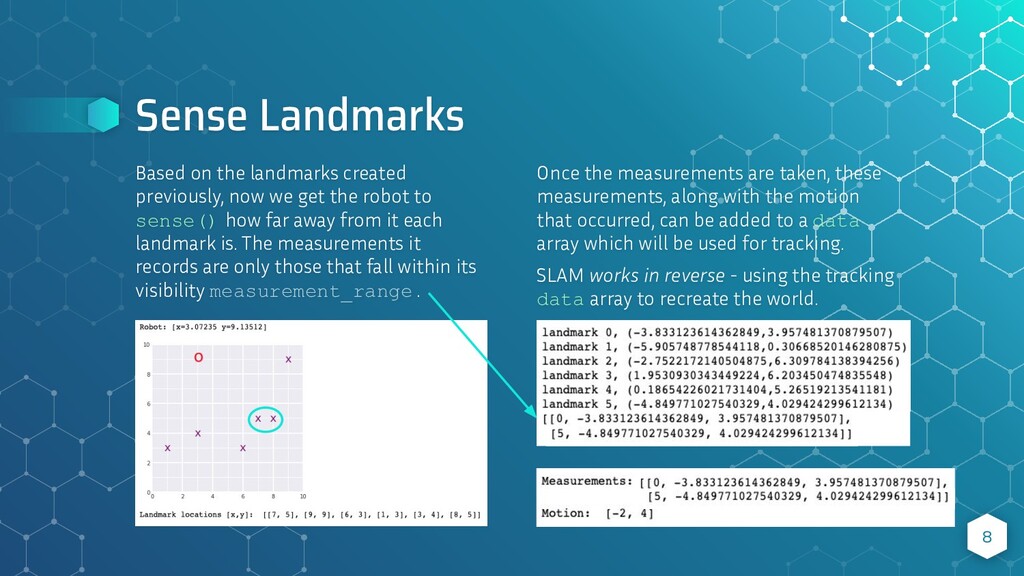
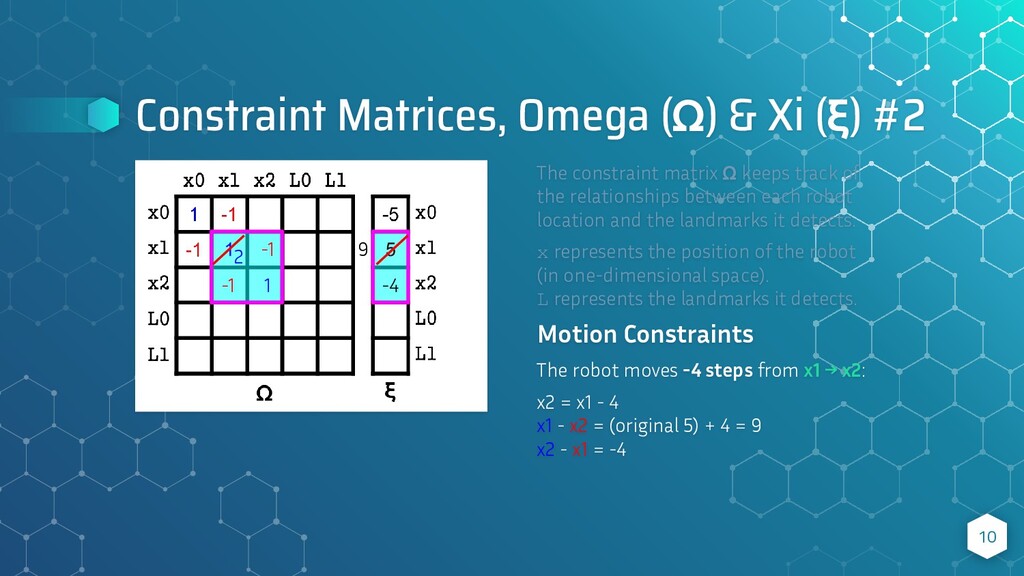
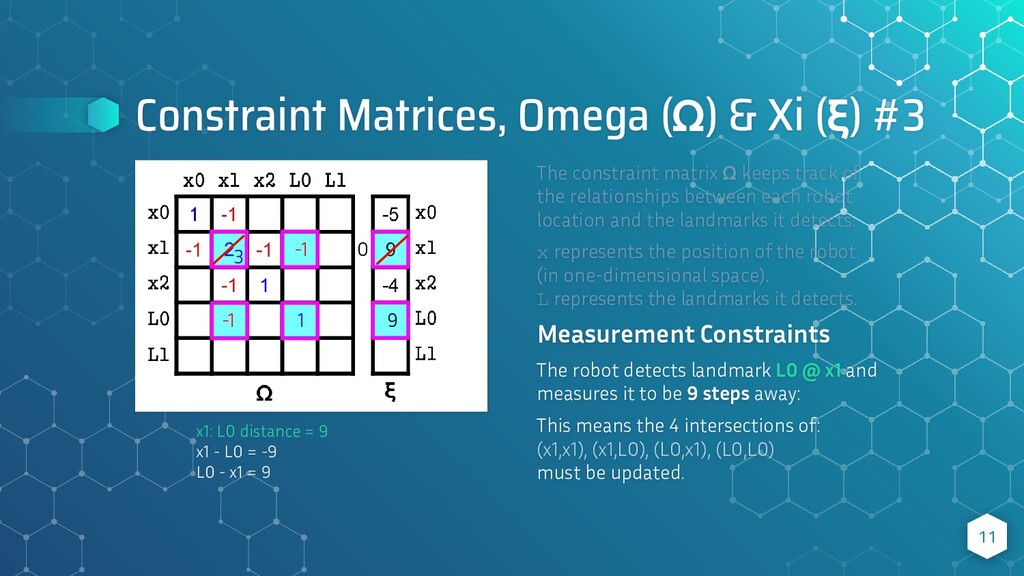
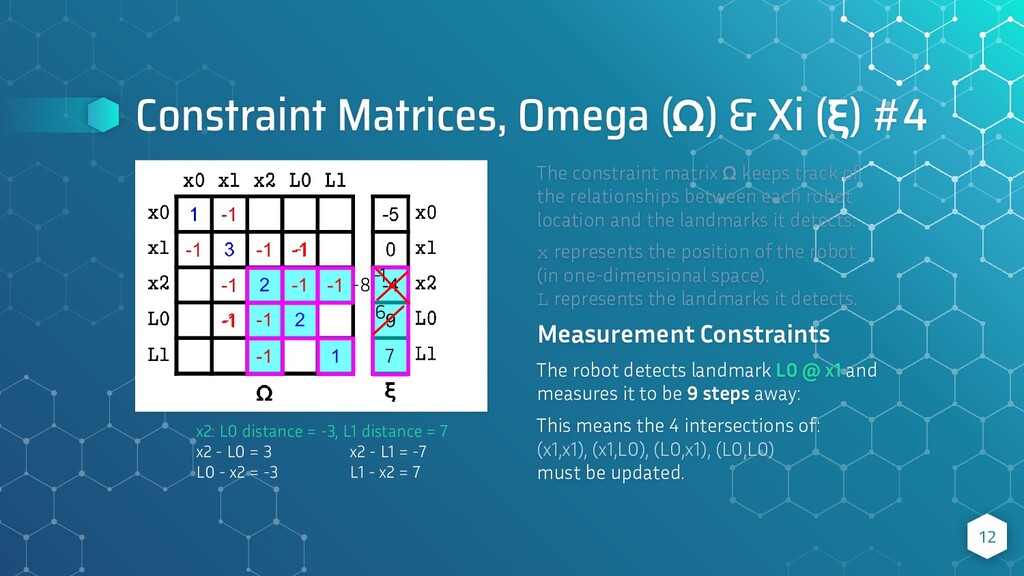
SLAM stands for Simultaneous Localization And Mapping. As a part of Udacity's Computer Vision Nanodegree, I generated a random world with randomly placed landmarks, and made a robot perform random movements within that world. Measurements between the robot location and nearby landmarks were performed at each step, and using the robot's motion, and measurements to the landmarks, its location was tracked over time.
This PPT was submitted as a part of my PhD coursework to detail my project process and reflection.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}