Maps 金田 佑哉 ETA Prediction with Graph Neural Networks in Google Maps(arXiv ver.) ETA Prediction with Graph Neural Networks in Google Maps(ar5iv ver.) deepmindブログ
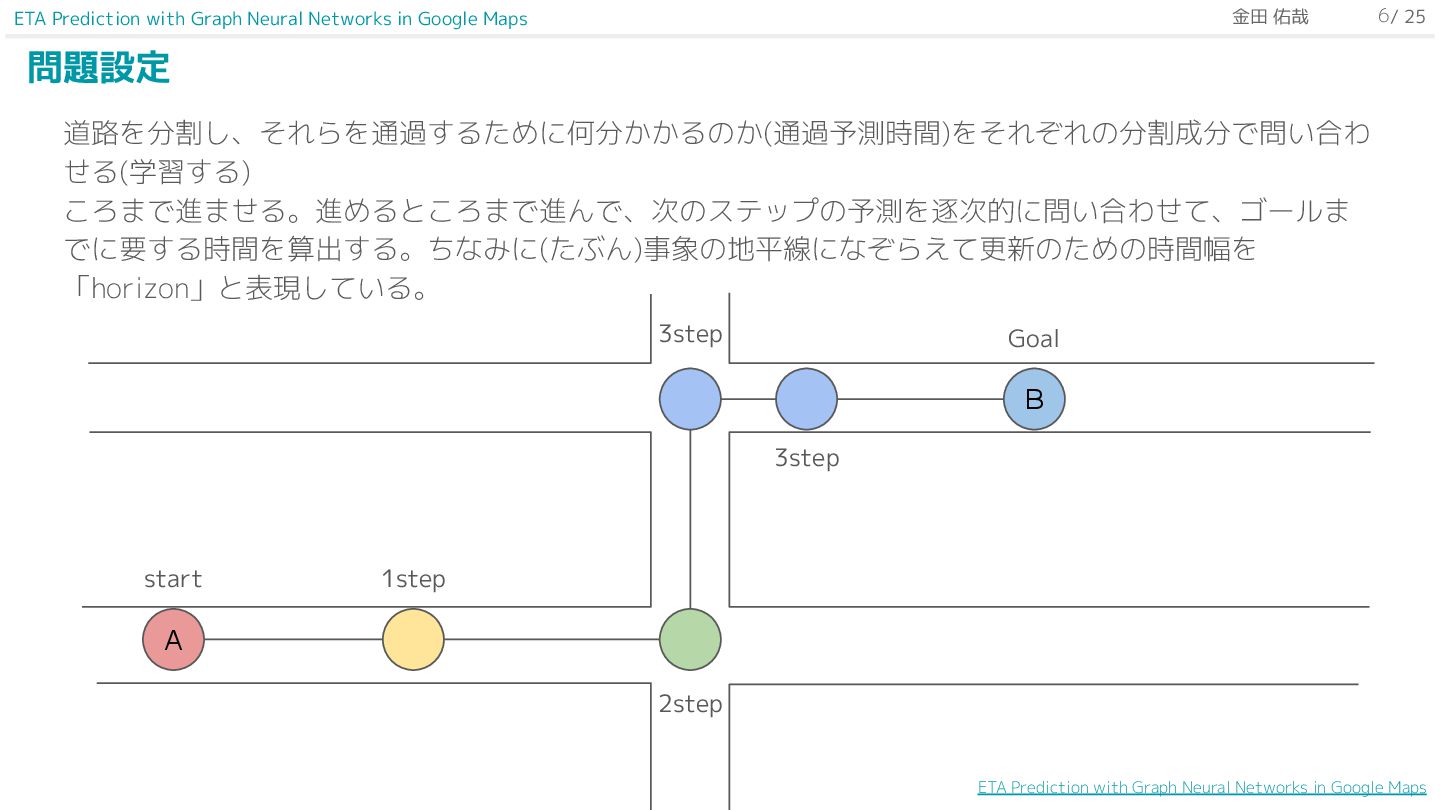
in Google Maps 問題設定 道路を分割し、それらを通過するために何分かかるのか(通過予測時間)をそれぞれの分割成分で問い合わ せる(学習する)。通過予測時間の更新のためにあらかじめ時間幅を定めておき、次の時間幅まで進めると ころまで進ませる。進めるところまで進んで、次のステップの予測を逐次的に問い合わせて、ゴールま でに要する時間を算出する。ちなみに(たぶん)事象の地平線になぞらえて更新のための時間幅を 「horizon」と表現している。 6 ETA Prediction with Graph Neural Networks in Google Maps A B start 1step 2step 3step 3step Goal
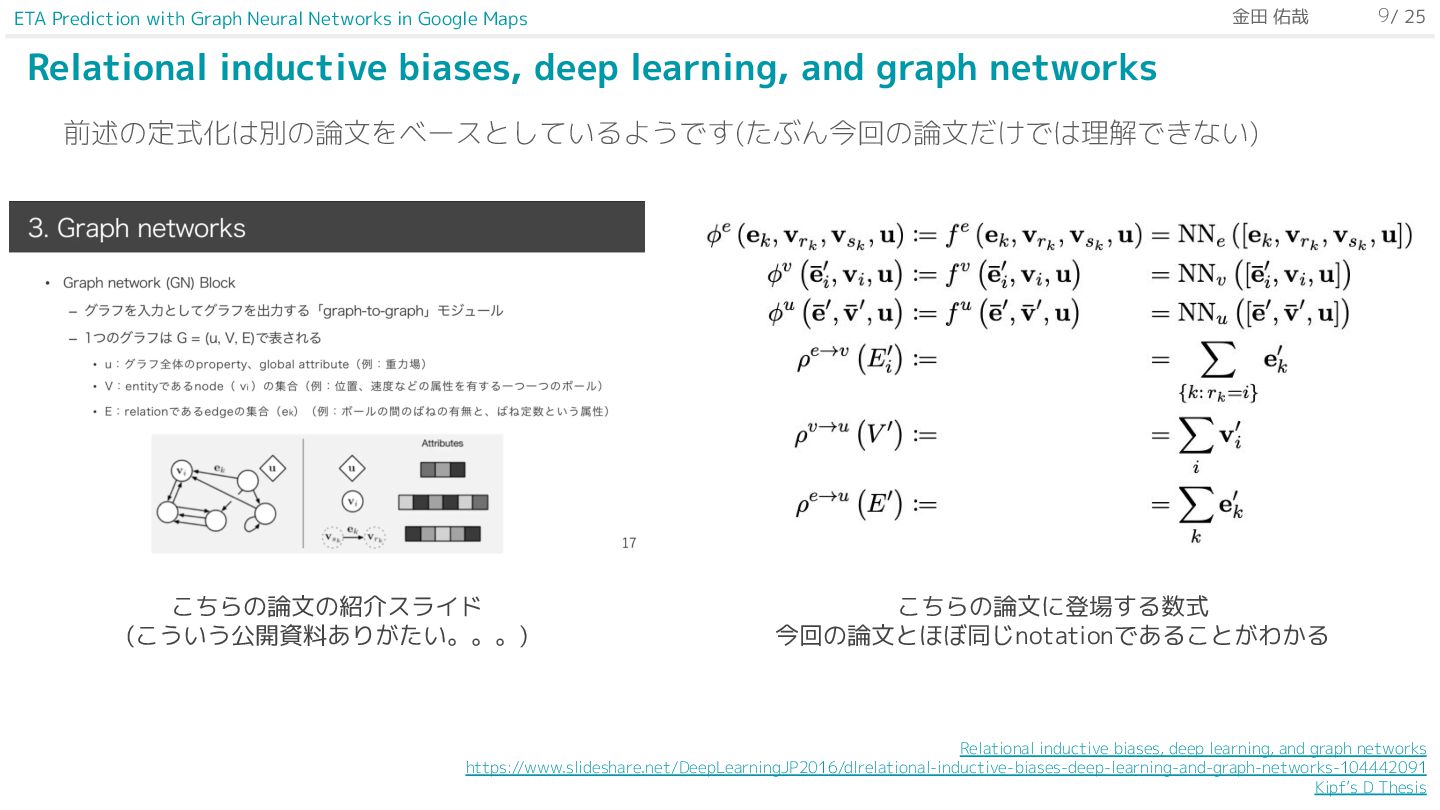
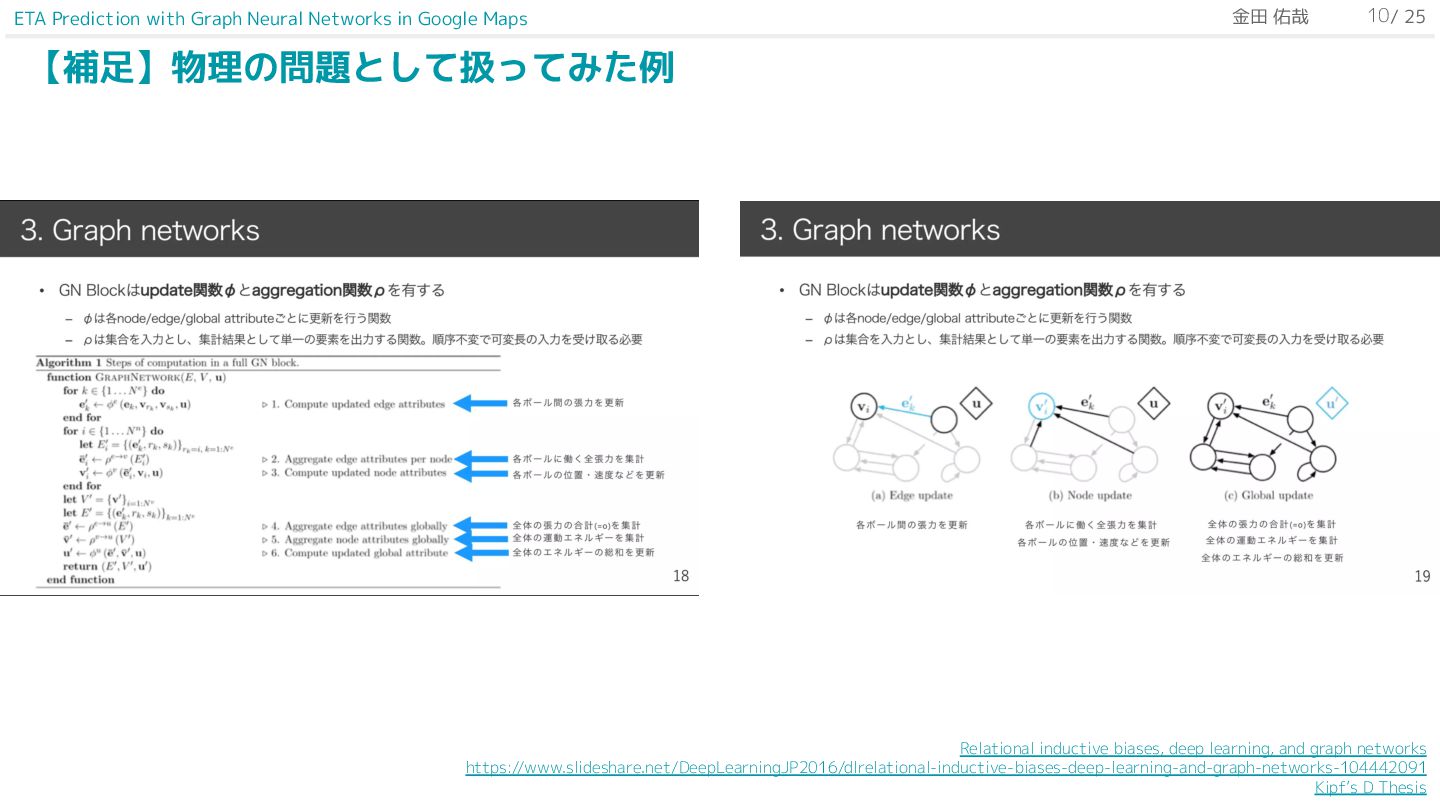
in Google Maps こちらの論文の紹介スライド (こういう公開資料ありがたい。。。) Relational inductive biases, deep learning, and graph networks 前述の定式化は別の論文をベースとしているようです(たぶん今回の論文だけでは理解できない)。 9 Relational inductive biases, deep learning, and graph networks https://www.slideshare.net/DeepLearningJP2016/dlrelational-inductive-biases-deep-learning-and-graph-networks-104442091 Kipf’s D Thesis こちらの論文に登場する数式 今回の論文とほぼ同じnotationであることがわかる
in Google Maps 【補足】物理の問題として扱ってみた例 10 Relational inductive biases, deep learning, and graph networks https://www.slideshare.net/DeepLearningJP2016/dlrelational-inductive-biases-deep-learning-and-graph-networks-104442091 Kipf’s D Thesis
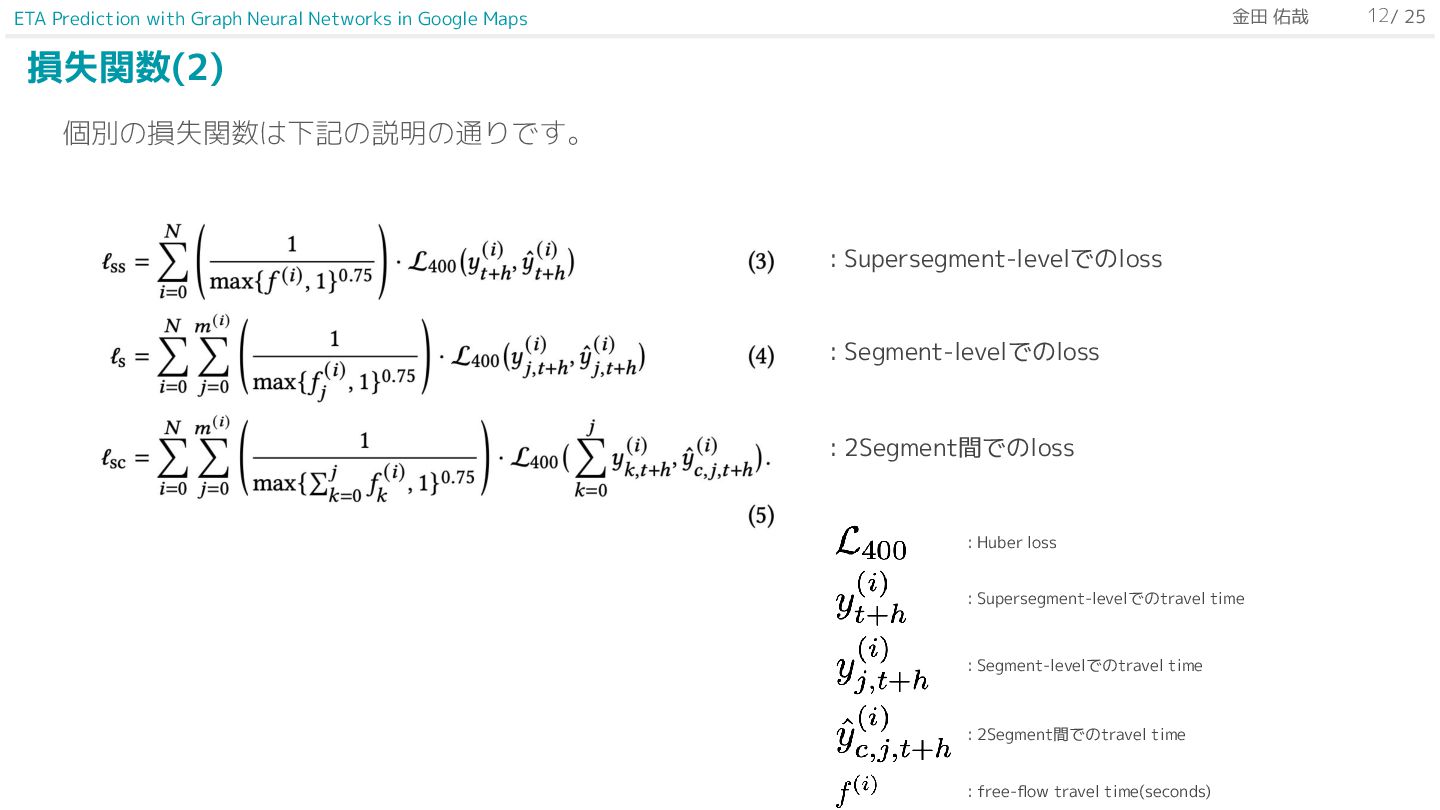
in Google Maps 損失関数(2) 個別の損失関数は下記の説明の通りです。 12 : Huber loss : Supersegment-levelでのtravel time : Segment-levelでのtravel time : 2Segment間でのtravel time : free-flow travel time(seconds) : Supersegment-levelでのloss : Segment-levelでのloss : 2Segment間でのloss
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}