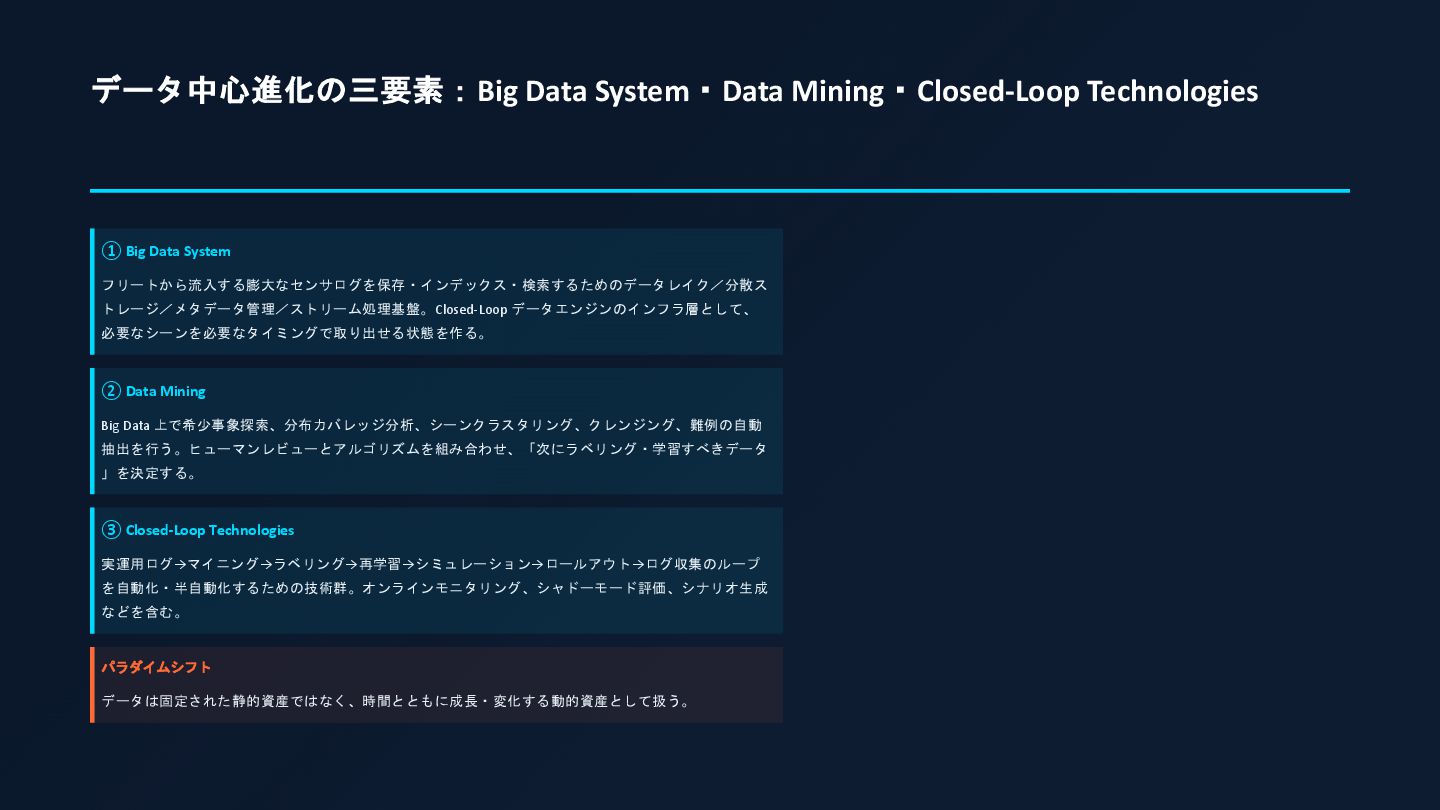
トレージ/メタデータ管理/ストリーム処理基盤。Closed-Loop データエンジンのインフラ層として、 必要なシーンを必要なタイミングで取り出せる状態を作る。 ② Data Mining Big Data 上で希少事象探索、分布カバレッジ分析、シーンクラスタリング、クレンジング、難例の自動 抽出を行う。ヒューマンレビューとアルゴリズムを組み合わせ、「次にラベリング・学習すべきデータ 」を決定する。 ③ Closed-Loop Technologies 実運用ログ→マイニング→ラベリング→再学習→シミュレーション→ロールアウト→ログ収集のループ を自動化・半自動化するための技術群。オンラインモニタリング、シャドーモード評価、シナリオ生成 などを含む。 パラダイムシフト データは固定された静的資産ではなく、時間とともに成長・変化する動的資産として扱う。
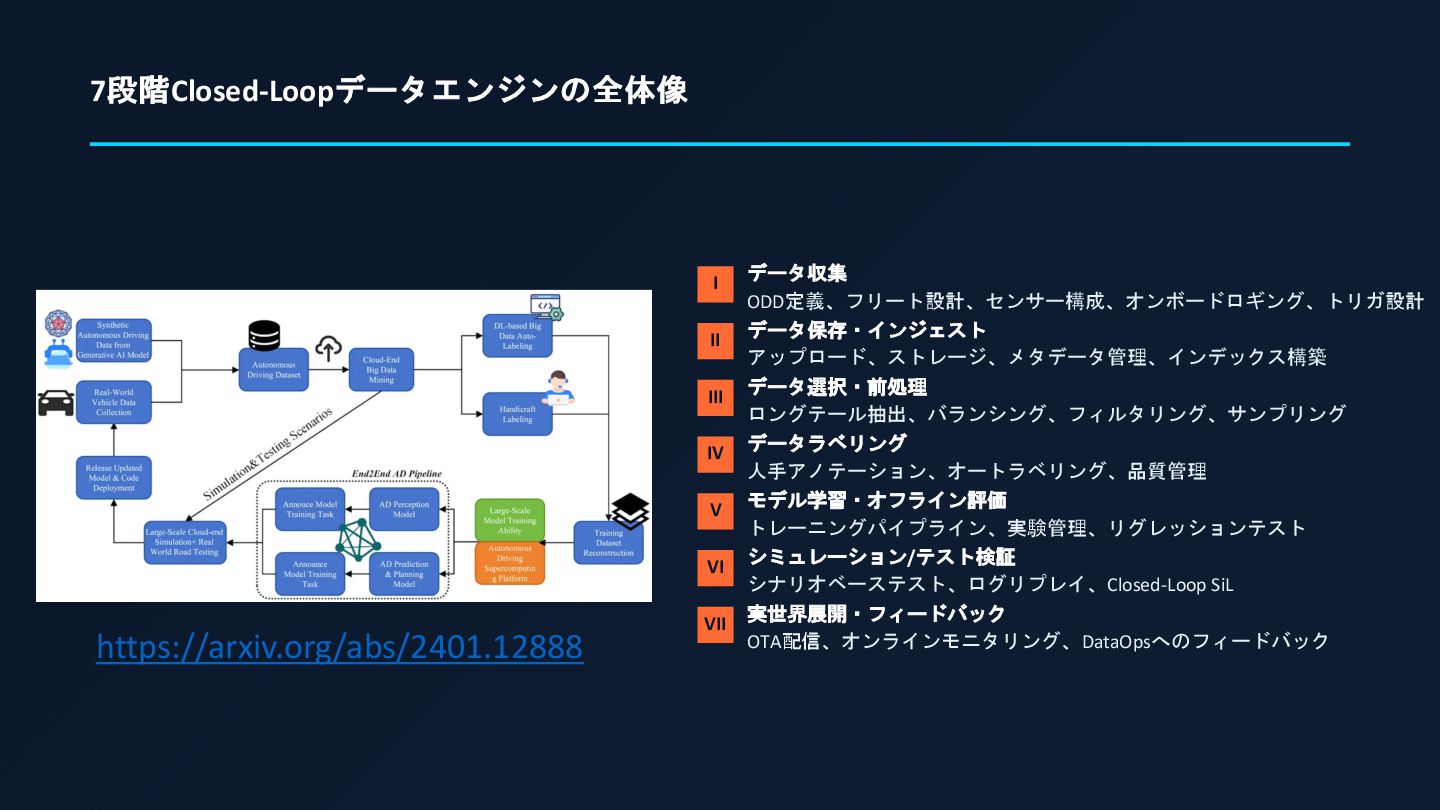
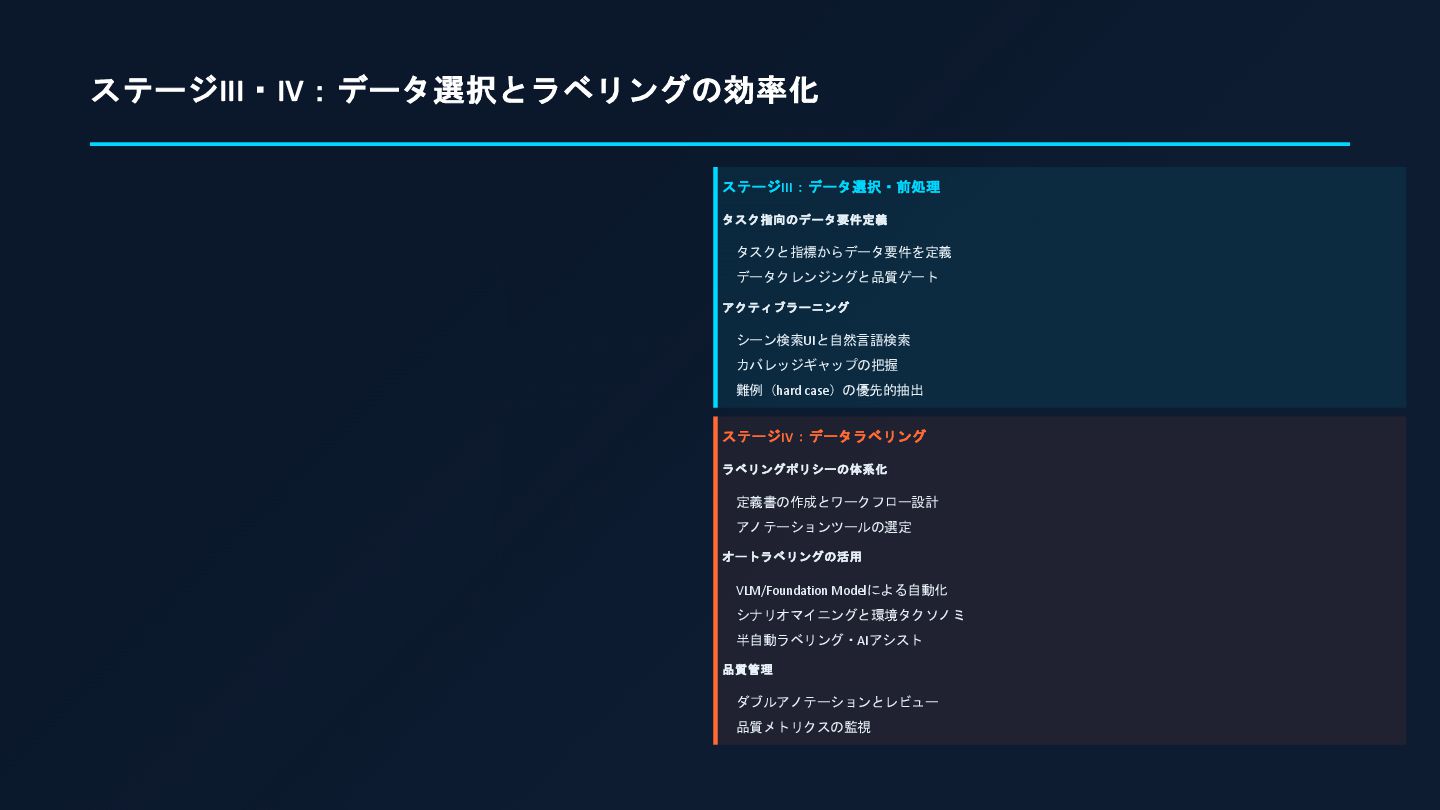
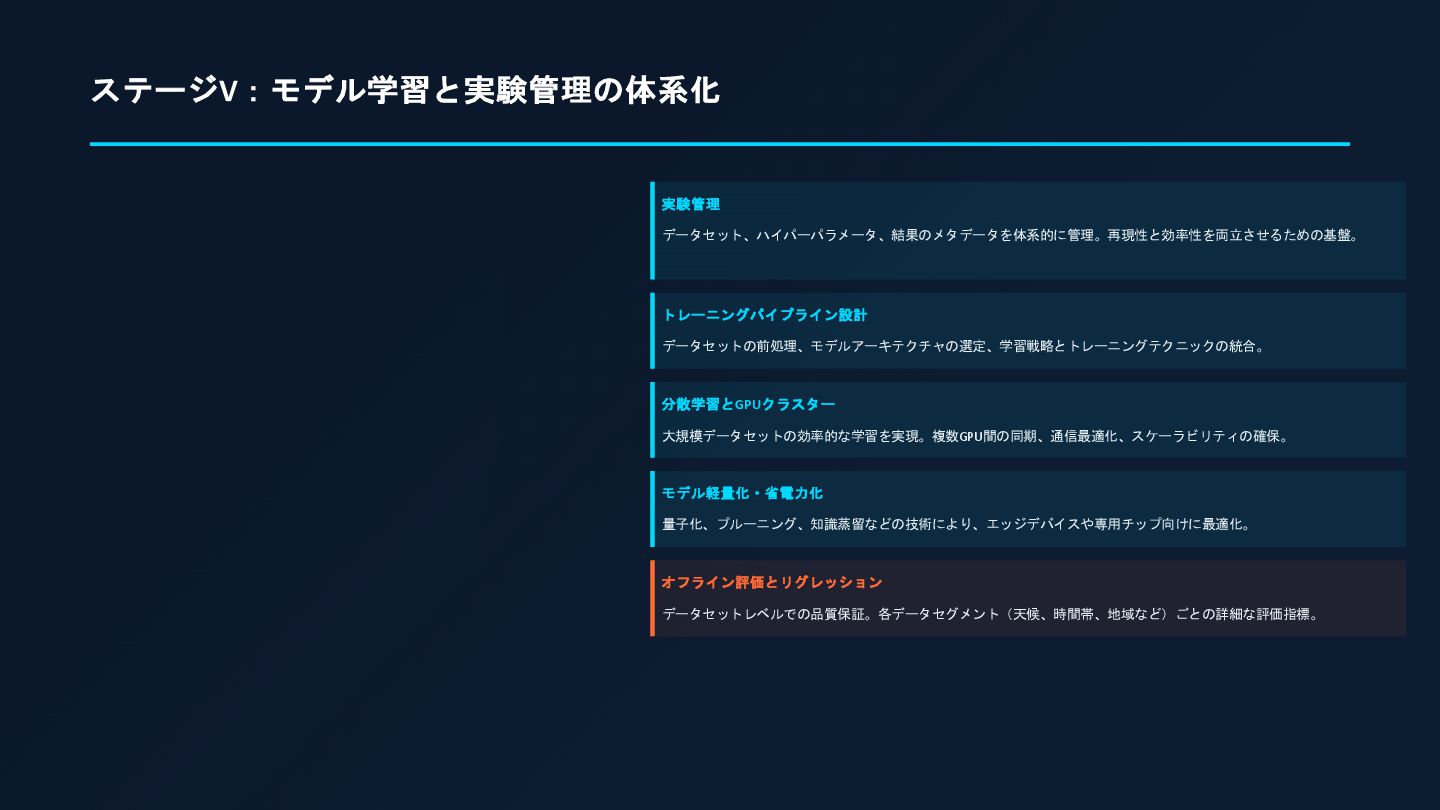
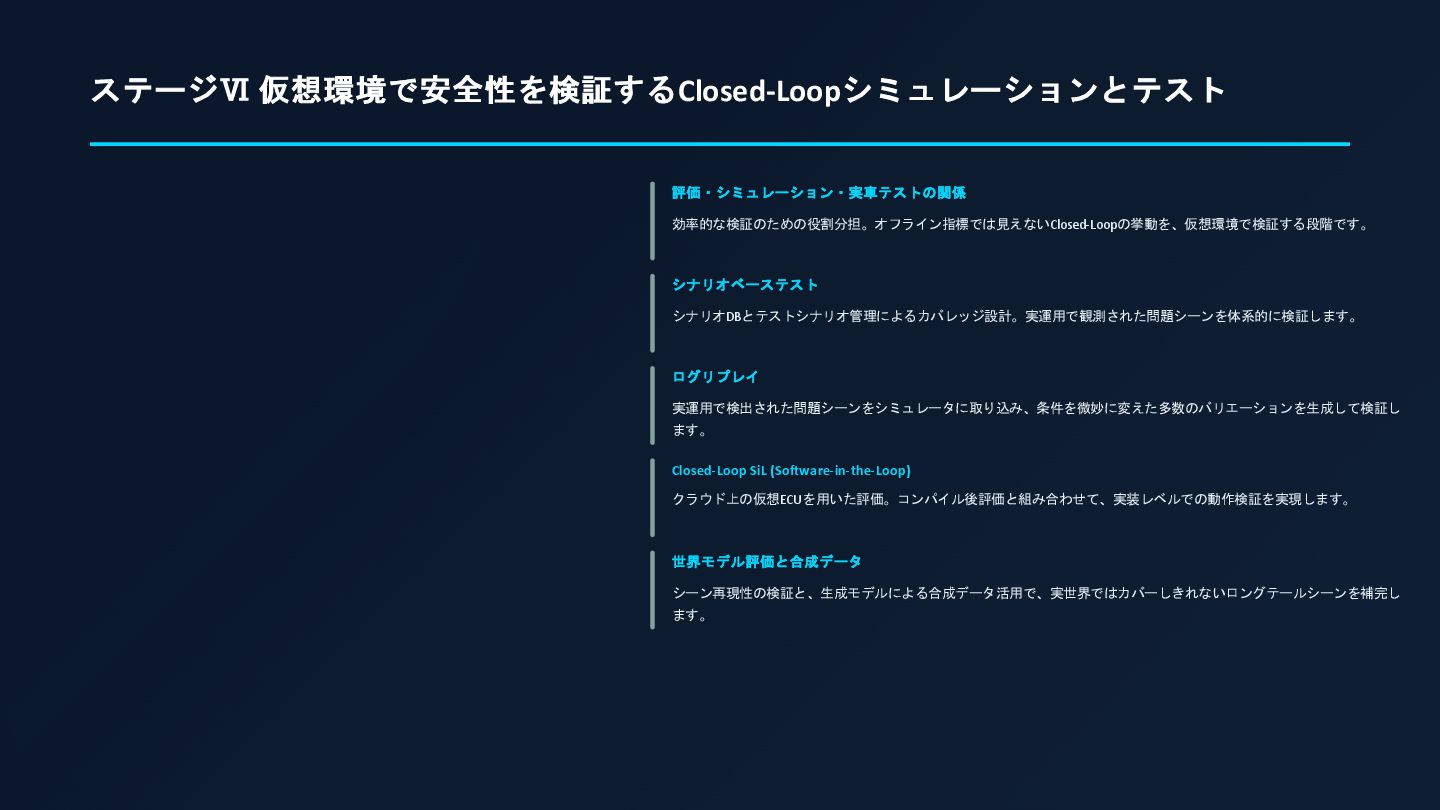
IV データラベリング 人手アノテーション、オートラベリング、品質管理 V モデル学習・オフライン評価 トレーニングパイプライン、実験管理、リグレッションテスト VI シミュレーション/テスト検証 シナリオベーステスト、ログリプレイ、Closed-Loop SiL VII 実世界展開・フィードバック OTA配信、オンラインモニタリング、DataOpsへのフィードバック https://arxiv.org/abs/2401.12888
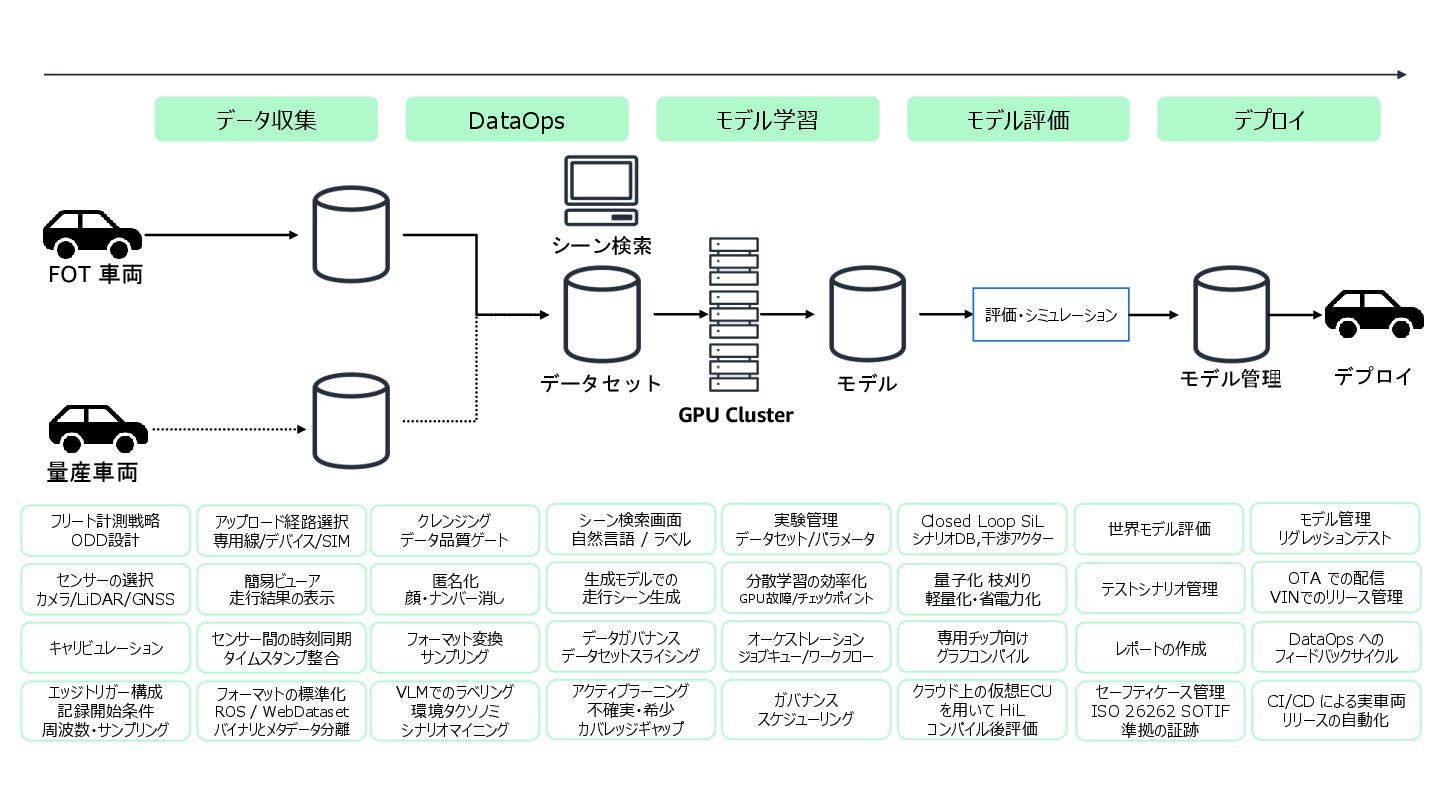
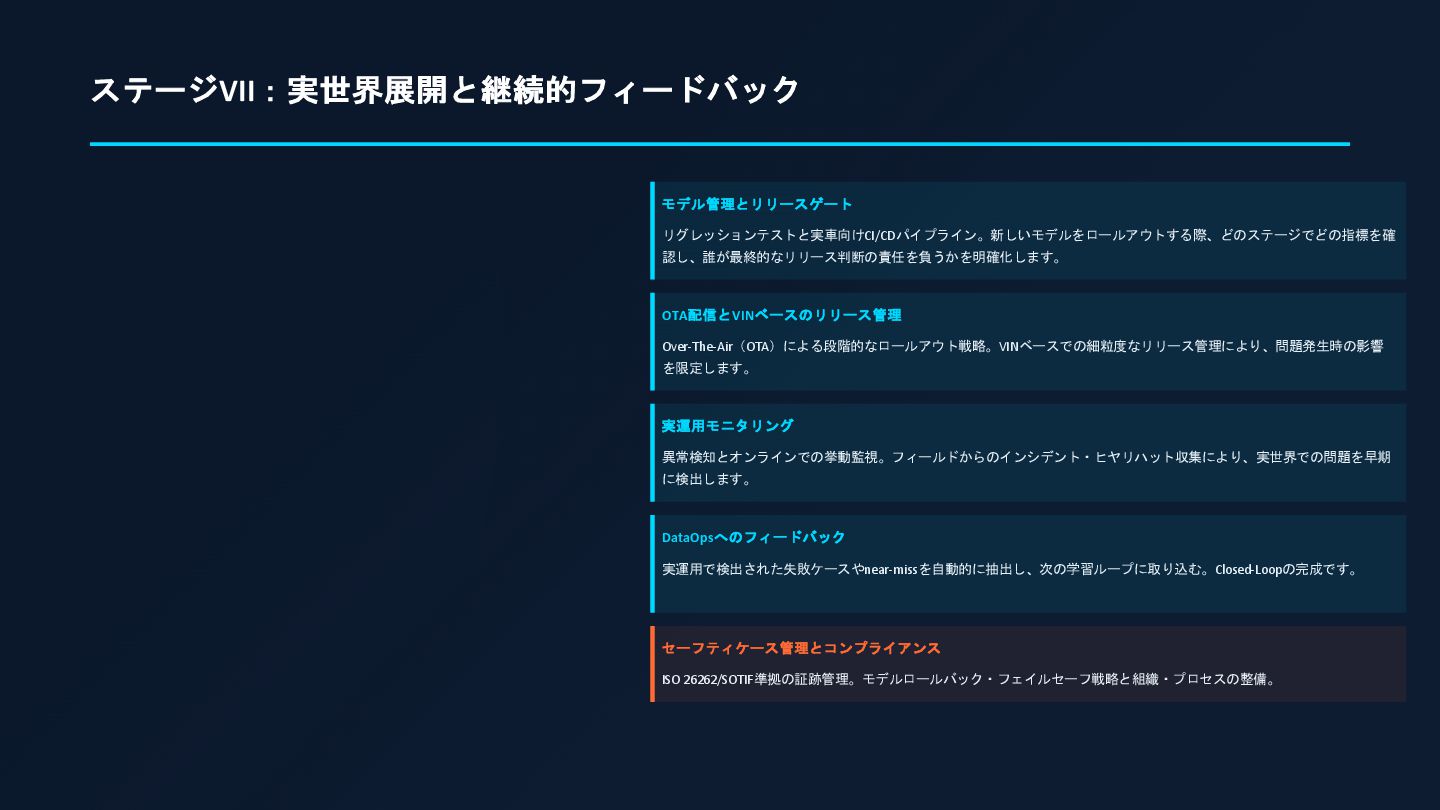
DataOpsへのフィードバック 実運用で検出された失敗ケースやnear-missを自動的に抽出し、次の学習ループに取り込む。Closed-Loopの完成です。 セーフティケース管理とコンプライアンス ISO 26262/SOTIF準拠の証跡管理。モデルロールバック・フェイルセーフ戦略と組織・プロセスの整備。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}