Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ZephyrRTOSざっくり入門#2
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
soburi
December 14, 2024
Technology
310
3
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ZephyrRTOSざっくり入門#2
https://speakerdeck.com/tokitahiroshi/zephyrrtoszatukuriru-men
の続きです。
雑にシールドとかをつないでみます。
soburi
December 14, 2024
More Decks by soburi
See All by soburi
Community Activities In Japan
tokitahiroshi
0
110
ZephyrでWASMを動かして起きる色々なこと
tokitahiroshi
0
240
OSSJ CFP提出反省会
tokitahiroshi
0
190
Zephyr RTOS Tutorial & MeetUp @ OSC2025Tokyo/Spring 駒澤大学種月館
tokitahiroshi
1
1.1k
ZephyrRTOSざっくり入門
tokitahiroshi
4
1.3k
The_Features_of_ZephyrRTOS_and_the_project_operations.pdf
tokitahiroshi
1
130
KiCad 8.0 出ました。
tokitahiroshi
0
450
小江戸らぐ2024/2
tokitahiroshi
0
190
ZephyrRTOSで遊ぼう!
tokitahiroshi
0
830
Other Decks in Technology
See All in Technology
10年目を迎えた「ABEMA」がどのように AI 活用を推進して、AI 駆動開発にシフトしているのか / How ABEMA, entering its 10th year, is promoting the use of AI and shifting toward AI-driven development
miyukki
0
290
企業でAWS Organizationsを動かすための組織設計の考え方
nrinetcom
PRO
1
110
ヘルスケア領域における AI 活用と その安全性担保のための取り組み (Leveraging AI in Healthcare and Our Efforts to Ensure Its Safety) - Google I/O Extended Tokyo 2026, July 11, 2026
zettaittenani
0
430
しくみを学んで使いこなそう GitHub Copilot app
torumakabe
2
290
SRE Next 2026 何でも屋からの脱却
bto
0
1k
ruby.wasmとPicoRuby.wasmに対応した仮想DOMライブラリを作ってる話 #kaigieffect_kaigi
sue445
PRO
0
150
AI、CDK と協働する Full TypeScript アプリケーション開発 / Full TypeScript Application with AI and CDK
geekplus_tech
2
410
LLM/Agent評価:トップ営業の発言を「正解」にする 〜暗黙的正解による評価を営業資産に変える〜
takkuhiro
1
230
伝票作成AIエージェントを支える、LLMOpsとインフラの選択肢 / AICon2026_takeda
rakus_dev
0
140
オブザーバビリティ、本当に活用できてる? 〜API連携×生成AIで成熟度を自動評価〜
dmmsre
1
3.6k
Alphaモジュール使っていいのかい!?いけないのかい!?どっちなんだいっ!?
watany
1
290
[2026-07-15] AI Ready なはずだったアーキテクチャと、見えてきた課題・次に目指す状態
wxyzzz
10
4k
Featured
See All Featured
Digital Ethics as a Driver of Design Innovation
axbom
PRO
1
350
More Than Pixels: Becoming A User Experience Designer
marktimemedia
3
460
[Rails World 2023 - Day 1 Closing Keynote] - The Magic of Rails
eileencodes
38
2.9k
Scaling GitHub
holman
464
140k
A designer walks into a library…
pauljervisheath
211
24k
Rebuilding a faster, lazier Slack
samanthasiow
85
9.6k
sira's awesome portfolio website redesign presentation
elsirapls
0
300
AI Search: Implications for SEO and How to Move Forward - #ShenzhenSEOConference
aleyda
1
1.3k
jQuery: Nuts, Bolts and Bling
dougneiner
66
8.5k
Design of three-dimensional binary manipulators for pick-and-place task avoiding obstacles (IECON2024)
konakalab
0
490
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
コードの90%をAIが書く世界で何が待っているのか / What awaits us in a world where 90% of the code is written by AI
rkaga
62
45k
Transcript
ZephyrRTOS ざっくり入門 #2 常田 裕士 秋葉原ロボット部 第148回勉強会 @ 秋葉原 ロボスタディオン
Hello Worldと Lチカを読む
Hello World. samples/hello_world にあるので写経しましょう。 ファイル構成: CMakeLists.txt: Cmakeの設定ファイル。コンパイル対象の設定に使う。
prj.conf: ビルドオプションの設定 src/main.c: これが本体 README.rst: 気にしない。 単なるドキュメント。ZephyrではreStructuredTextが標準 Sample.yaml: 見なかったことにする。 自動試験用の設定ファイル
CMakeLists.txt CMakeの設定ファイルは基本的にはコンパイル対象とincludeパスの追加のみ find_package(Zephyr REQUIRED HINTS $ENV{ZEPHYR_BASE}) はオマジナイとして必須。
Zephyr固有のCmakeの設定がまるっと読み込まれる。 ベタでcmakeコマンドは使わないので、ここで頑張らないこと。 だいたいの場合、このファイルのコピペで十分。
prj.conf 設定のメインはこれで行う。 LinuxのKconfigシステムを移植して使っ ている。 CONFIG_~=y で各種オプションを設定 する。
オプションは山程ある。(現状20000程 度) west build –t menuconfigで設定ができ る。 west build –t guiconfig でいい感じの画 面で設定ができる。 (apt install python3-tk が必要)
src/main.c どこにでもある普通のHello World. 「どこにでもある普通のHello World」が 素直に動かないのが組み込み開発。 (最近はだいぶ減った)
ANSI Cがない、main()がない、謎のlinkerスクリプト… Zephyrは組み込み、RTOSではあるが、かなり普通の「C言語」で書ける。 とはいえ、POSIXを意識するfopenあたりになると互換レイヤーを組み込む形に。 この辺はソニーのSpresenseが使ってるNuttXの方が上手にやっている。 #include <stdio.h> int main(void) { printf("Hello World! %s¥n", CONFIG_BOARD_TARGET); return 0; }
blinky これも写経推奨。samples/basic/blinkyにある。 samples/basic配下は基本的なサンプルが入ってい るので一通り動かすと良い。 設定はHello Worldとさして変わらず。LEDのた めにGPIOを使うので、prj.confで
CONFIG_GPIO=yが指定されてる。
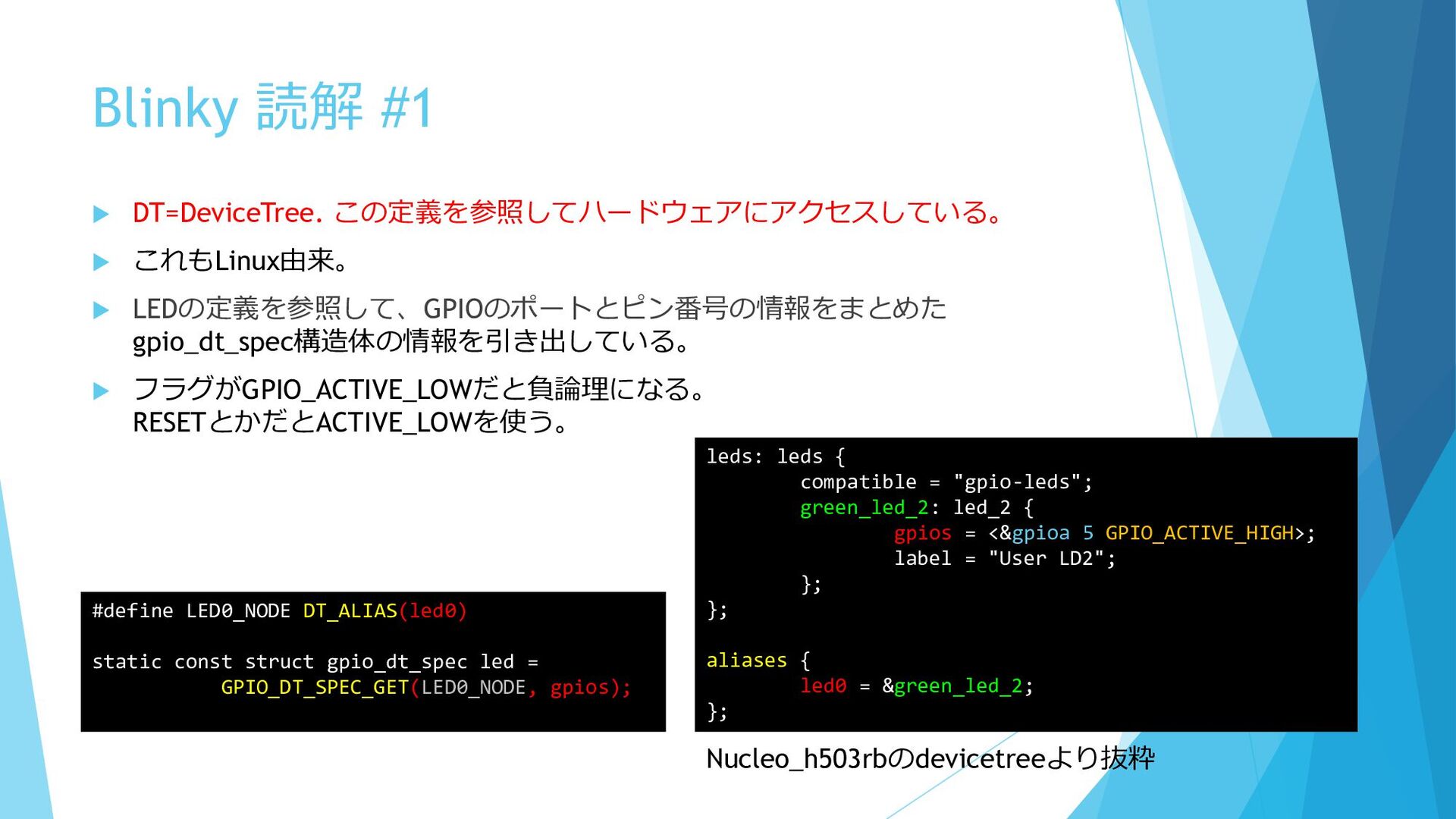
Blinky 読解 #1 #define LED0_NODE DT_ALIAS(led0) static const struct gpio_dt_spec
led = GPIO_DT_SPEC_GET(LED0_NODE, gpios); leds: leds { compatible = "gpio-leds"; green_led_2: led_2 { gpios = <&gpioa 5 GPIO_ACTIVE_HIGH>; label = "User LD2"; }; }; aliases { led0 = &green_led_2; }; DT=DeviceTree. この定義を参照してハードウェアにアクセスしている。 これもLinux由来。 LEDの定義を参照して、GPIOのポートとピン番号の情報をまとめた gpio_dt_spec構造体の情報を引き出している。 フラグがGPIO_ACTIVE_LOWだと負論理になる。 RESETとかだとACTIVE_LOWを使う。 Nucleo_h503rbのdevicetreeより抜粋
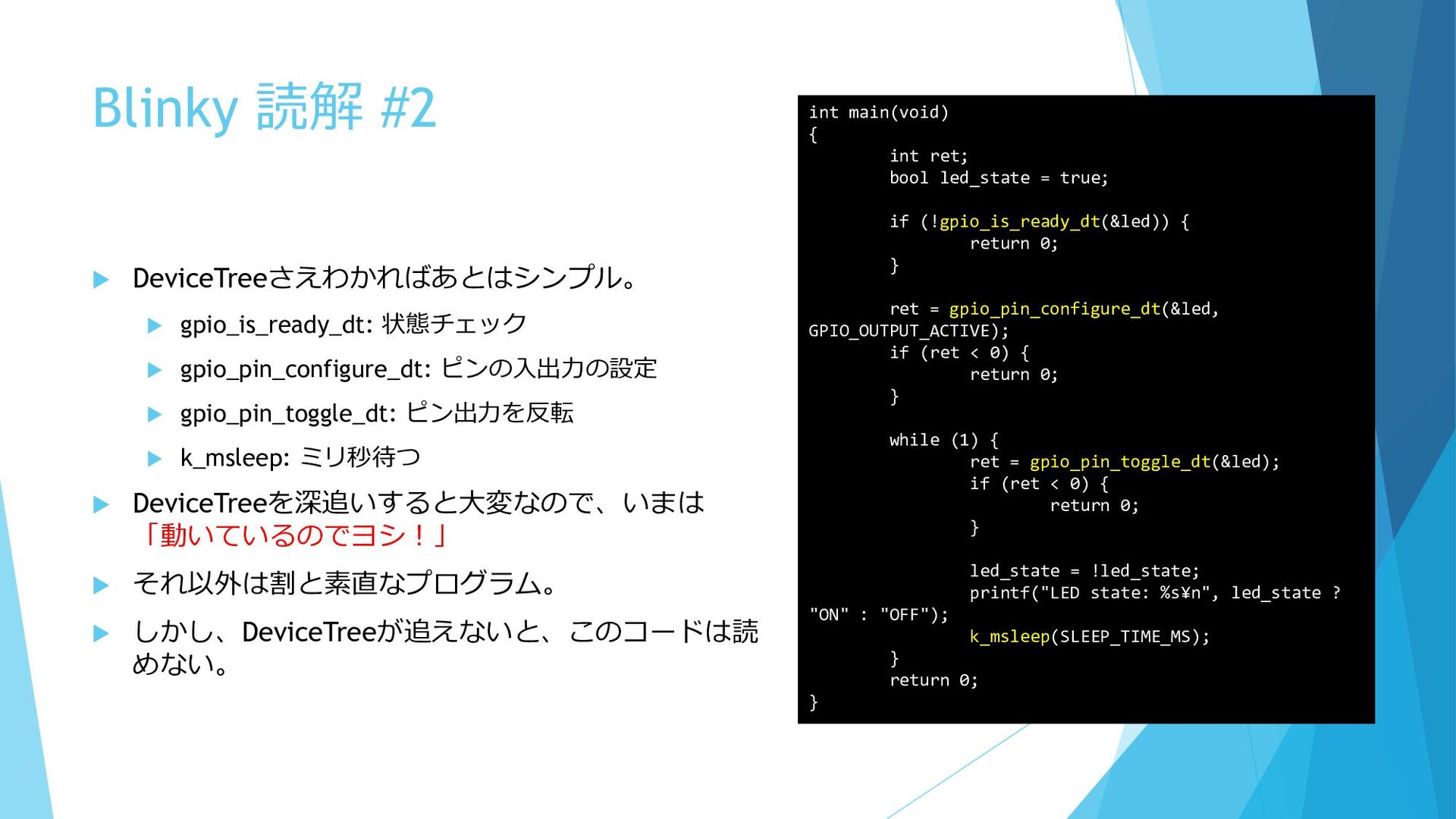
Blinky 読解 #2 DeviceTreeさえわかればあとはシンプル。 gpio_is_ready_dt: 状態チェック gpio_pin_configure_dt:
ピンの入出力の設定 gpio_pin_toggle_dt: ピン出力を反転 k_msleep: ミリ秒待つ DeviceTreeを深追いすると大変なので、いまは 「動いているのでヨシ!」 それ以外は割と素直なプログラム。 しかし、DeviceTreeが追えないと、このコードは読 めない。 int main(void) { int ret; bool led_state = true; if (!gpio_is_ready_dt(&led)) { return 0; } ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE); if (ret < 0) { return 0; } while (1) { ret = gpio_pin_toggle_dt(&led); if (ret < 0) { return 0; } led_state = !led_state; printf("LED state: %s¥n", led_state ? "ON" : "OFF"); k_msleep(SLEEP_TIME_MS); } return 0; }
DeviceTree DeviceTreeはZephyrを特徴づける最大の要素 「汎用RTOS」であるため、カーネルの基本機能で強い「色」はついていない。 Linuxと違って、DeviceTreeを静的にコンパイルして組み込む。 組み込み用途で必要なフットプリント最小化と、 実装と構成の分離を同時に実現している。
このトレードとして、 大変煩雑なC言語のマクロの記述が必要になる このpros/consのトレードの判断こそが Zephyrを特徴づけている
© 2024 Fujitsu Limited Linuxでの DeviceTree 11 DeviceTreeの仕様にある、DTB形式 (DeviceTree
Blob)を使う。 テキストで記述されたDTS(DeviceTree Source)をDTBにコンパイルする カーネルが起動時にDTBを読んで、構成 (Configuration)データとして利用する。
ZephyrでのDeviceTree © 2024 Fujitsu Limited 12 DeviceTreeの書式はLinuxと同じ(DeviceTreeの仕様通り) ZephyrではDTBを使わない
DeviceTreeから巨大なC言語のコード(マクロ)を生成する 動的な構成の変更はできない。 実装と構成を分離して、コードの再利用性を高めるのが目的。 Linuxでもこの目的で導入された。 LKML: Linus Torvalds: Re: [GIT PULL] omap changes for v2.6.39 merge window (ARM 関連のコードが激増し、Linus氏が激怒したという逸話) Zephyrでも同様に効果が上がっている。
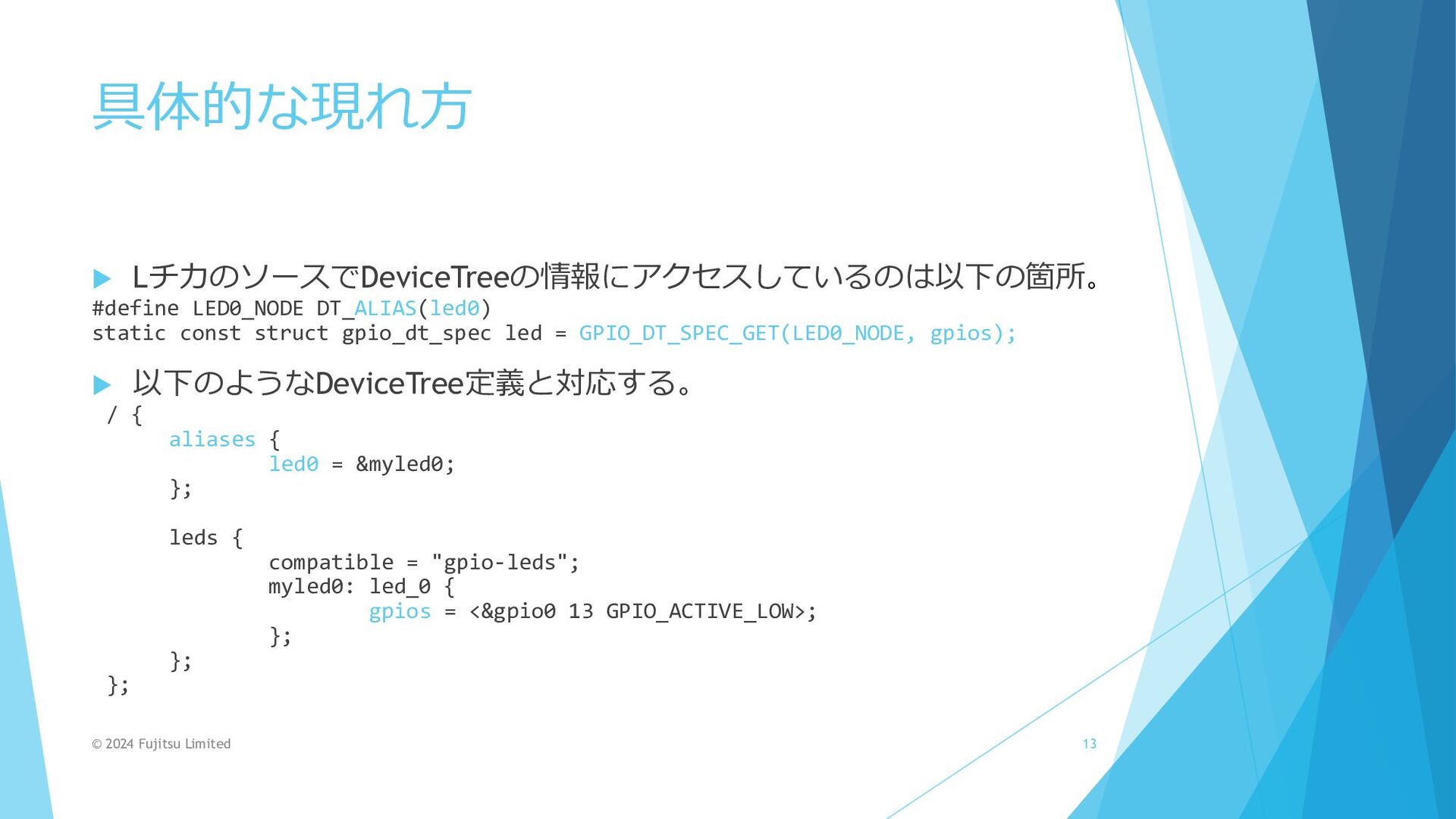
具体的な現れ方 LチカのソースでDeviceTreeの情報にアクセスしているのは以下の箇所。 #define LED0_NODE DT_ALIAS(led0) static const struct gpio_dt_spec
led = GPIO_DT_SPEC_GET(LED0_NODE, gpios); 以下のようなDeviceTree定義と対応する。 / { aliases { led0 = &myled0; }; leds { compatible = "gpio-leds"; myled0: led_0 { gpios = <&gpio0 13 GPIO_ACTIVE_LOW>; }; }; }; © 2024 Fujitsu Limited 13
DeviceTreeの闇 DeviceTreeでは、配列の定義があるので、Zephyrのマクロでも配列をループ処 理するためのマクロ(!)が生成される。 ~_FOREACH_…という名前で、マクロを引数に取って、それを各要素に適用する高 階関数(高階マクロ?)が作られる。 COND_CODE_1
#ifdefと似たような動きをするが、マクロの引数で与えた値でコードの有効無効を切 り替える機能。 中身は完全に黒魔術(##を使った多重のマクロ展開をうまく使っている。解析が非 常に面倒) 上記のFOREACHと組み合わせると、DeviceTreeの定義に合わせて、無駄なくコード を生成できる。 © 2024 Fujitsu Limited 14
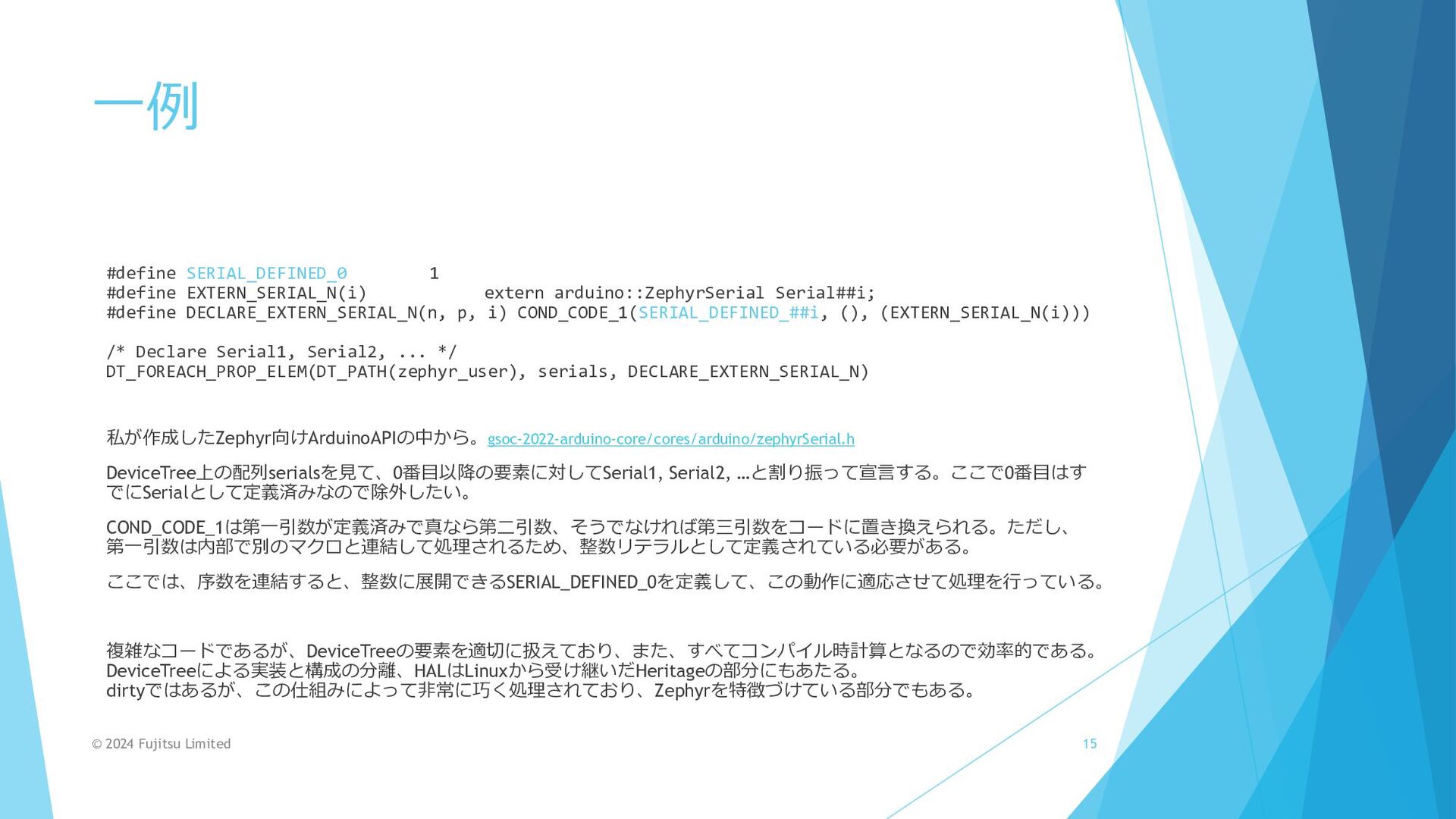
一例 #define SERIAL_DEFINED_0 1 #define EXTERN_SERIAL_N(i) extern arduino::ZephyrSerial Serial##i; #define
DECLARE_EXTERN_SERIAL_N(n, p, i) COND_CODE_1(SERIAL_DEFINED_##i, (), (EXTERN_SERIAL_N(i))) /* Declare Serial1, Serial2, ... */ DT_FOREACH_PROP_ELEM(DT_PATH(zephyr_user), serials, DECLARE_EXTERN_SERIAL_N) 私が作成したZephyr向けArduinoAPIの中から。gsoc-2022-arduino-core/cores/arduino/zephyrSerial.h DeviceTree上の配列serialsを見て、0番目以降の要素に対してSerial1, Serial2, …と割り振って宣言する。ここで0番目はす でにSerialとして定義済みなので除外したい。 COND_CODE_1は第一引数が定義済みで真なら第二引数、そうでなければ第三引数をコードに置き換えられる。ただし、 第一引数は内部で別のマクロと連結して処理されるため、整数リテラルとして定義されている必要がある。 ここでは、序数を連結すると、整数に展開できるSERIAL_DEFINED_0を定義して、この動作に適応させて処理を行っている。 複雑なコードであるが、DeviceTreeの要素を適切に扱えており、また、すべてコンパイル時計算となるので効率的である。 DeviceTreeによる実装と構成の分離、HALはLinuxから受け継いだHeritageの部分にもあたる。 dirtyではあるが、この仕組みによって非常に巧く処理されており、Zephyrを特徴づけている部分でもある。 © 2024 Fujitsu Limited 15
シールドを使う ZephyrにはArduinoのシールドのような拡張ボー ドを使う機能がある。 簡単には、west build のコマンドに –shield xxx
のオプションを追加すると、定義済みの シールドを組み込める。 boards/shields/ の下に入っているものが使える。 (まだ多くはない)
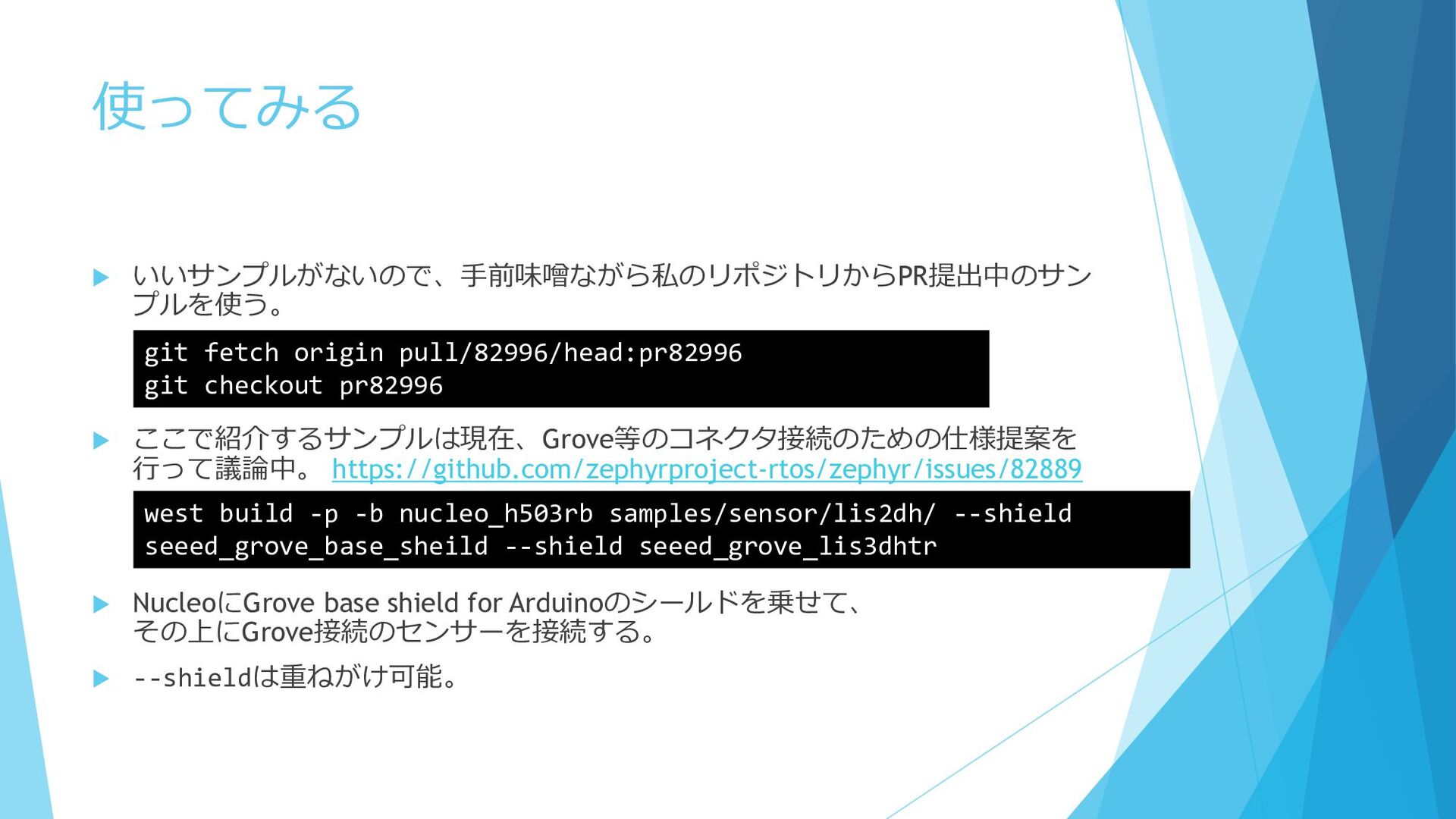
使ってみる いいサンプルがないので、手前味噌ながら私のリポジトリからPR提出中のサン プルを使う。 ここで紹介するサンプルは現在、Grove等のコネクタ接続のための仕様提案を 行って議論中。 https://github.com/zephyrproject-rtos/zephyr/issues/82889 NucleoにGrove
base shield for Arduinoのシールドを乗せて、 その上にGrove接続のセンサーを接続する。 --shieldは重ねがけ可能。 west build -p -b nucleo_h503rb samples/sensor/lis2dh/ --shield seeed_grove_base_sheild --shield seeed_grove_lis3dhtr git fetch origin pull/82996/head:pr82996 git checkout pr82996
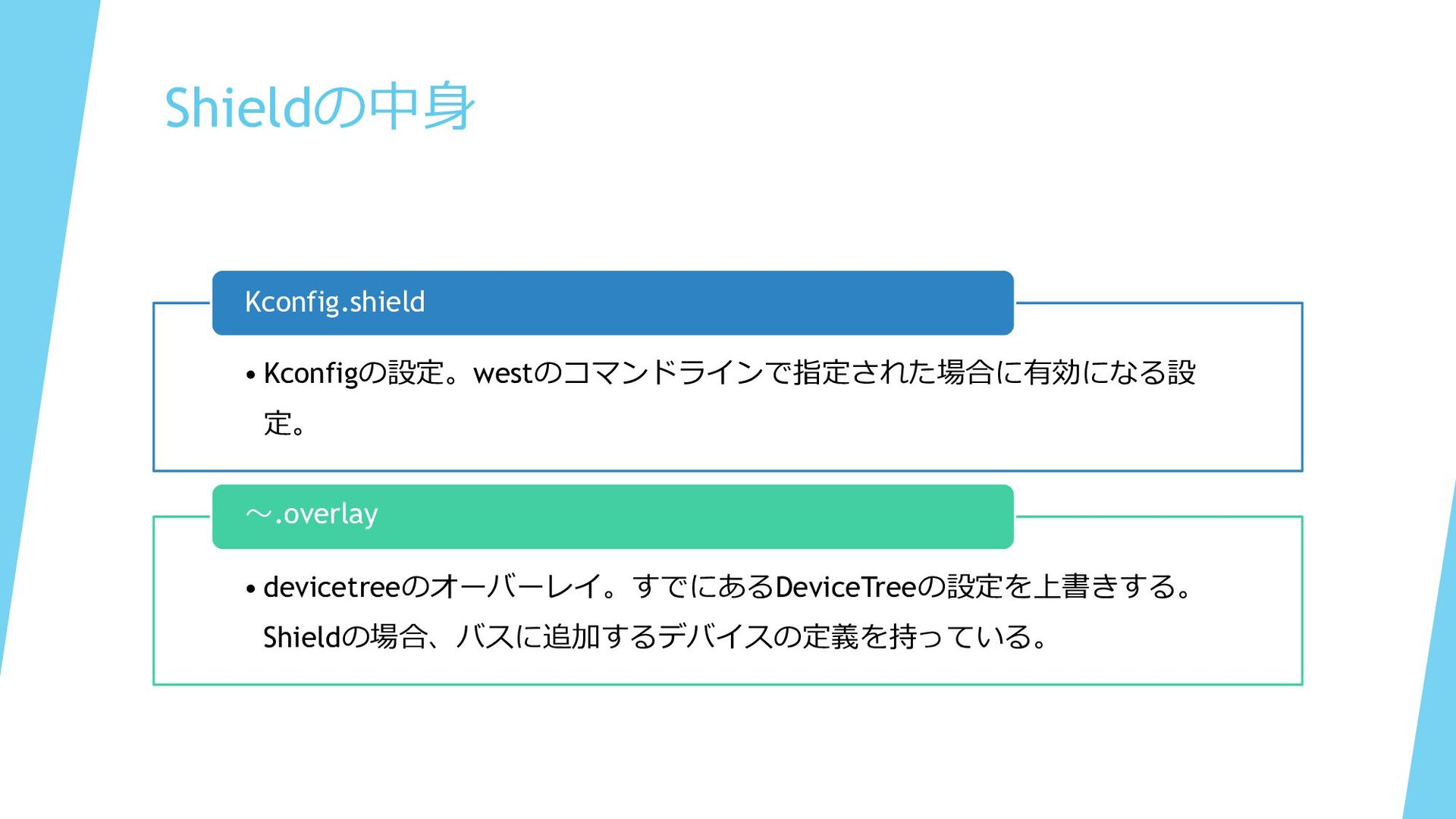
Shieldの中身 • Kconfigの設定。westのコマンドラインで指定された場合に有効になる設 定。 Kconfig.shield • devicetreeのオーバーレイ。すでにあるDeviceTreeの設定を上書きする。 Shieldの場合、バスに追加するデバイスの定義を持っている。 ~.overlay
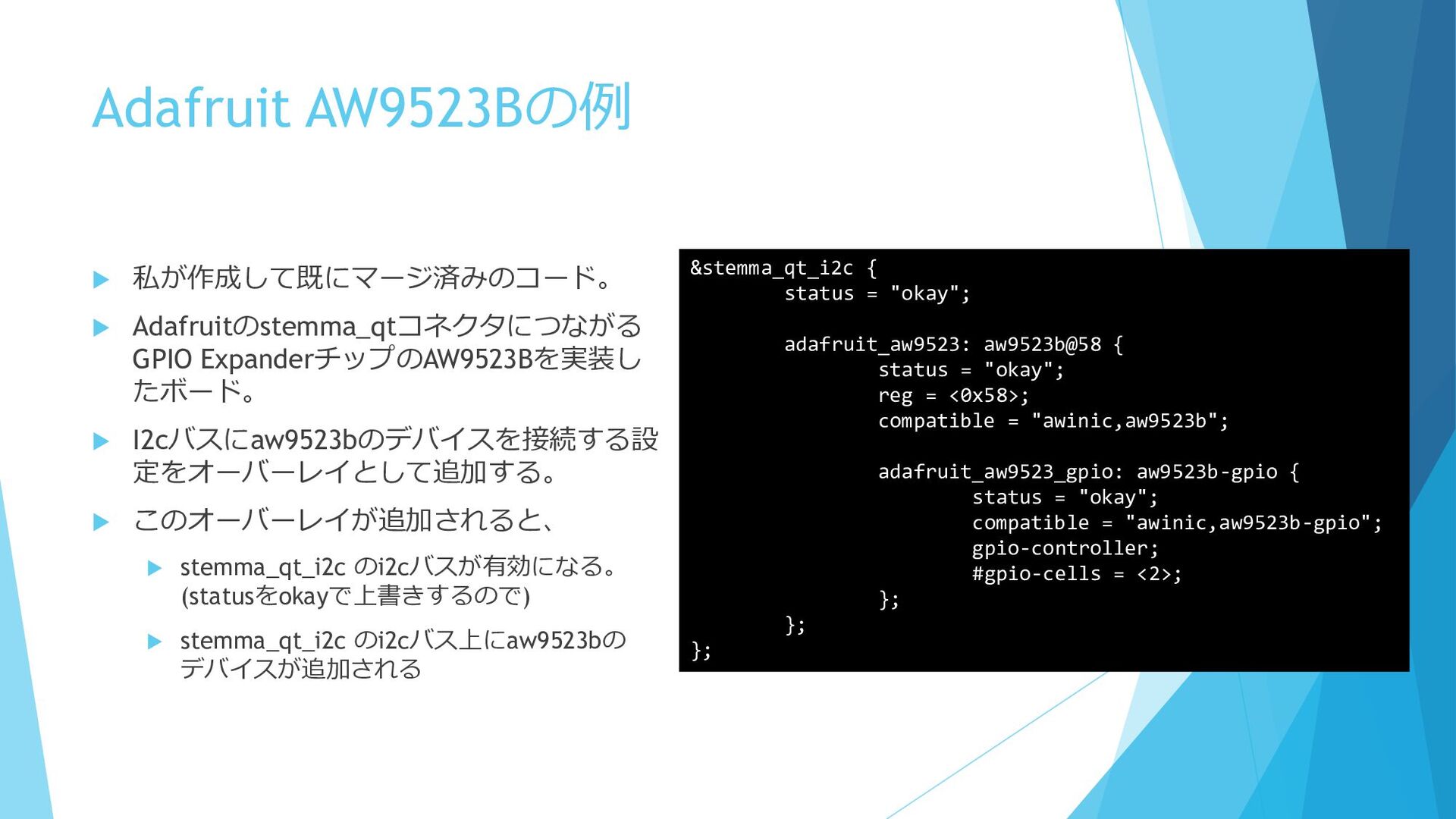
Adafruit AW9523Bの例 私が作成して既にマージ済みのコード。 Adafruitのstemma_qtコネクタにつながる GPIO ExpanderチップのAW9523Bを実装し たボード。
I2cバスにaw9523bのデバイスを接続する設 定をオーバーレイとして追加する。 このオーバーレイが追加されると、 stemma_qt_i2c のi2cバスが有効になる。 (statusをokayで上書きするので) stemma_qt_i2c のi2cバス上にaw9523bの デバイスが追加される &stemma_qt_i2c { status = "okay"; adafruit_aw9523: aw9523b@58 { status = "okay"; reg = <0x58>; compatible = "awinic,aw9523b"; adafruit_aw9523_gpio: aw9523b-gpio { status = "okay"; compatible = "awinic,aw9523b-gpio"; gpio-controller; #gpio-cells = <2>; }; }; };
オーバーレイの使われ方 Shield以外にもオーバーレイはあちこちで使われる。 west buildのオプションで --extra-dtc-overlay … で指定する
boards/ のディレクトリを作成し、[ボード名].overlayファイルを作成すると、 対象のボードのビルドの場合のみそれが適用される。 socも boardsと同様の対応が可能 ボードのリビジョン違いを定義するために使われる。
まとめ Zephyrのサンプルはソースツリーのsamplesの下に色々入ってる。 特にsamples/basicは基本的な使い方のサンプルで、動かしてみるのが良い。 デバイスにアクセスするためにはDeviceTreeから情報を持ってくる必要がある。 KconfigもDeviceTreeもLinuxから継承した仕組み。 DeviceTreeのオーバーレイを使ってデバイスの追加を行える。
Shieldはパッケージ化された形でオーバーレイを使える便利な仕組み。 オーバーレイはアプリ固有の設定やボードのカスタマイズなど色々な形で現れ る。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}