Maps Andrei Sherstyuk1 Anton Treskunov2 1Avatar Reality 2Samsung Virtual Reality Continuum and its Applications in Industry, 2009 Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
of collision prevention Small scale terrain case 2 Algorithm Map generation Collision avoidance Implementation 3 Results and Discussion User study Extensions Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
Small scale terrain case Collision Prevention is Important for Navigation Navigation system must provide Task-oriented travel metaphors Intuitive UI Means to help in difficult situations Collision subsystem goals Detect pending collisions Take measures to prevent them Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
Small scale terrain case Collision Detection is Hard, but... It is hard because of Complex geometry Large number of objects However, for terrains Problem reduced to 2D Environment is static Image courtesy of UNC Gamma group Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
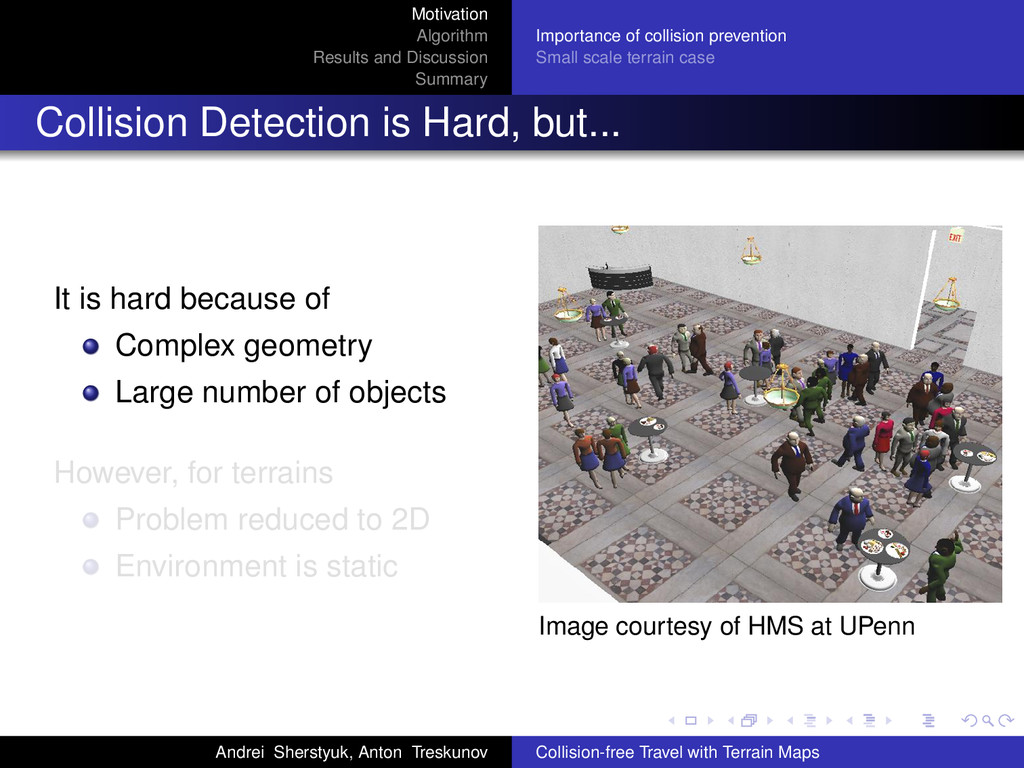
Small scale terrain case Collision Detection is Hard, but... It is hard because of Complex geometry Large number of objects However, for terrains Problem reduced to 2D Environment is static Image courtesy of HMS at UPenn Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
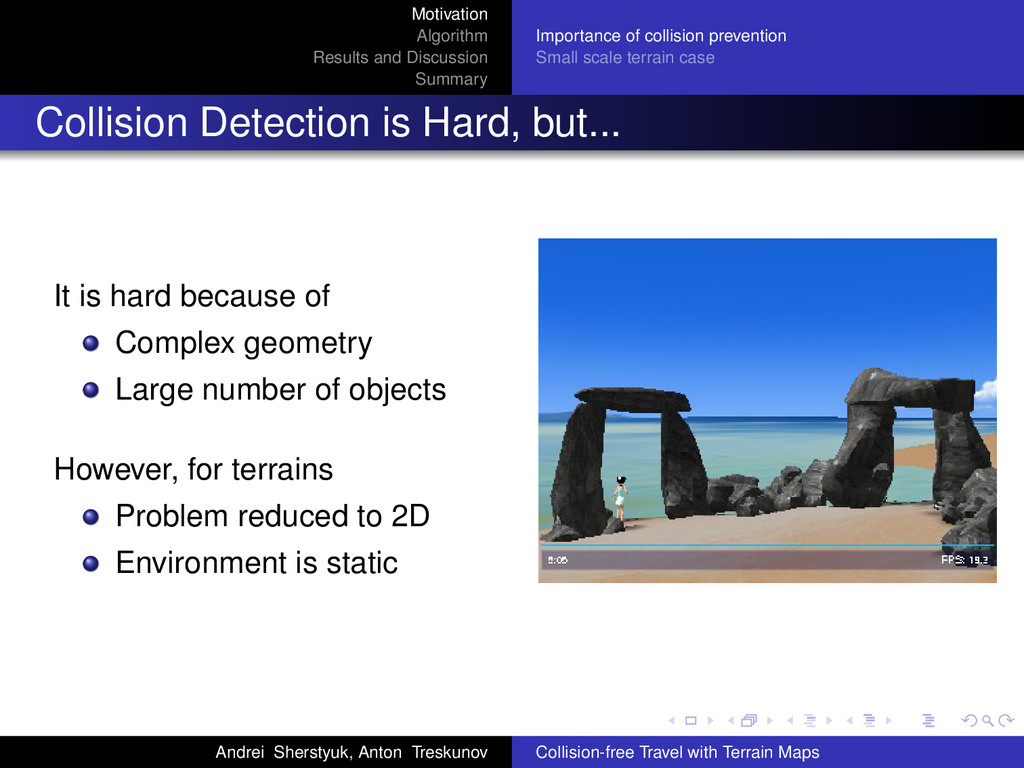
Small scale terrain case Collision Detection is Hard, but... It is hard because of Complex geometry Large number of objects However, for terrains Problem reduced to 2D Environment is static Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
Small scale terrain case Collision Prevention for Terrain Navigation Environment map is stored as an elevation grid, which is a 2D map. Static collision geometry is 2D map as well. Collision check via the map has O(1) performance cost. Reusing terrain maps for collision maps, gives us “free” collssion detection. Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
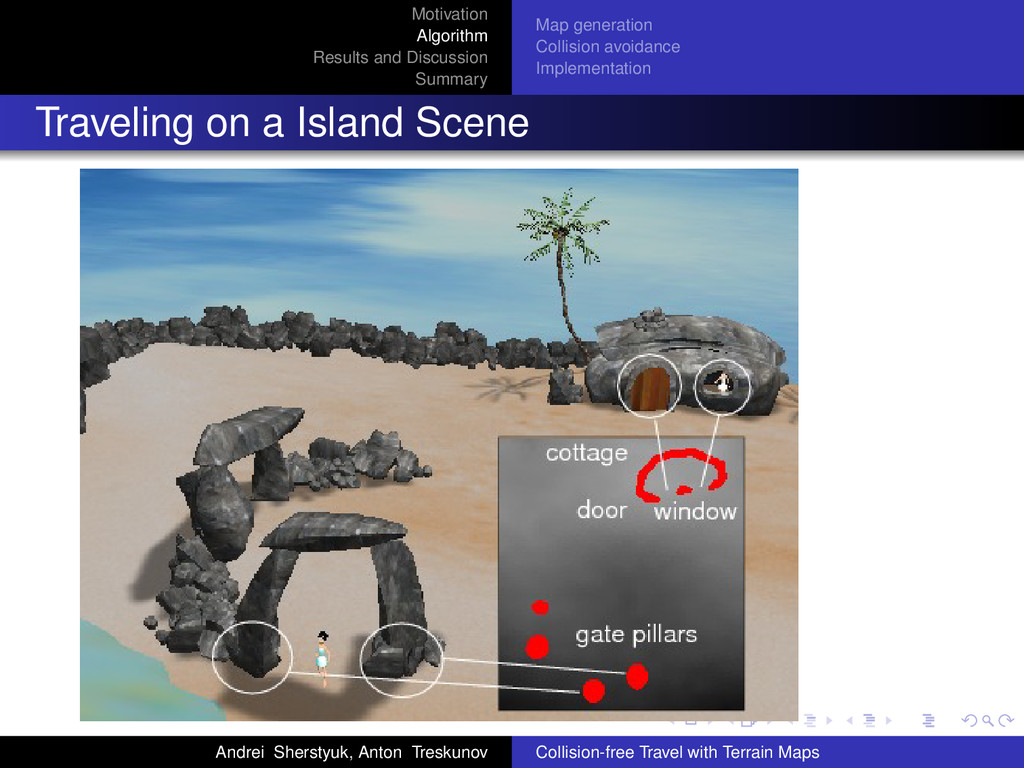
Small scale terrain case Medical Training VR System Training for Search-and-rescue, Triage and life saving procedures. Uneven terrain, small area, static obstacles Elevation grid as a raster image. Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
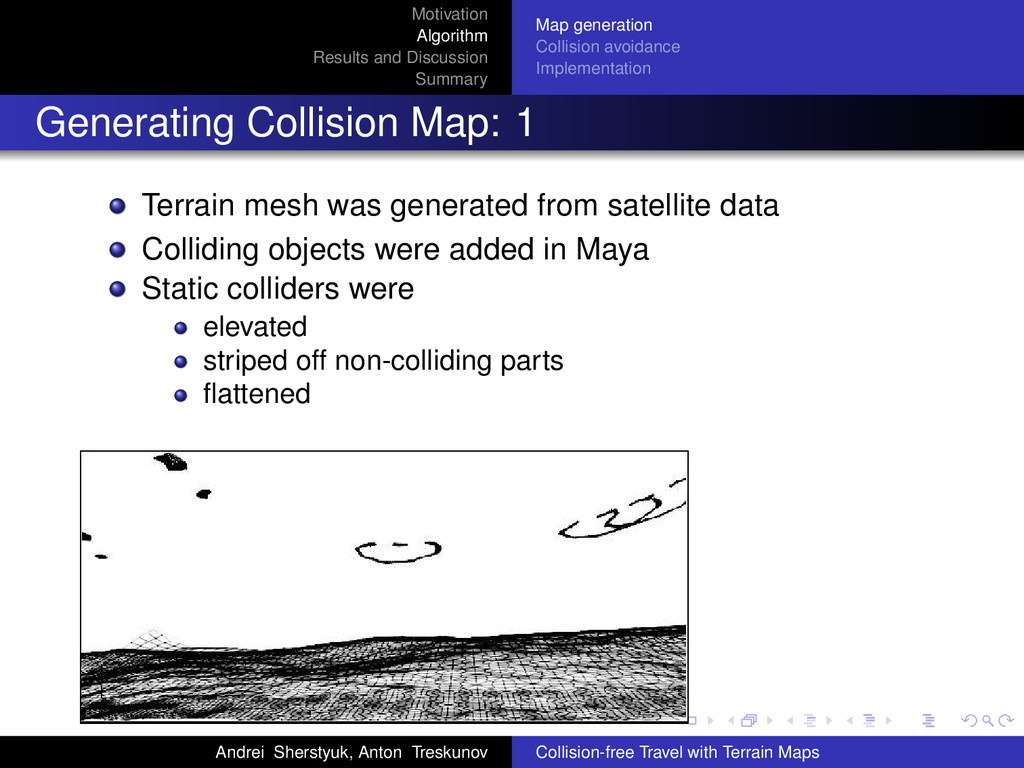
Implementation Generating Collision Map: 1 Terrain mesh was generated from satellite data Colliding objects were added in Maya Static colliders were elevated striped off non-colliding parts flattened Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
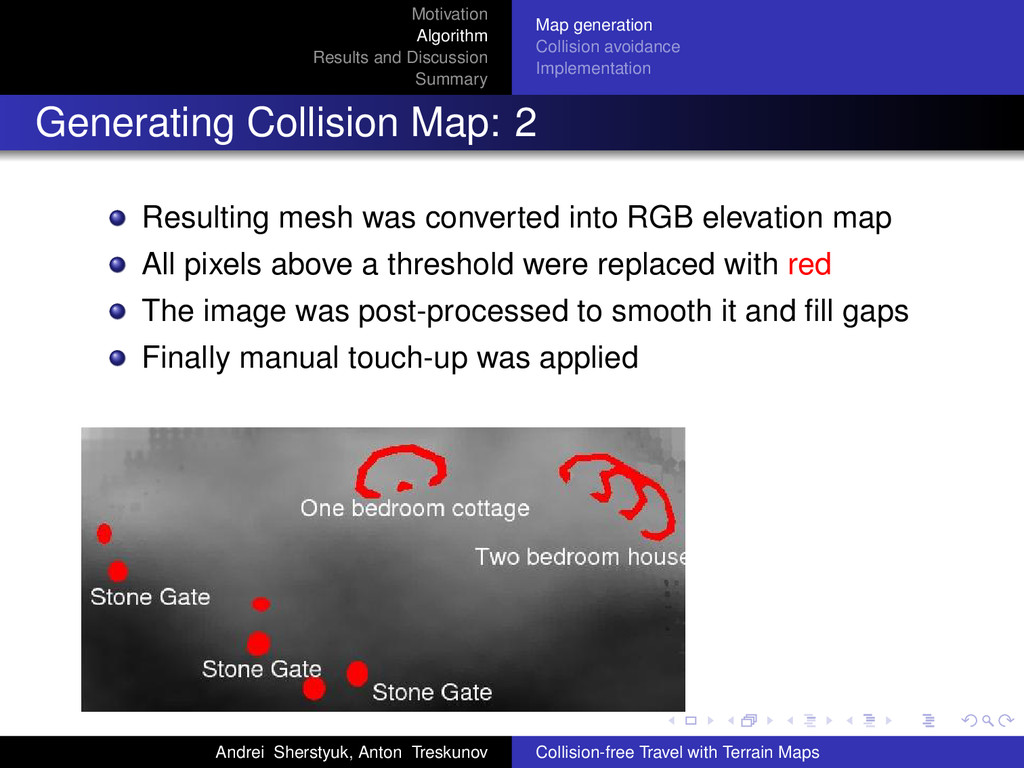
Implementation Generating Collision Map: 2 Resulting mesh was converted into RGB elevation map All pixels above a threshold were replaced with red The image was post-processed to smooth it and fill gaps Finally manual touch-up was applied Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
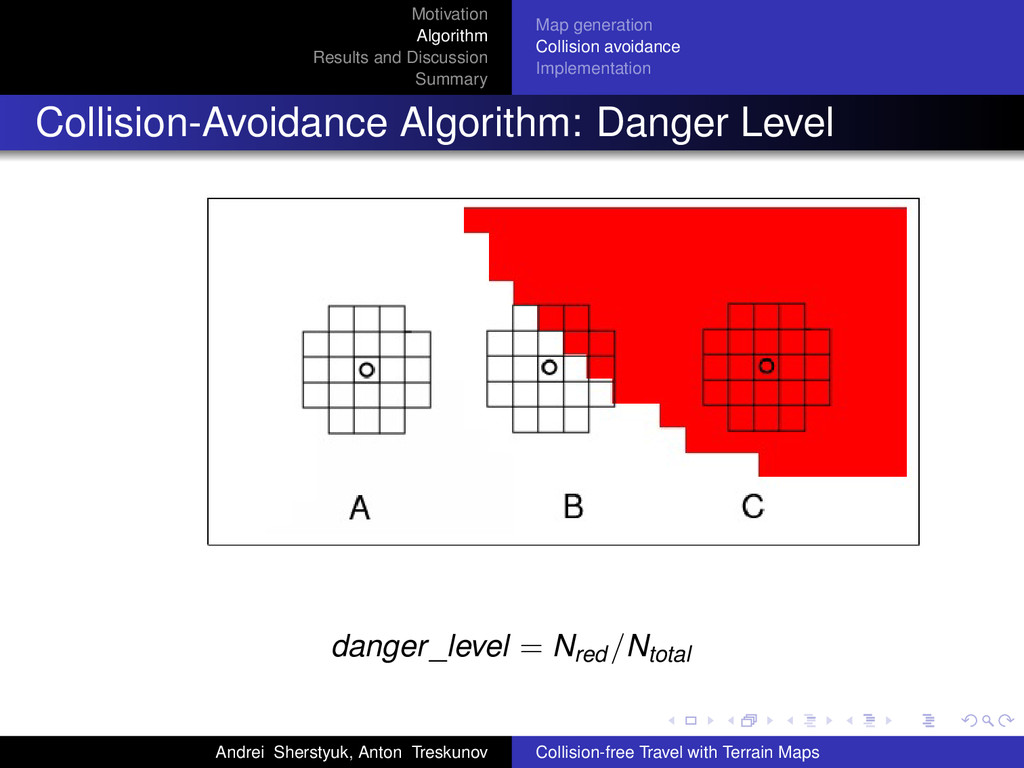
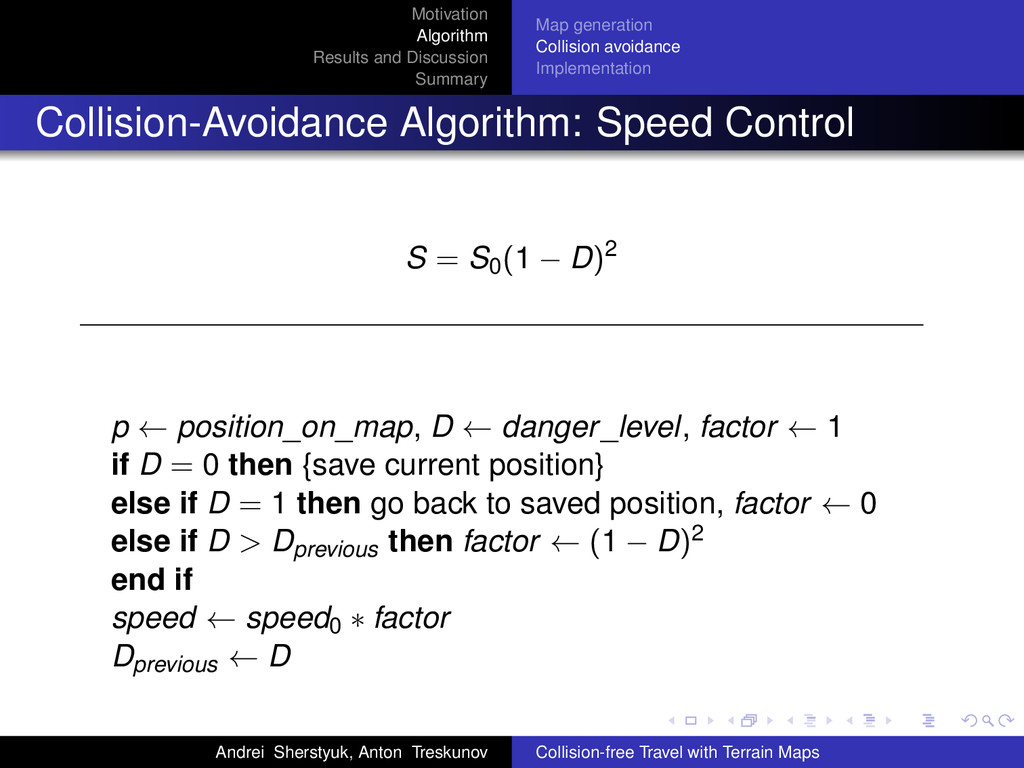
Implementation Collision-Avoidance Algorithm: Speed Control S = S0(1 − D)2 p ← position_on_map, D ← danger_level, factor ← 1 if D = 0 then {save current position} else if D = 1 then go back to saved position, factor ← 0 else if D > Dprevious then factor ← (1 − D)2 end if speed ← speed0 ∗ factor Dprevious ← D Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
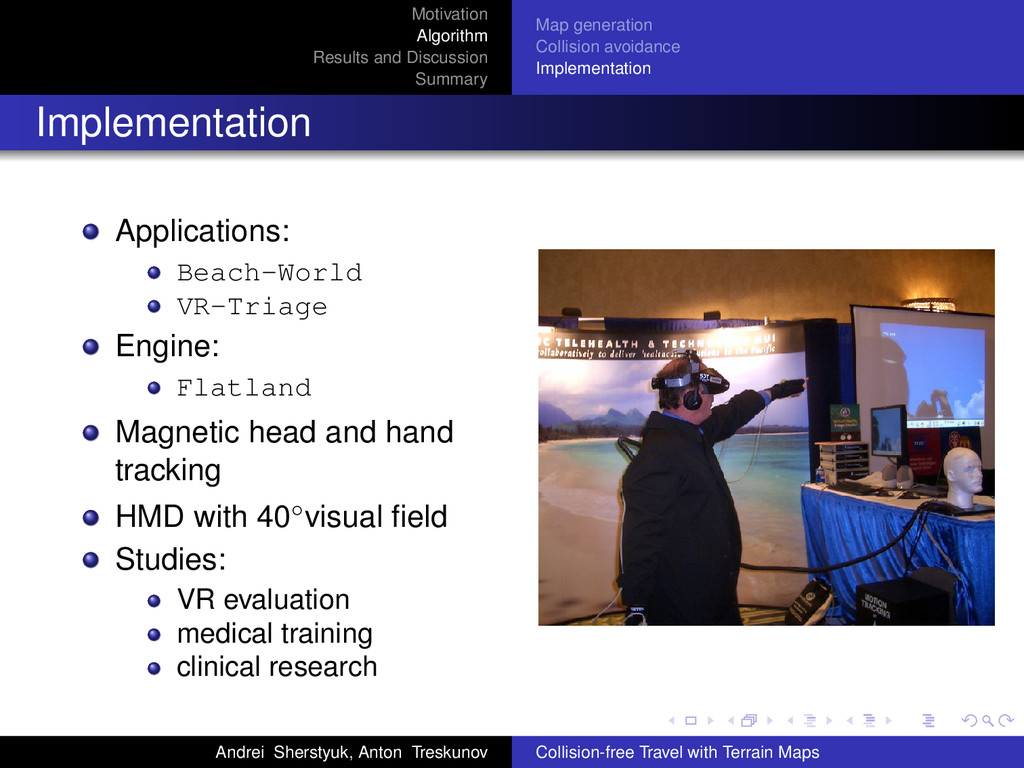
Implementation Implementation Applications: Beach-World VR-Triage Engine: Flatland Magnetic head and hand tracking HMD with 40◦visual field Studies: VR evaluation medical training clinical research Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
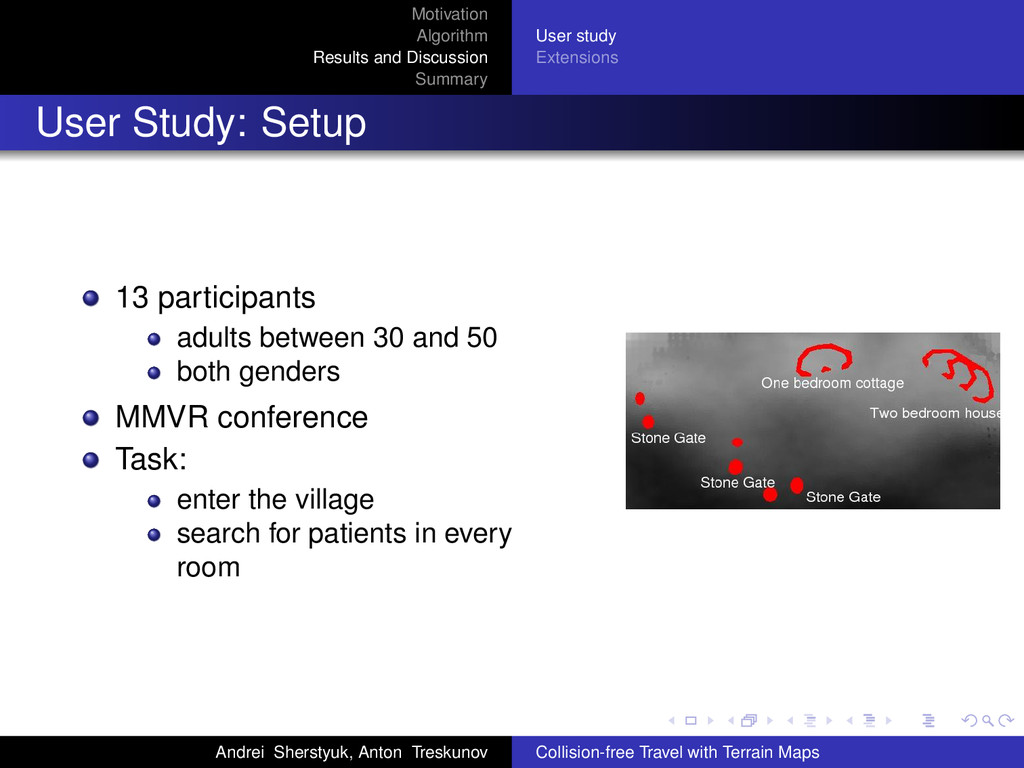
Study: Setup 13 participants adults between 30 and 50 both genders MMVR conference Task: enter the village search for patients in every room Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
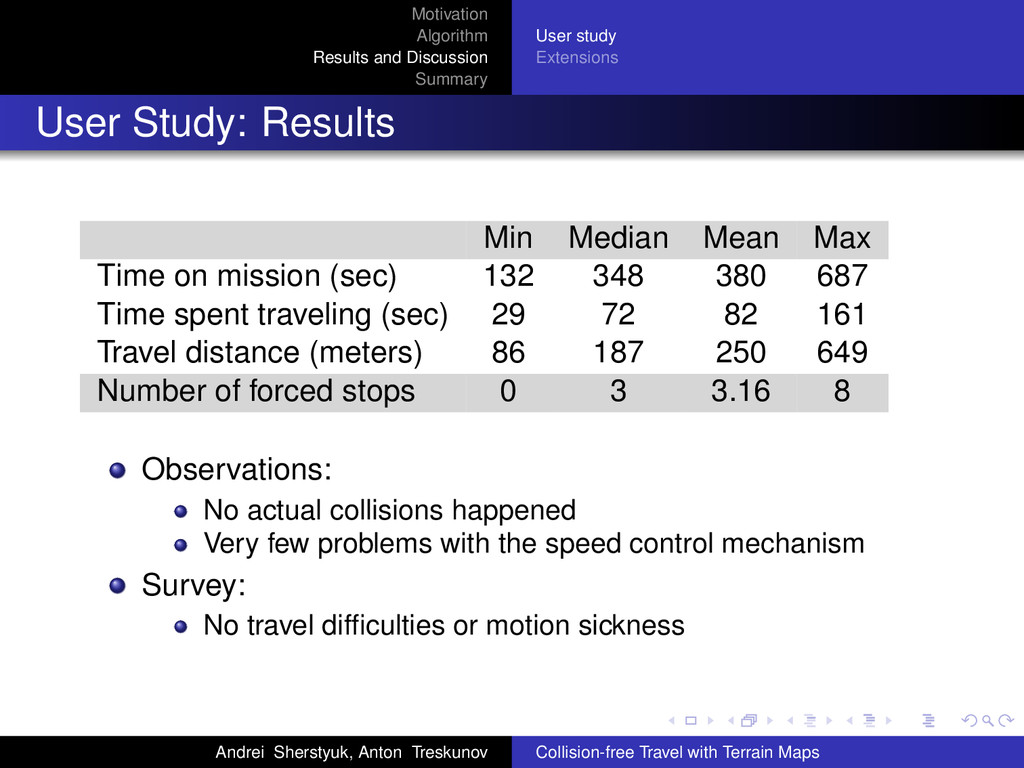
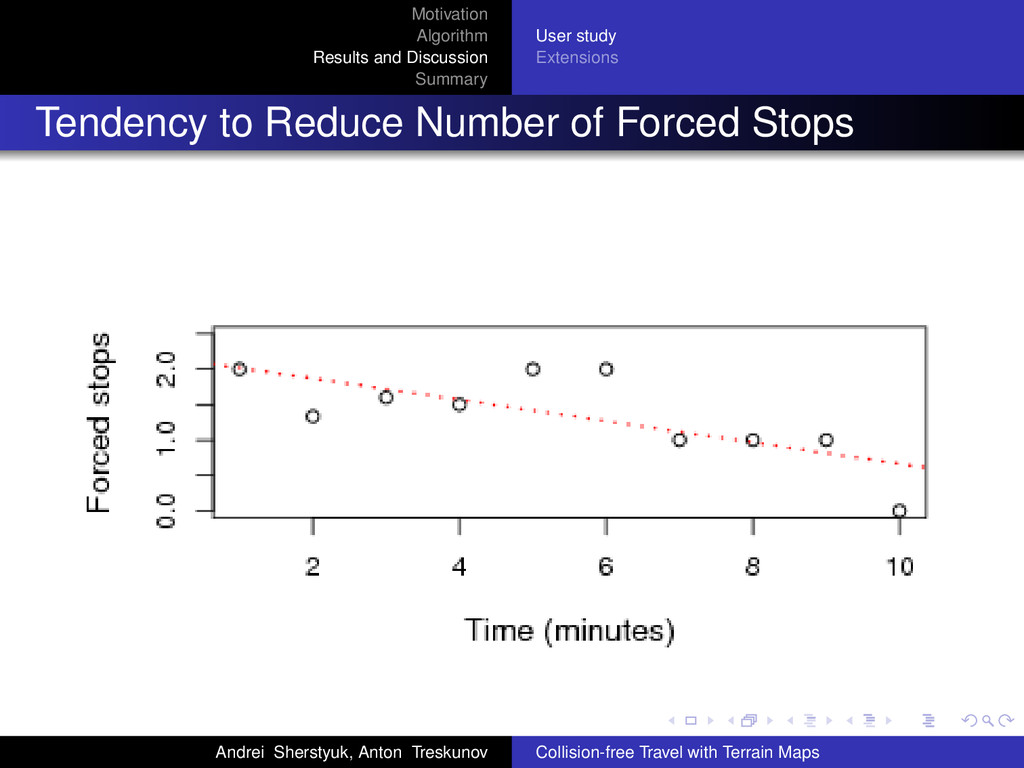
Study: Results Min Median Mean Max Time on mission (sec) 132 348 380 687 Time spent traveling (sec) 29 72 82 161 Travel distance (meters) 86 187 250 649 Number of forced stops 0 3 3.16 8 Observations: No actual collisions happened Very few problems with the speed control mechanism Survey: No travel difficulties or motion sickness Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
Possible usage of Terrain Maps Location-based lighting control (directional light vs spot head lamp) No-teleportation zones (out-coming as well as incoming) Range values, e.g. volumes of specific sounds: waves, birds... Simple image editor may be used for fast prototyping. Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
static layout terrain based VR scenes Flat cost collision detection Speed control algorithm, which is easy to integrate into existing travel techniques: steering-by-pointing, steering-by-joystick, teleportation Proposed independent treatment of color channels in terrain maps Andrei Sherstyuk, Anton Treskunov Collision-free Travel with Terrain Maps
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}