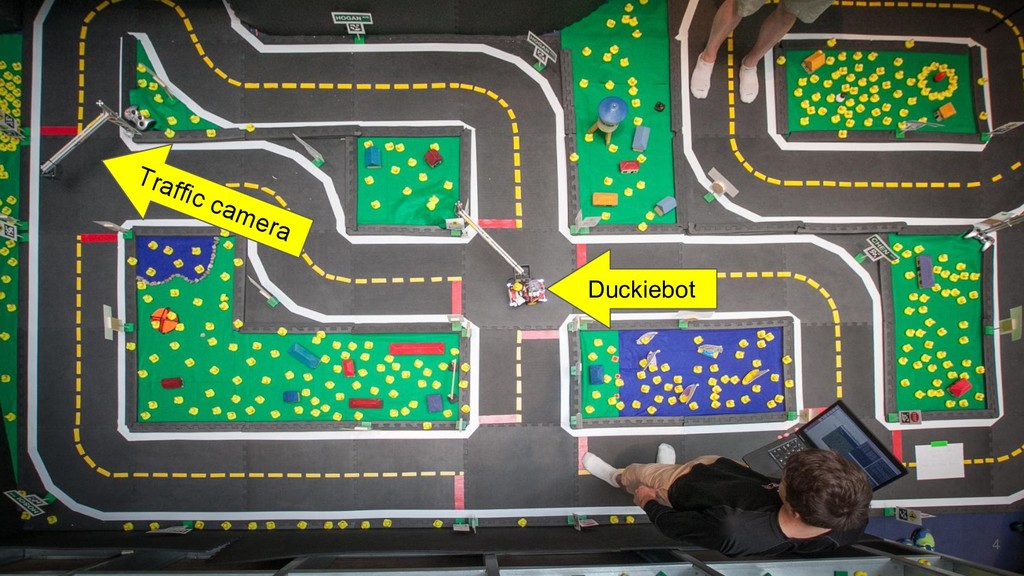
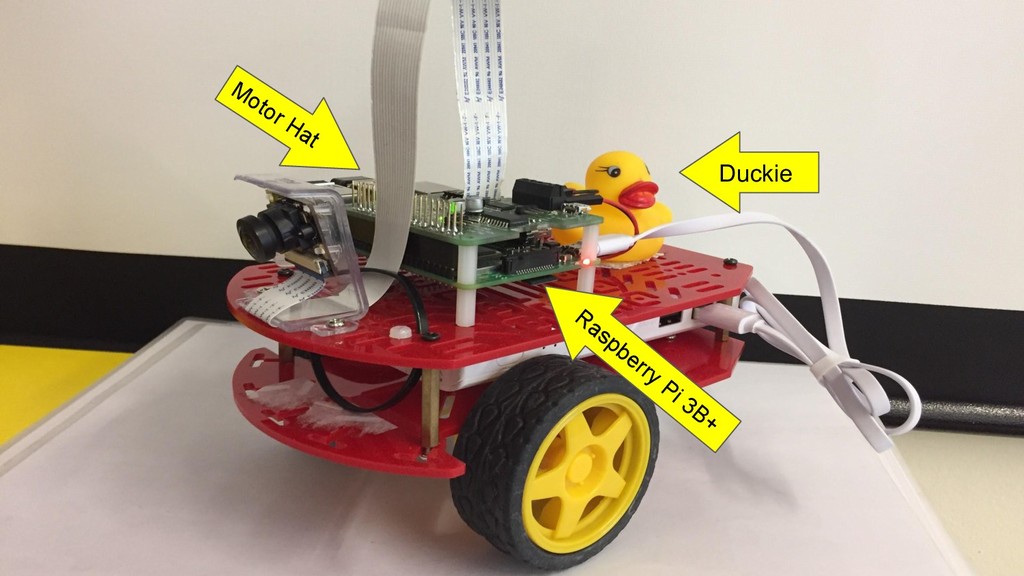
Duckietown is an international research and education platform for autonomous vehicles, incorporating a physical and a virtual town populated with miniature autonomous cars. In this tutorial, we’ll take a grand tour of Duckietown and explore how machine learning, simulators and container technology are transforming robotics development. Attendees will learn how to train a self-driving vehicle using the Duckietown Gym environment and a little help from ROS.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}