the Kinect in Mobile Service Robotics. • Test through the application of Environment Segmentation. • Looking for planar surfaces within environments. • Operate within a real-time constraint of 30Hz.
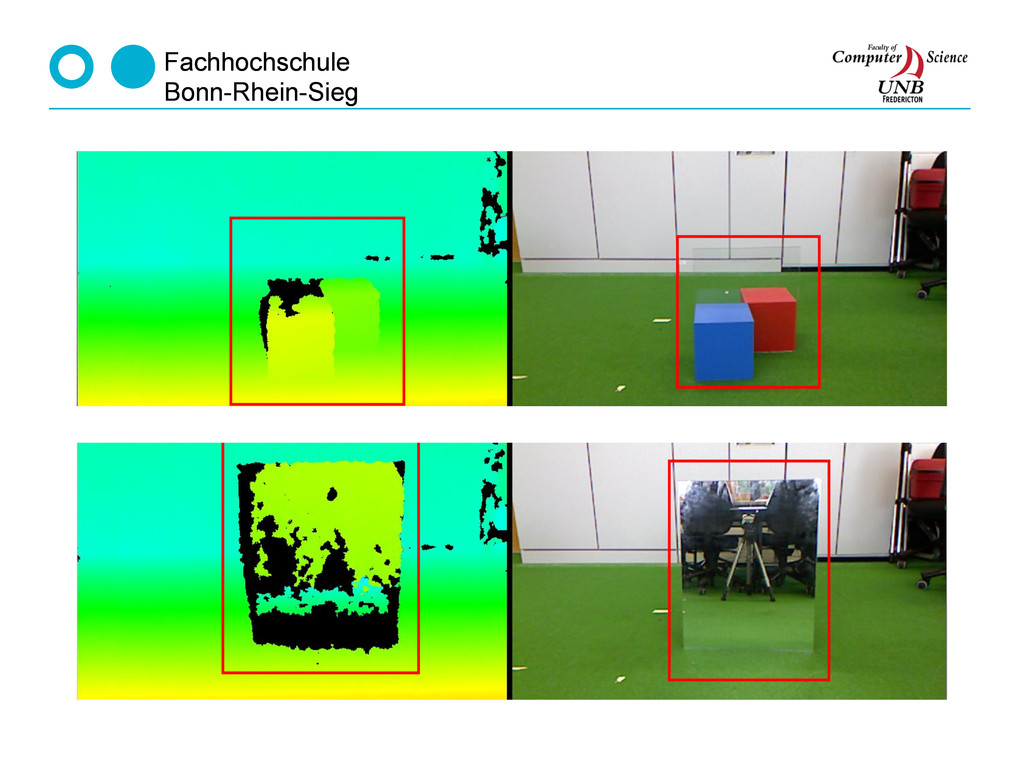
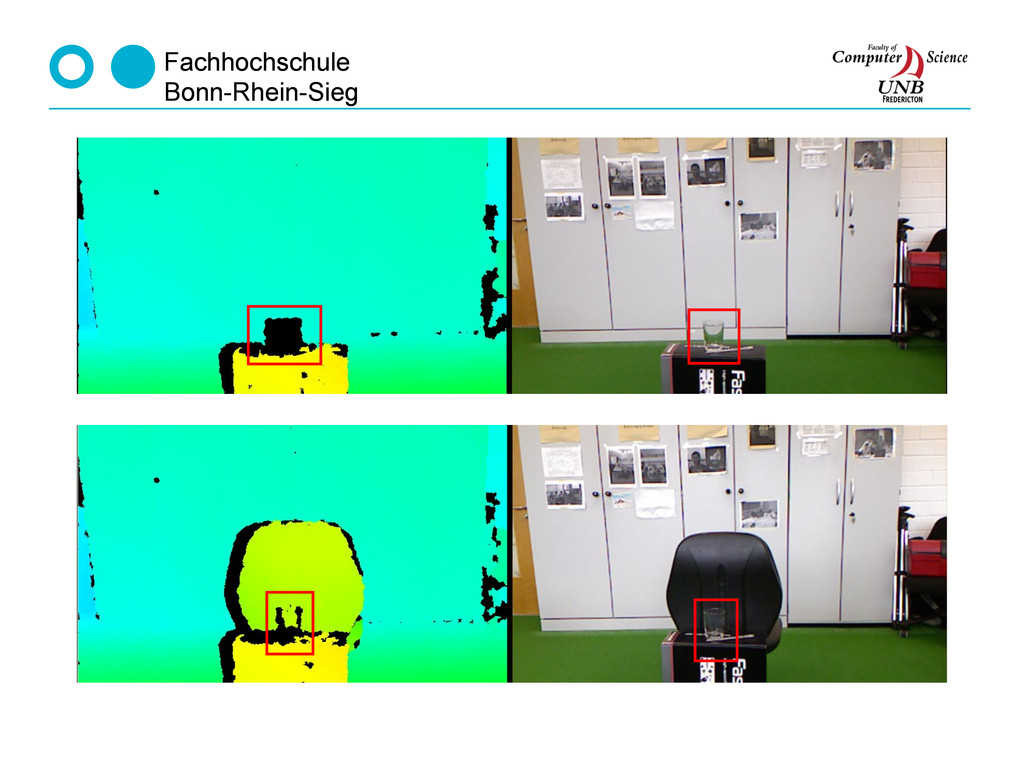
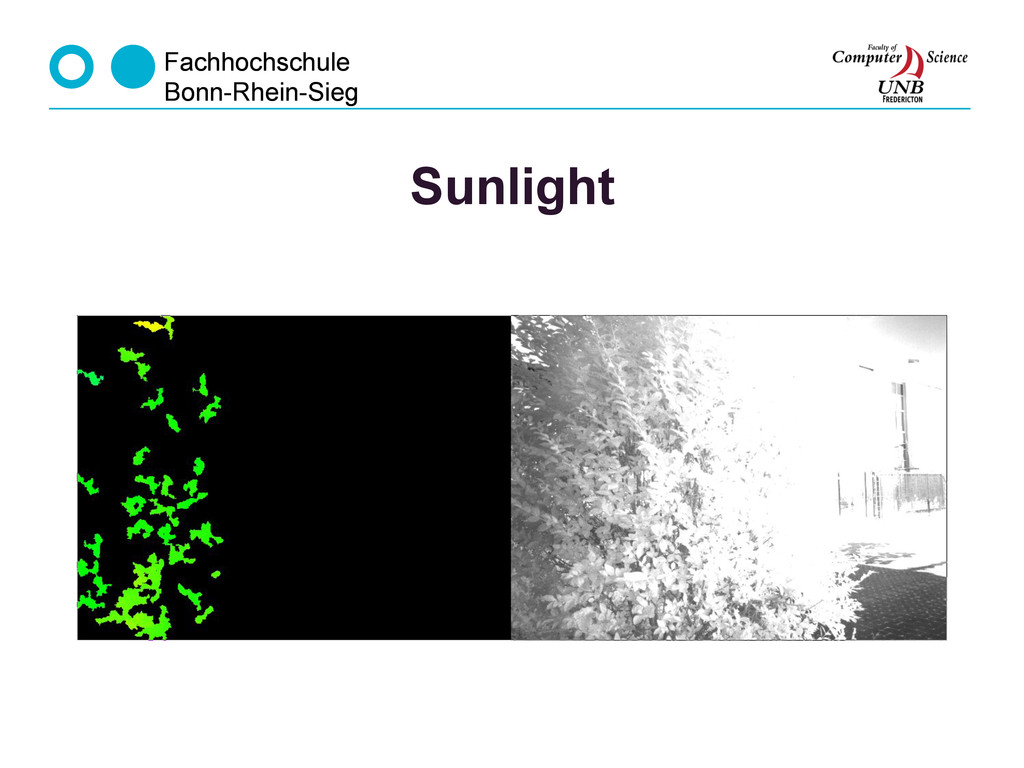
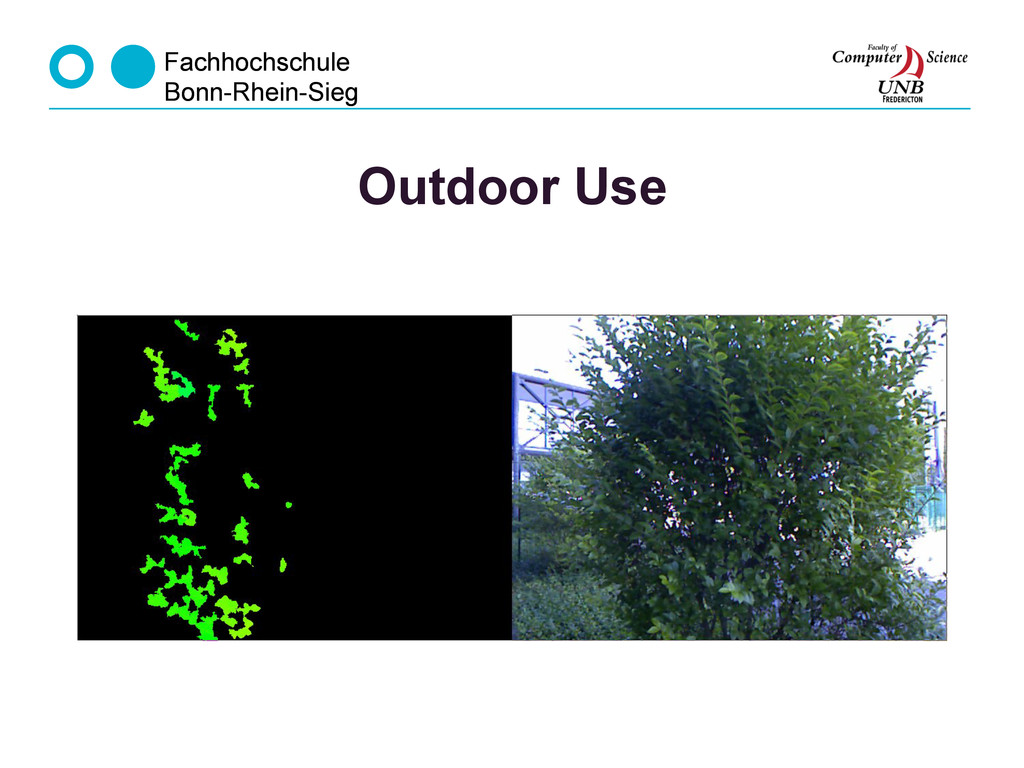
specific range. • If you are looking for long range values laser scanners are best. • Not advisable for path planning. • Not usable outdoors. • Multiple Kinects have interference issues. • Has issues dealing with varying types of materials.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}