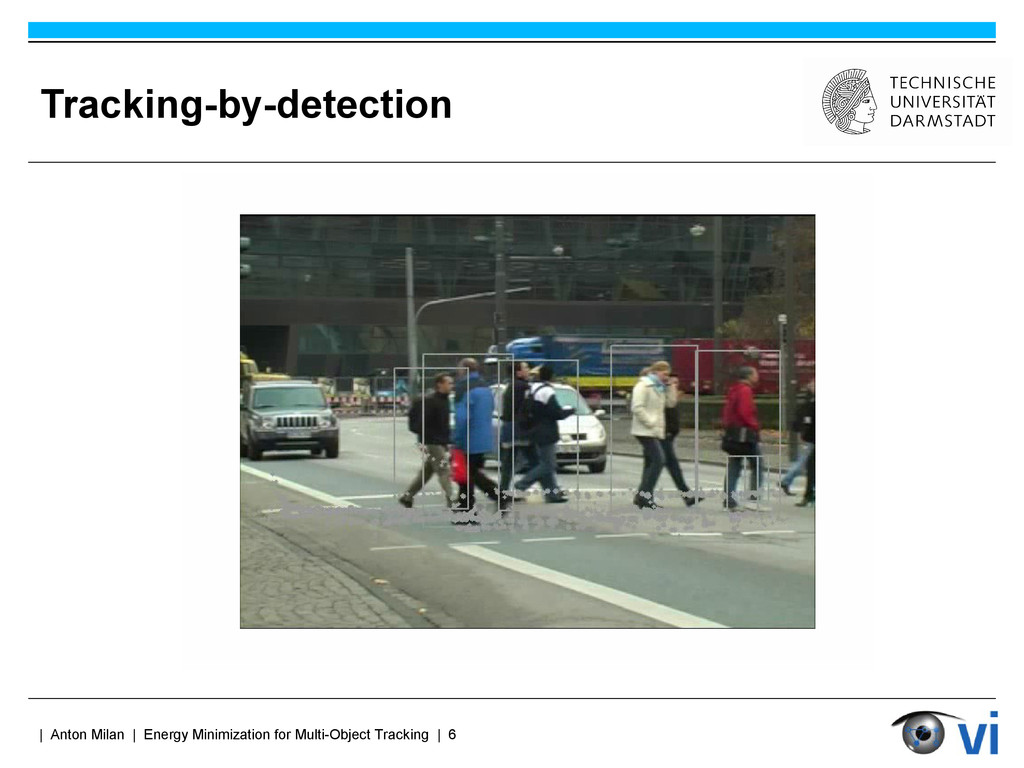
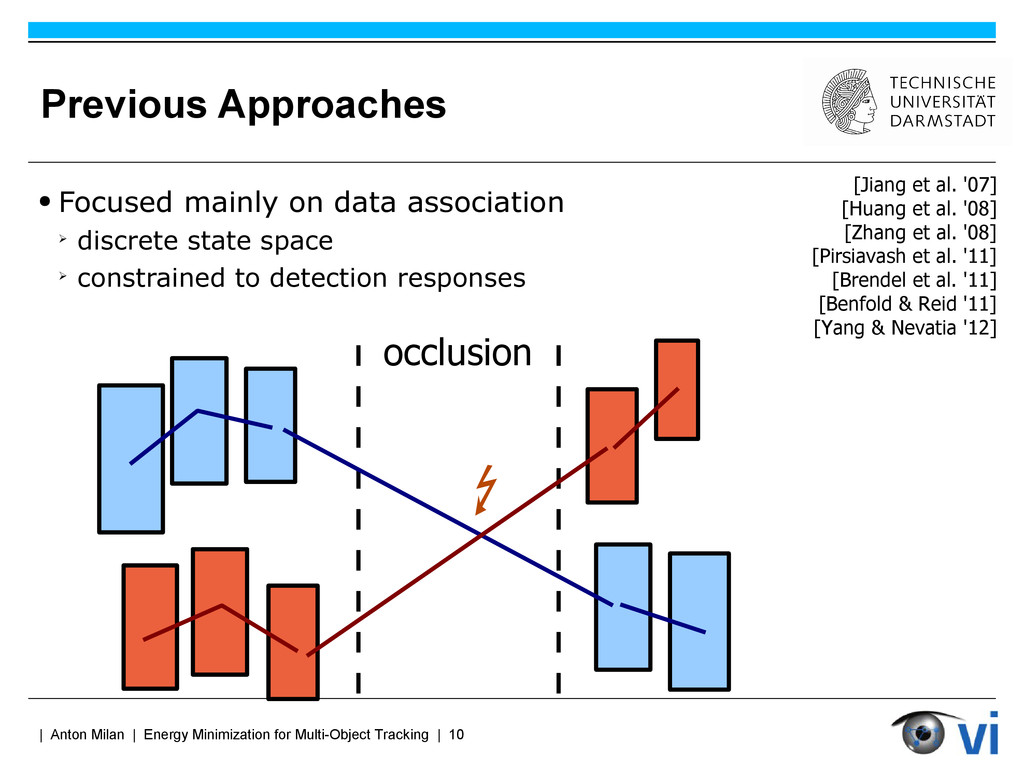
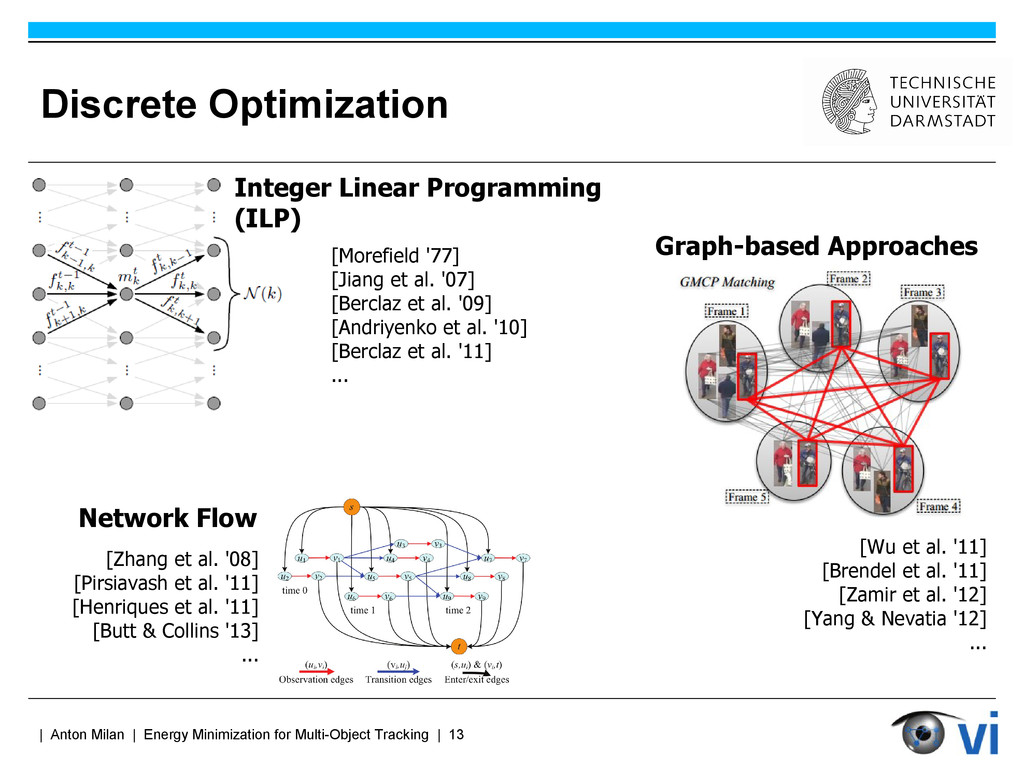
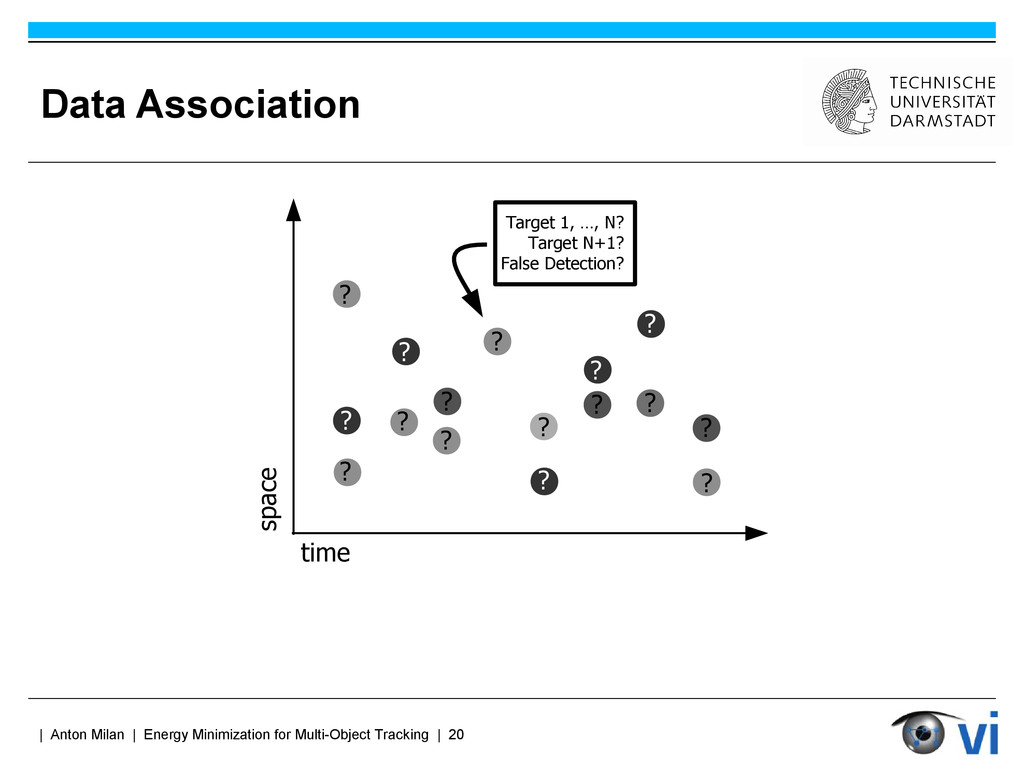
10 Previous Approaches • Focused mainly on data association ➢ discrete state space ➢ constrained to detection responses [Jiang et al. '07] [Huang et al. '08] [Zhang et al. '08] [Pirsiavash et al. '11] [Brendel et al. '11] [Benfold & Reid '11] [Yang & Nevatia '12] occlusion
11 Energy-based Multi-Target Tracking • Goal: Design an energy function that ➢ accurately represents the problem at hand, • complete and appropriate state representation ➢ captures important aspects / dependencies, • dynamics, exclusion, occlusion,... ➢ can be optimized efficiently. • global or “strong” local minima
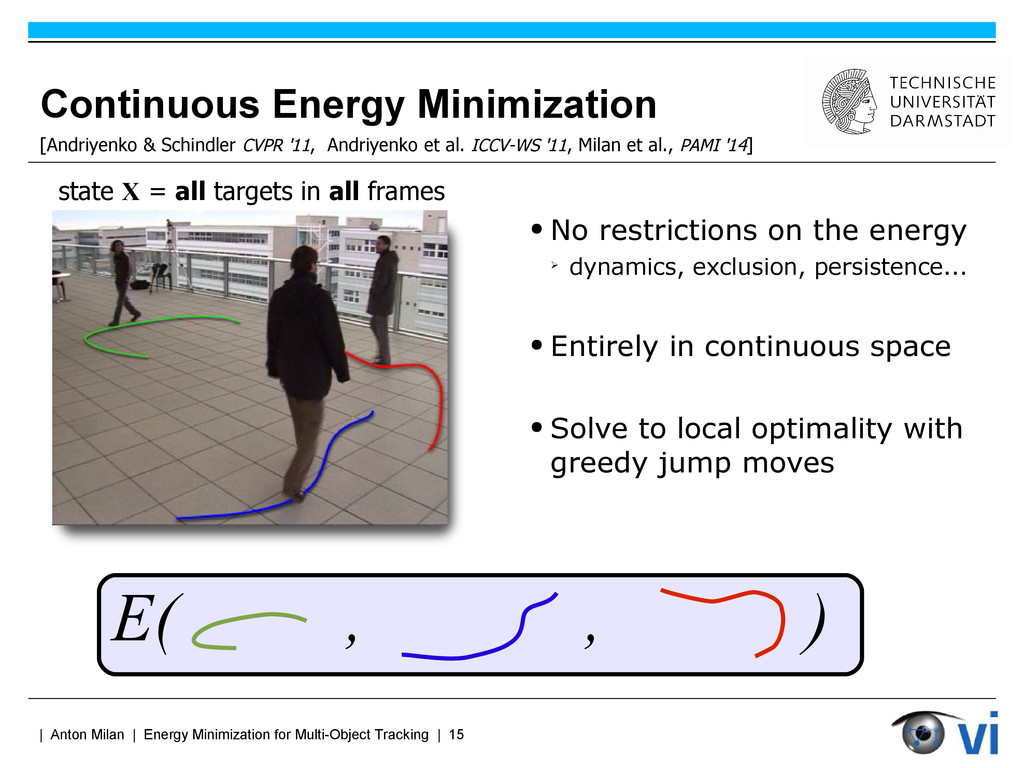
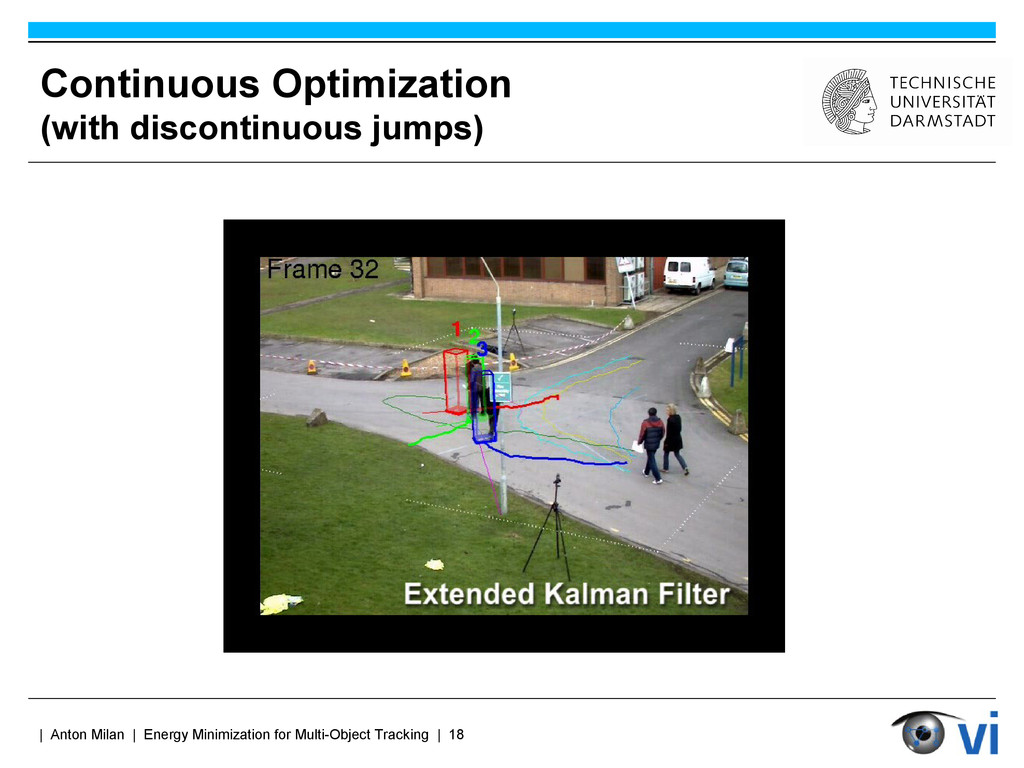
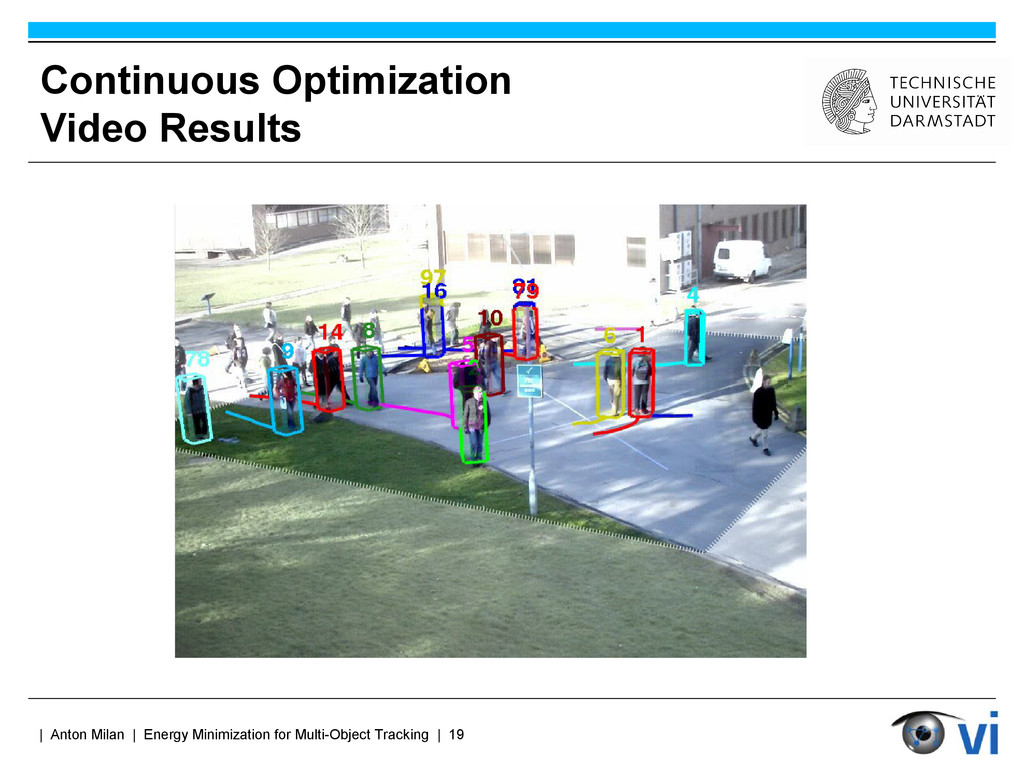
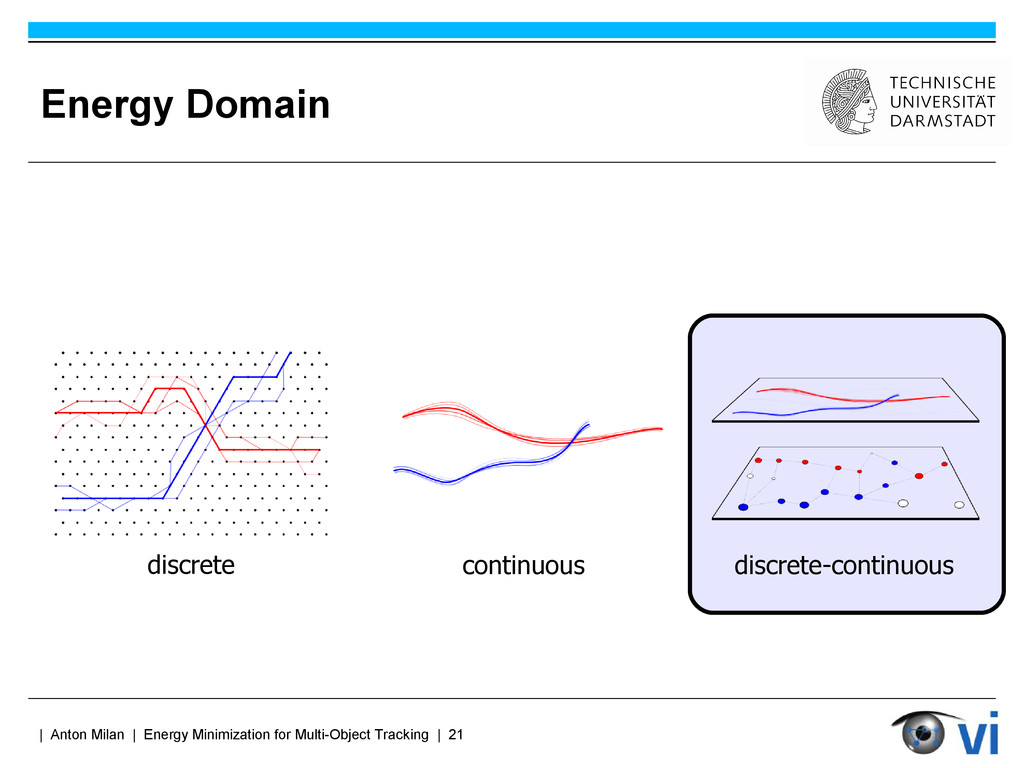
15 Continuous Energy Minimization state X = all targets in all frames E( , , ) [Andriyenko & Schindler CVPR '11, Andriyenko et al. ICCV-WS '11, Milan et al., PAMI '14] • No restrictions on the energy ➢ dynamics, exclusion, persistence... • Entirely in continuous space • Solve to local optimality with greedy jump moves
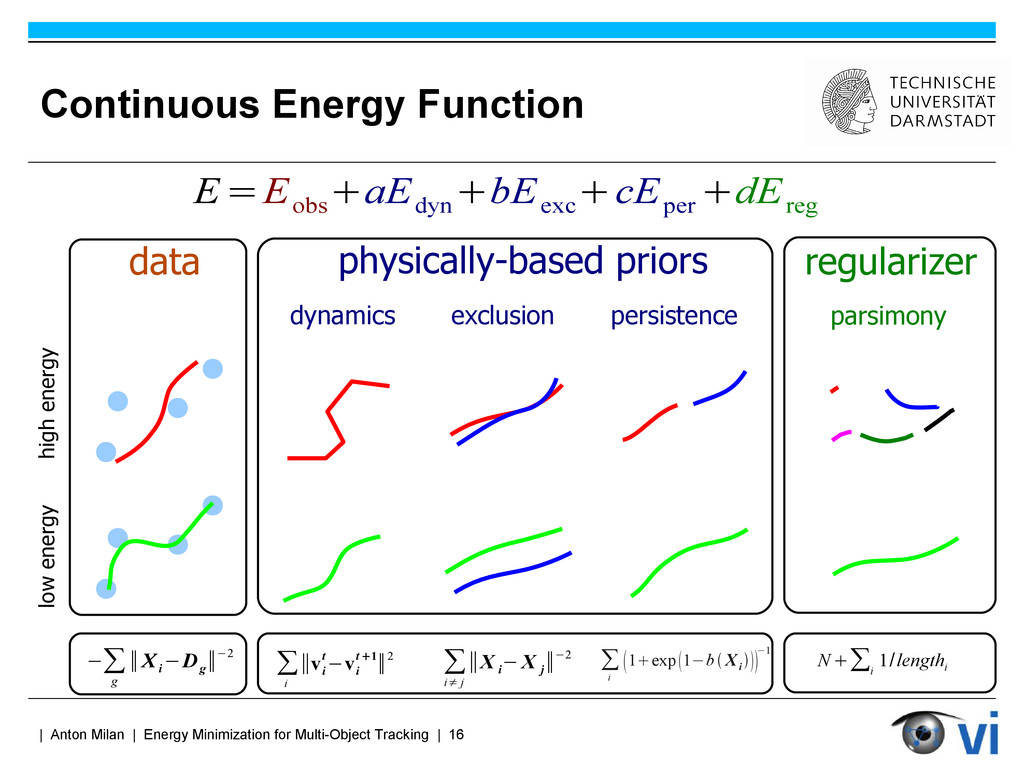
16 Continuous Energy Function E =E obs +aE dyn +bE exc +cE per +dE reg data physically-based priors regularizer dynamics exclusion persistence parsimony high energy low energy ∑ i≠ j ∣ ∣X i −X j ∣ ∣−2 −∑ g ∣ ∣X i −D g ∣ ∣−2 ∑ i ∣ ∣v i t −v i t 1∣ ∣2 N+∑ i 1/length i ∑ i 1exp1−b X i −1
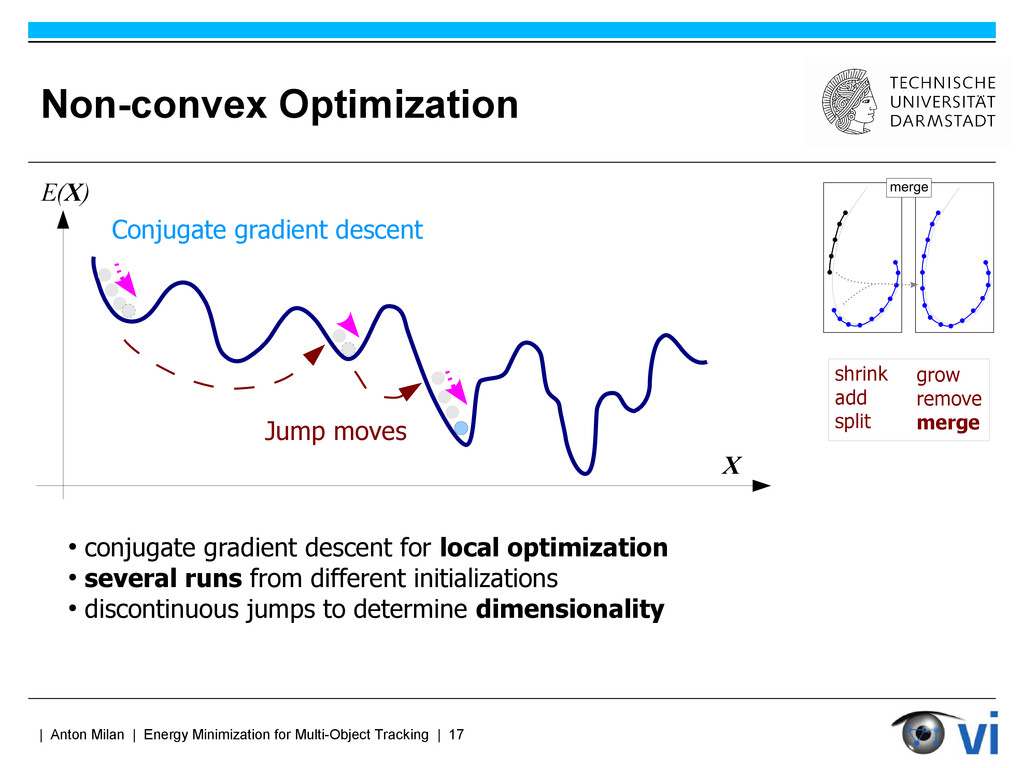
17 Non-convex Optimization • conjugate gradient descent for local optimization • several runs from different initializations • discontinuous jumps to determine dimensionality shrink add split E(X) X Jump moves Conjugate gradient descent grow remove merge
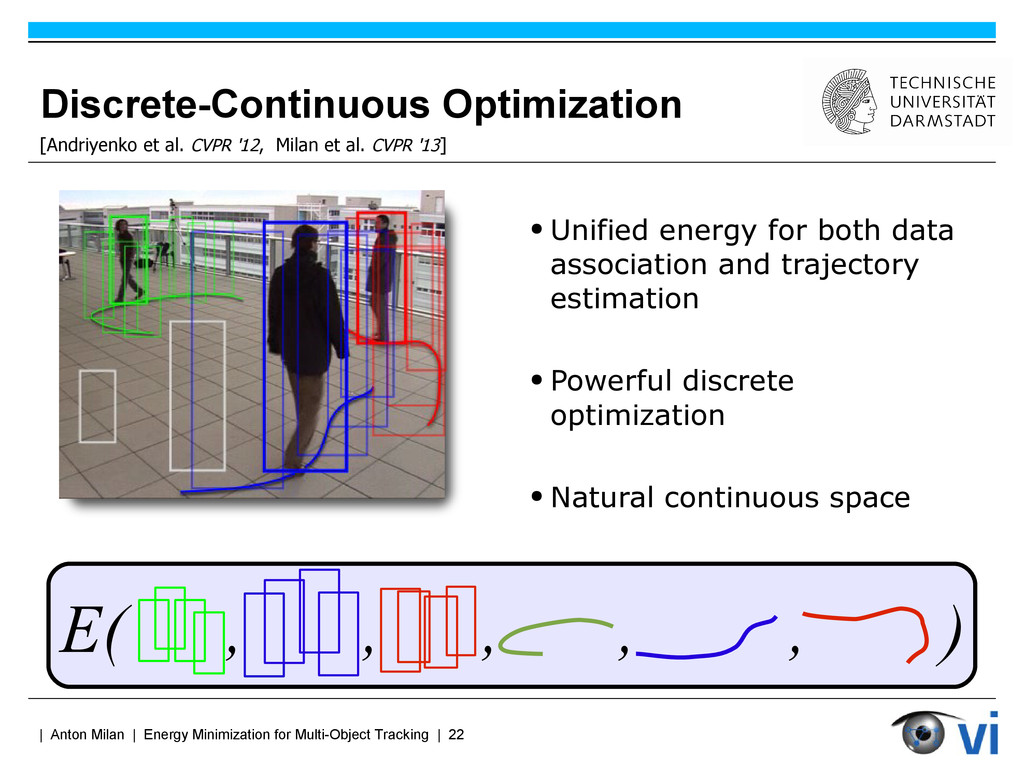
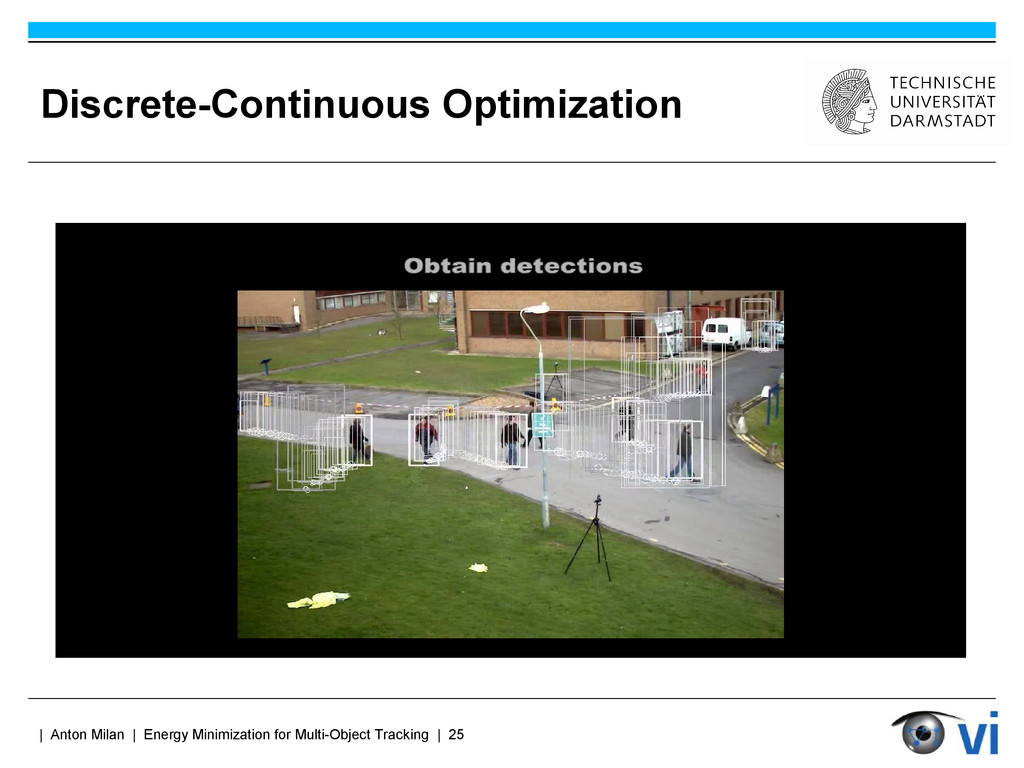
22 Discrete-Continuous Optimization E( , , , , , ) [Andriyenko et al. CVPR '12, Milan et al. CVPR '13] • Unified energy for both data association and trajectory estimation • Powerful discrete optimization • Natural continuous space
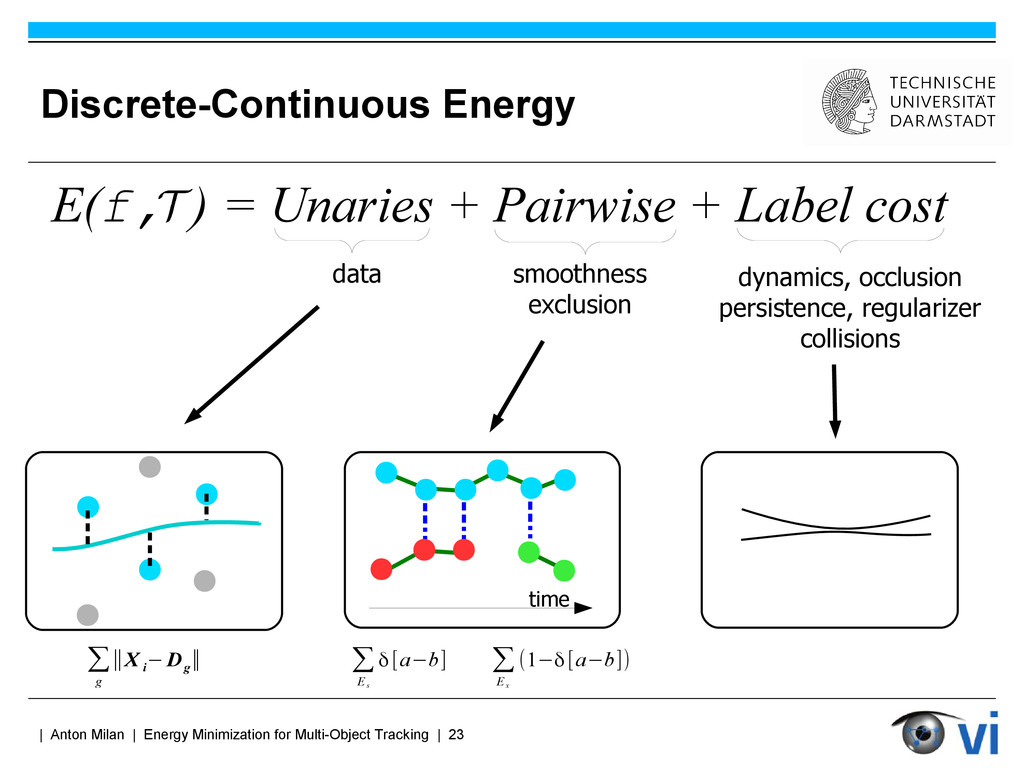
23 Discrete-Continuous Energy E(f, ) = Unaries + Pairwise + Label cost data smoothness exclusion dynamics, occlusion persistence, regularizer collisions time ∑ g ∣ ∣X i −D g ∣ ∣ ∑ E s δ[a−b] ∑ E x (1−δ[a−b])
27 Summary • Continuous Energy Minimization ✔ Accurate representation and modeling ✔ State-of-the-art results despite local optima ✗ No explicit data association • Discrete-Continuous Energy Minimization ✔ Unified energy for data association and trajectory estimation ✔ Powerful discrete optimization techniques can be applied ✔ Accurate and complete state representation
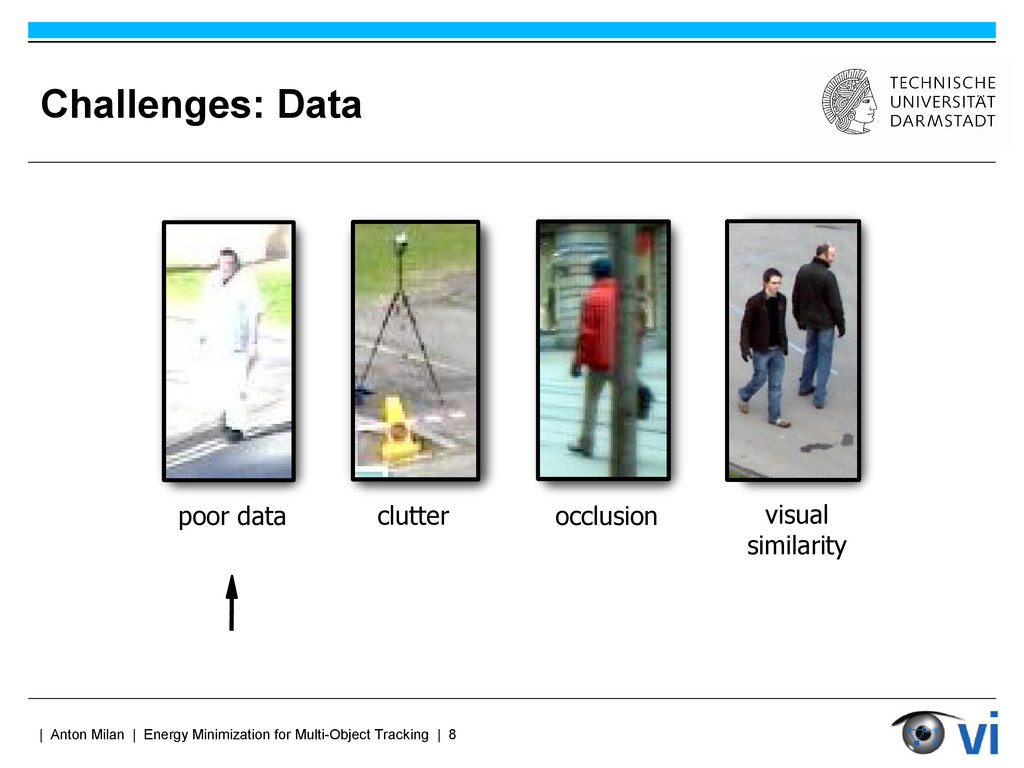
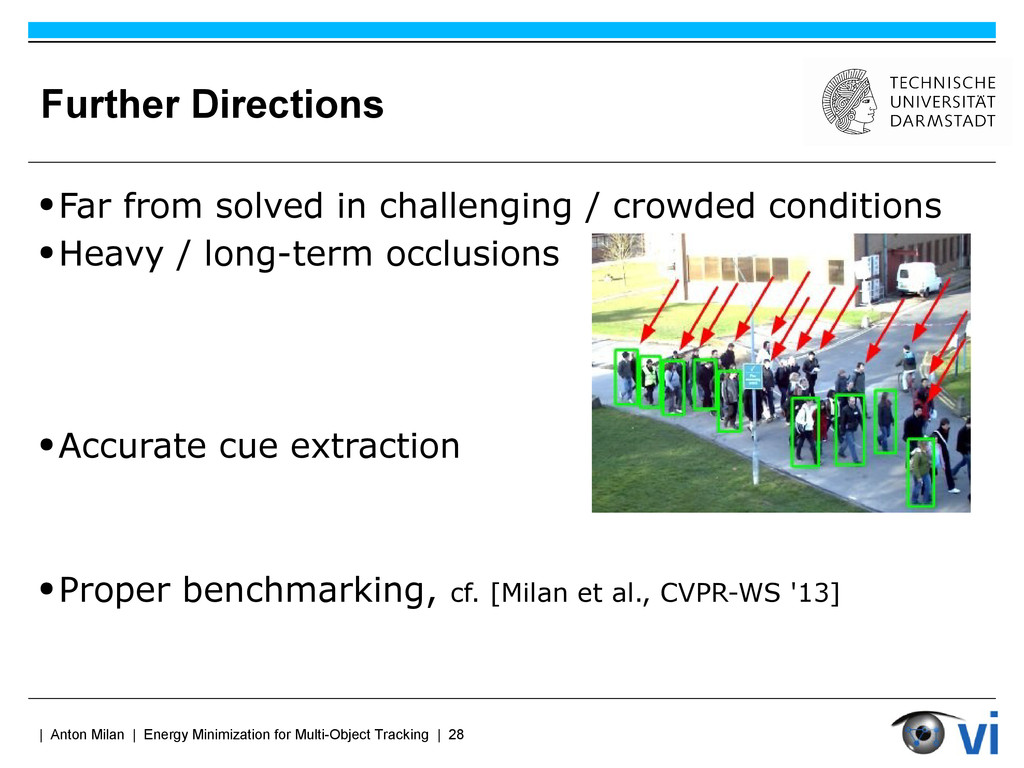
28 Further Directions • Far from solved in challenging / crowded conditions • Heavy / long-term occlusions • Accurate cue extraction • Proper benchmarking, cf. [Milan et al., CVPR-WS '13]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}