problem R.–U. Börner1, F. Eckhofer2, and M. Helm2 1 Institute of Geophysics and Geoinformatics 2 Institute of Numerical Analysis and Optimization TU Bergakademie Freiberg (Germany) SIAM Conference on Mathematical and Computational Issues in the Geosciences Erlangen (Germany) · September 11-14, 2017
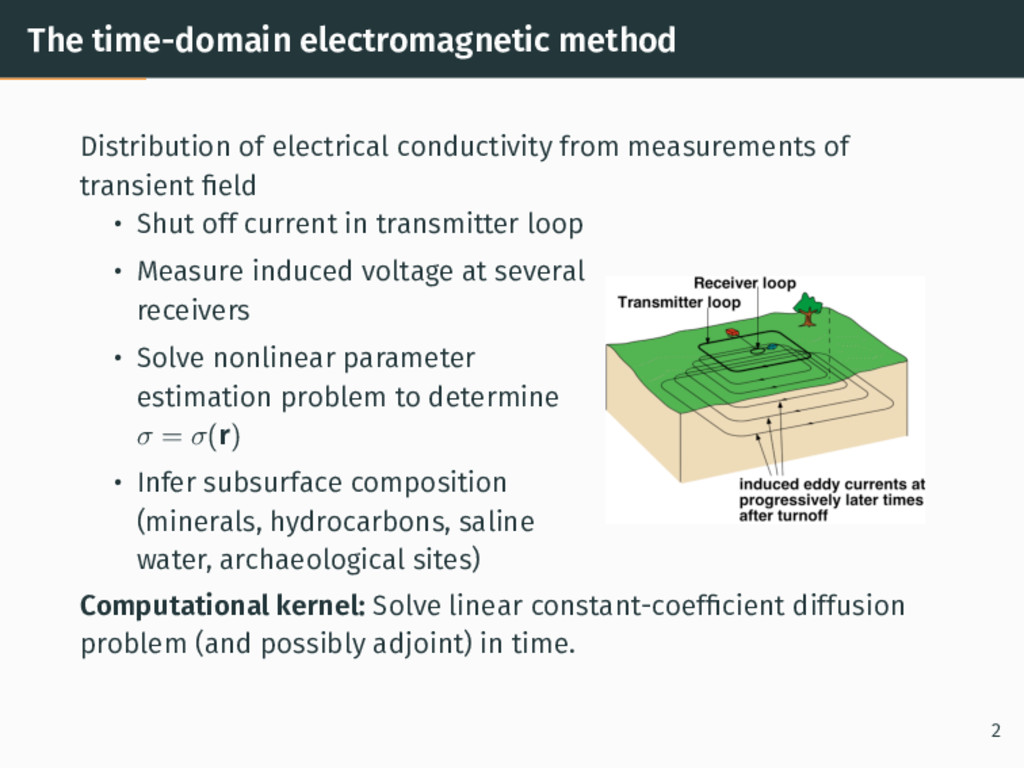
of transient field • Shut off current in transmitter loop • Measure induced voltage at several receivers • Solve nonlinear parameter estimation problem to determine σ = σ(r) • Infer subsurface composition (minerals, hydrocarbons, saline water, archaeological sites) Computational kernel: Solve linear constant-coefficient diffusion problem (and possibly adjoint) in time. 2
the electric field E = E(t, r): ∇ × µ−1 ∇ × E + σ(r)∂t E = 0 in (0, ∞) × Ω, Ω ⊂ R3 (1) E(0) = q(r) (2) E(t) = 0 on ∂Ω (3) Discretization in space yields semi-discretized system of ODEs Ku + M(σ)∂t u = 0, t > 0 (4) u(0) = b = M−1f (5) with the explicit solution u(t) = exp(−tM−1K)M−1f = exp(tA)b. (6) 3
m(r) which minimizes the functional Φ(m) = 1 2 nt ∑ j=1 ∥Quj(m) − dj∥2 + λ 2 ∥W(m)∥2 , (7) where • uj ∈ RN denotes model response at time tj , i.e., discretized electrical or magnetic fields • m ∈ RP denotes model parameters, e.g., mi = log(σi), i = 1, . . . , P • dj ∈ Rnobs denotes measured data at time tj • Q : RN → Rnobs maps numerical solution to observations • W ∈ RP×P denotes model roughness operator. 5
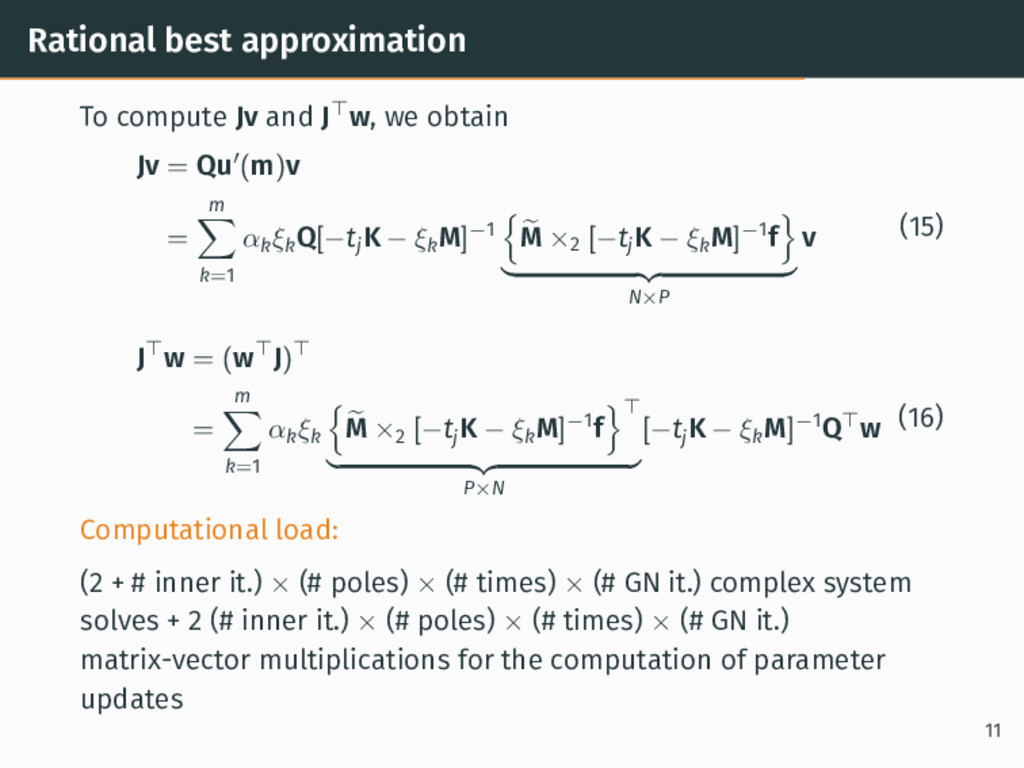
Φ(mk) = −∇Φ(mk), mk+1 = mk + ∆m, and arrive at [ J(mk)⊤J(mk) + λW⊤W ] ∆m = J(mk)⊤r(mk), (8) where J(mk) = Qu′(mk) and r = d − Qu(mk). The explicit forming of J(mk) should be avoided, since only products of the form Jv or J⊤w have to be computed when CG or LSQR-like methods are applied. We further have to differentiate the mass matrix, i.e., we need to compute and store M′(m). 6
of a discretization w.r.t. the parameter m yields M := [ ∂Mi,j(m) ∂mk ] 1≤i,j≤N,1≤k≤P , (9) which is a sparse N × N × P tensor. The P ”slices” are symmetric. M ×2 (·) denotes multiplication along the 2nd dimension of M, result is an N × P matrix. Since mass matrix M is linear in m, the tensor M remains constant during the whole Gauss-Newton iteration! 7
to compute u and u′: 1. Time stepping schemes, e.g., Implicit Euler working on ODE system 2. Best approximation techniques working on exp(tA)b directly Krylov methods not considered, since computing u′ is highly non-trivial and not well understood. 8
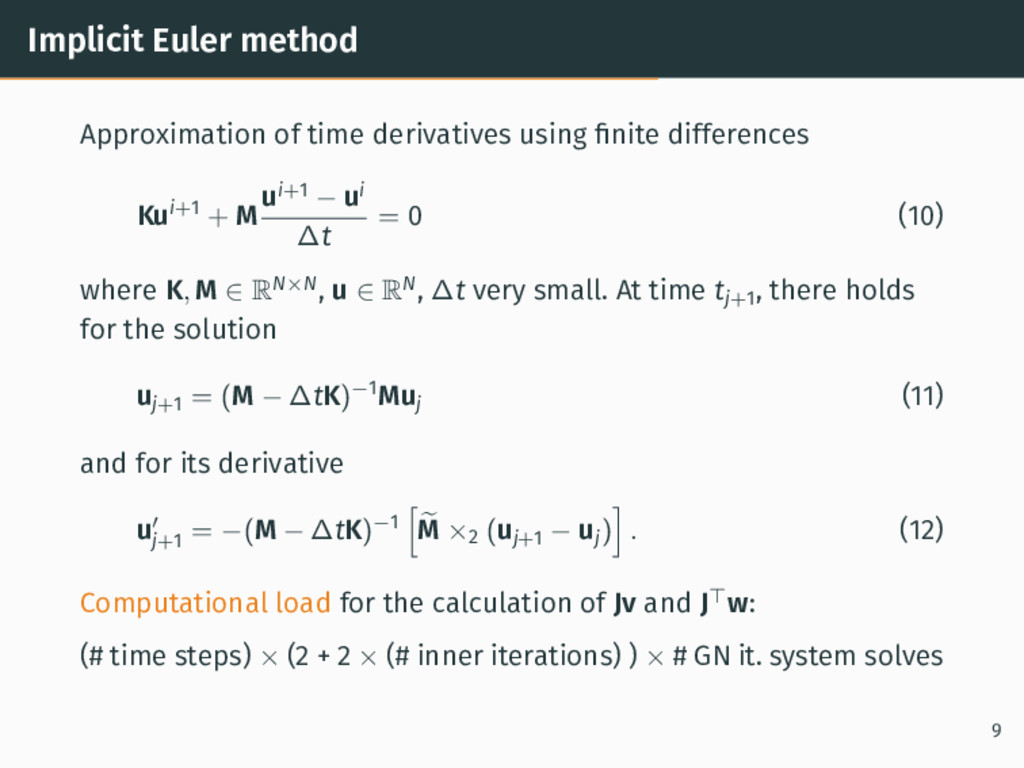
Kui+1 + M ui+1 − ui ∆t = 0 (10) where K, M ∈ RN×N, u ∈ RN, ∆t very small. At time tj+1 , there holds for the solution uj+1 = (M − ∆tK)−1Muj (11) and for its derivative u′ j+1 = −(M − ∆tK)−1 [ M ×2 (uj+1 − uj) ] . (12) Computational load for the calculation of Jv and J⊤w: (# time steps) × (2 + 2 × (# inner iterations) ) × # GN it. system solves 9
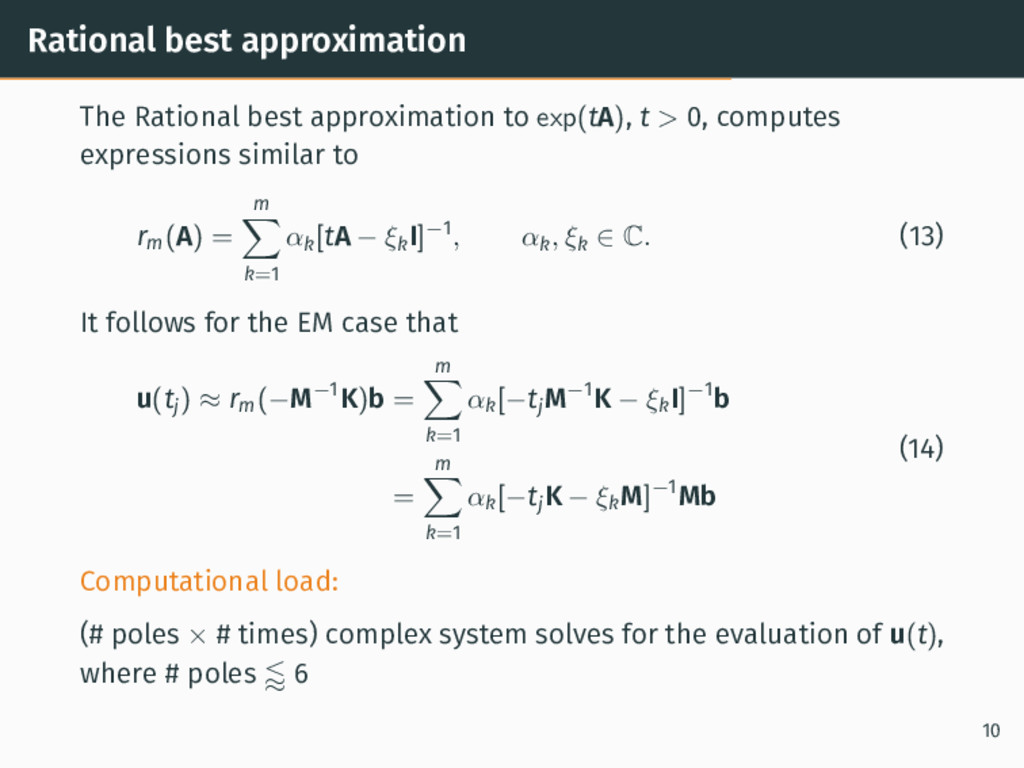
> 0, computes expressions similar to rm(A) = m ∑ k=1 αk[tA − ξk I]−1 , αk, ξk ∈ C. (13) It follows for the EM case that u(tj) ≈ rm(−M−1K)b = m ∑ k=1 αk[−tj M−1K − ξk I]−1b = m ∑ k=1 αk[−tj K − ξk M]−1Mb (14) Computational load: (# poles × # times) complex system solves for the evaluation of u(t), where # poles ⪅ 6 10
to stability requirements (small ∆t) • solution of many linear systems required • sequential coupling between time steps Best approximation • linear system solves only for few complex poles and desired times • no discretization in time required • summation over (# poles) terms is fully parallelizable • cache/distribute LU factors 12
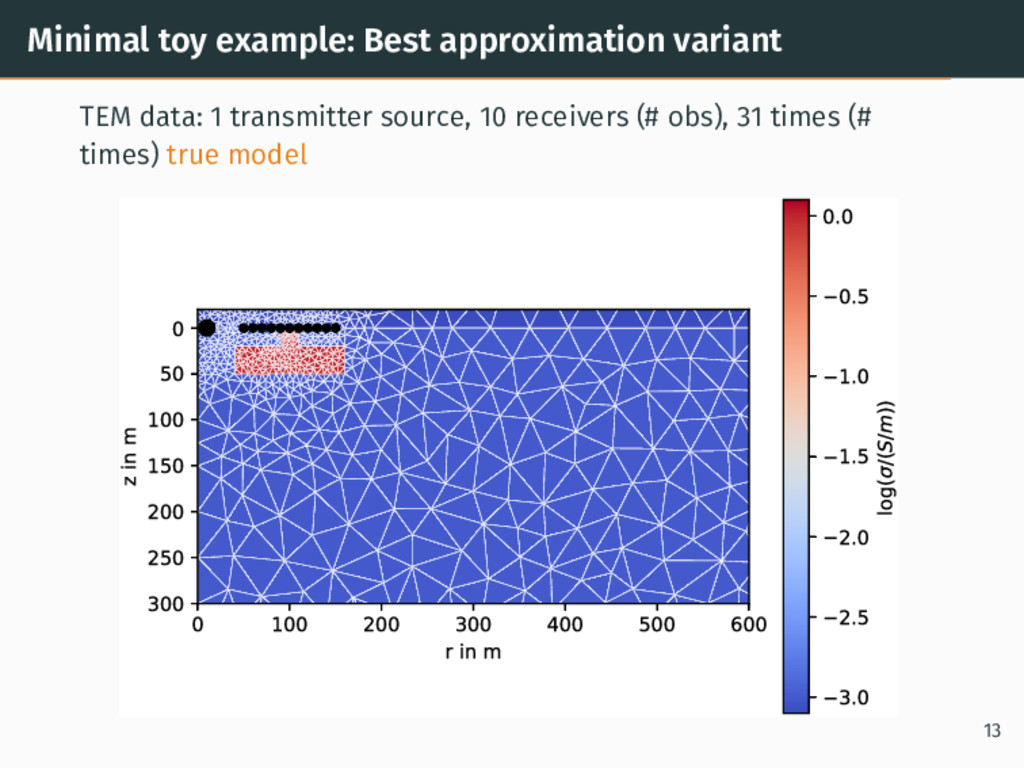
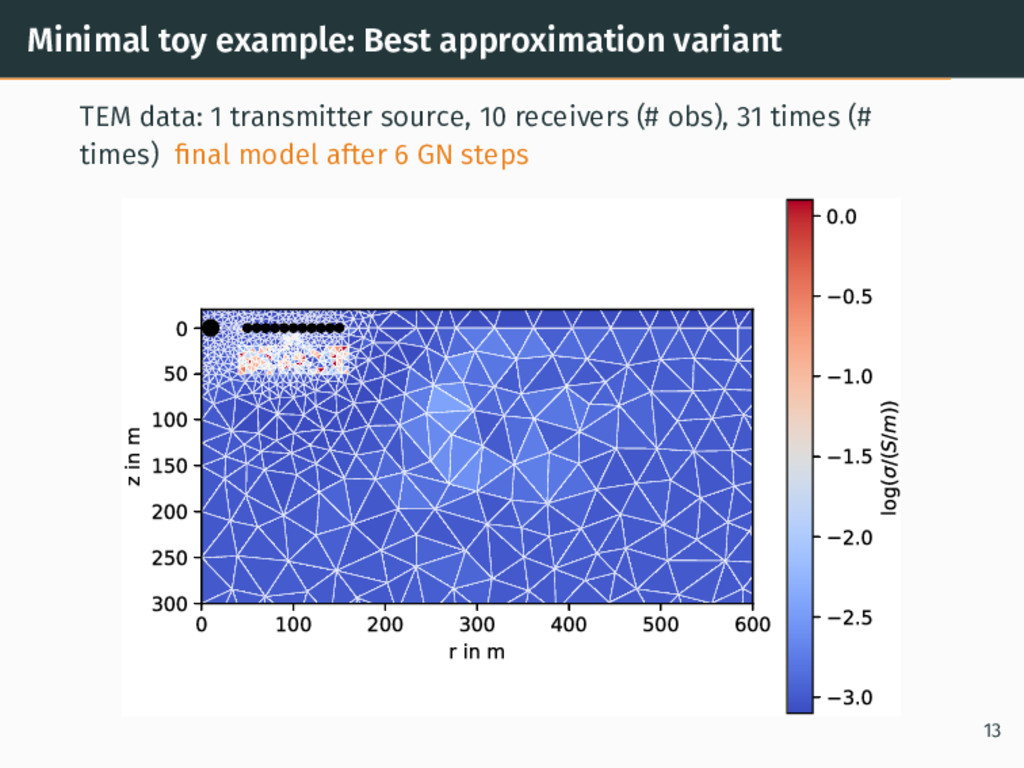
source, 10 receivers (# obs), 31 times (# times) final model after 6 GN steps 0 100 200 300 400 500 600 r in m 0 50 100 150 200 250 300 z in m 3.0 2.5 2.0 1.5 1.0 0.5 0.0 log( /(S/m)) 13
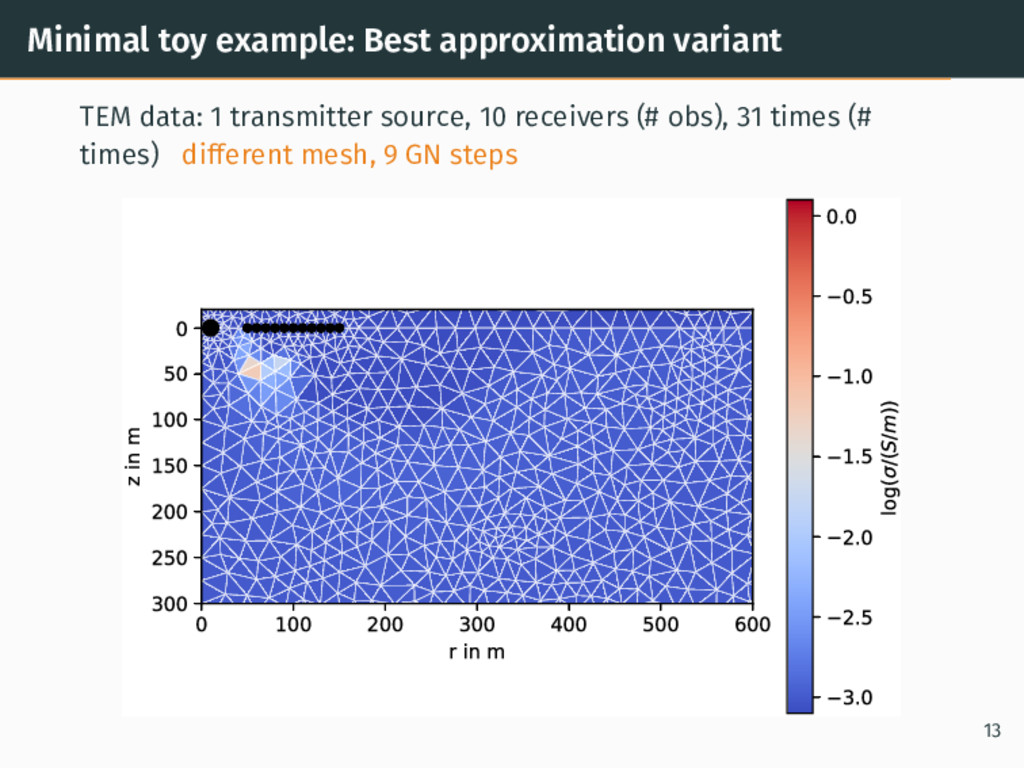
source, 10 receivers (# obs), 31 times (# times) different mesh, 9 GN steps 0 100 200 300 400 500 600 r in m 0 50 100 150 200 250 300 z in m 3.0 2.5 2.0 1.5 1.0 0.5 0.0 log( /(S/m)) 13
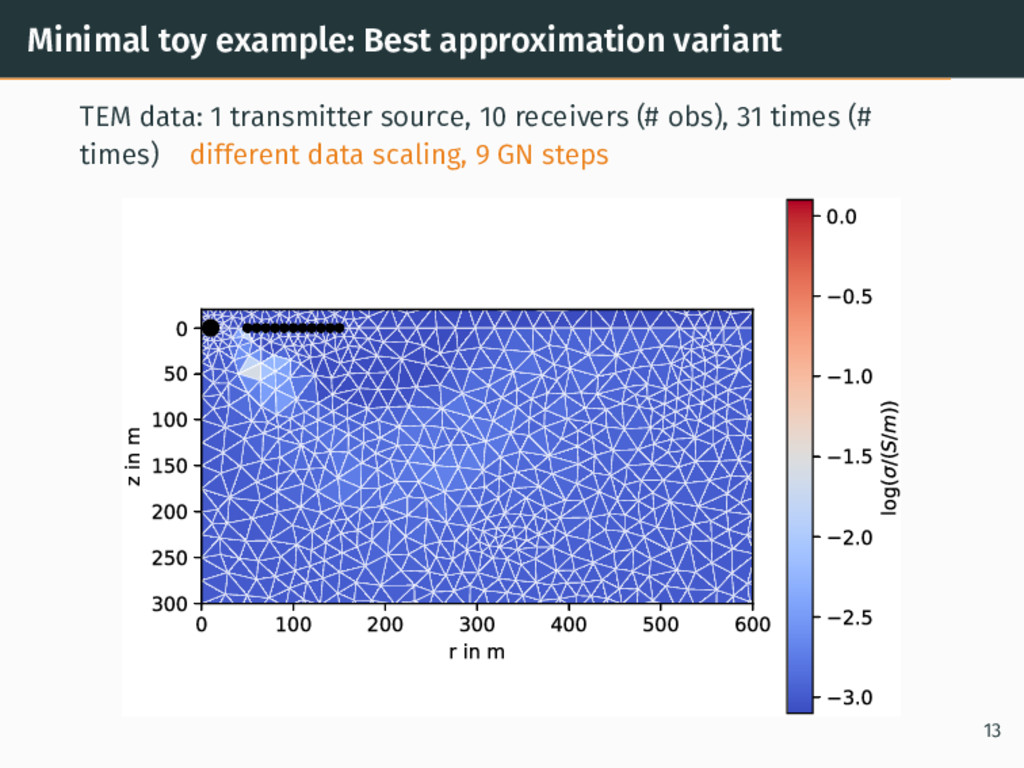
source, 10 receivers (# obs), 31 times (# times) different data scaling, 9 GN steps 0 100 200 300 400 500 600 r in m 0 50 100 150 200 250 300 z in m 3.0 2.5 2.0 1.5 1.0 0.5 0.0 log( /(S/m)) 13
small time steps and coupling between times • Best approximation superior due to comparably small number of system solves • Best approximation scheme fully parallelizable • Excellent model reconstruction for heat equation problems w/ many data Things that need further research: • Effects of poor spatial data coverage • High dynamic range of EM data poses problems in data scaling within inversion • Preconditioner for LSQR 14
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Example: Distribution of ∂t Bz(t) = −[∇ × E(t)]z Homogeneous](https://files.speakerdeck.com/presentations/363a2d2a24c8451aaed946e11b21aea1/slide_5.jpg){kind=link}
![Example: Distribution of ∂t Bz(t) = −[∇ × E(t)]z Homogeneous](https://files.speakerdeck.com/presentations/363a2d2a24c8451aaed946e11b21aea1/slide_6.jpg){kind=link}
![Example: Distribution of ∂t Bz(t) = −[∇ × E(t)]z Homogeneous](https://files.speakerdeck.com/presentations/363a2d2a24c8451aaed946e11b21aea1/slide_7.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}