& PROFESSORS • Legal voltage and power • Legal width • Legal height • Legal length • Move faster than 1in/ sec • Be able to follow lines from Basic, Intermediate, and Advanced courses quickly CLASSMATES • Safe • Look good • Functions • Represents our section at the final competition • Is fast OURSELVES • Large learning outcome • Challenge ourselves • Develop good hardware & software co-practices • Earns a great grade • Gets us interested in line following algorithms • Reliability • Reproducible for future teams/well documented
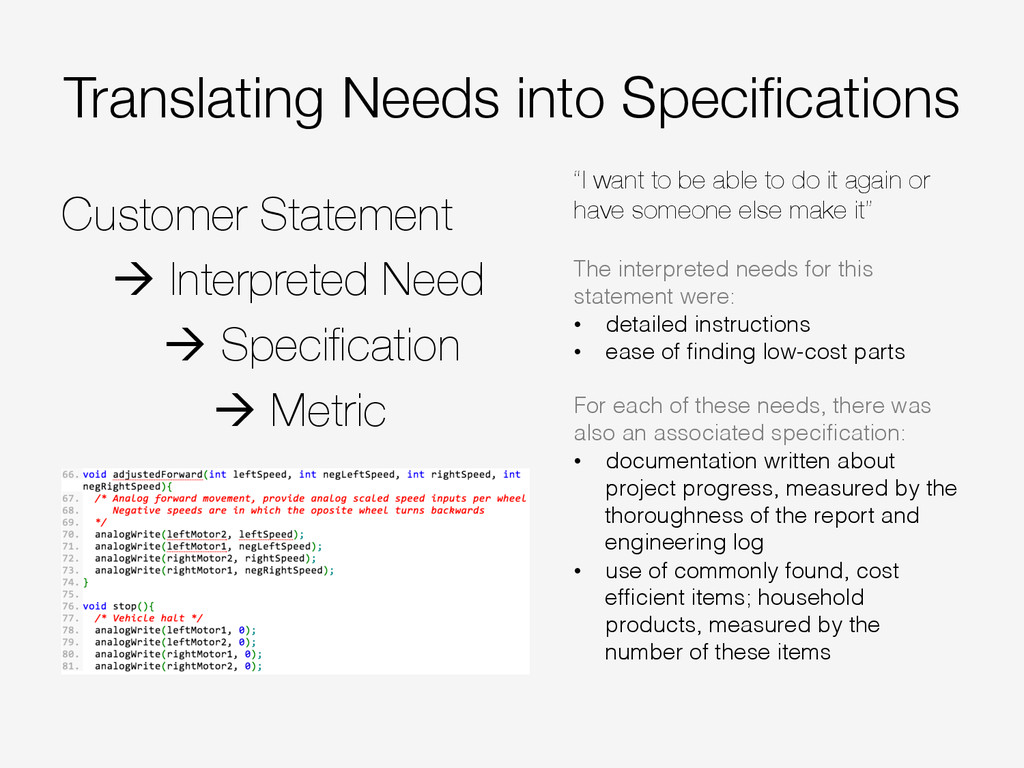
Specification à Metric “I want to be able to do it again or have someone else make it” The interpreted needs for this statement were:! • detailed instructions! • ease of finding low-cost parts! ! For each of these needs, there was also an associated specification:! • documentation written about project progress, measured by the thoroughness of the report and engineering log! • use of commonly found, cost efficient items; household products, measured by the number of these items!
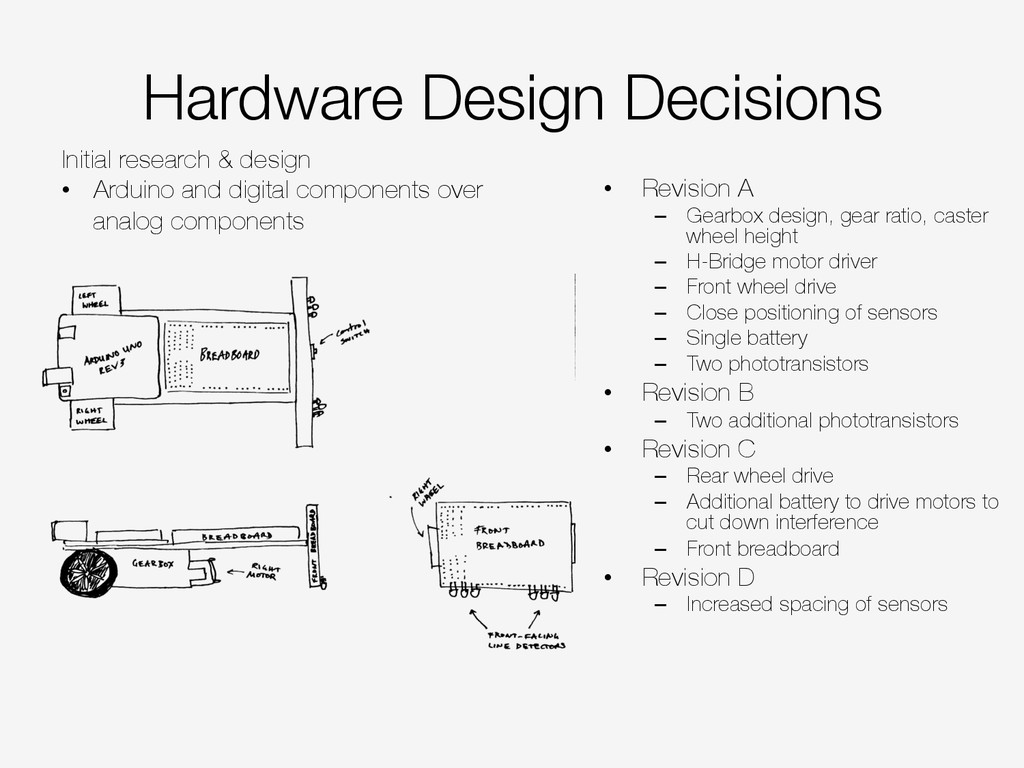
ratio, caster wheel height – H-Bridge motor driver – Front wheel drive – Close positioning of sensors – Single battery – Two phototransistors • Revision B – Two additional phototransistors • Revision C – Rear wheel drive – Additional battery to drive motors to cut down interference – Front breadboard • Revision D – Increased spacing of sensors Initial research & design • Arduino and digital components over analog components
parts: we aimed toward developing robust and reliable software – Per-run calibration – Thresholding – Pseudo-binary line-identification and response system – Proportional and derivative control – Iterative testing to determine proper gain values
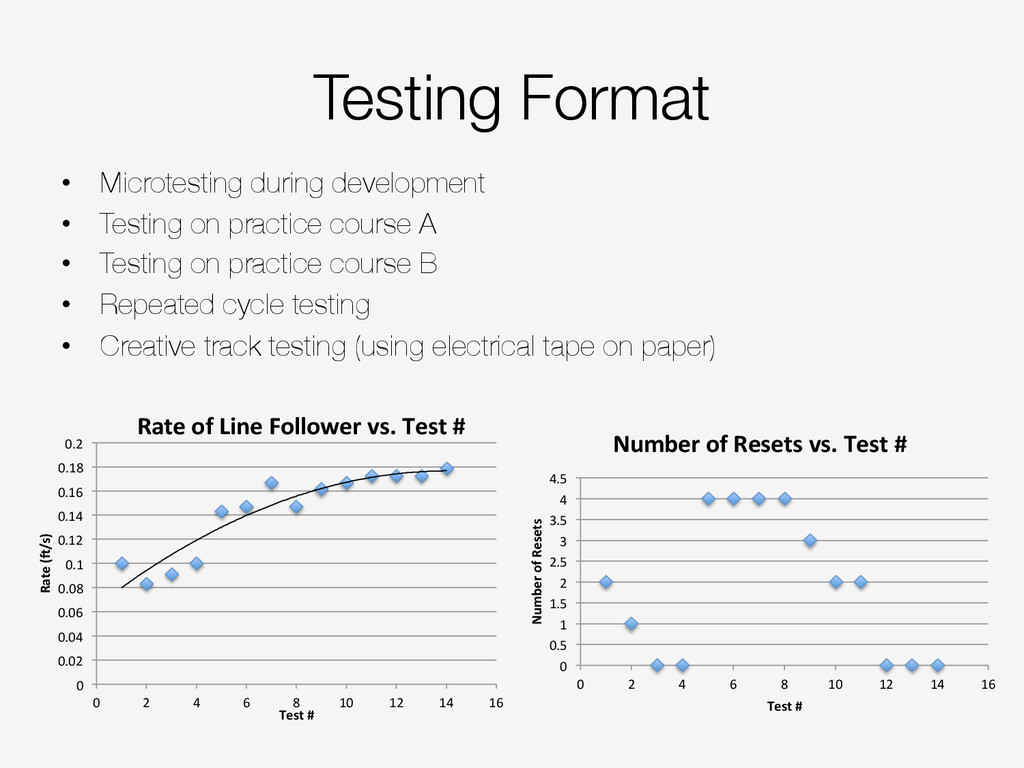
course A • Testing on practice course B • Repeated cycle testing • Creative track testing (using electrical tape on paper) 0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2 0 2 4 6 8 10 12 14 16 Rate (D/s) Test # Rate of Line Follower vs. Test # 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 0 2 4 6 8 10 12 14 16 Number of Resets Test # Number of Resets vs. Test #
Iterative design – Rigorous testing – Review However, there is always room for improvement and we believe that with some software adjustments, we should be able to perform even better at the final competition
capable of following new tracks, reliable, and precise is difficult using low-budget components • Never trust parts, always unit test and functional test before assembly and complete integration • Begin early. If we had not, we wouldn’t have had time to deal with many issues we ran into
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}