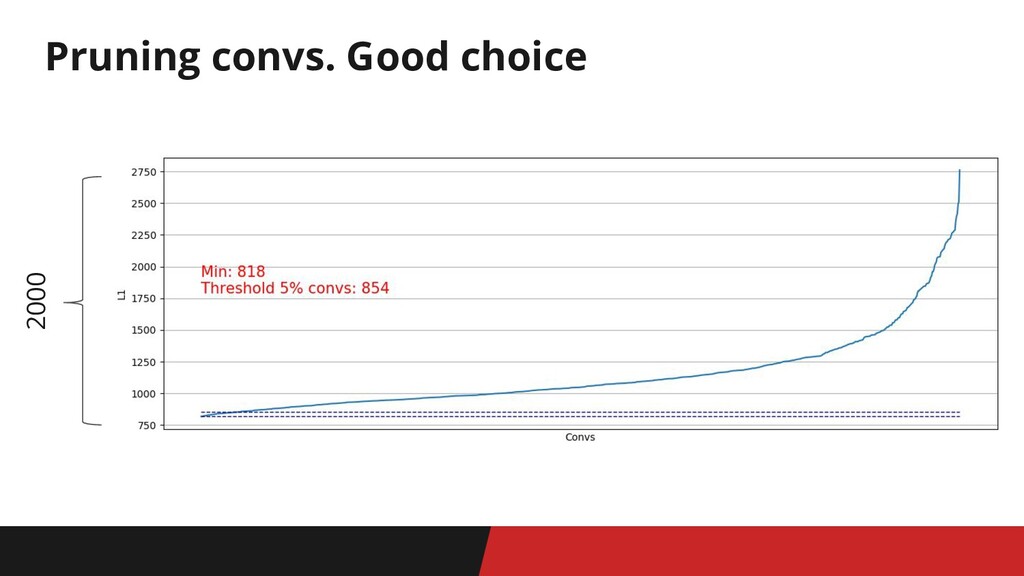
Pruning convs. Good choice 2000
Pruning convs. Bad choice 25
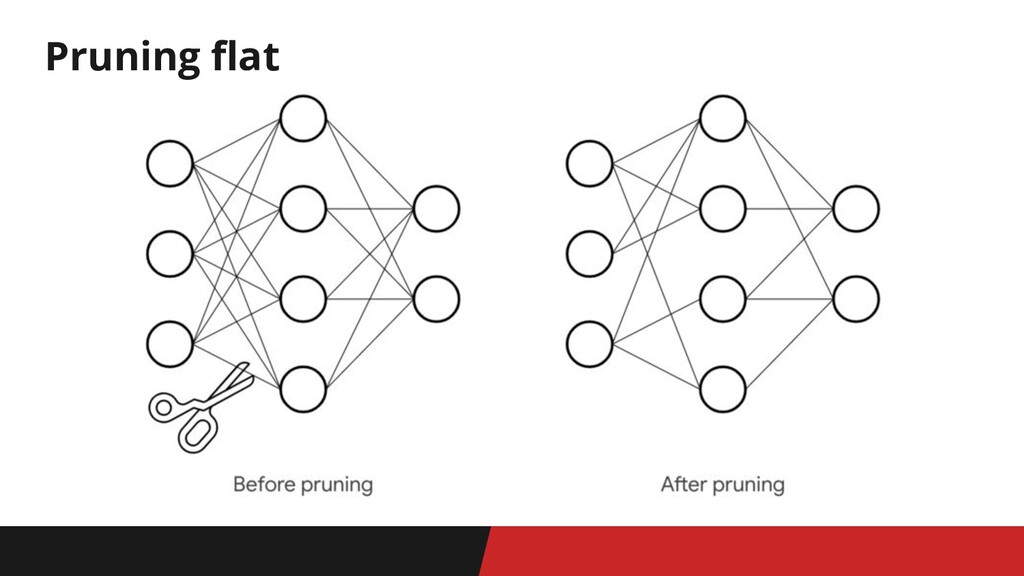
Pruning flat
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Thanks! Questions? [email protected] +7 952 335 65 70](https://files.speakerdeck.com/presentations/11315abc74b741aaba07bd19f41096a0/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}