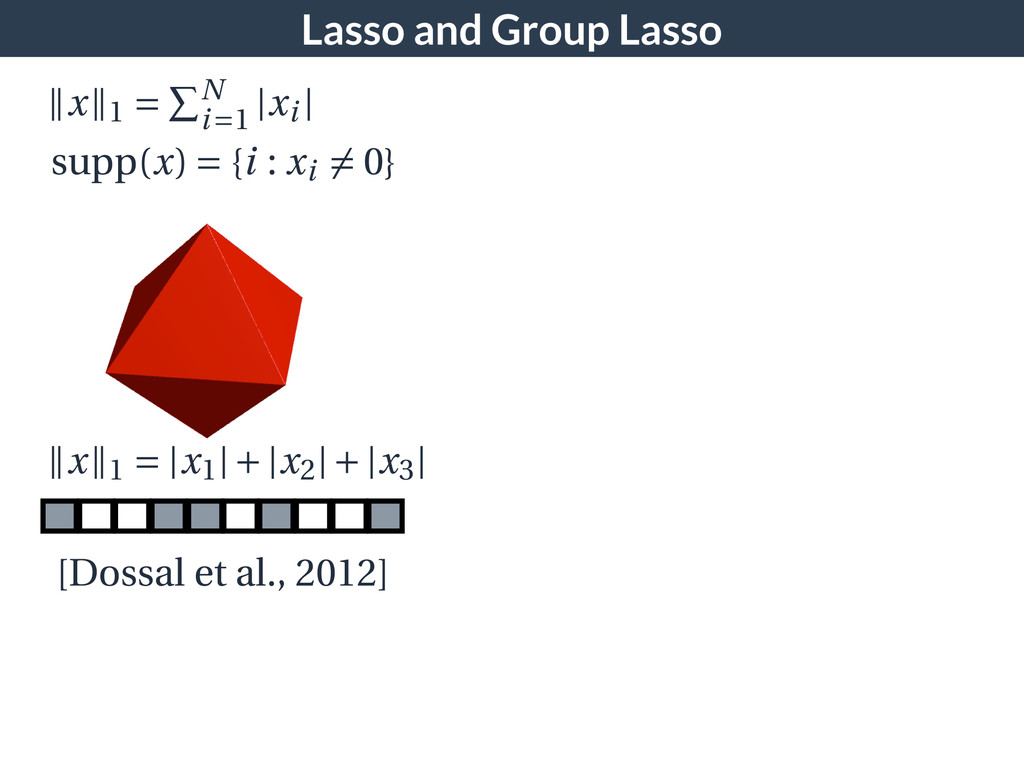
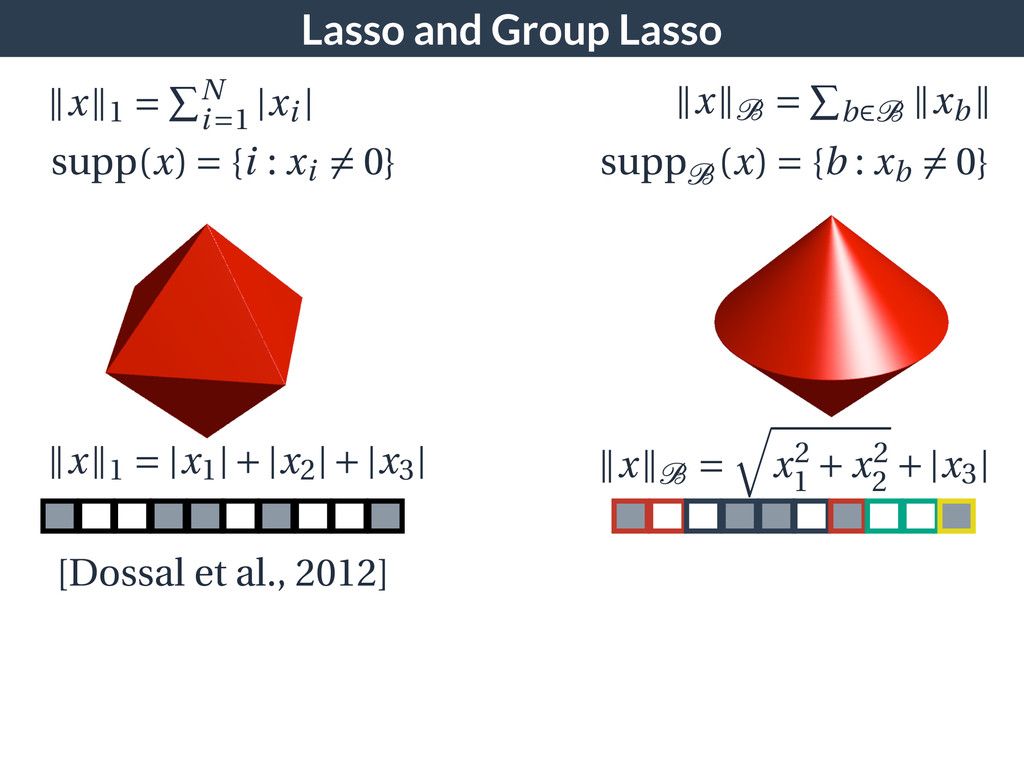
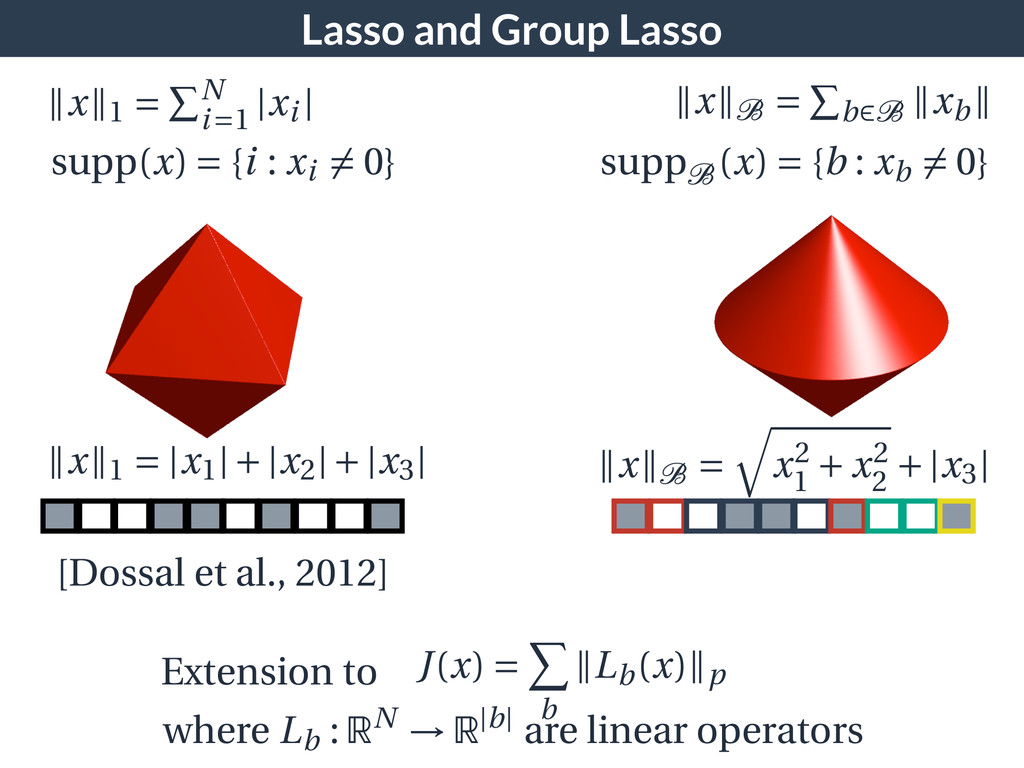
0} x 1 = |x1|+|x2|+|x3| x 1 = N i=1 |xi | x B = b∈B xb suppB (x) = {b : xb = 0} x B = x2 1 + x2 2 +|x3| J(x) = b Lb(x) p where Lb : RN R|b| are linear operators Extension to [Dossal et al., 2012]
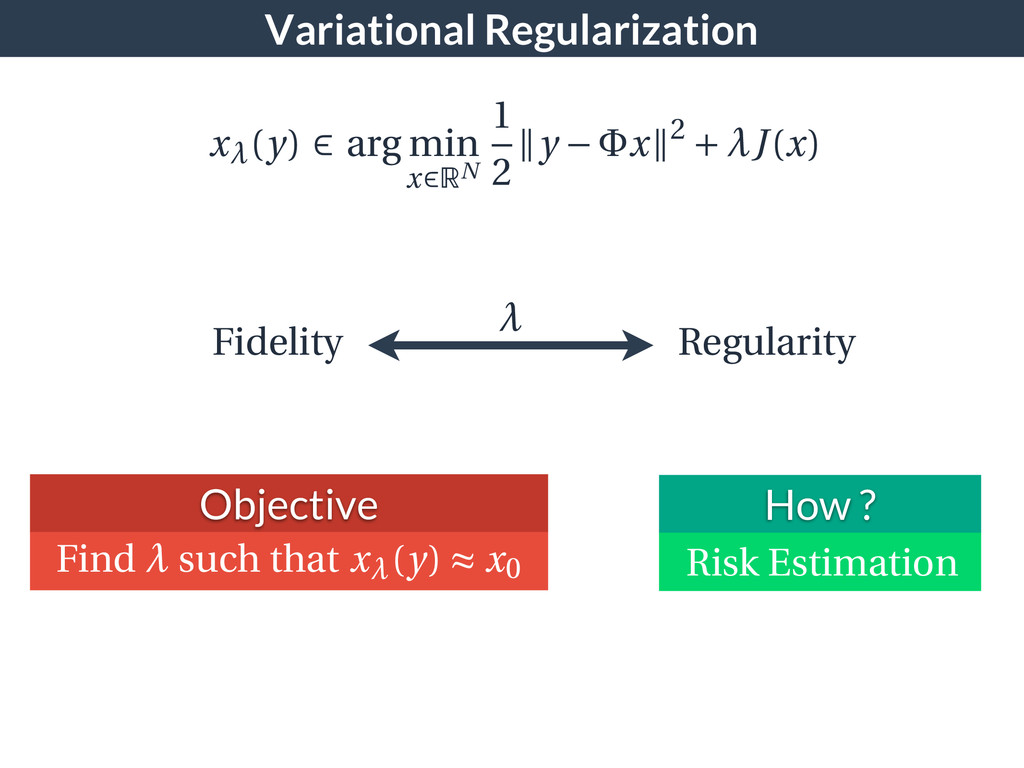
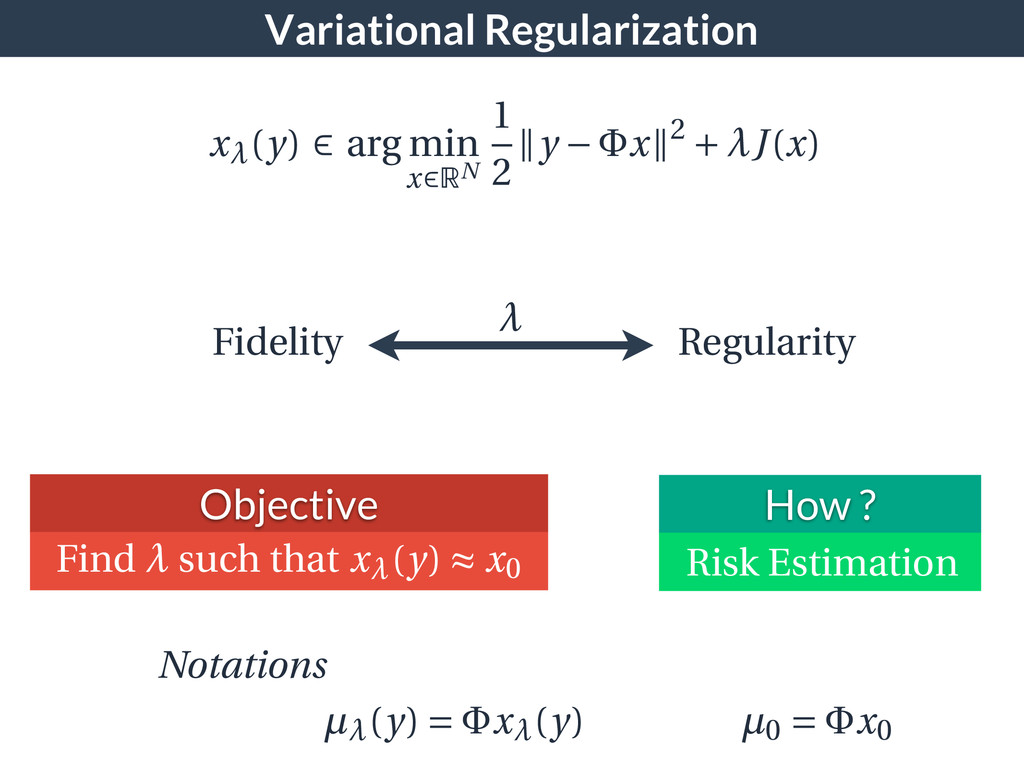
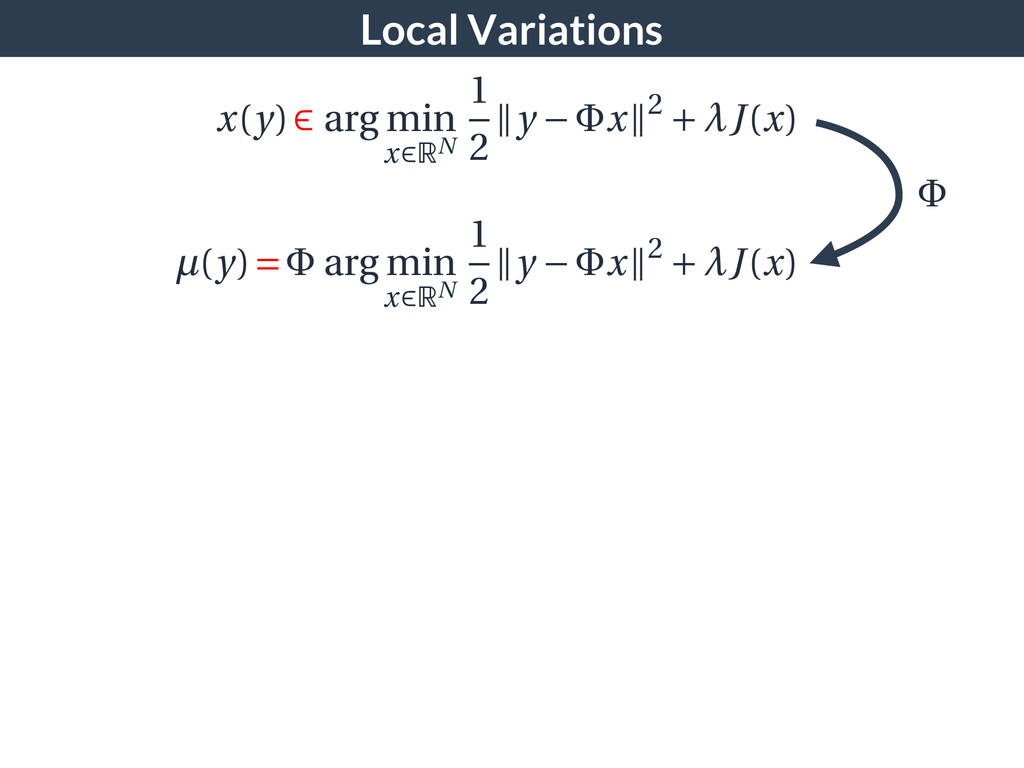
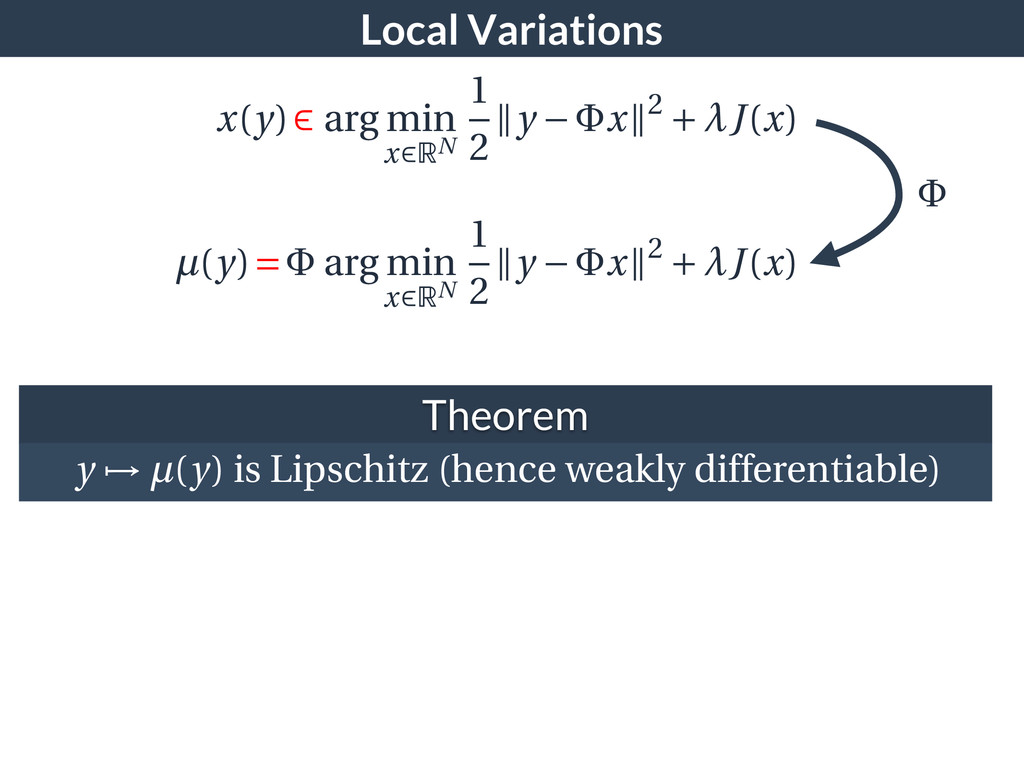
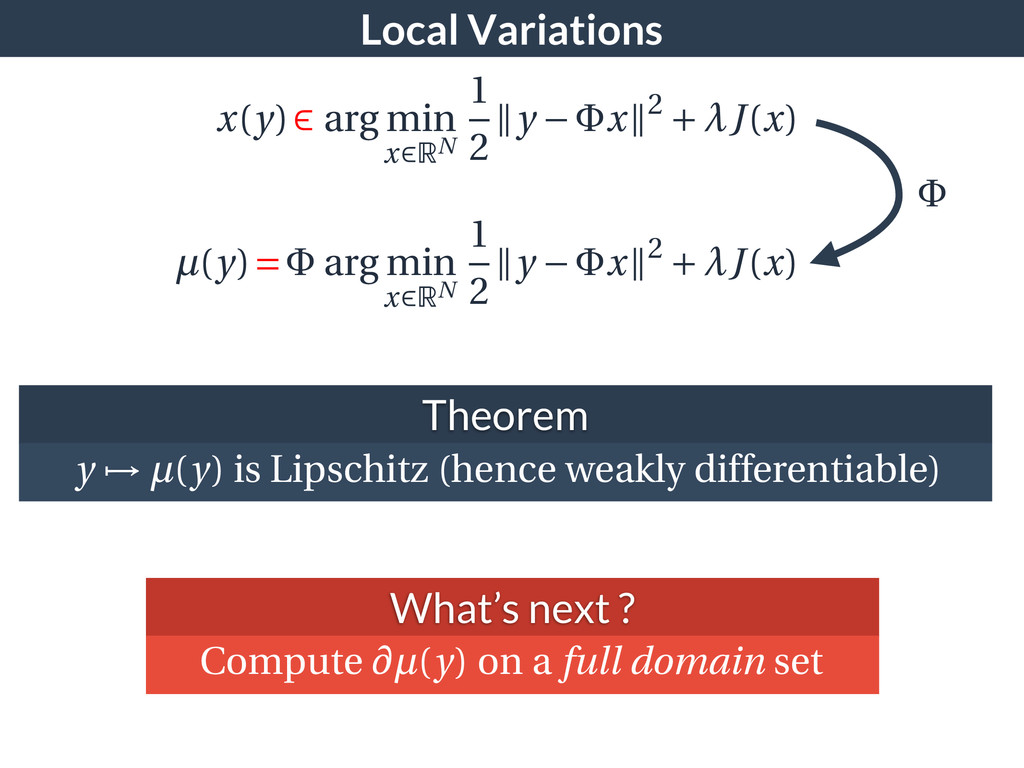
x 2 + J(x) µ(y)= arg min x RN 1 2 y x 2 + J(x) Theorem y µ(y) is Lipschitz (hence weakly differentiable) What’s next ? Compute µ(y) on a full domain set
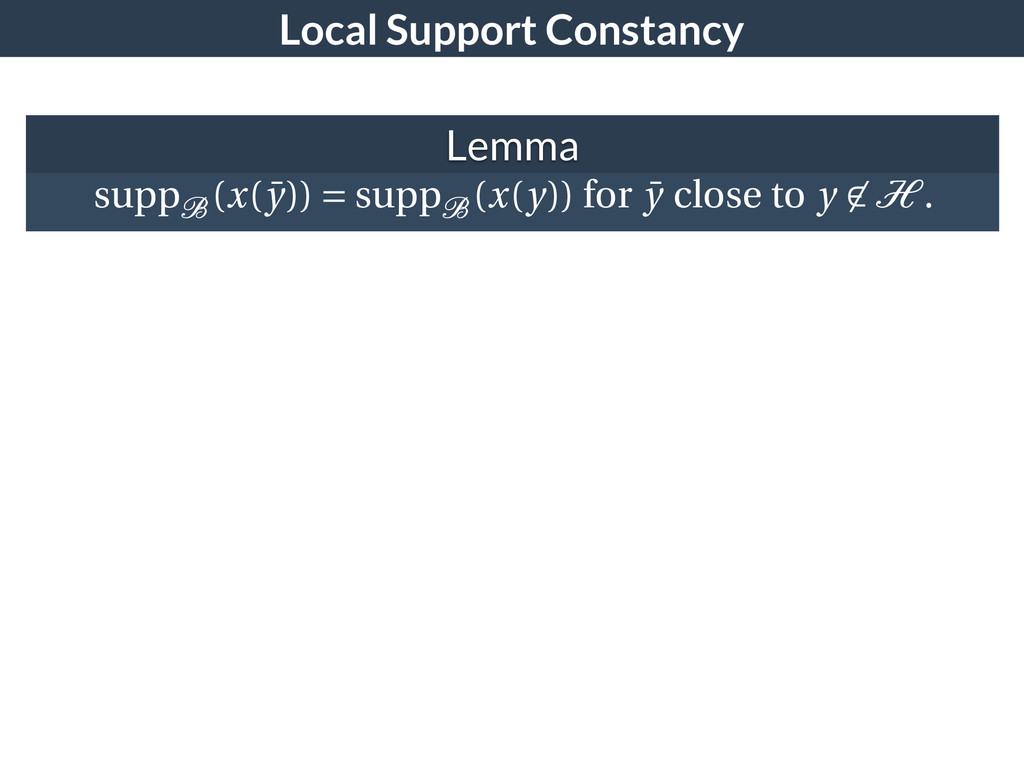
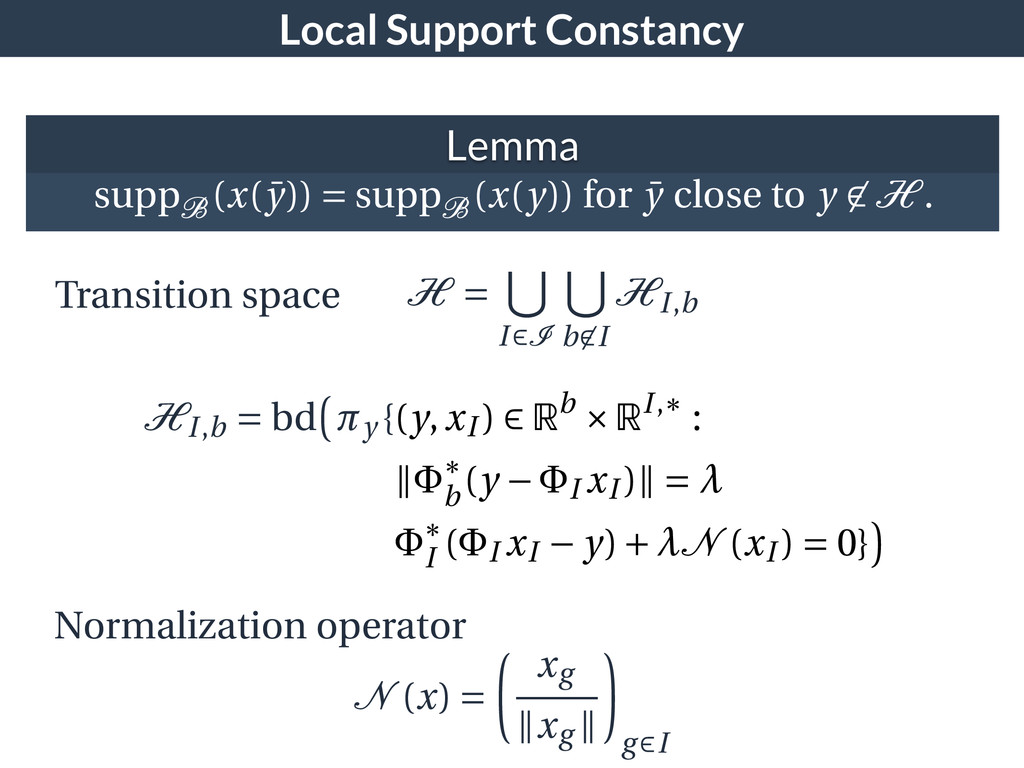
(x(y)) for ¯ y close to y H . H = I I b I HI,b HI,b = bd y {(y,xI ) Rb RI, : b (y I xI ) = I ( I xI y)+ N (xI ) = 0} Normalization operator Transition space N (x) = xg xg g I
2 ¯ y x 2 + J(x) I (xI ) = (xI , ¯ y) = I I + xI PxI Lemma x(y) with I (xI (y)) invertible and I = suppB (x(y)) First-order condition on I = suppB (x(y)) (xI ( ¯ y), ¯ y) = I ( I xI ( ¯ y) ¯ y)+ N (xI ( ¯ y))
2 ¯ y x 2 + J(x) I (xI ) = (xI , ¯ y) = I I + xI PxI Lemma x(y) with I (xI (y)) invertible and I = suppB (x(y)) First-order condition on I = suppB (x(y)) (xI ( ¯ y), ¯ y) = I ( I xI ( ¯ y) ¯ y)+ N (xI ( ¯ y)) Corollary y H , µI (y) = I I (x(y)) 1 I Implicit function theorem
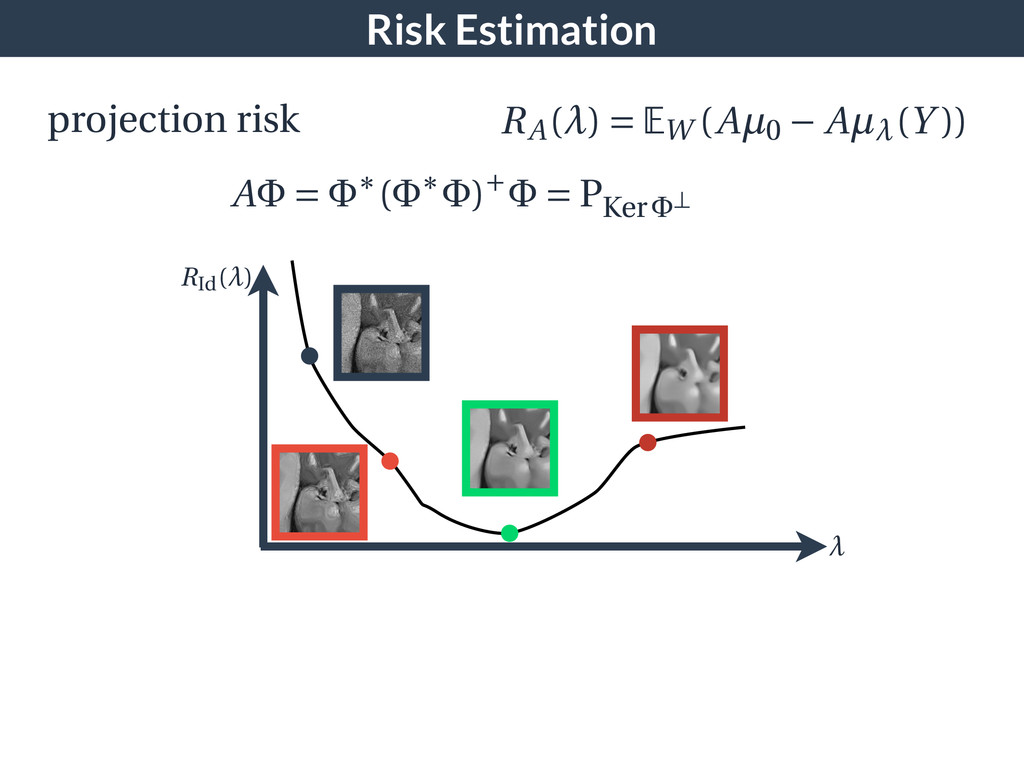
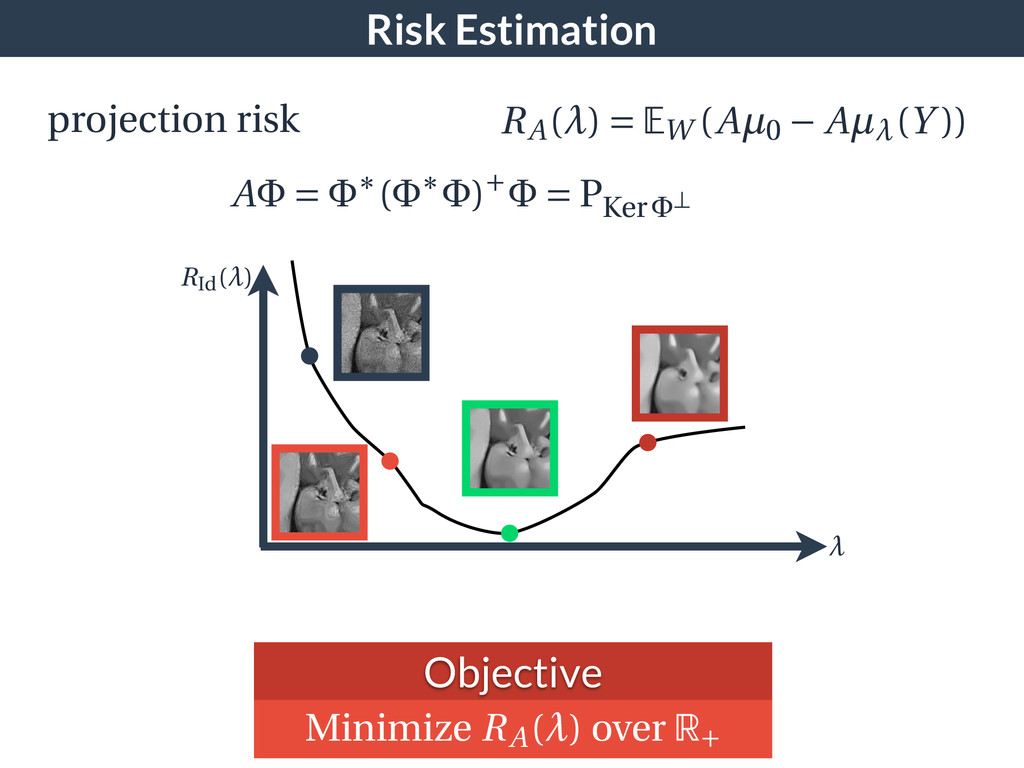
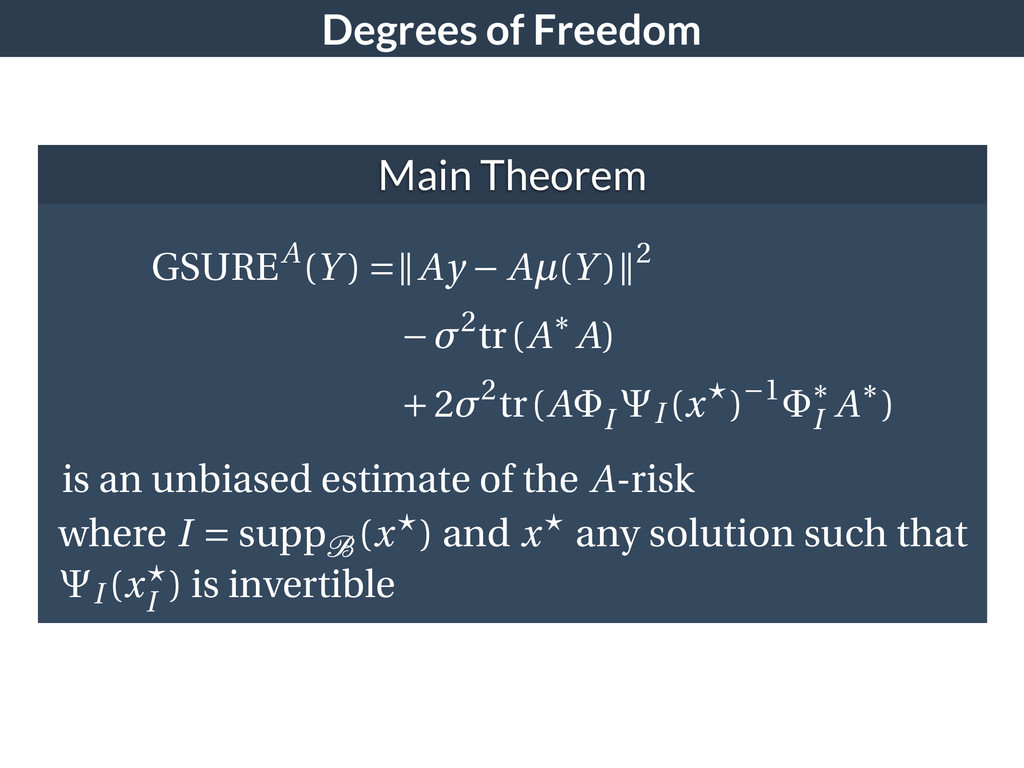
) and x any solution such that I (x I ) is invertible GSUREA(Y ) = Ay Aµ(Y ) 2 2tr(A A) +2 2tr(A I I (x ) 1 I A ) is an unbiased estimate of the A-risk
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}