Exploiting active subspaces for optimization of physics-based models
Talk at SIAM Conference on Optimization, May 2017. Turns out the title was not very descriptive of what I'm talking about. Active subspaces makes a very brief appearance.
Ben L. Fryrear Assistant Professor Applied Mathematics & Statistics Colorado School of Mines activesubspaces.org! @DrPaulynomial! SLIDES AVAILABLE UPON REQUEST DISCLAIMER: These slides are meant to complement the oral presentation. Use out of context at your own risk.
, 1] m PROPERTIES • Numerical approximation of PDE “under the hood” • PDE models a complex physical system • Numerical “noise” • Typically no gradients or Hessians • Expensive to evaluate (minutes-to-months) • More “black box” than PDE-constrained optimization APPLICATIONS I’ve worked on • Design of aerospace systems • Hydrologic system modeling • Renewable energy systems design objective model parameters
, 1] m INTRACTABLE, in general! • Requires dense “trial points” (Theorem 1.3, Törn and Žilinskas (1987)) • Curse of dimensionality (Traub and Werschulz (1998)) VAST LITERATURE on response surface or model-based approaches, e.g., • Jones, Schonlau, and Welch (1998) • Jones [“taxonomy”] (2001) • Shan and Wang [“HEB” review] (2010) • Conn, Scheinberg, and Vicente [intro book] (2009) And many, many other heuristics…
us to notice what we never expected to see.” “Even more understanding is lost if we consider each thing we can do to data only in terms of some set of very restrictive assumptions under which that thing is best possible---assumptions we know we CANNOT check in practice.” “Exploratory data analysis is detective work work …”
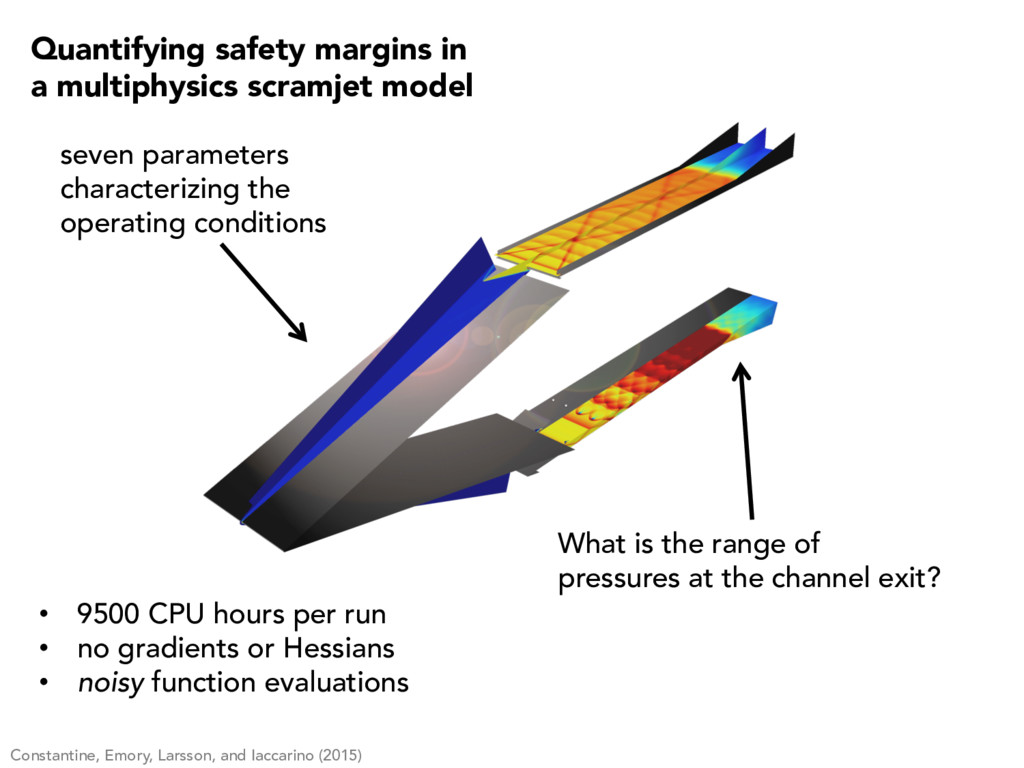
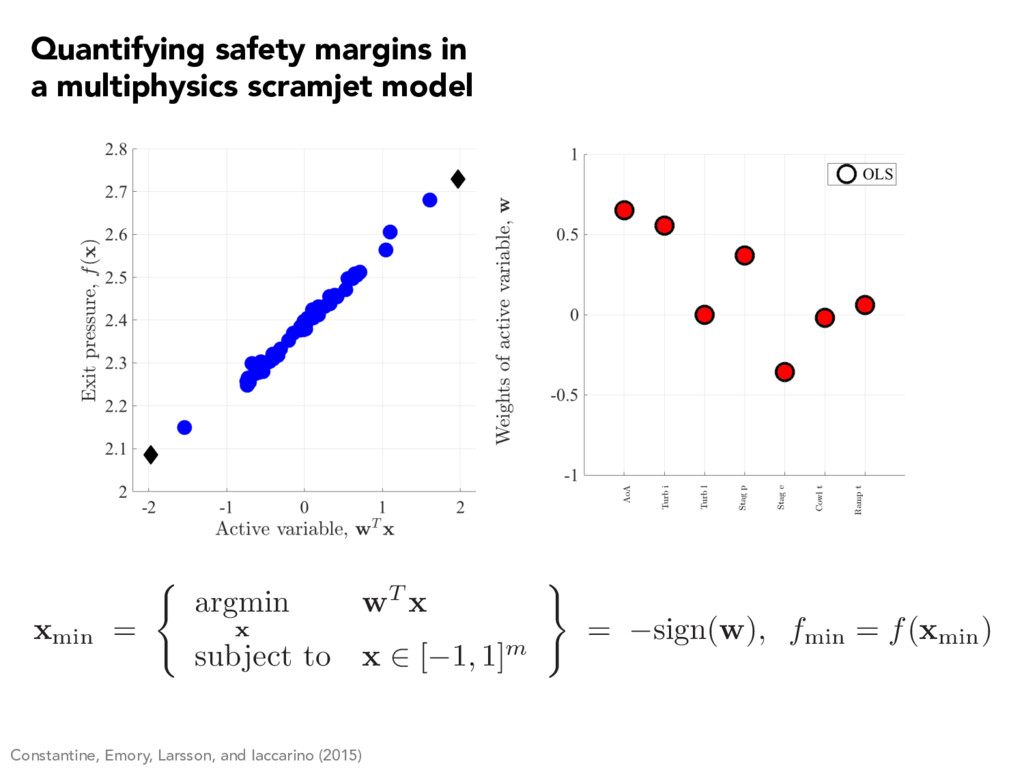
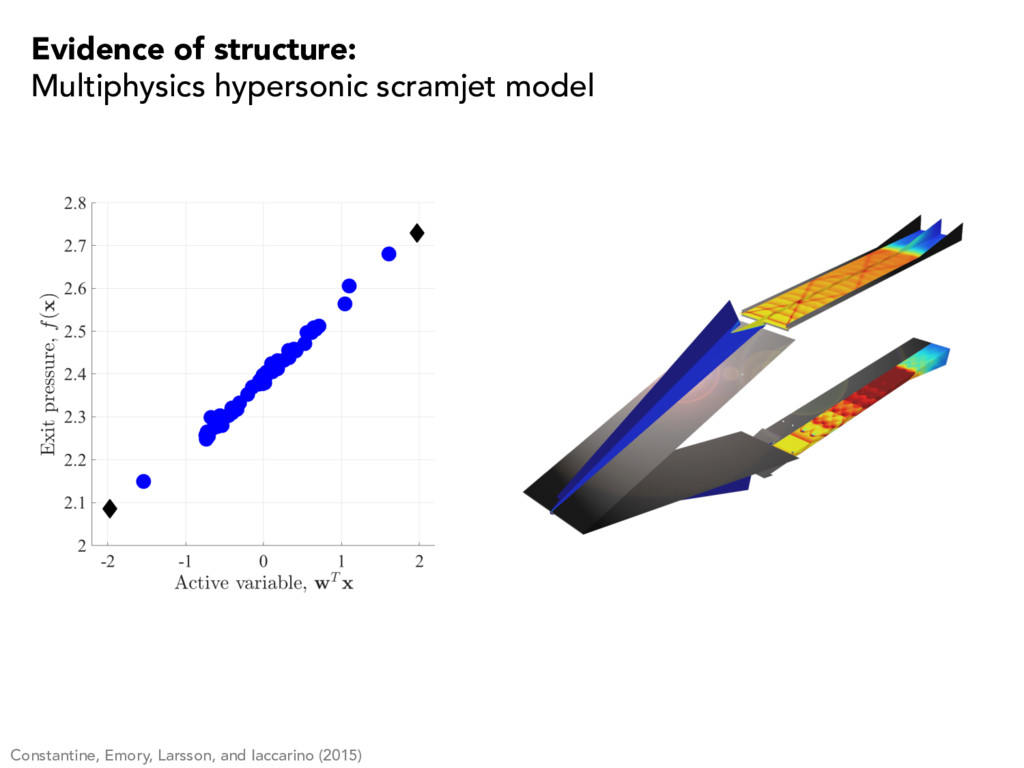
per run • no gradients or Hessians • noisy function evaluations What is the range of pressures at the channel exit? seven parameters characterizing the operating conditions Quantifying safety margins in a multiphysics scramjet model
x 2 [ 1 , 1] m ) = sign(w) , fmin = f (xmin) Constantine, Emory, Larsson, and Iaccarino (2015) Quantifying safety margins in a multiphysics scramjet model
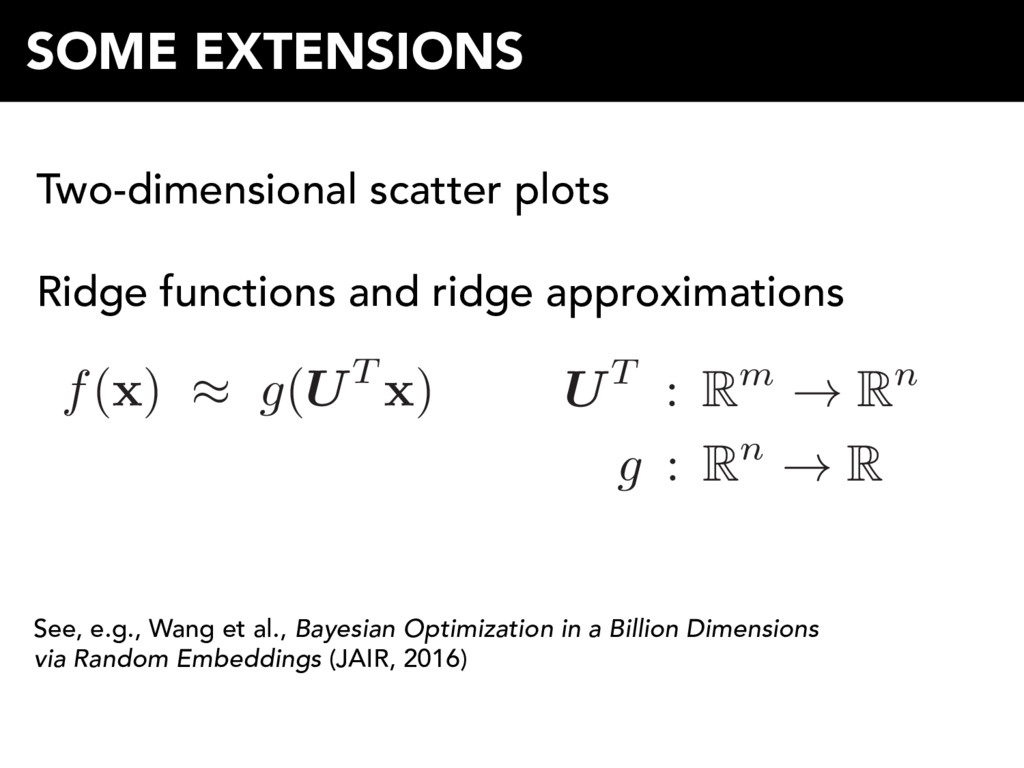
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x )
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x ) NOTES + Maximizes squared correlation + Cheap to fit - Misses quadratic-like behavior
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x ) NOTES Methods for inverse regression
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x ) NOTES • Known as sufficient dimension reduction • See Cook, Regression Graphics (1998)
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x ) NOTES • Two of four average derivative functionals from Samarov (1993) - Require derivatives • Use model-based derivative approximations, if derivatives not available
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x ) NOTES Not all eigenvector- based techniques are PCA!
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x ) NOTES • Related to neural nets; see Hastie et al. ESL (2009) • Different from ridge recovery; see Fornasier et al. (2012)
Cov[ E [ x |f ] ] f( x ) ⇡ a + b T x w = b / k b k How to get ? w Gradient of least-squares linear model [Li and Duan (1989)] Sliced Inverse Regression (SIR): first eigenvector of [Li (1991)] Sliced Average Variance Estimation (SAVE): first eigenvector of [Cook and Weisberg (1991)] Principal Hessian Directions (pHd): first eigenvector of [Li (1992)] E[ r2f( x ) ] Active Subspaces: first eigenvector of [Hristache et al. (2001), Constantine et al. (2014)] E[ rf( x ) rf( x )T ] Projection Pursuit Regression (PPR), Ridge Approximation [Friedman and Stuetzle (1981), Constantine et al. (2016)] min. w,g f( x ) g( w T x ) Regression or approximation? NOTES Glaws, Constantine, and Cook (2017)
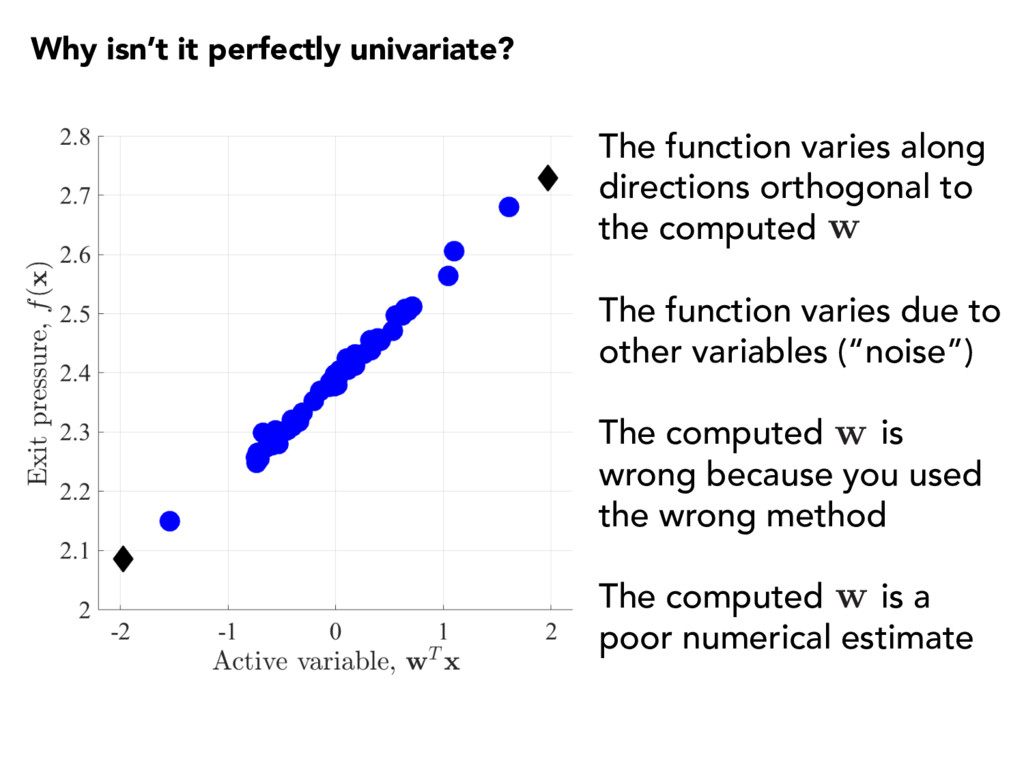
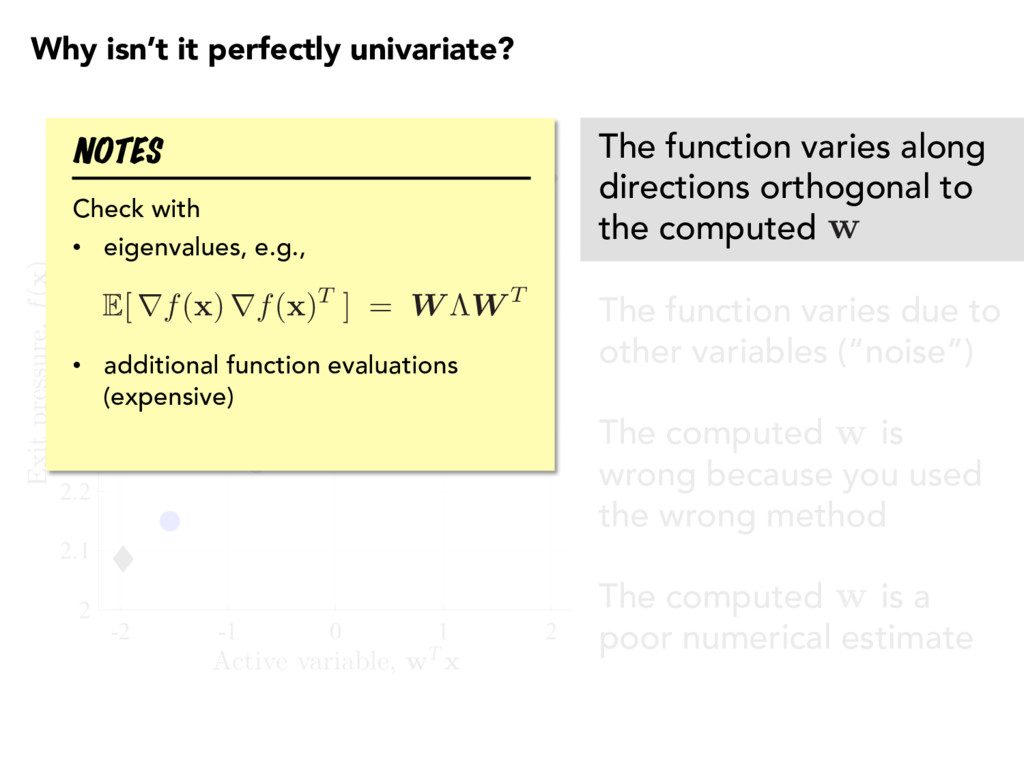
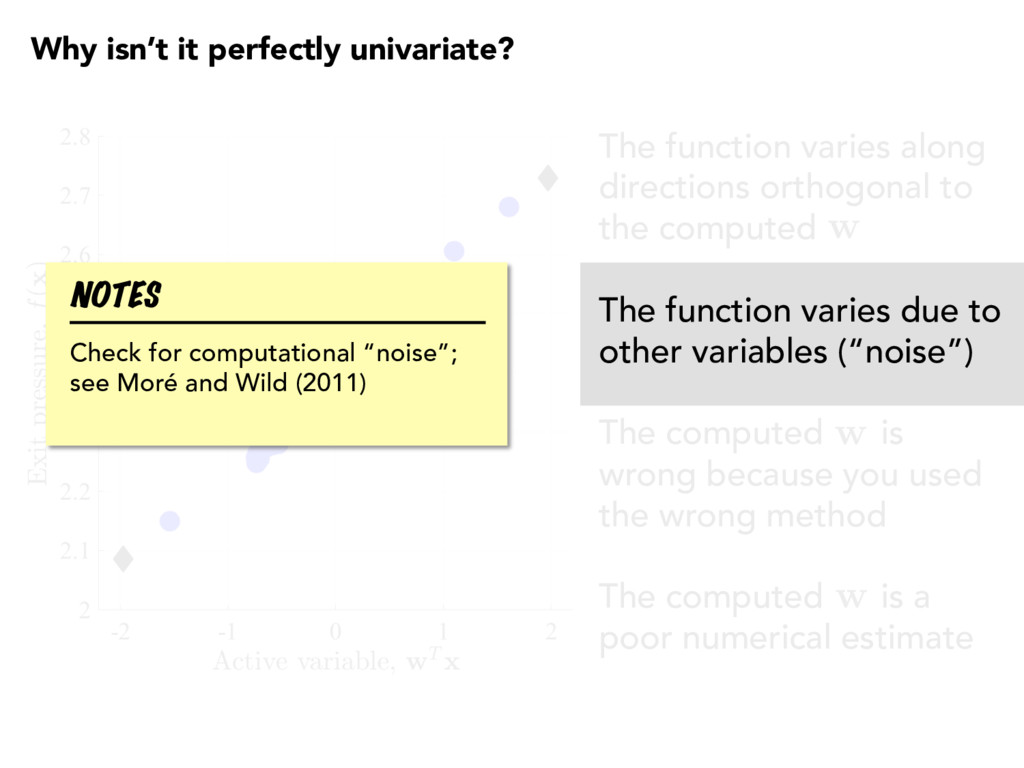
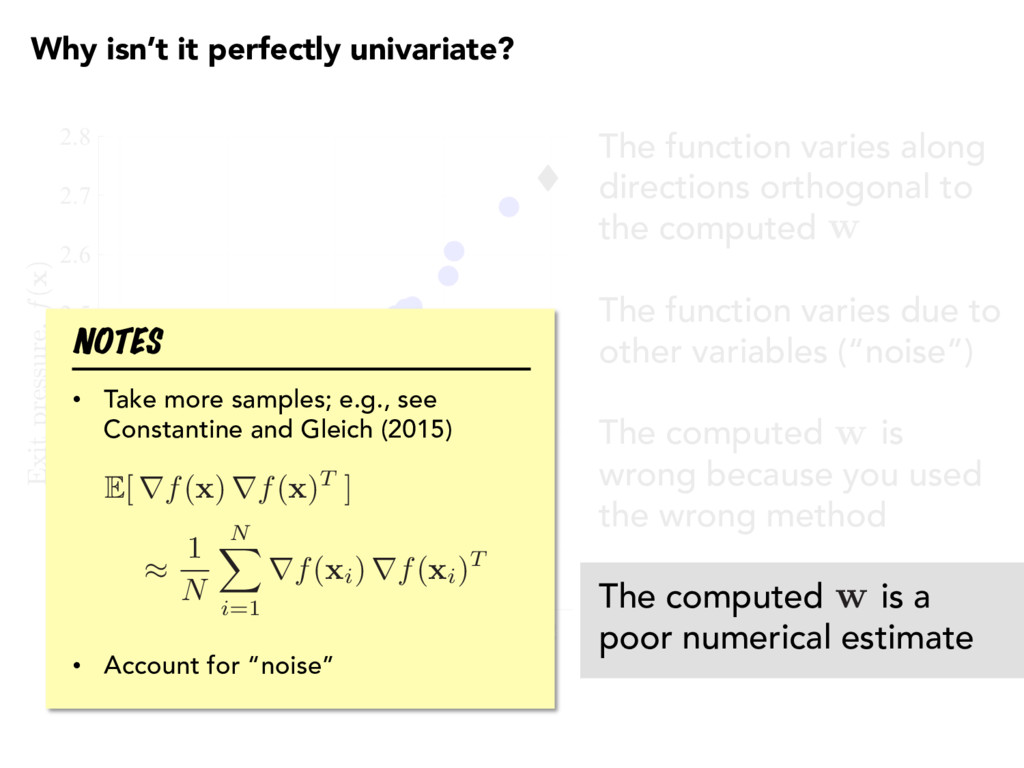
orthogonal to the computed The function varies due to other variables (“noise”) The computed is wrong because you used the wrong method The computed is a poor numerical estimate w w w
orthogonal to the computed The function varies due to other variables (“noise”) The computed is wrong because you used the wrong method The computed is a poor numerical estimate w w w NOTES Check with • eigenvalues, e.g., • additional function evaluations (expensive) E[ rf( x ) rf( x )T ] = W ⇤W T
orthogonal to the computed The function varies due to other variables (“noise”) The computed is wrong because you used the wrong method The computed is a poor numerical estimate w w w NOTES Check for computational “noise”; see Moré and Wild (2011)
orthogonal to the computed The function varies due to other variables (“noise”) The computed is wrong because you used the wrong method The computed is a poor numerical estimate w w w NOTES Try multiple approaches for computing , if possible w
orthogonal to the computed The function varies due to other variables (“noise”) The computed is wrong because you used the wrong method The computed is a poor numerical estimate w w w NOTES • Take more samples; e.g., see Constantine and Gleich (2015) • Account for “noise” E[ rf( x ) rf( x )T ] ⇡ 1 N N X i=1 rf( xi) rf( xi)T
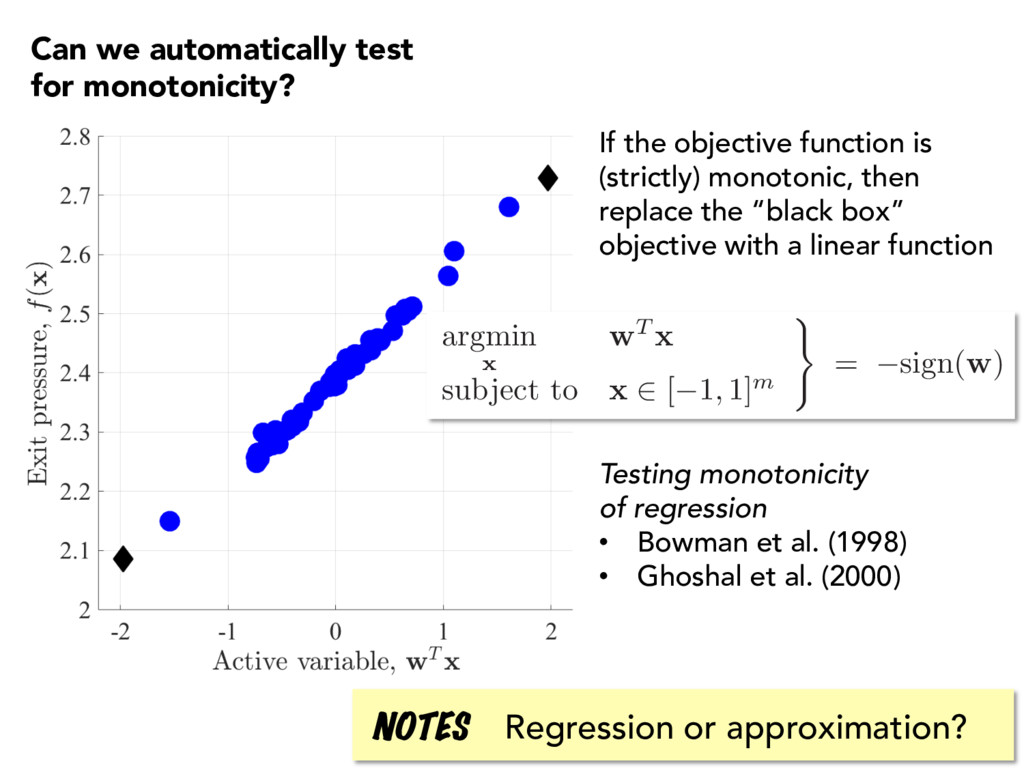
“black box” objective with a linear function Testing monotonicity of regression • Bowman et al. (1998) • Ghoshal et al. (2000) Regression or approximation? NOTES Can we automatically test for monotonicity? argmin x w T x subject to x 2 [ 1 , 1] m ) = sign(w)
(2015) -1 0 1 0 0.05 0.1 AoA -1 0 1 0 0.05 0.1 Turb int -1 0 1 0 0.05 0.1 Turb len -1 0 1 0 0.05 0.1 Stag pres -1 0 1 0 0.05 0.1 Stag enth -1 0 1 0 0.05 0.1 Cowl trans -1 0 1 0 0.05 0.1 Ramp trans Use a bootstrap (sampling with replacement) to assess sensitivity of weights with respect to the “data” NOTES Weight close to zero indicates • high sensitivity in minimizer • low sensitivity in minimum Weight can give sensitivity information; see Constantine and Diaz (2017)
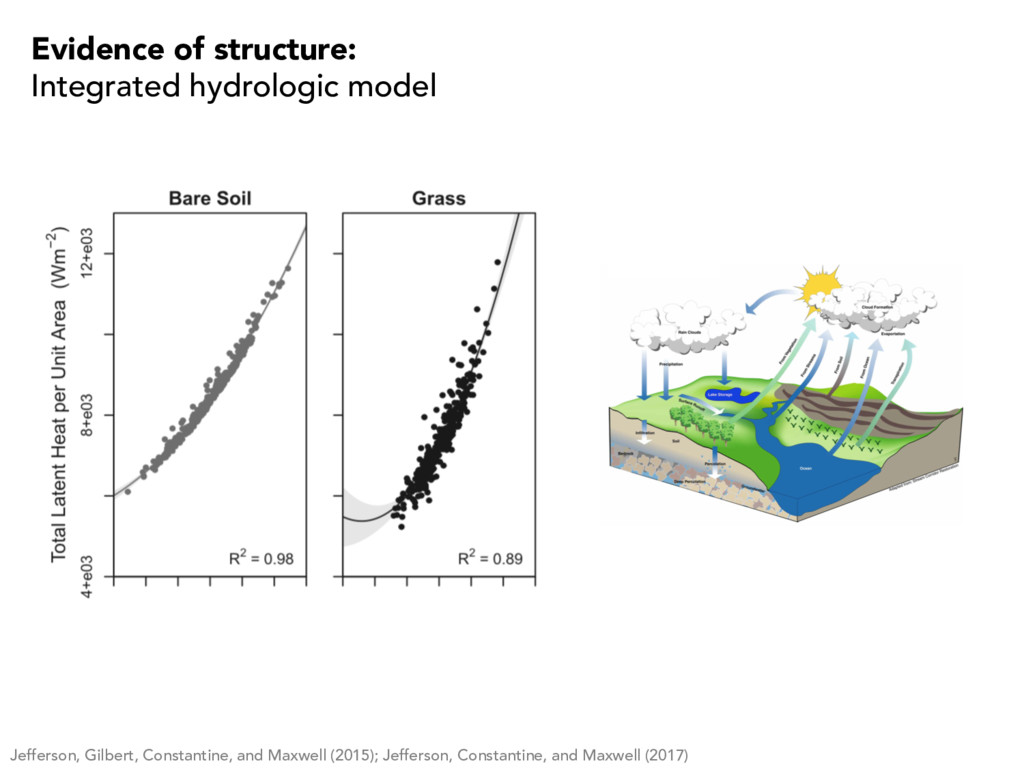
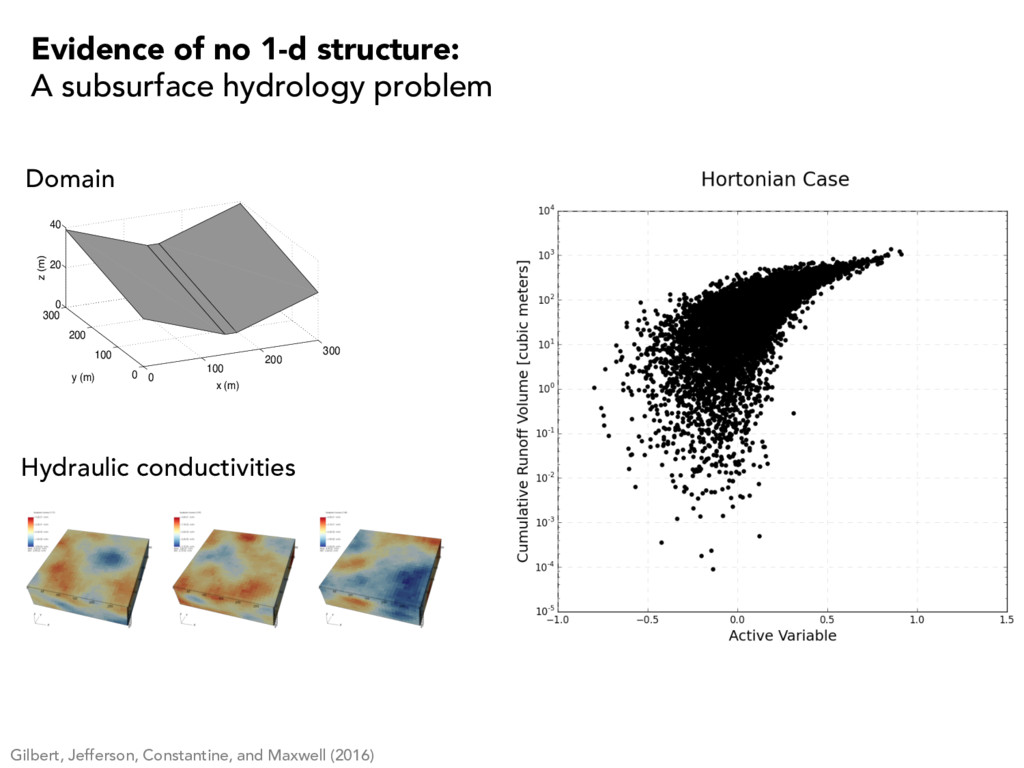
structure: A subsurface hydrology problem 0 100 200 300 0 100 200 300 0 20 40 x (m) y (m) z (m) Student Version of MATLAB Domain Hydraulic conductivities
Mines activesubspaces.org! @DrPaulynomial! TAKE HOME Active Subspaces SIAM (2015) Check your optimization problem for exploitable (low-d, monotonic) structure with exploratory, graphical analysis! QUESTIONS? Ask me about the elliptic PDE problem!
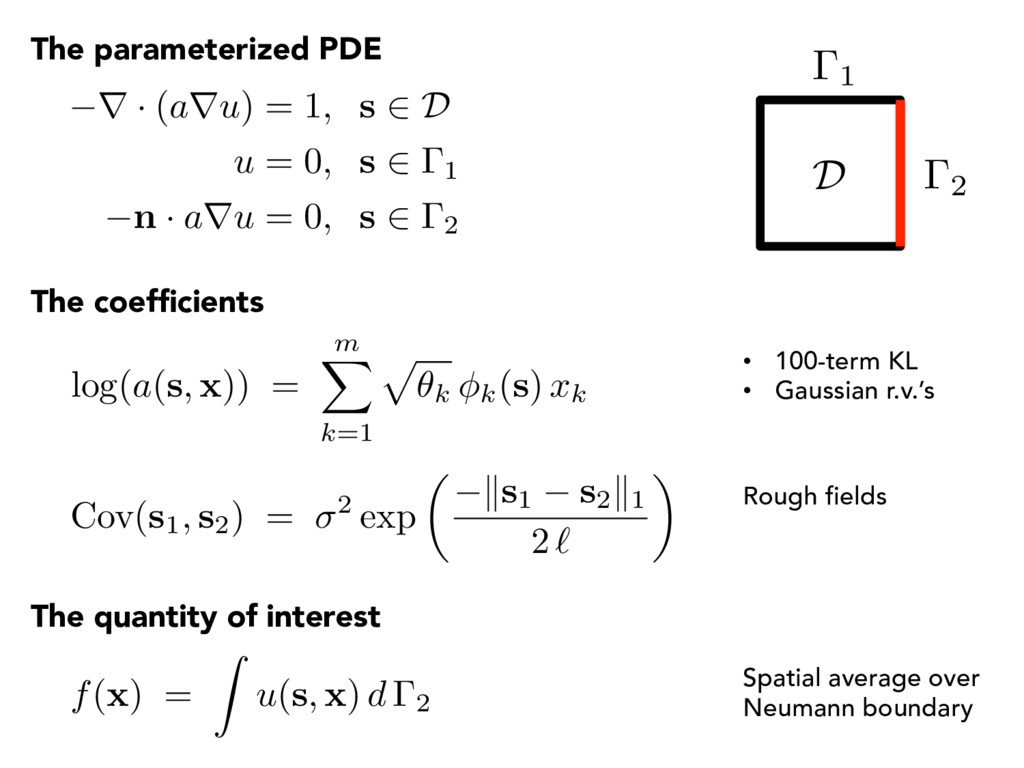
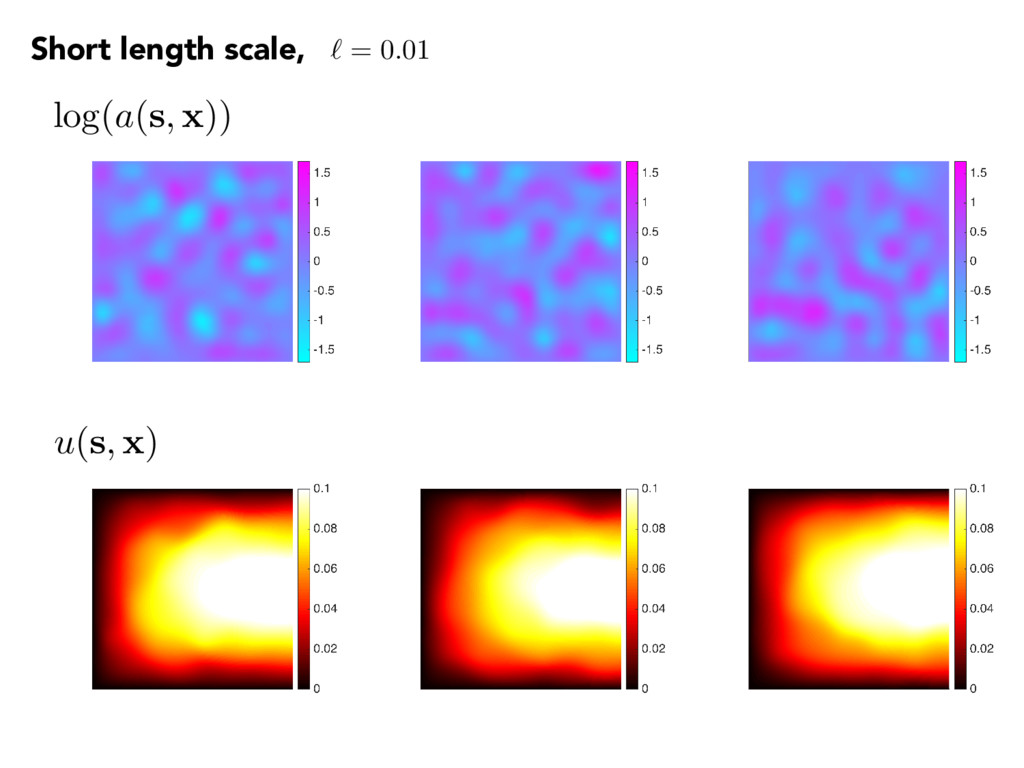
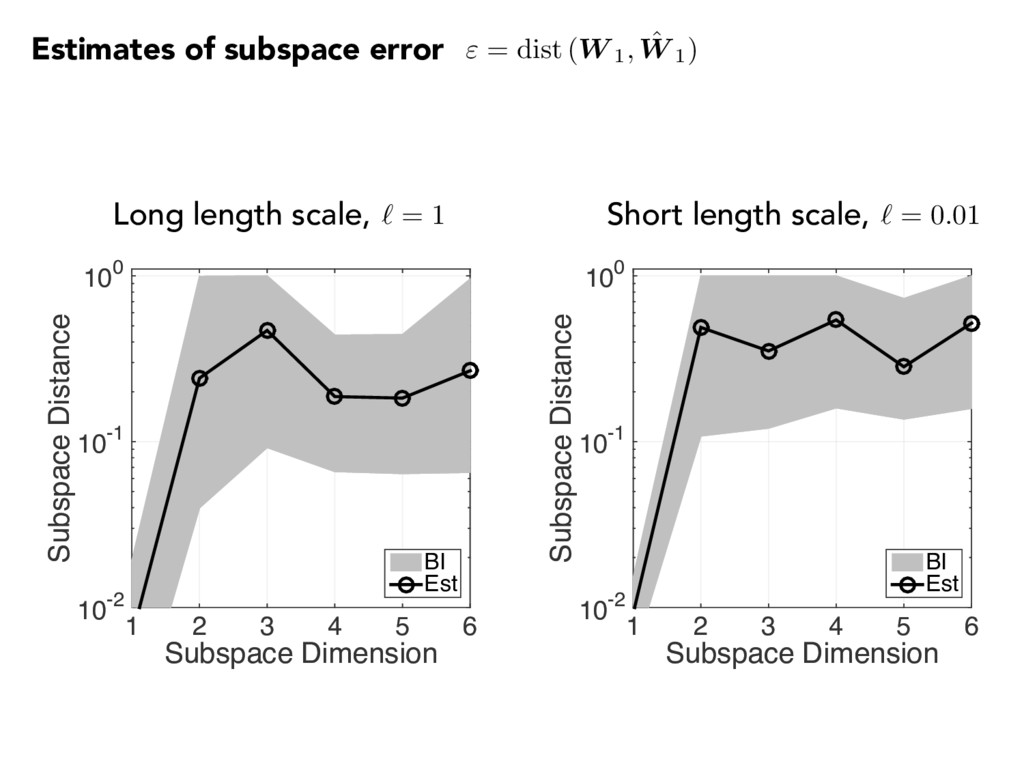
(aru) = 1, s 2 D u = 0, s 2 1 n · aru = 0, s 2 2 log(a(s, x)) = m X k=1 p ✓k k(s) xk Cov( s1, s2) = 2 exp ✓ ks1 s2 k1 2 ` ◆ The quantity of interest f( x ) = Z u( s , x ) d 2 • 100-term KL • Gaussian r.v.’s Rough fields Spatial average over Neumann boundary
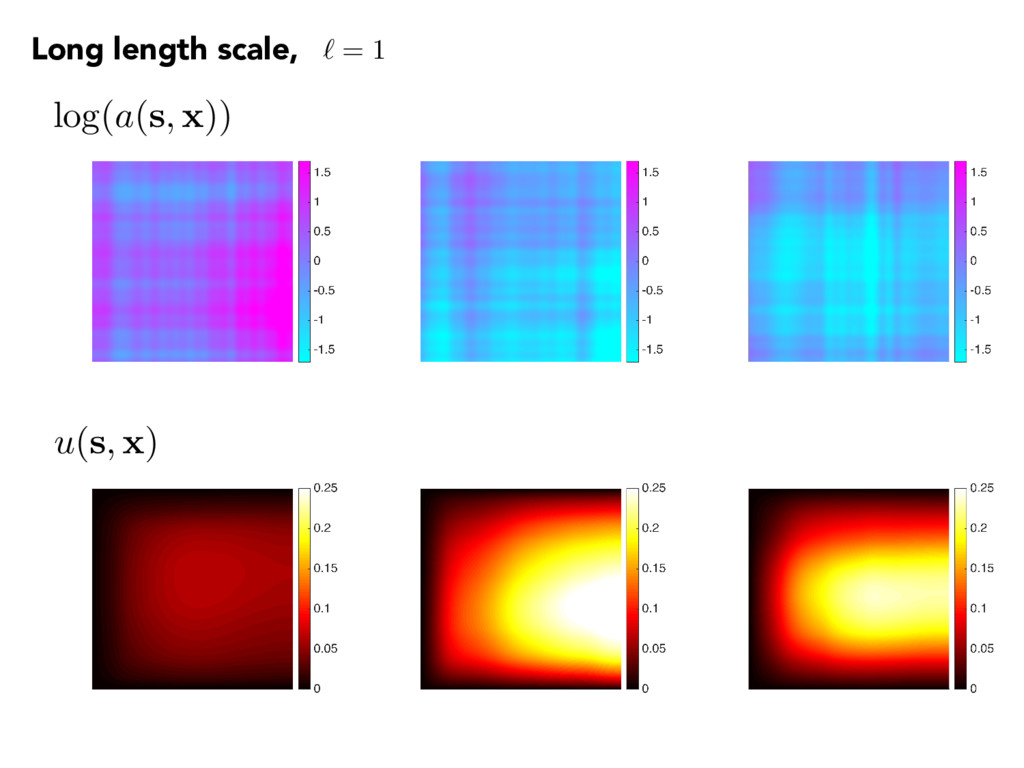
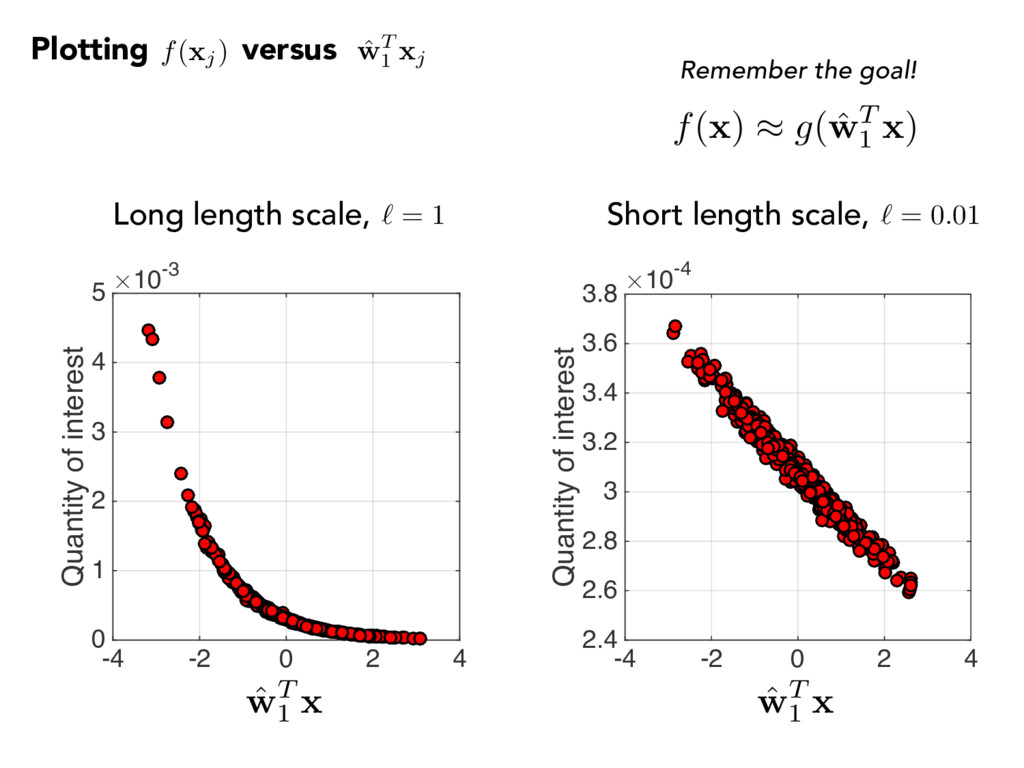
1 2 3 4 5 -4 -2 0 2 4 Quantity of interest #10-4 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 Long length scale, ` = 1 Short length scale, ` = 0.01 f( x ) ⇡ g( ˆ w T 1 x ) ˆ w T 1 x ˆ w T 1 x Remember the goal! Plotting versus f( xj) ˆ w T 1 xj
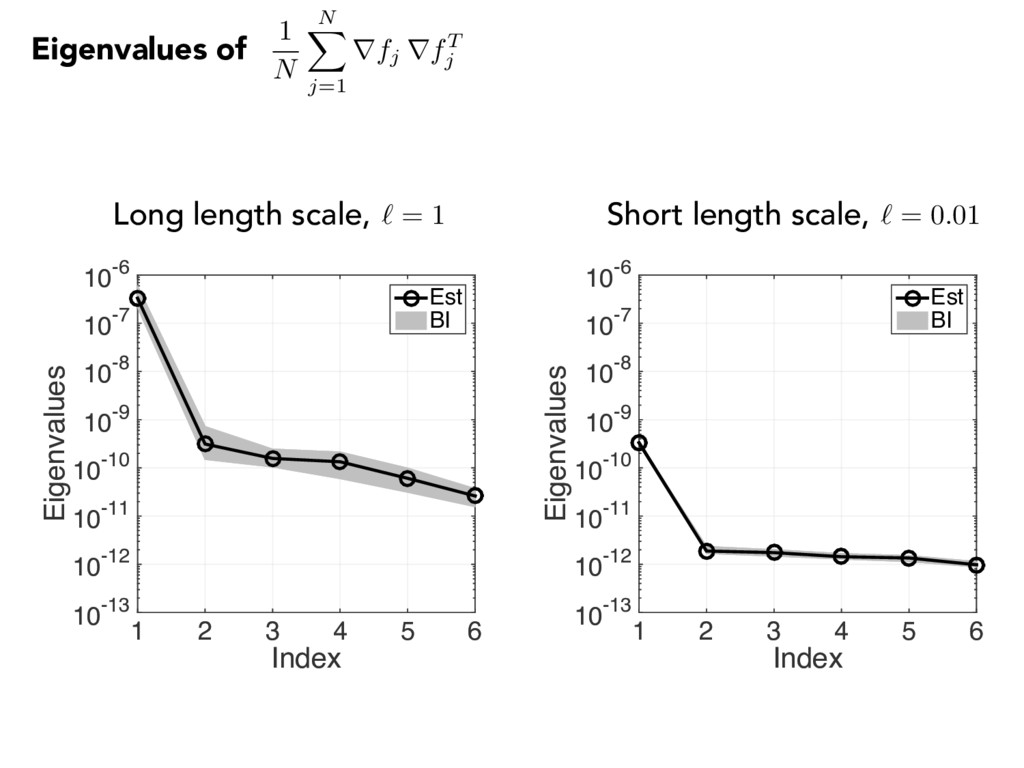
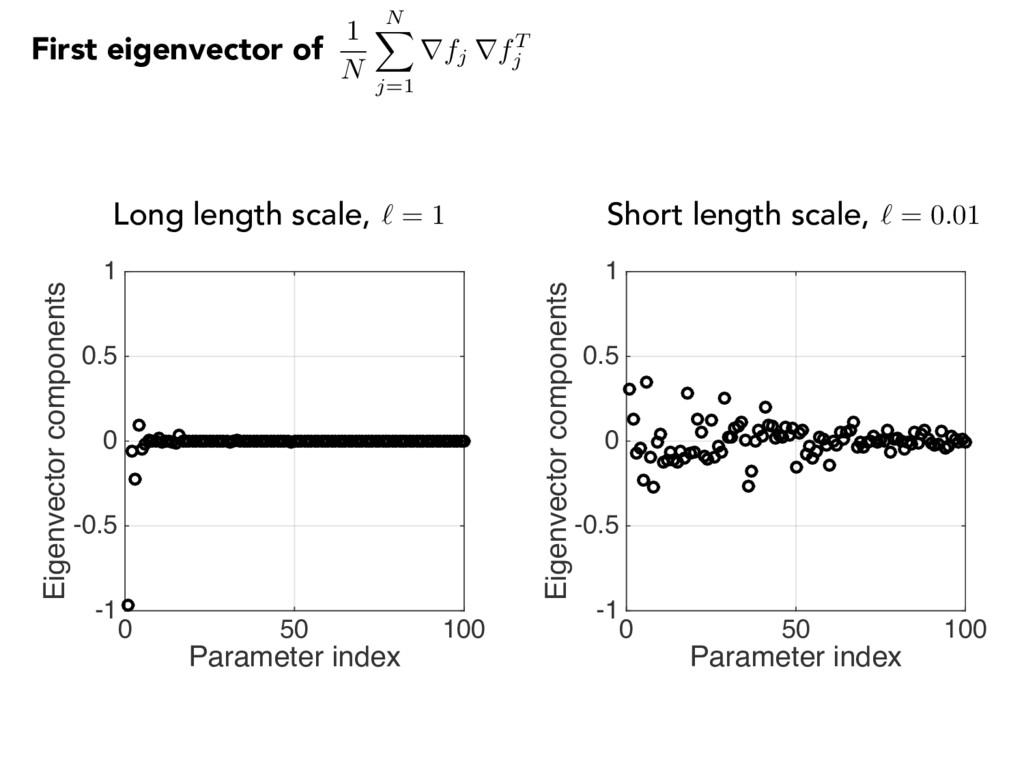
0.5 1 Parameter index 0 50 100 Eigenvector components -1 -0.5 0 0.5 1 First eigenvector of Long length scale, ` = 1 Short length scale, ` = 0.01 1 N N X j=1 rfj rfT j
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_9.jpg){kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_10.jpg){kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_11.jpg){kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_12.jpg){kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_13.jpg){kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_14.jpg){kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_15.jpg){kind=link}
![E [ ( I Cov[ x |f ]) 2 ]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![2 0 2 wT x 3.2 3.4 3.6 Voltage [V]](https://files.speakerdeck.com/presentations/38faed18dfa1436a896a3eab612a6f36/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}