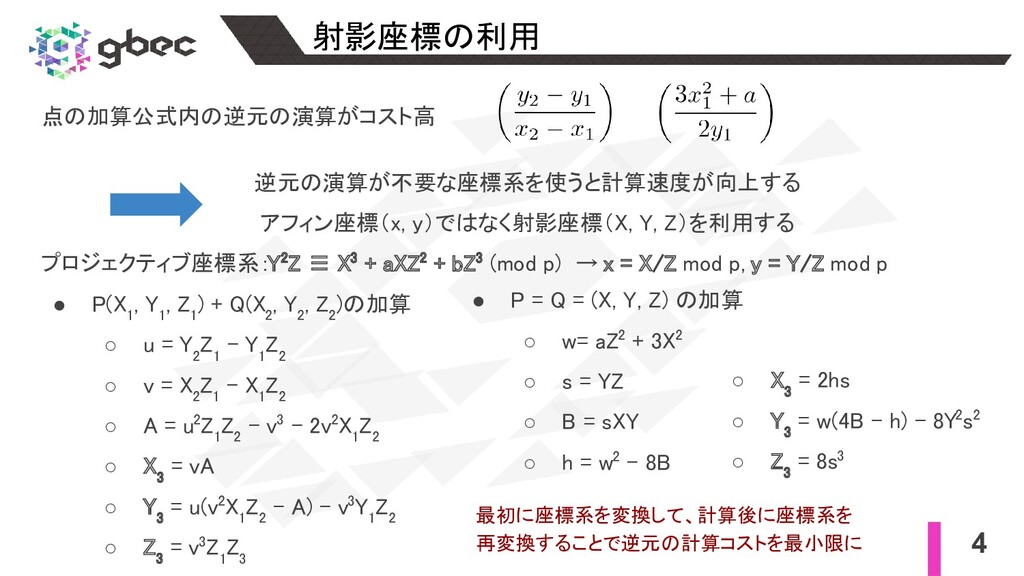
Z)を利用する プロジェクティブ座標系:Y2Z ≡ X3 + aXZ2 + bZ3 (mod p) → x = X/Z mod p, y = Y/Z mod p • P(X 1 , Y 1 , Z 1 ) + Q(X 2 , Y 2 , Z 2 )の加算 ◦ u = Y 2 Z 1 - Y 1 Z 2 ◦ v = X 2 Z 1 - X 1 Z 2 ◦ A = u2Z 1 Z 2 - v3 - 2v2X 1 Z 2 ◦ X 3 = vA ◦ Y 3 = u(v2X 1 Z 2 - A) - v3Y 1 Z 2 ◦ Z 3 = v3Z 1 Z 3 • P = Q = (X, Y, Z) の加算 ◦ w= aZ2 + 3X2 ◦ s = YZ ◦ B = sXY ◦ h = w2 - 8B ◦ X 3 = 2hs ◦ Y 3 = w(4B - h) - 8Y2s2 ◦ Z 3 = 8s3 最初に座標系を変換して、計算後に座標系を 再変換することで逆元の計算コストを最小限に
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}