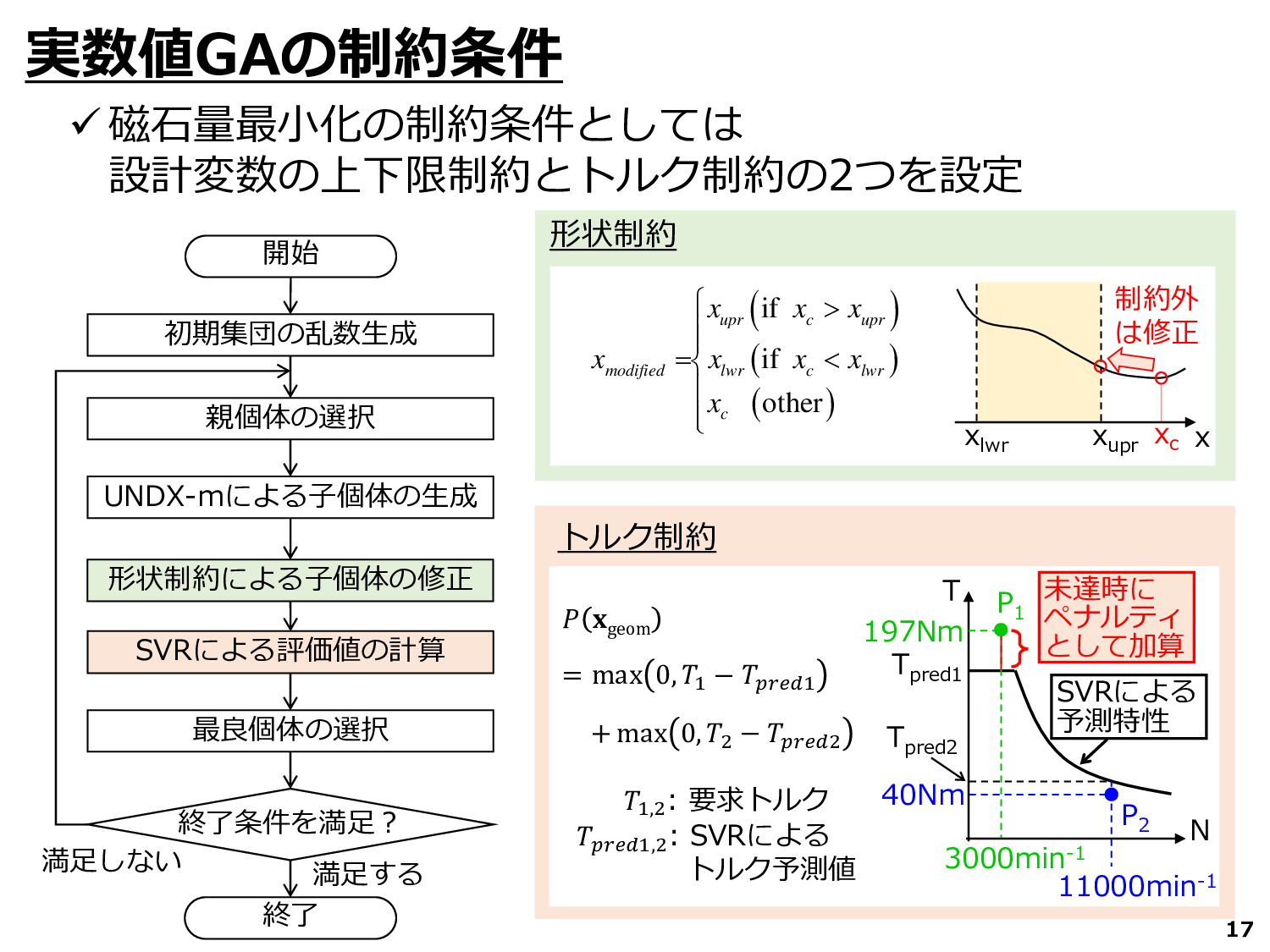
) if if other upr c upr modified lwr c lwr c x x x x x x x x = x 形状制約 x upr x lwr x c 制約外 は修正 トルク制約 𝑃 𝐱geom = max 0, 𝑇1 − 𝑇𝑝𝑟𝑒𝑑1 + max 0, 𝑇2 − 𝑇𝑝𝑟𝑒𝑑2 𝑇1,2 : 要求トルク 𝑇𝑝𝑟𝑒𝑑1,2 : SVRによる トルク予測値 N T P 2 11000min-1 P 1 40Nm 197Nm 3000min-1 未達時に ペナルティ として加算 SVRによる 予測特性 T pred1 T pred2 開始 初期集団の乱数生成 満足しない 終了 満足する 親個体の選択 UNDX-mによる子個体の生成 形状制約による子個体の修正 SVRによる評価値の計算 最良個体の選択 終了条件を満足?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}