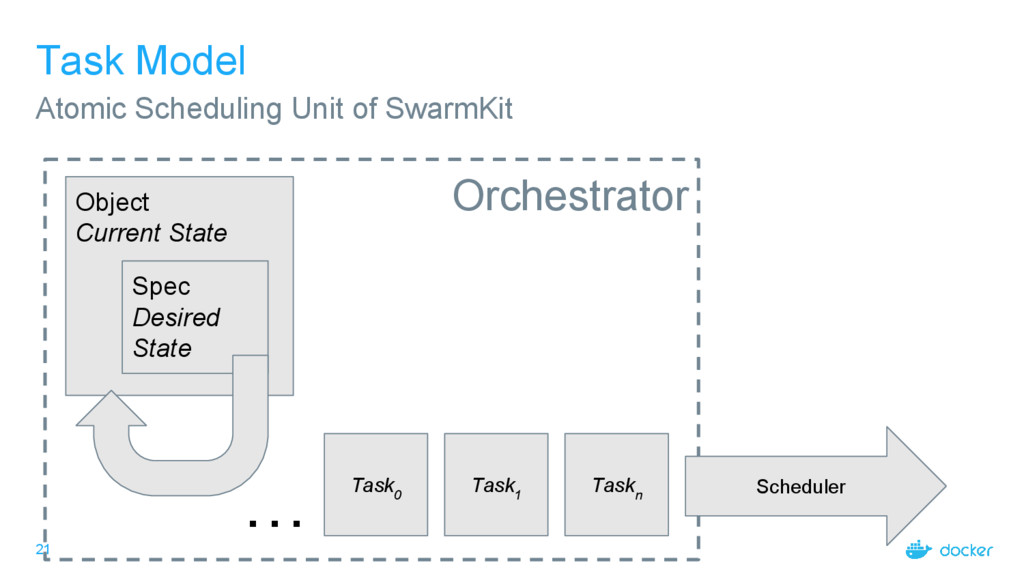
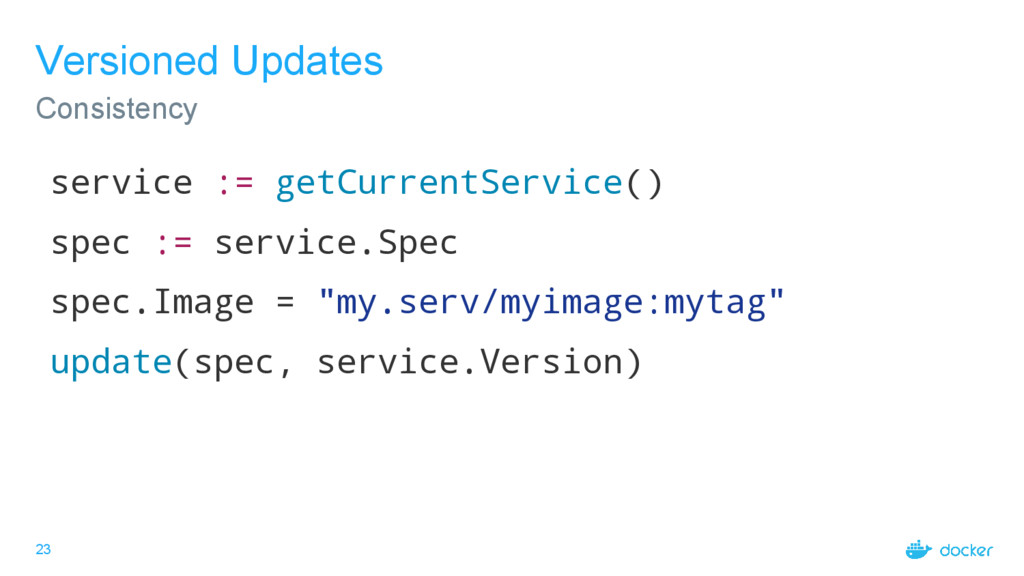
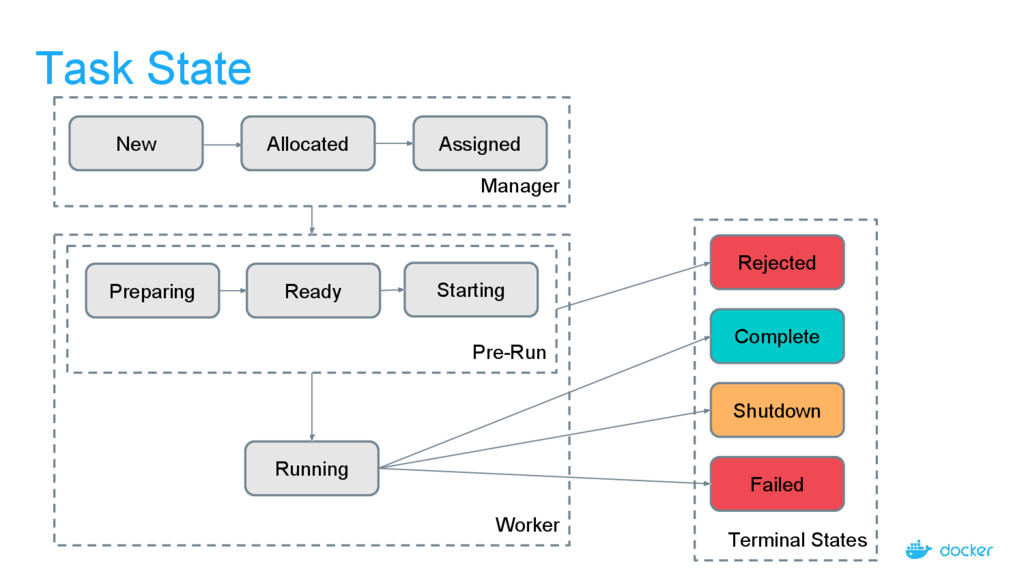
SwarmKit is a new framework by Docker for building orchestration systems that powers Docker Engine's orchestration capabilities. In this talk, we'll dive into the model driven design and how the components fit together to build a user friendly orchestration system. Solving problems such as reconciliation, convergence and consistency at the model level ensure the system can evolve to meet modern use cases needed in orchestration applications. This approach leads to a simplified model that can reliably orchestrate complex deployments. Show me your data structures and I'll show you your orchestration system.
From ContainerCon EU 2016.
Docker Swarm Mode (https://docs.docker.com/engine/swarm/)
Docker SwarmKit (https://github.com/docker/swarmkit)
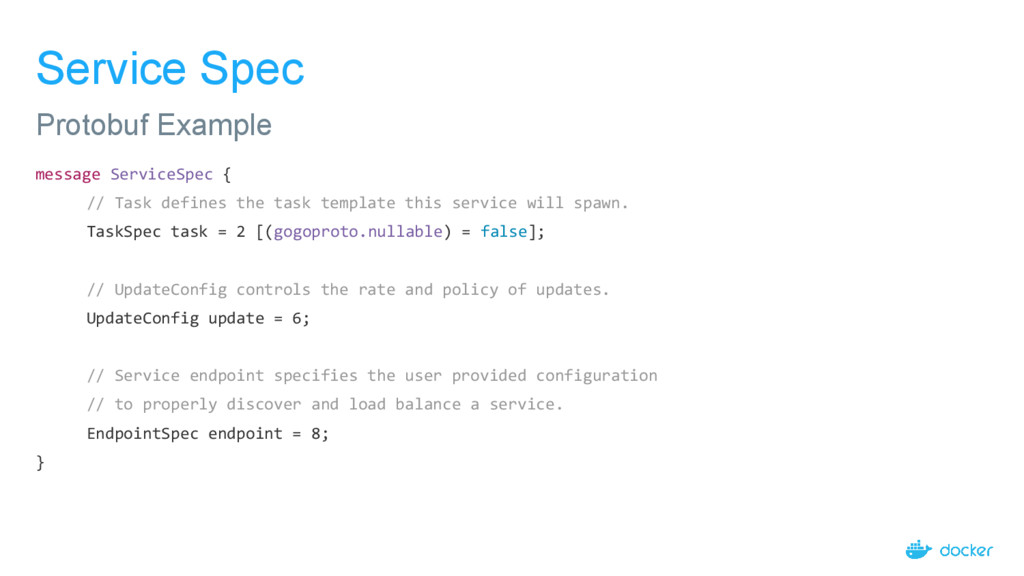
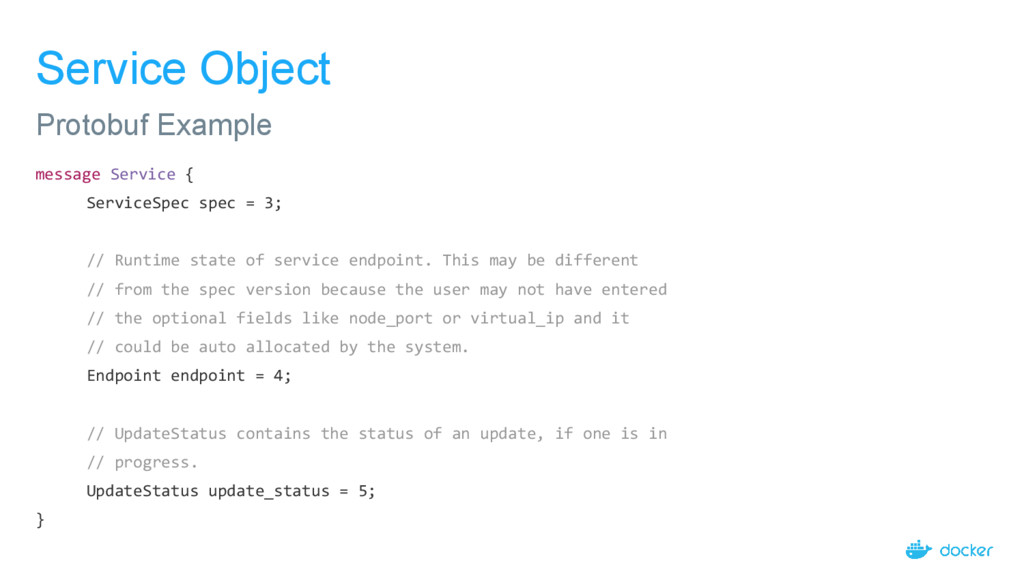
Docker SwarmKit Protobufs/GRPC (https://github.com/docker/swarmkit/tree/master/api)
Borg Paper (http://static.googleusercontent.com/media/research.google.com/en//pubs/archive/43438.pdf)
Raft Consensus Algorithm (https://raft.github.io/)
Control Theory (https://en.wikipedia.org/wiki/Control_theory)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}