Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
【GenSparkお試し】kaggle CMI3 overview
Search
suguuuuuすぐー
June 21, 2025
300
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
【GenSparkお試し】kaggle CMI3 overview
chatGPTでまとめ→md出力→genspark
って流れ。
suguuuuuすぐー
June 21, 2025
More Decks by suguuuuuすぐー
See All by suguuuuuすぐー
チャンスの平等性ってなんだろな?をベイズで見てみる
sugupoko
0
28
成長速度を上げる「場」のつくり方(本に詳しく書いてあるよ、読んでね!!)
sugupoko
1
550
小さいから、全部わかる。— 常駐AI "xangi" のすすめ
sugupoko
0
430
kaggle Vesuvius Challenge - Surface Detection速報まとめ
sugupoko
0
320
20260117 第5回 関東kaggler会 LT キャリアを考えるために・・・
sugupoko
1
1.1k
kaggle 実験管理術 v2.0 w/ claude code(レポジトリ公開)
sugupoko
0
620
関西Kaggler会_交流会_in_Osaka2025#1
sugupoko
0
78
【gensparkお試し、内容未確認】kaggle Bird+ CLEF2025解法まとめ
sugupoko
0
170
20250515_今更ながら2023年に参加したHuBMAP金ソリューションを綺麗にまとめ
sugupoko
0
270
Featured
See All Featured
Let's Do A Bunch of Simple Stuff to Make Websites Faster
chriscoyier
508
140k
StorybookのUI Testing Handbookを読んだ
zakiyama
31
6.9k
Beyond borders and beyond the search box: How to win the global "messy middle" with AI-driven SEO
davidcarrasco
3
190
Rebuilding a faster, lazier Slack
samanthasiow
85
9.6k
The Art of Programming - Codeland 2020
erikaheidi
57
14k
Gemini Prompt Engineering: Practical Techniques for Tangible AI Outcomes
mfonobong
2
470
4 Signs Your Business is Dying
shpigford
187
22k
"I'm Feeling Lucky" - Building Great Search Experiences for Today's Users (#IAC19)
danielanewman
230
23k
Ten Tips & Tricks for a 🌱 transition
stuffmc
0
160
Visual Storytelling: How to be a Superhuman Communicator
reverentgeek
2
600
Tips & Tricks on How to Get Your First Job In Tech
honzajavorek
1
630
[SF Ruby Conf 2025] Rails X
palkan
2
1.2k
Transcript
発表者: [ あなたのお名前] [ 所属] CMI
センサーデータ行動検出コンペティショ ン Kaggle 『CMI - Detect Behavior with Sensor Data 』技術プレゼンテーション 主催: Child Mind Institute / Kaggle 2025 年6 月21 日 Genspark で作成
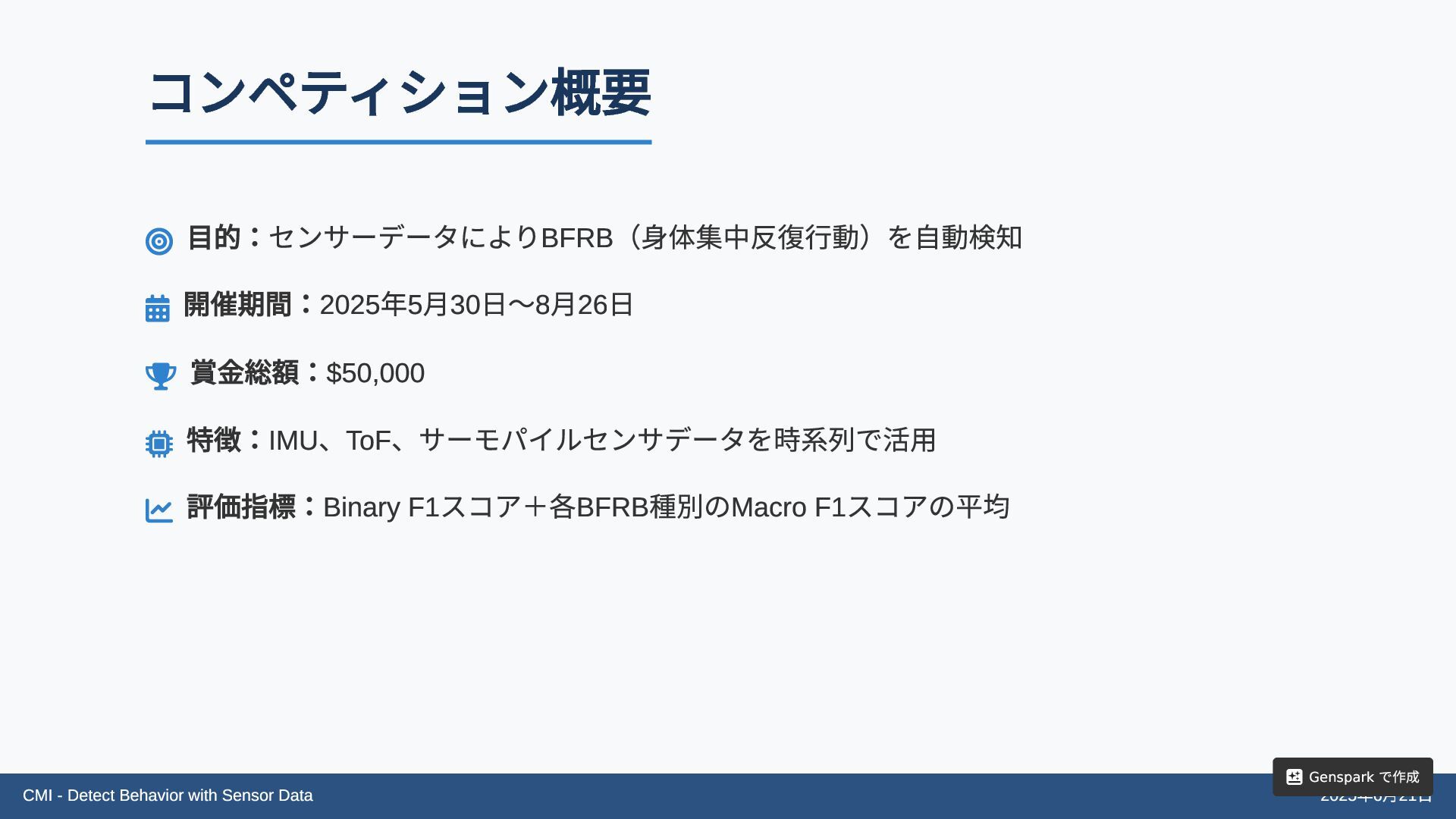
コンペティション概要 目的:センサーデータによりBFRB (身体集中反復行動)を自動検知 開催期間:2025 年5 月30 日~8 月26
日 賞金総額:$50,000 特徴:IMU 、ToF 、サーモパイルセンサデータを時系列で活用 評価指標:Binary F1 スコア+各BFRB 種別のMacro F1 スコアの平均 CMI - Detect Behavior with Sensor Data 2025 年6 月21 日 Genspark で作成
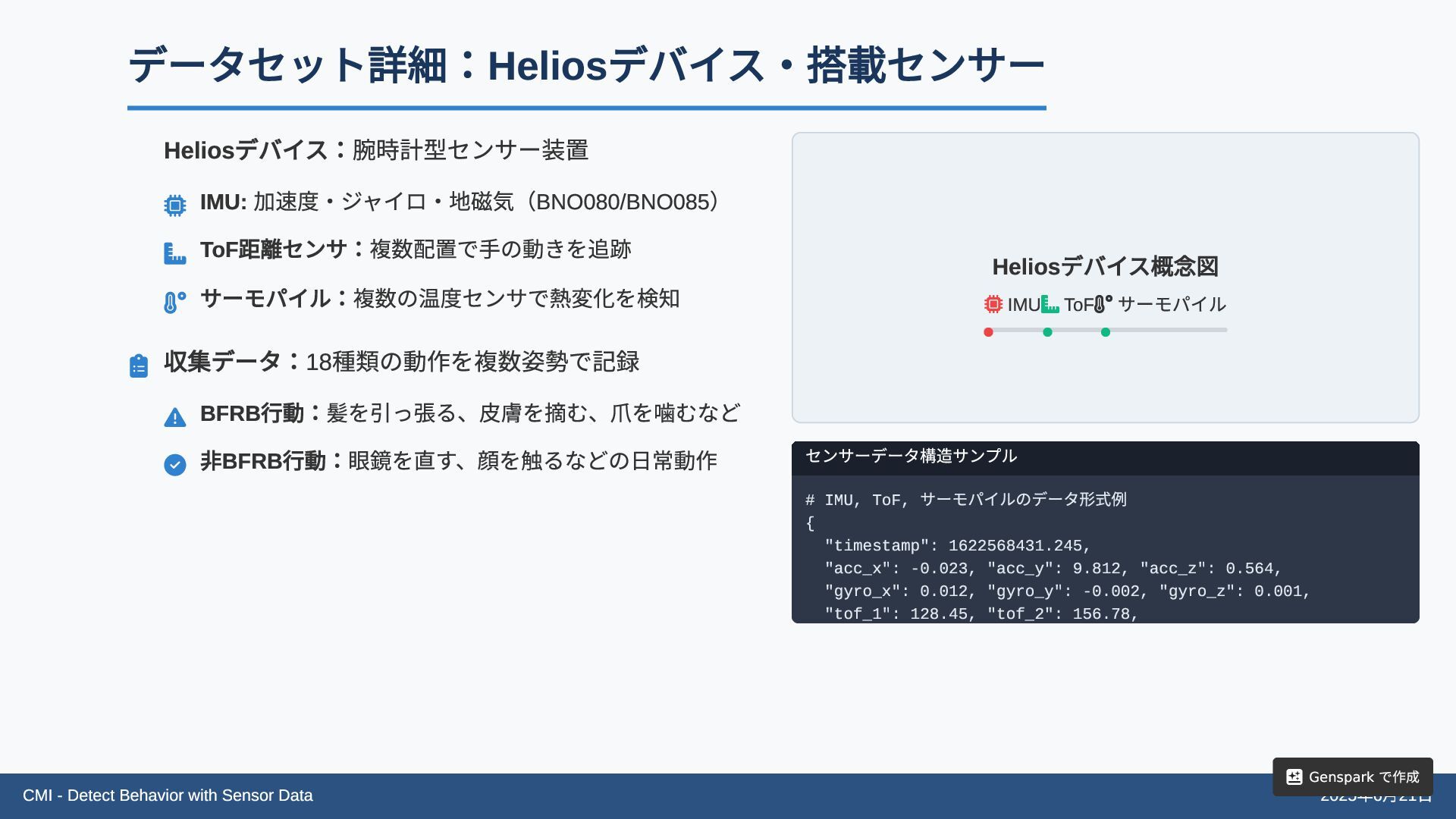
データセット詳細:Helios デバイス・搭載センサー Helios デバイス:腕時計型センサー装置 IMU: 加速度・ジャイロ・地磁気(BNO080/BNO085 ) ToF
距離センサ:複数配置で手の動きを追跡 サーモパイル:複数の温度センサで熱変化を検知 収集データ:18 種類の動作を複数姿勢で記録 BFRB 行動:髪を引っ張る、皮膚を摘む、爪を噛むなど 非BFRB 行動:眼鏡を直す、顔を触るなどの日常動作 Helios デバイス概念図 IMU ToF サーモパイル センサーデータ構造サンプル # IMU, ToF, サーモパイルのデータ形式例 { "timestamp": 1622568431.245, "acc_x": -0.023, "acc_y": 9.812, "acc_z": 0.564, "gyro_x": 0.012, "gyro_y": -0.002, "gyro_z": 0.001, "tof_1": 128.45, "tof_2": 156.78, CMI - Detect Behavior with Sensor Data 2025 年6 月21 日 Genspark で作成
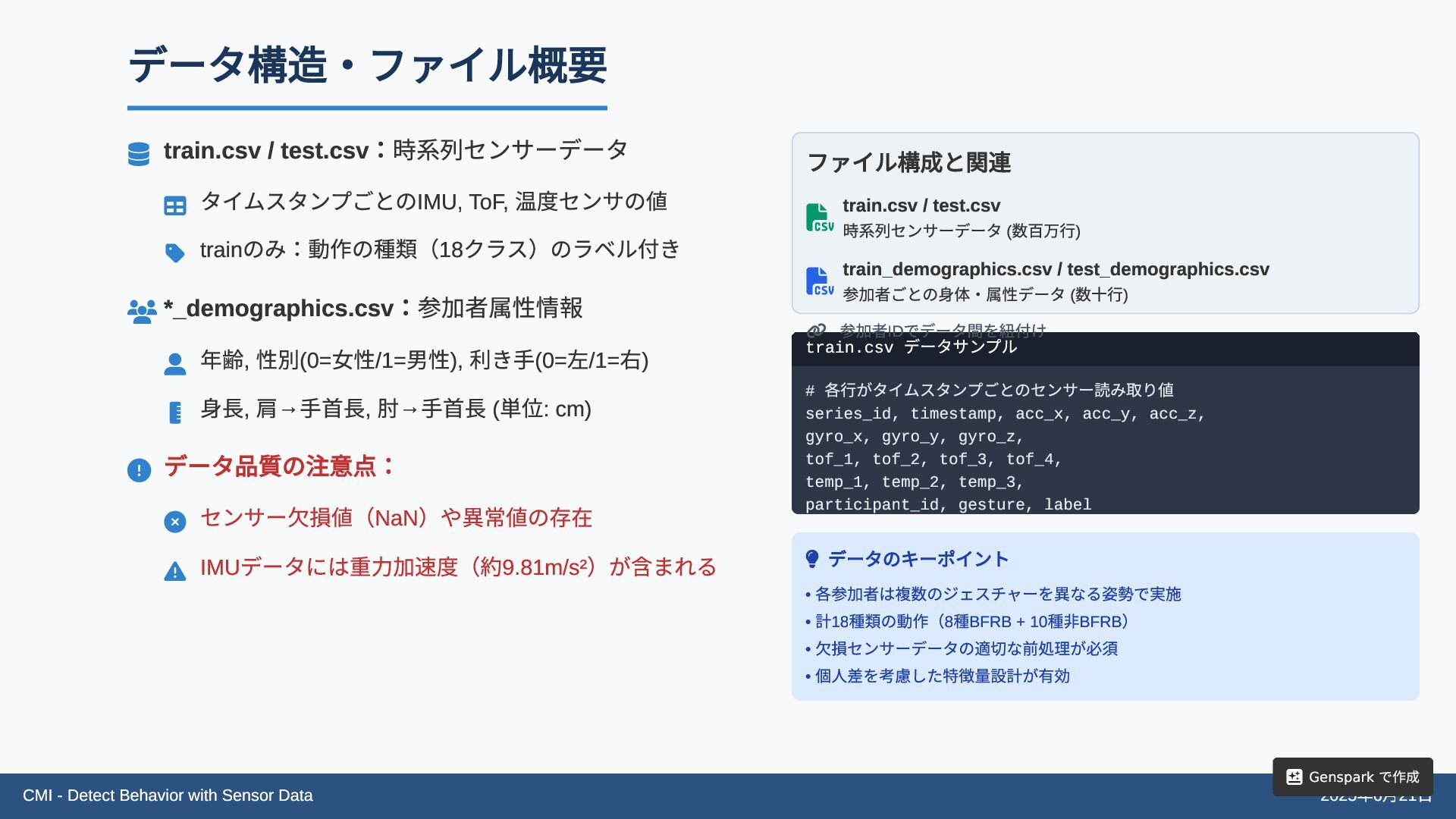
データ構造・ファイル概要 train.csv / test.csv :時系列センサーデータ タイムスタンプごとのIMU, ToF, 温度センサの値
train のみ:動作の種類(18 クラス)のラベル付き *_demographics.csv :参加者属性情報 年齢, 性別(0= 女性/1= 男性), 利き手(0= 左/1= 右) 身長, 肩→ 手首長, 肘→ 手首長 ( 単位: cm) データ品質の注意点: センサー欠損値(NaN )や異常値の存在 IMU データには重力加速度(約9.81m/s² )が含まれる ファイル構成と関連 train.csv / test.csv 時系列センサーデータ ( 数百万行) train_demographics.csv / test_demographics.csv 参加者ごとの身体・属性データ ( 数十行) 参加者ID でデータ間を紐付け train.csv データサンプル # 各行がタイムスタンプごとのセンサー読み取り値 series_id, timestamp, acc_x, acc_y, acc_z, gyro_x, gyro_y, gyro_z, tof_1, tof_2, tof_3, tof_4, temp_1, temp_2, temp_3, participant_id, gesture, label データのキーポイント • 各参加者は複数のジェスチャーを異なる姿勢で実施 • 計18 種類の動作(8 種BFRB + 10 種非BFRB ) • 欠損センサーデータの適切な前処理が必須 • 個人差を考慮した特徴量設計が有効 CMI - Detect Behavior with Sensor Data 2025 年6 月21 日 Genspark で作成
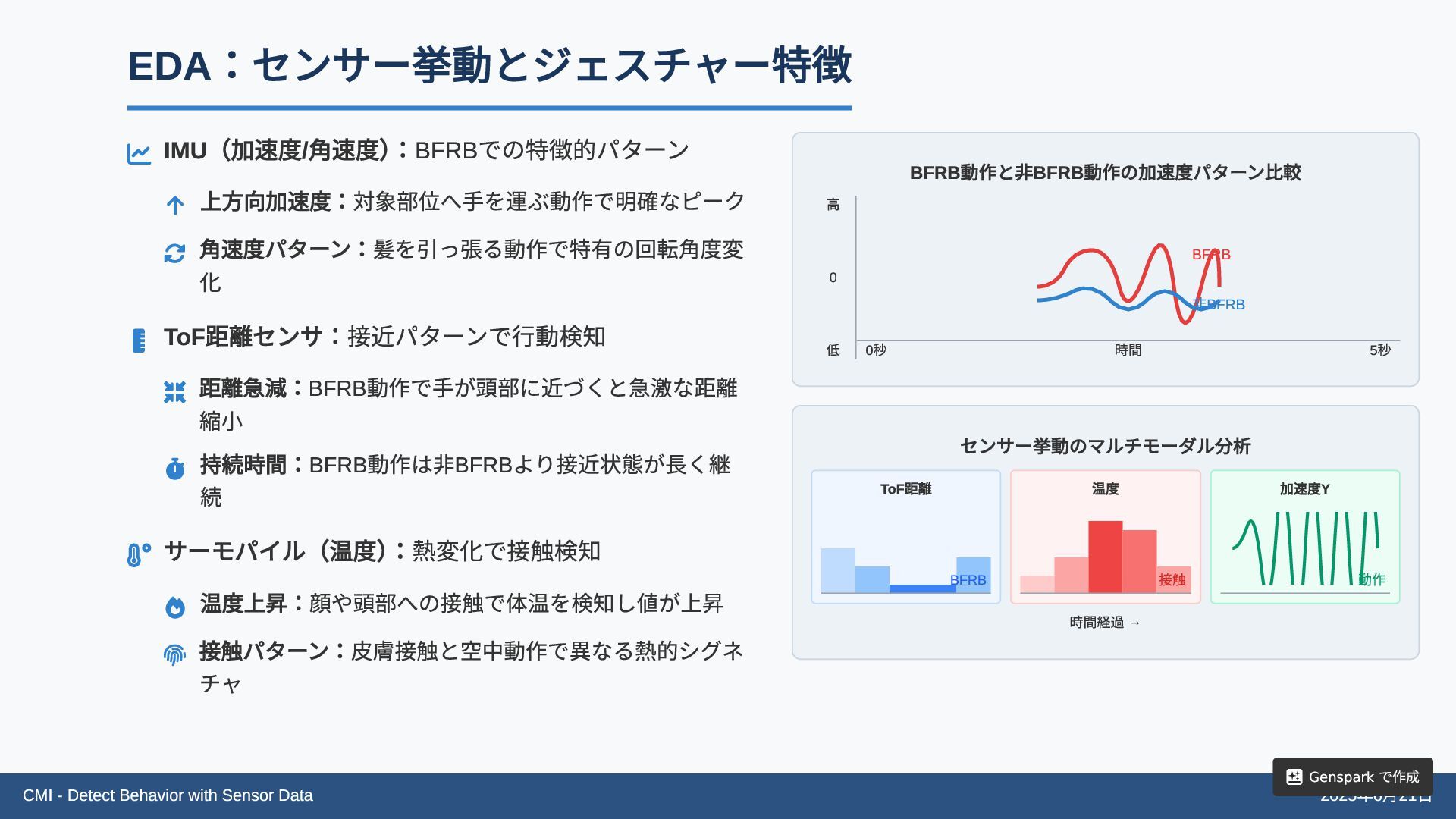
EDA :センサー挙動とジェスチャー特徴 IMU (加速度/ 角速度) :BFRB での特徴的パターン 上方向加速度:対象部位へ手を運ぶ動作で明確なピーク
角速度パターン:髪を引っ張る動作で特有の回転角度変 化 ToF 距離センサ:接近パターンで行動検知 距離急減:BFRB 動作で手が頭部に近づくと急激な距離 縮小 持続時間:BFRB 動作は非BFRB より接近状態が長く継 続 サーモパイル(温度) :熱変化で接触検知 温度上昇:顔や頭部への接触で体温を検知し値が上昇 接触パターン:皮膚接触と空中動作で異なる熱的シグネ チャ BFRB 動作と非BFRB 動作の加速度パターン比較 センサー挙動のマルチモーダル分析 ToF 距離 温度 加速度Y 時間経過 → 高 0 低 0 秒 時間 5 秒 BFRB 非BFRB BFRB 接触 動作 CMI - Detect Behavior with Sensor Data 2025 年6 月21 日 Genspark で作成
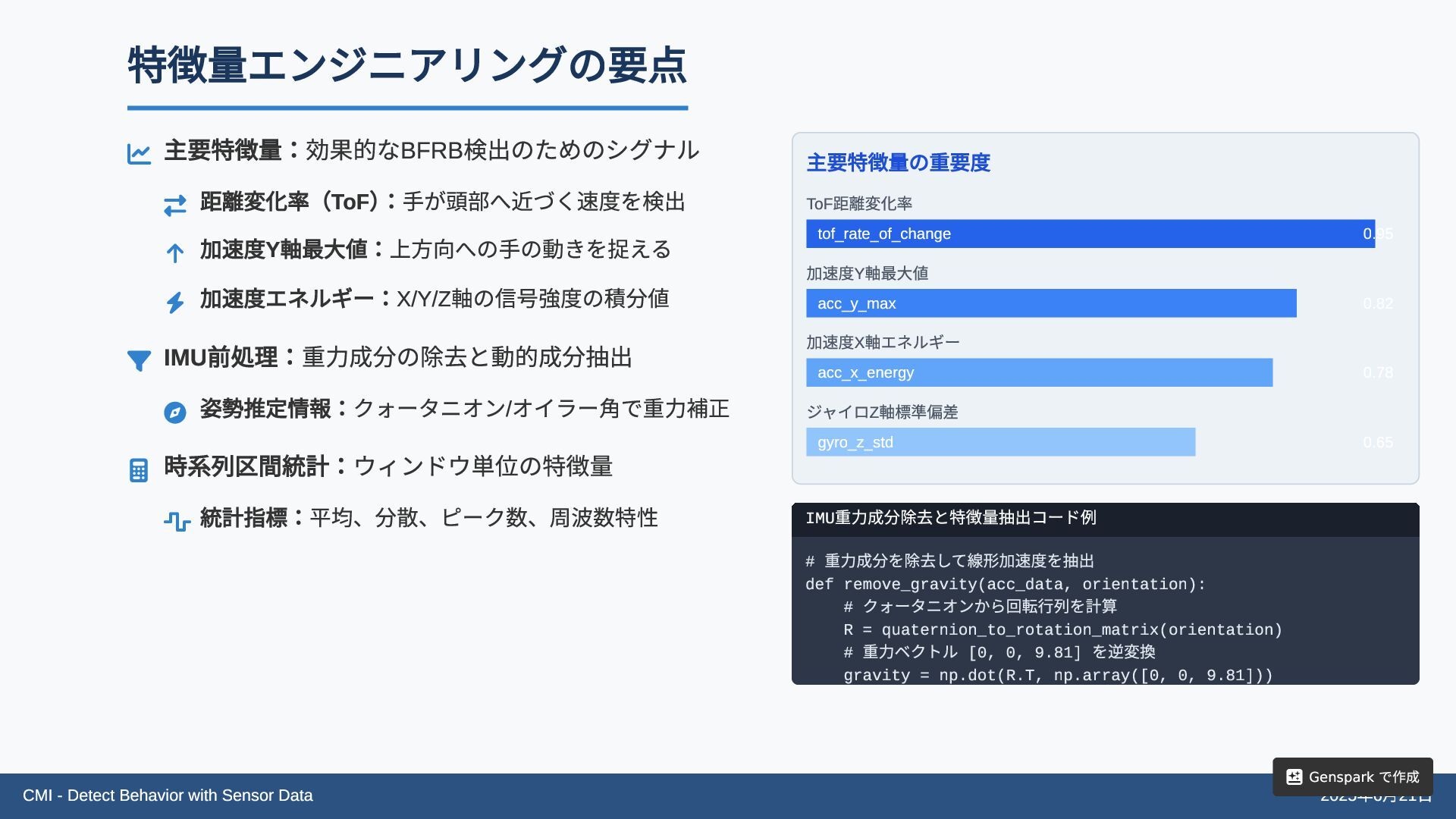
特徴量エンジニアリングの要点 主要特徴量:効果的なBFRB 検出のためのシグナル 距離変化率(ToF ) :手が頭部へ近づく速度を検出 加速度Y
軸最大値:上方向への手の動きを捉える 加速度エネルギー:X/Y/Z 軸の信号強度の積分値 IMU 前処理:重力成分の除去と動的成分抽出 姿勢推定情報:クォータニオン/ オイラー角で重力補正 時系列区間統計:ウィンドウ単位の特徴量 統計指標:平均、分散、ピーク数、周波数特性 主要特徴量の重要度 ToF 距離変化率 加速度Y 軸最大値 加速度X 軸エネルギー ジャイロZ 軸標準偏差 IMU重力成分除去と特徴量抽出コード例 # 重力成分を除去して線形加速度を抽出 def remove_gravity(acc_data, orientation): # クォータニオンから回転行列を計算 R = quaternion_to_rotation_matrix(orientation) # 重力ベクトル [0, 0, 9.81] を逆変換 gravity = np.dot(R.T, np.array([0, 0, 9.81])) CMI - Detect Behavior with Sensor Data 2025 年6 月21 日 tof_rate_of_change 0.95 acc_y_max 0.82 acc_x_energy 0.78 gyro_z_std 0.65 Genspark で作成
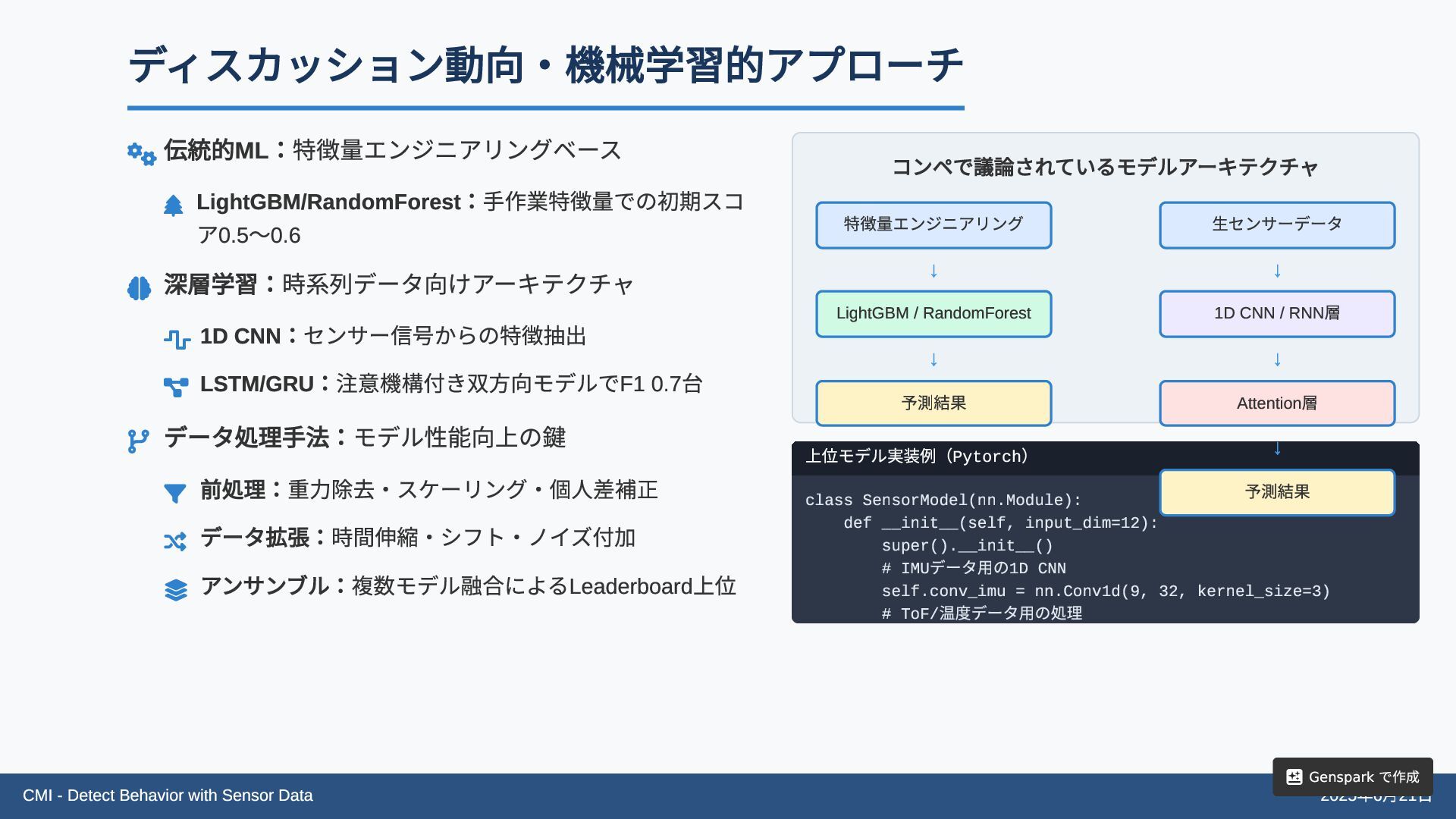
ディスカッション動向・機械学習的アプローチ 伝統的ML :特徴量エンジニアリングベース LightGBM/RandomForest :手作業特徴量での初期スコ ア0.5 〜0.6
深層学習:時系列データ向けアーキテクチャ 1D CNN :センサー信号からの特徴抽出 LSTM/GRU :注意機構付き双方向モデルでF1 0.7 台 データ処理手法:モデル性能向上の鍵 前処理:重力除去・スケーリング・個人差補正 データ拡張:時間伸縮・シフト・ノイズ付加 アンサンブル:複数モデル融合によるLeaderboard 上位 コンペで議論されているモデルアーキテクチャ 特徴量エンジニアリング ↓ LightGBM / RandomForest ↓ 予測結果 生センサーデータ ↓ 1D CNN / RNN 層 ↓ Attention 層 ↓ 予測結果 上位モデル実装例(Pytorch) class SensorModel(nn.Module): def __init__(self, input_dim=12): super().__init__() # IMUデータ用の1D CNN self.conv_imu = nn.Conv1d(9, 32, kernel_size=3) # ToF/温度データ用の処理 CMI - Detect Behavior with Sensor Data 2025 年6 月21 日 Genspark で作成
技術的課題と今後の展望 技術的課題:センサー間同期、個人差補正、ノイズ除去、欠損データ処理 評価指標最適化:Binary F1 とMacro F1 のバランス、クラス不均衡対策
実運用へ向けて:一般化性能、エッジデバイス実装、省電力化、リアルタイム処理 解釈性向上:医療関係者・ユーザーへの説明可能な検出アルゴリズム開発 現状のベストプラクティス:マルチモーダル特徴抽出、センサー融合、深層学習 CMI - Detect Behavior with Sensor Data 2025 年6 月21 日 Genspark で作成
![発表者: [ あなたのお名前] [ 所属] CMI](https://files.speakerdeck.com/presentations/e582137a890b4b4f8f8fe72d722c5894/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}