Share
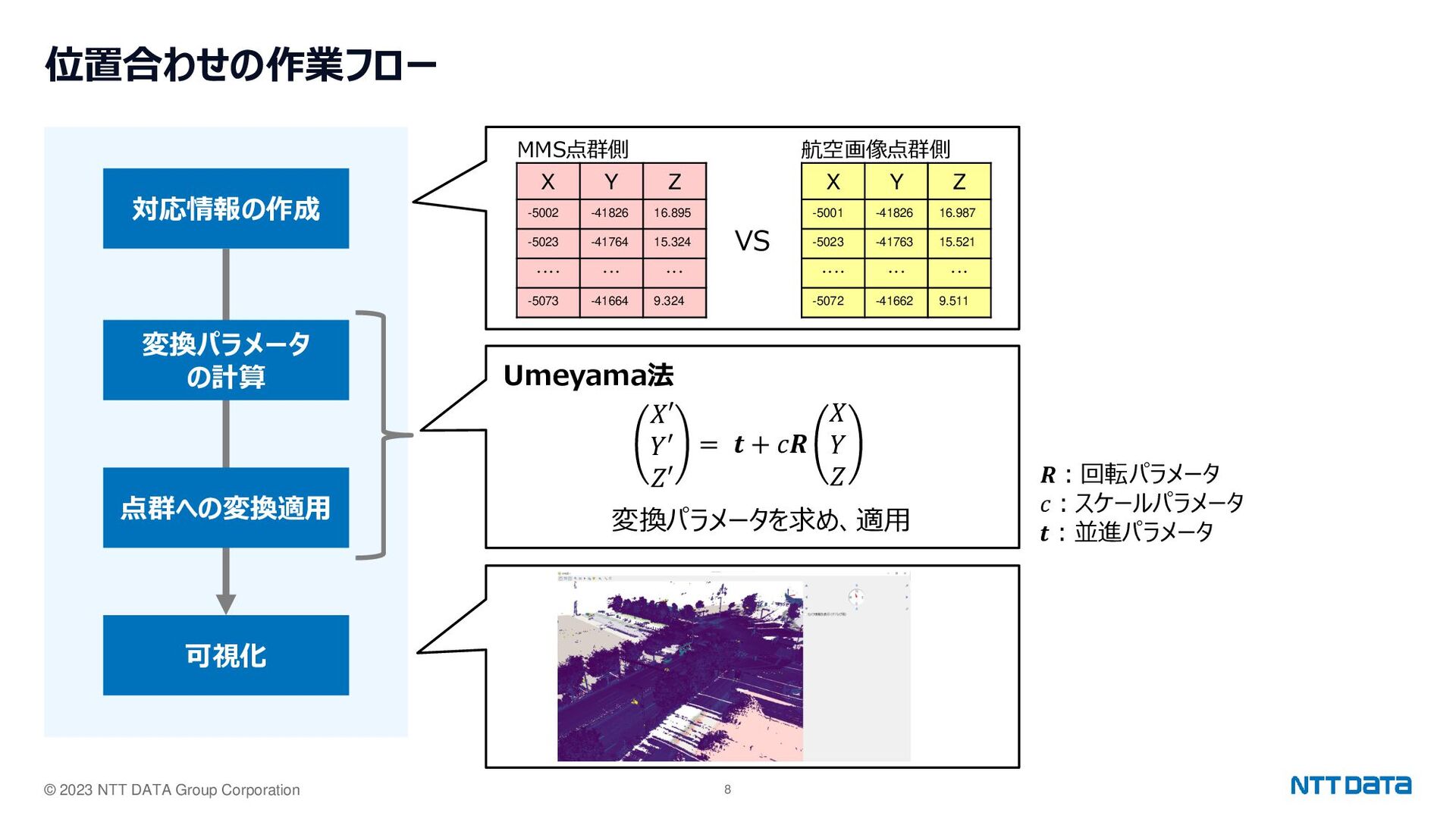
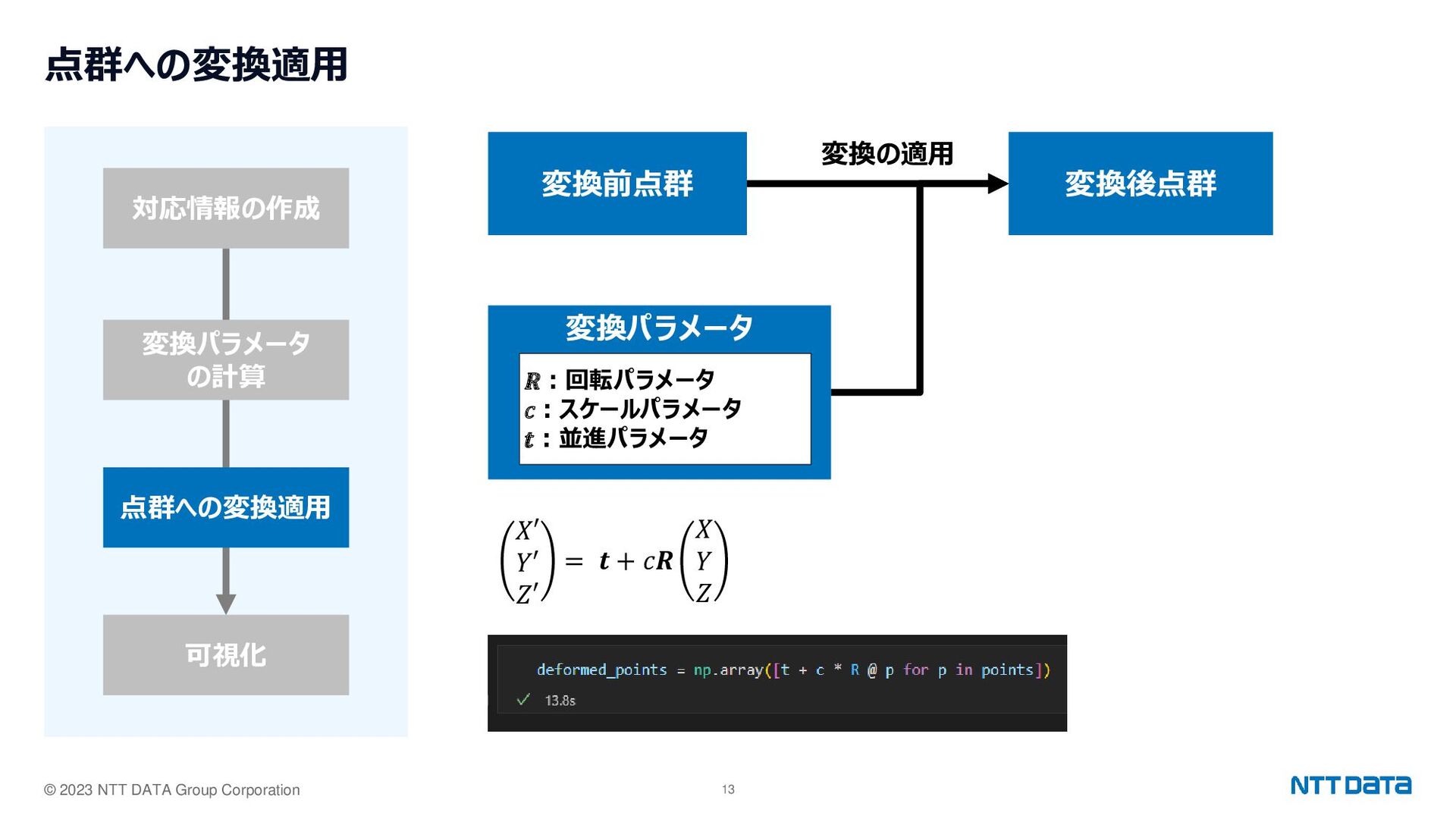
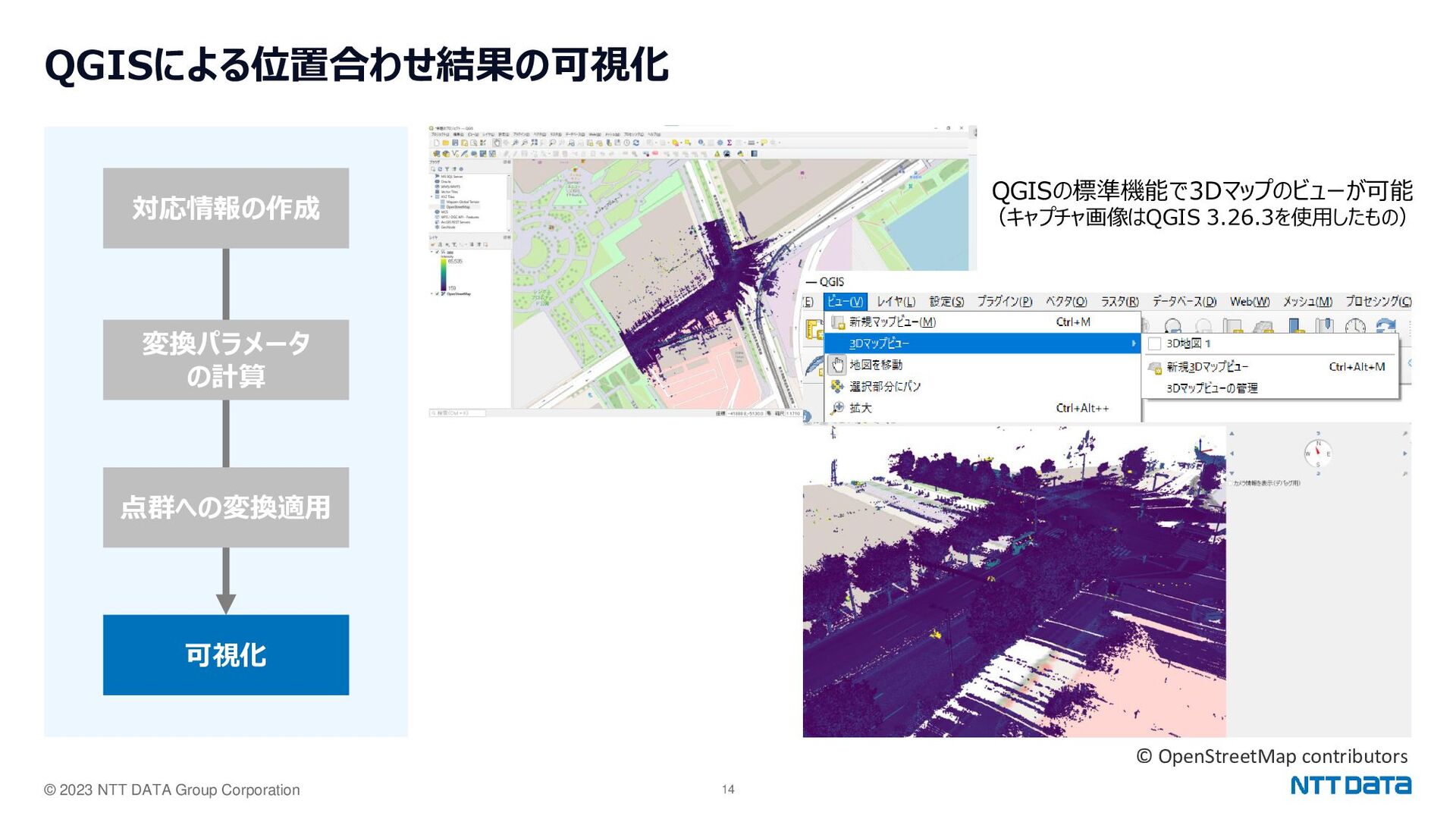
Description FOSS4G 2023 Japan@FUKUI スポンサー講演1:DSM付き航空画像へのMMS計測3D点群データの高精度な位置合わせと可視化方法の紹介 佐橋 功一様、 新垣 仁様(株式会社NTTデータグループ) 発表資料
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}