Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Rotation Group
Search
USAMI Kosuke
November 02, 2019
Science
2.2k
0
Share
Rotation Group
※ Docswell に移行しました
https://www.docswell.com/s/usami-k/K6Y4NM-rotation-group
USAMI Kosuke
November 02, 2019
More Decks by USAMI Kosuke
See All by USAMI Kosuke
Onsager代数とその周辺 / Onsager algebra tsudoi
usamik26
0
700
Apple HIG 正式名称クイズ結果発表 / HIG Quiz Result
usamik26
0
260
ゆめみ大技林製作委員会の立ち上げの話 / daigirin project
usamik26
0
380
@ViewLoadingプロパティラッパの紹介と自前で実装する方法 / @ViewLoading property wrapper implementation
usamik26
0
550
これからUICollectionViewを実践活用する人のためのガイド / Guide to UICollectionView
usamik26
1
810
Xcodeとの最近の付き合い方のはなし / Approach To Xcode
usamik26
2
730
UICollectionView Compositional Layout
usamik26
0
870
Coding Swift with Visual Studio Code and Docker
usamik26
0
580
Swift Extension for Visual Studio Code
usamik26
2
1.1k
Other Decks in Science
See All in Science
People who frequently use ChatGPT for writing tasks are accurate and robust detectors of AI-generated text
rudorudo11
0
250
機械学習 - DBSCAN
trycycle
PRO
0
1.8k
あなたに水耕栽培を愛していないとは言わせない
mutsumix
1
330
【RSJ2025】PAMIQ Core: リアルタイム継続学習のための⾮同期推論・学習フレームワーク
gesonanko
0
880
AI(人工知能)の過去・現在・未来 —AIは人間を超えるのか—
tagtag
PRO
0
120
Endel Tulvingとエピソード記憶
rmaruy
0
130
Conversation is the New Dashboard: 属人性を排除する第4世代BIツールの勢力図
shomaekawa
1
580
プロジェクト「Azayaka」のSARの数式とジオメトリ
syuchimu
0
310
大黒市で発生した大規模インシデント の ポストモーテムから読み解く、 記憶媒体消去の大切さ
shucho0103
0
180
イロレーティングを活用した関東大学サッカーの定量的実力評価 / A quantitative performance evaluation of Kanto University Football Association using Elo rating
konakalab
0
260
中央大学AI・データサイエンスセンター 2025年第6回イブニングセミナー 『知能とはなにか ヒトとAIのあいだ』
tagtag
PRO
0
160
Vibecoding for Product Managers
ibknadedeji
0
170
Featured
See All Featured
Code Review Best Practice
trishagee
74
20k
Self-Hosted WebAssembly Runtime for Runtime-Neutral Checkpoint/Restore in Edge–Cloud Continuum
chikuwait
0
550
The Mindset for Success: Future Career Progression
greggifford
PRO
0
350
Dominate Local Search Results - an insider guide to GBP, reviews, and Local SEO
greggifford
PRO
0
180
Future Trends and Review - Lecture 12 - Web Technologies (1019888BNR)
signer
PRO
0
3.6k
What’s in a name? Adding method to the madness
productmarketing
PRO
24
4.1k
Git: the NoSQL Database
bkeepers
PRO
432
67k
Navigating Weather and Climate Data
rabernat
0
200
The Invisible Side of Design
smashingmag
302
52k
Abbi's Birthday
coloredviolet
2
7.8k
Deep Space Network (abreviated)
tonyrice
0
160
How to Create Impact in a Changing Tech Landscape [PerfNow 2023]
tammyeverts
55
3.4k
Transcript
1/17 回転群のはなし 宇佐見 公輔 第 6 回 関西日曜数学 友の会 宇佐見
公輔 回転群のはなし
2/17 最近の趣味数学 関西日曜数学 友の会: Generalized Onsager algebras(第 5 回 /
2019 年 8 月) ルート系とディンキン図形(第 4 回 / 2019 年 4 月) 日曜数学会: リー代数の計算の楽しみ(マスパーティ / 2019 年 10 月) 関西すうがく徒のつどい: 行列の指数関数(第 12 回 / 2019 年 10 月) 執筆参加: 数学デイズ大阪編:低次元のリー代数をみる(Kindle 版発売中) 宇佐見 公輔 回転群のはなし
3/17 2 次元回転行列 2 次元平面 R2 を考えます。 ある点を、原点を中心として反時計回りに角度 t だけ回転させる
作用は、次の行列であらわされます。 Definition R(t) := cos t − sin t sin t cos t 宇佐見 公輔 回転群のはなし
4/17 2 次元回転行列の積 Proposition 2 次元回転行列について次が成り立ちます。 R(t1)R(t2) = R(t1 +
t2) これは計算すれば確認できます。 宇佐見 公輔 回転群のはなし
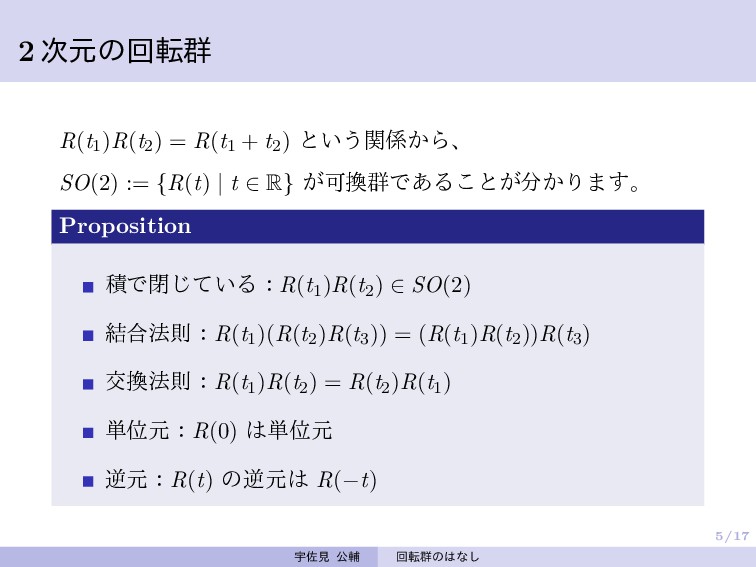
5/17 2 次元の回転群 R(t1)R(t2) = R(t1 + t2) という関係から、 SO(2)
:= {R(t) | t ∈ R} が可換群であることが分かります。 Proposition 積で閉じている:R(t1)R(t2) ∈ SO(2) 結合法則:R(t1)(R(t2)R(t3)) = (R(t1)R(t2))R(t3) 交換法則:R(t1)R(t2) = R(t2)R(t1) 単位元:R(0) は単位元 逆元:R(t) の逆元は R(−t) 宇佐見 公輔 回転群のはなし
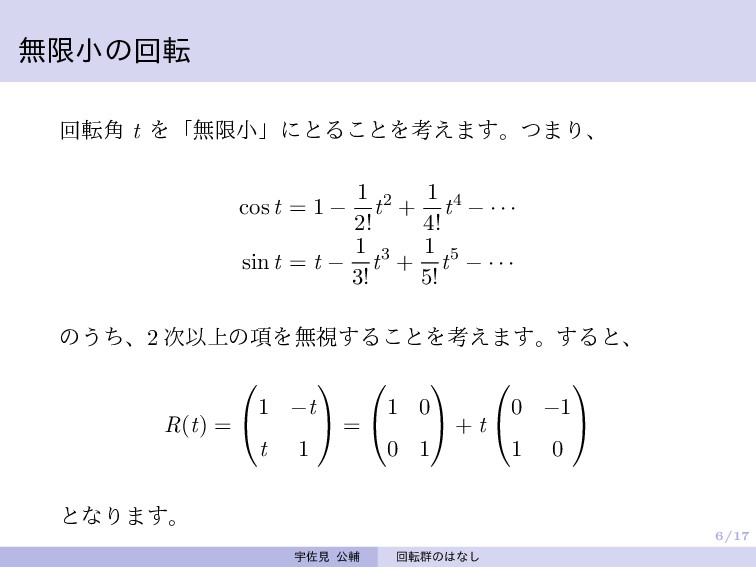
6/17 無限小の回転 回転角 t を「無限小」にとることを考えます。つまり、 cos t = 1 −
1 2! t2 + 1 4! t4 − · · · sin t = t − 1 3! t3 + 1 5! t5 − · · · のうち、2 次以上の項を無視することを考えます。すると、 R(t) = 1 −t t 1 = 1 0 0 1 + t 0 −1 1 0 となります。 宇佐見 公輔 回転群のはなし
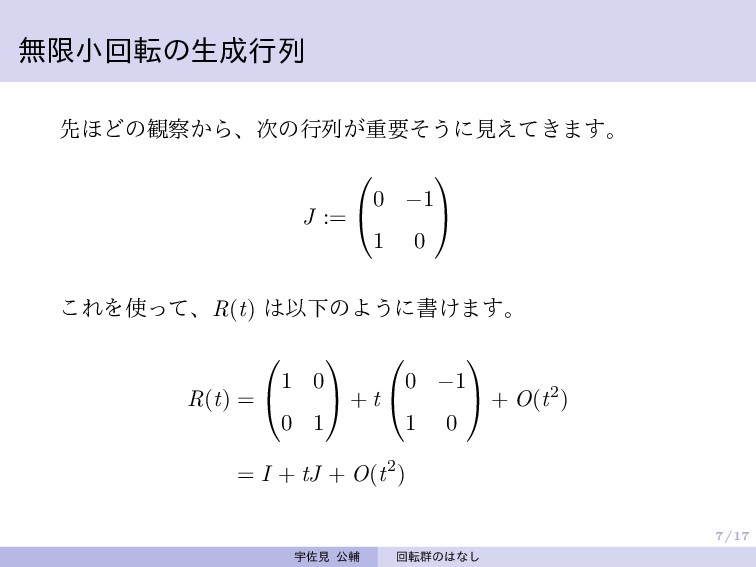
7/17 無限小回転の生成行列 先ほどの観察から、次の行列が重要そうに見えてきます。 J := 0 −1 1
0 これを使って、R(t) は以下のように書けます。 R(t) = 1 0 0 1 + t 0 −1 1 0 + O(t2) = I + tJ + O(t2) 宇佐見 公輔 回転群のはなし
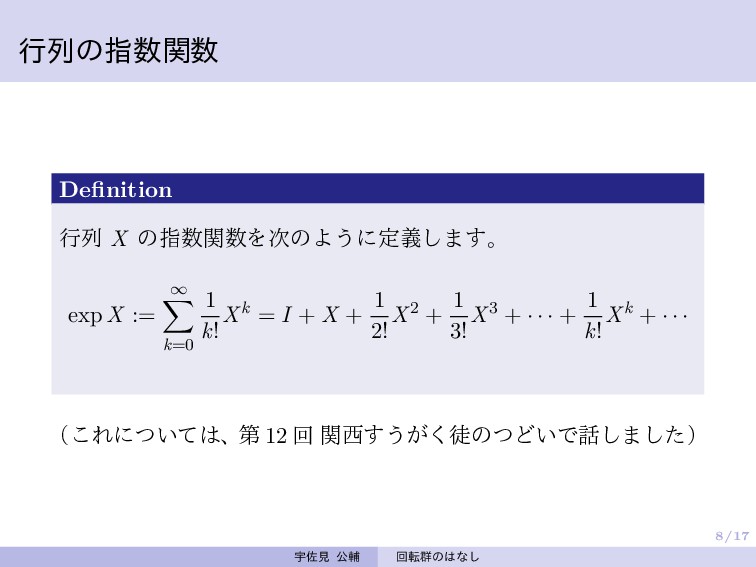
8/17 行列の指数関数 Definition 行列 X の指数関数を次のように定義します。 exp X := ∞
k=0 1 k! Xk = I + X + 1 2! X2 + 1 3! X3 + · · · + 1 k! Xk + · · · (これについては、第 12 回 関西すうがく徒のつどいで話しました) 宇佐見 公輔 回転群のはなし
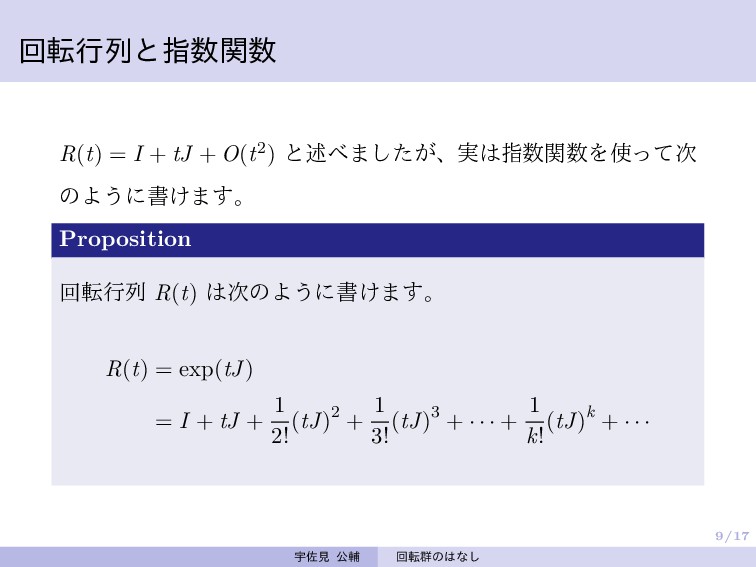
9/17 回転行列と指数関数 R(t) = I + tJ + O(t2) と述べましたが、実は指数関数を使って次
のように書けます。 Proposition 回転行列 R(t) は次のように書けます。 R(t) = exp(tJ) = I + tJ + 1 2! (tJ)2 + 1 3! (tJ)3 + · · · + 1 k! (tJ)k + · · · 宇佐見 公輔 回転群のはなし
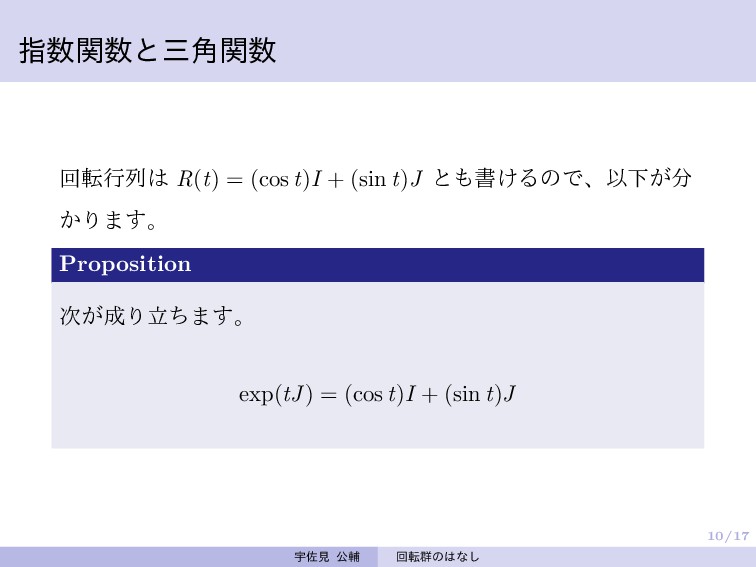
10/17 指数関数と三角関数 回転行列は R(t) = (cos t)I + (sin t)J
とも書けるので、以下が分 かります。 Proposition 次が成り立ちます。 exp(tJ) = (cos t)I + (sin t)J 宇佐見 公輔 回転群のはなし
11/17 3 次元の回転 3 次元空間 R3 での回転はもう少し複雑になります。 2 次元の場合は、原点を通る回転軸(回転面に対して垂直な直線) がひとつだけでした。2
次元の回転は回転角という 1 パラメータ であらわせました。 3 次元の場合は、原点を通る回転軸がひとつではありません。回 転軸の向きを決めるためにパラメータを 2 つ使うため、回転角と 合わせて 3 つのパラメータが必要になります。 宇佐見 公輔 回転群のはなし
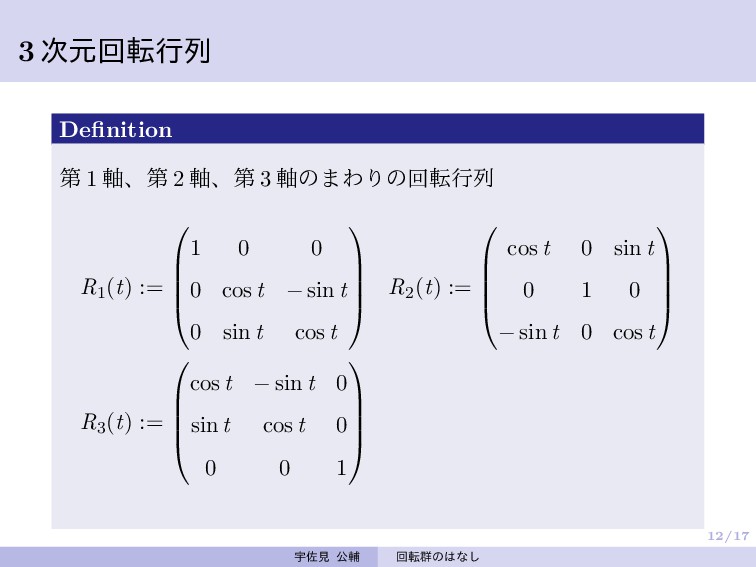
12/17 3 次元回転行列 Definition 第 1 軸、第 2 軸、第 3
軸のまわりの回転行列 R1(t) := 1 0 0 0 cos t − sin t 0 sin t cos t R2(t) := cos t 0 sin t 0 1 0 − sin t 0 cos t R3(t) := cos t − sin t 0 sin t cos t 0 0 0 1 宇佐見 公輔 回転群のはなし
13/17 3 次元の回転の行列表示 3 次元の回転をひとつの行列で具体的に書こうとすると、少しや やこしい式になります。 しかし、3 次元の回転は R1(t), R2(t),
R3(t) の積であらわすこと ができます。 そのため、この 3 つの回転行列をおさえることで 3 次元の回転群 の本質を知ることができます。 宇佐見 公輔 回転群のはなし
14/17 再び無限小の回転 回転角 t の「無限小」を考えます(t の 2 次以上を無視) 。 R3(t)
= 1 −t 0 t 1 0 0 0 1 = 1 0 0 0 1 0 0 0 1 + t 0 −1 0 1 0 0 0 0 0 = I + tJ3 (J3 をそのように定義する) 宇佐見 公輔 回転群のはなし
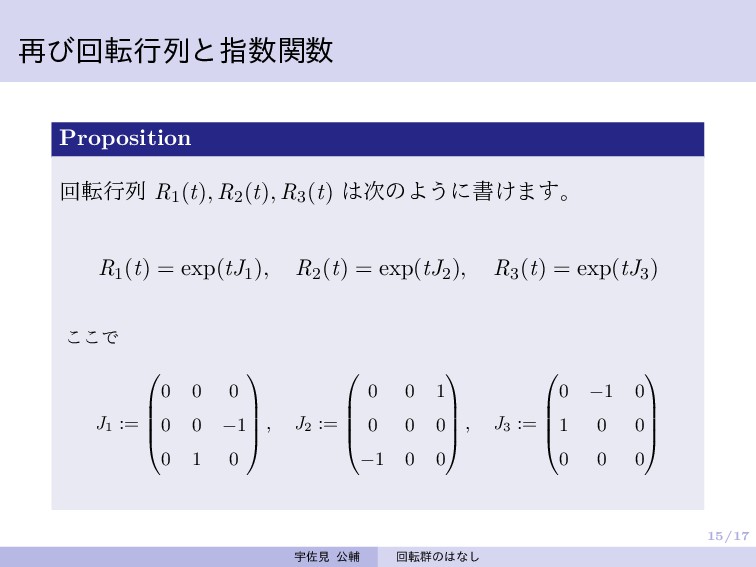
15/17 再び回転行列と指数関数 Proposition 回転行列 R1(t), R2(t), R3(t) は次のように書けます。 R1(t) =
exp(tJ1), R2(t) = exp(tJ2), R3(t) = exp(tJ3) ここで J1 := 0 0 0 0 0 −1 0 1 0 , J2 := 0 0 1 0 0 0 −1 0 0 , J3 := 0 −1 0 1 0 0 0 0 0 宇佐見 公輔 回転群のはなし
16/17 3 次元回転の生成行列の関係 Proposition J1, J2, J3 の間には次の関係があります。 [J1, J2]
= −J3 [J2, J3] = −J1 [J3, J1] = −J2 (ここで [X, Y ] := XY − YX) 宇佐見 公輔 回転群のはなし
17/17 さらなる話題 回転行列は、簡単な形の行列から指数関数で生成される 生成行列には、交代子積によってリー代数の構造がある そのリー代数を調べることで回転群のことがわかる 宇佐見 公輔 回転群のはなし
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![16/17 3 次元回転の生成行列の関係 Proposition J1, J2, J3 の間には次の関係があります。 [J1, J2]](https://files.speakerdeck.com/presentations/eac6746f14ee40aa96ae2f6e420a3fe4/slide_15.jpg){kind=link}
{kind=link}