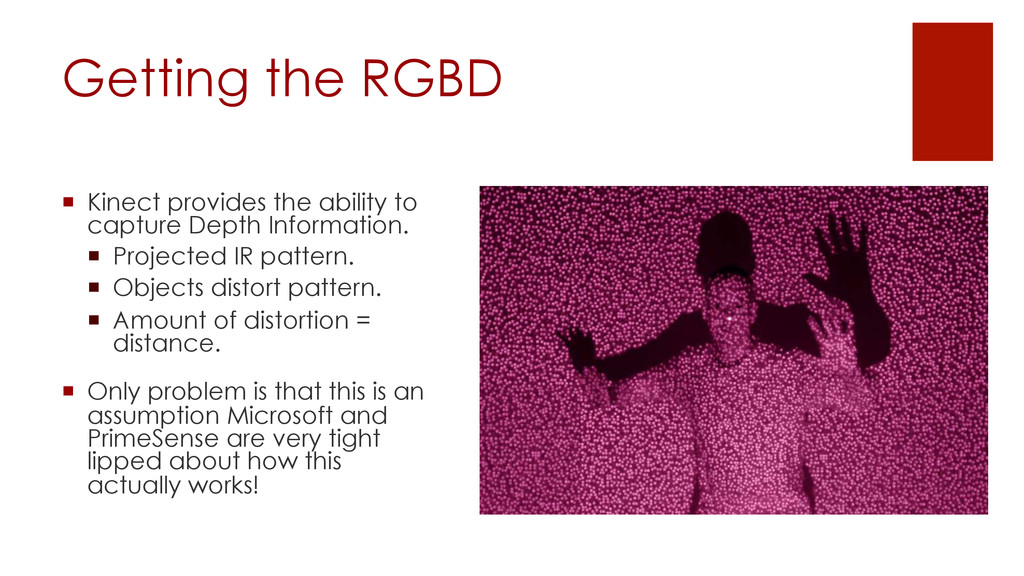
Depth Information. ¡ Projected IR pattern. ¡ Objects distort pattern. ¡ Amount of distortion = distance. ¡ Only problem is that this is an assumption Microsoft and PrimeSense are very tight lipped about how this actually works!
Development. ¡ Provides infrastructures for passing messages around between subsystems. ¡ Tends to become cluttered fast. ¡ Good for rapid prototyping and systems demonstrations.
Point Clouds. ¡ Uses any data captured by RGBD Cameras. ¡ Recently separated from ROS, (1.0 – Standalone PCL). ¡ C/C++/Python bindings. ¡ Recently started becoming GPU friendly.
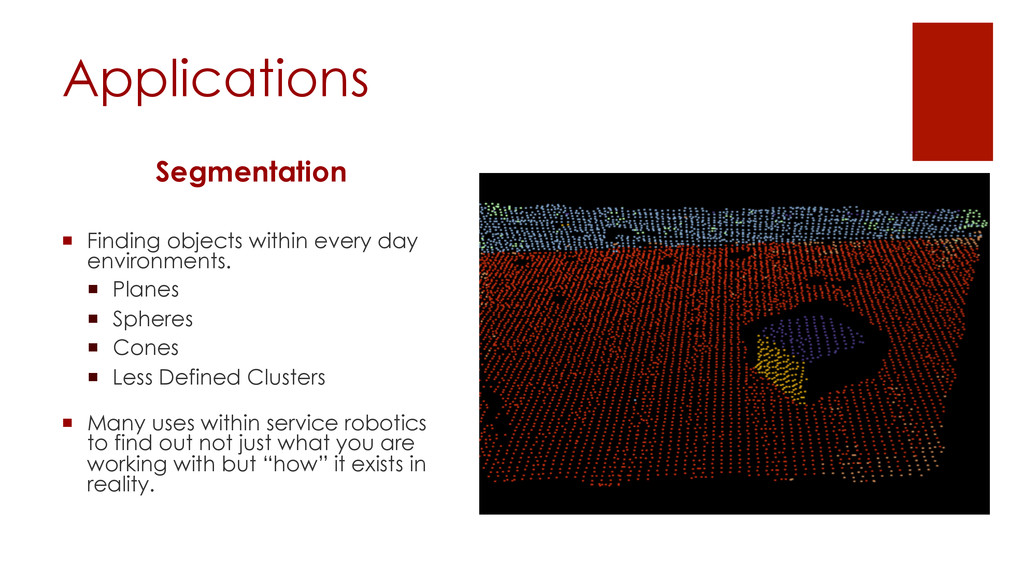
Planes ¡ Spheres ¡ Cones ¡ Less Defined Clusters ¡ Many uses within service robotics to find out not just what you are working with but “how” it exists in reality.
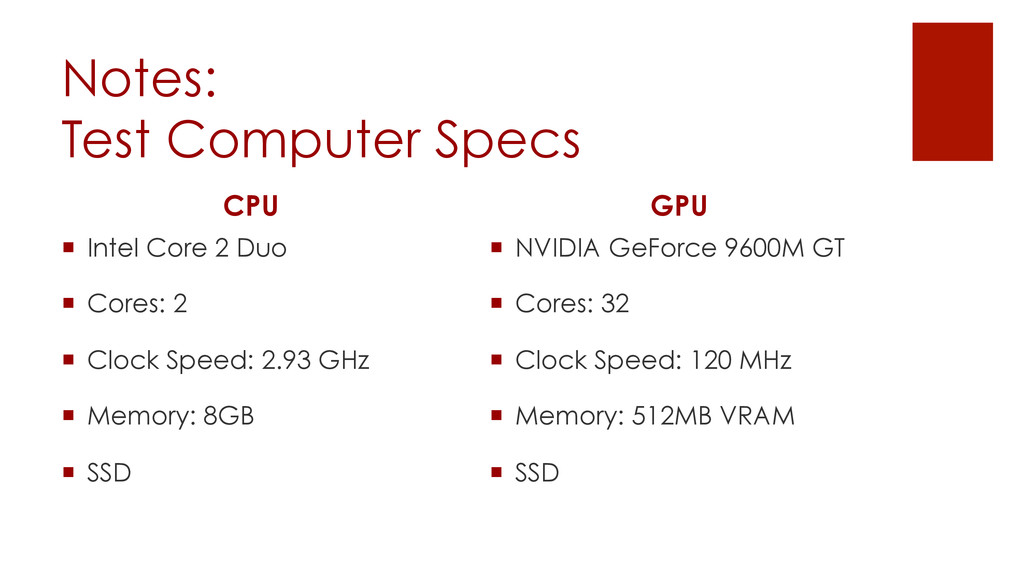
many more threads & processes at our demand! ¡ NVIDIA GeForce 9600M GT has 32 cores! ¡ High End Telsa has 470+ cores. ¡ Proven to be many times faster than CPU programs when running native (non optimized code). ¡ Intel was able to prove that GPU programs where only 5x faster than their CPU counterparts.
solve are easily parallelized. ¡ Spreading tasks across multiple cores in order to speed up processing. ¡ Cheaper than CPU’s and in most cases are faster than the CPU’s of equivalent price. ¡ Thrust now provides missing STL functionality on modern GPU’s.
a GPU than a CPU after CUDA 4.0 ¡ MOST CPU code compiles in NVCC ¡ No special language required simply pass c/ C++ code through NVCC. ¡ Biggest issue now: ¡ Thinking in terms of parallel processing!
of PCL (scheduled Fall 2011 release). ¡ Kinect Data Capture is now written in CUDA. ¡ Normal Estimation is now done in CUDA. ¡ Segmentation (RANSAC) will be parallelized by PCL 2.0! ¡ Why should we care? …
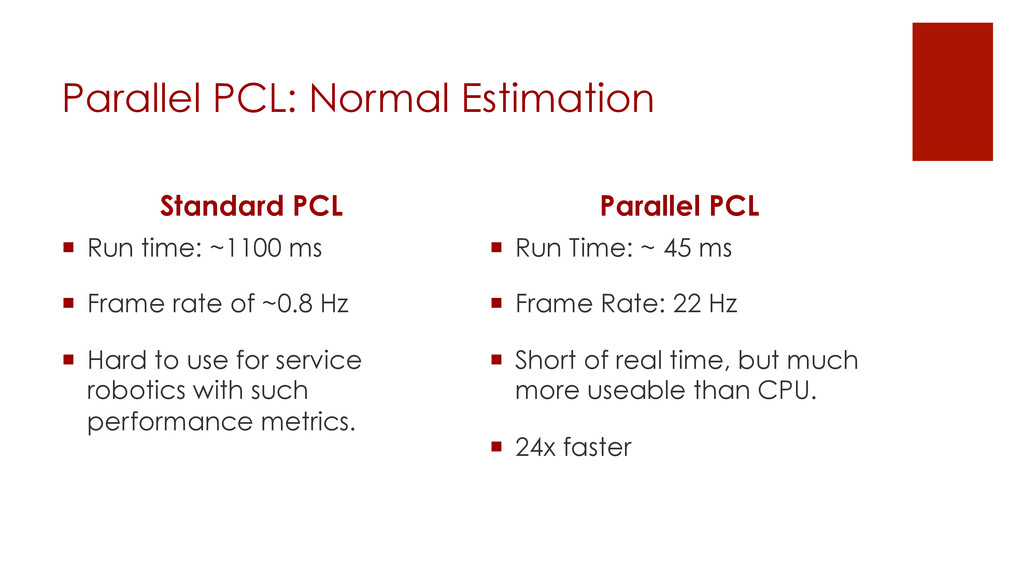
ms ¡ Frame rate of ~0.8 Hz ¡ Hard to use for service robotics with such performance metrics. Parallel PCL ¡ Run Time: ~ 45 ms ¡ Frame Rate: 22 Hz ¡ Short of real time, but much more useable than CPU. ¡ 24x faster
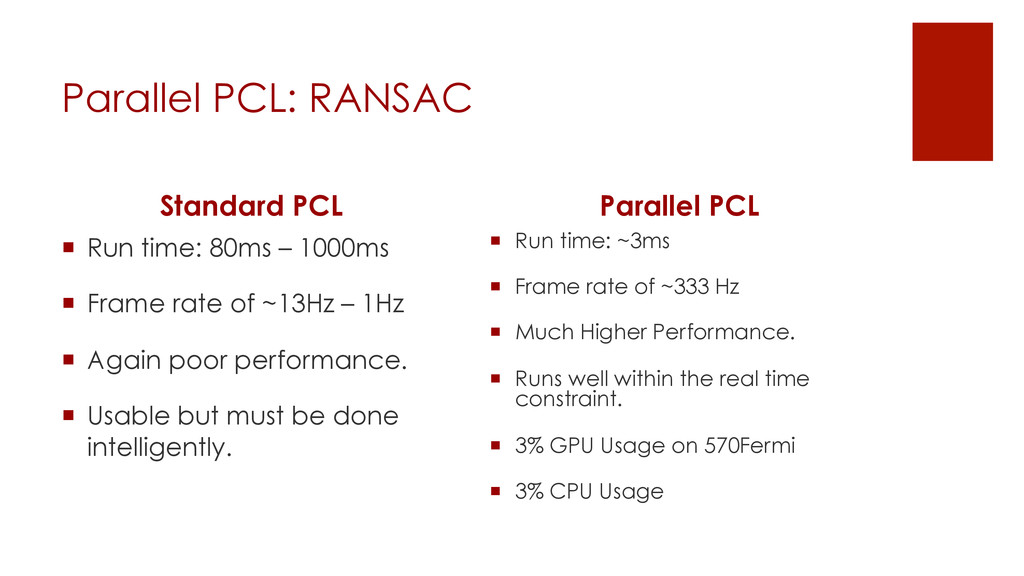
1000ms ¡ Frame rate of ~13Hz – 1Hz ¡ Again poor performance. ¡ Usable but must be done intelligently. Parallel PCL ¡ Run time: ~3ms ¡ Frame rate of ~333 Hz ¡ Much Higher Performance. ¡ Runs well within the real time constraint. ¡ 3% GPU Usage on 570Fermi ¡ 3% CPU Usage
Martin A Fishcler and Robert C Bolles, "Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography," Communications of the ACM, vol. 24, no. 6, pp. 381 - 395, 1981. ¡ http://www.pointclouds.org ¡ http://www.ros.org ¡ http://developer.nvidia.com/category/zone/cuda-zone ¡ http://nicolas.burrus.name/index.php/Research/ KinectRgbDemoV5
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}