The design of SwarmKit's object model minimizes problems that commonly occur in distributed orchestration systems. Slides from Docker's Distributed Systems Summit in Berlin.
Docker Swarm Mode (https://docs.docker.com/engine/swarm/)
Docker SwarmKit (https://github.com/docker/swarmkit)
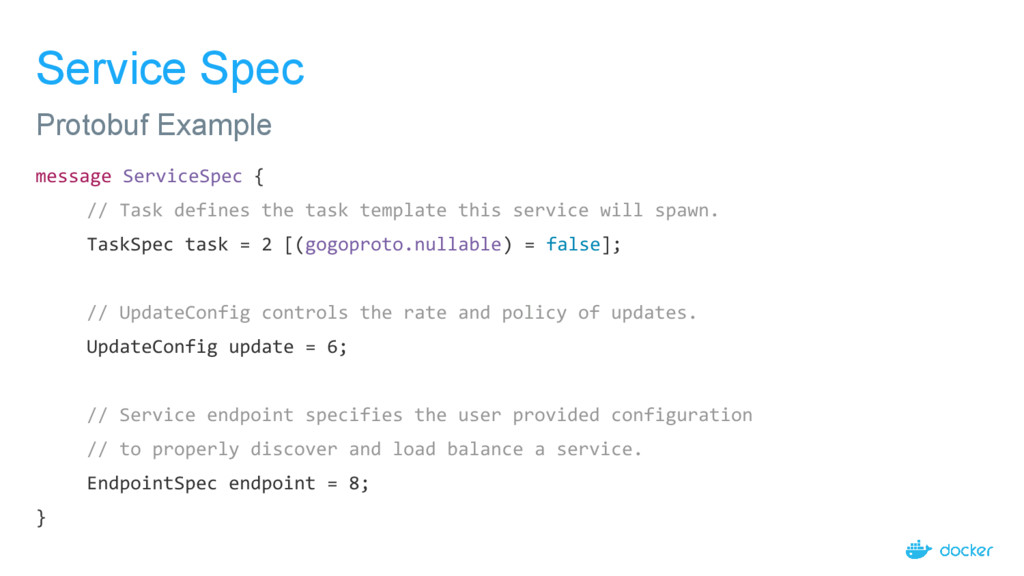
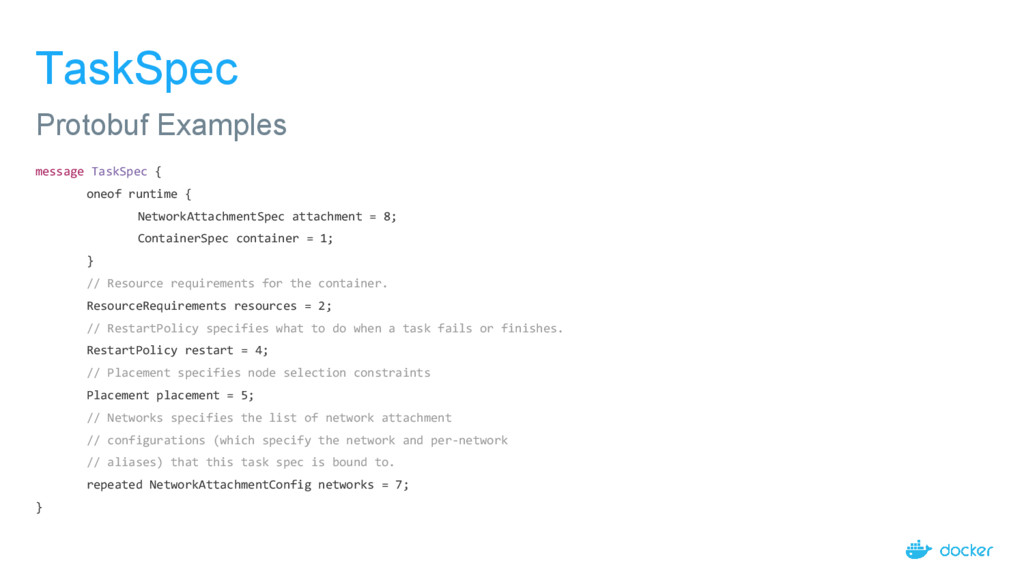
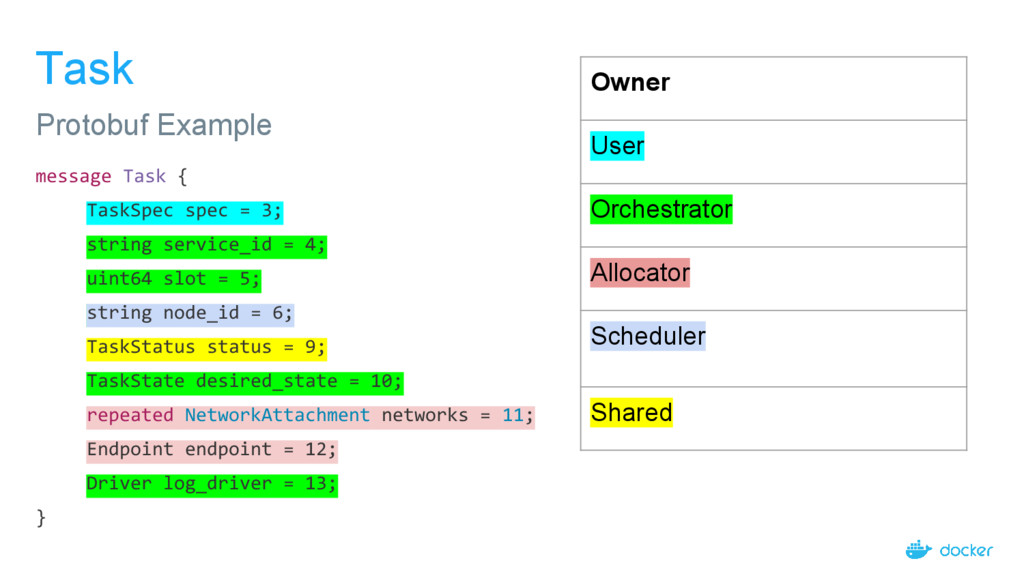
Docker SwarmKit Protobufs/GRPC (https://github.com/docker/swarmkit/tree/master/api)
Borg Paper (http://static.googleusercontent.com/media/research.google.com/en//pubs/archive/43438.pdf)
Raft Consensus Algorithm (https://raft.github.io/)
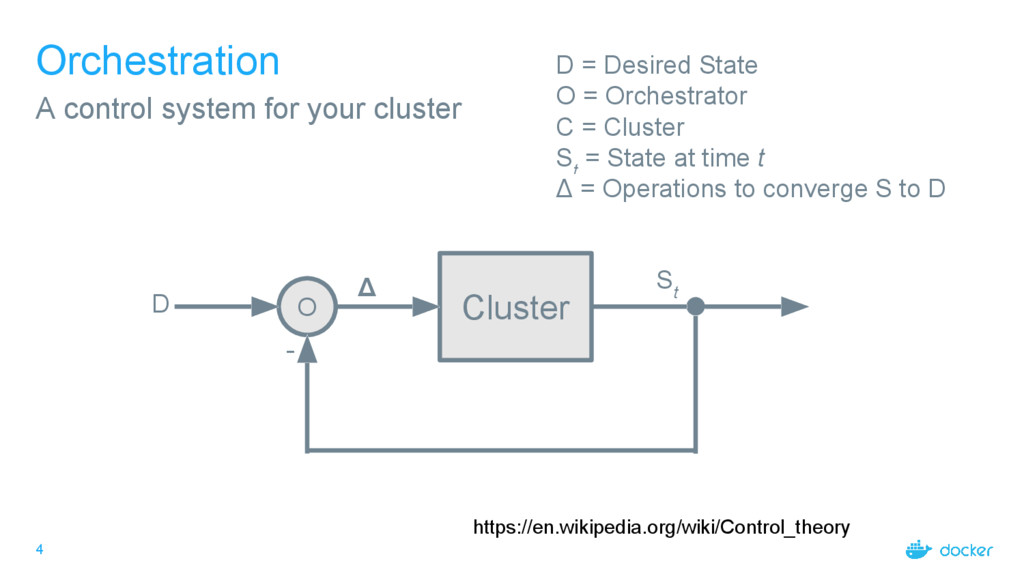
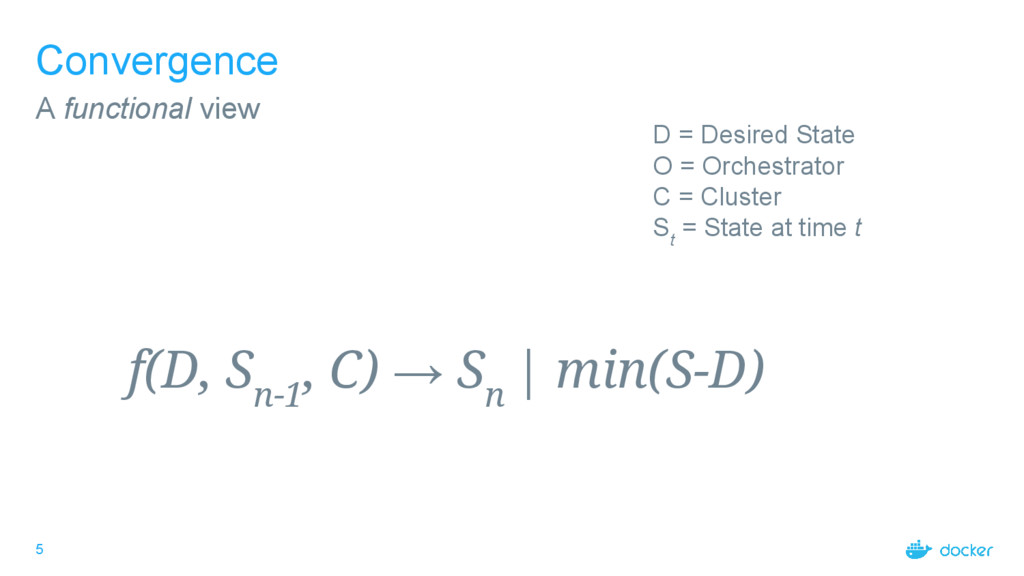
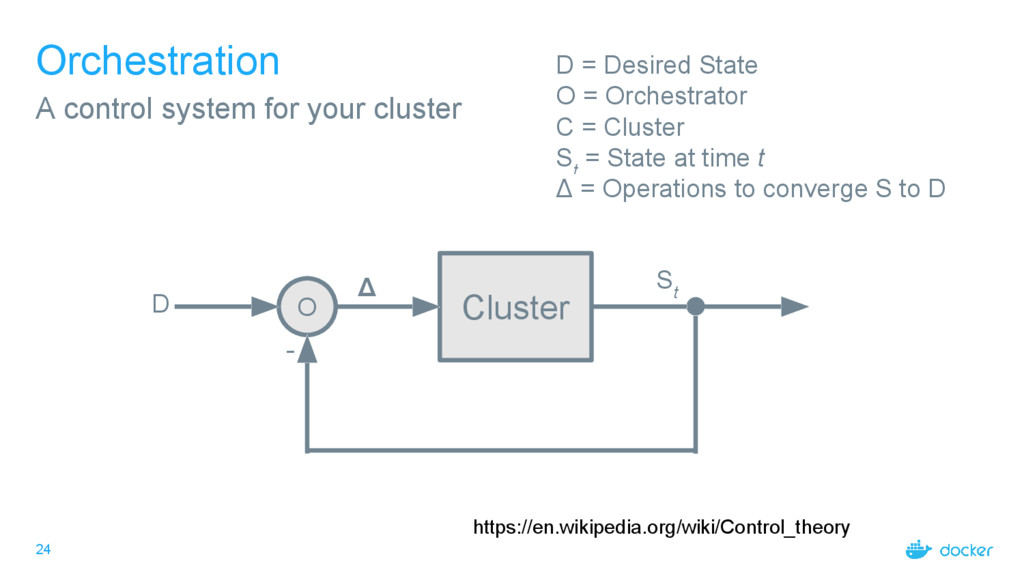
Control Theory (https://en.wikipedia.org/wiki/Control_theory)
{kind=link}
![Stephen Day Docker, Inc. [email protected] github.com/stevvooe @stevvooe](https://files.speakerdeck.com/presentations/7afe52f154794569bd795f2019992b39/slide_1.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}