Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Unity-ROS連携を使ってみた話
Search
Sponsored
·
Your Podcast. Everywhere. Effortlessly.
Share. Educate. Inspire. Entertain. You do you. We'll handle the rest.
→
chikuta
May 05, 2021
Technology
1.1k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Unity-ROS連携を使ってみた話
chikuta
May 05, 2021
More Decks by chikuta
See All by chikuta
20200217_プリメイドAIをROS対応させたお話.pdf
chikuta
0
1.5k
Gazeboの怖い話
chikuta
0
1.3k
Other Decks in Technology
See All in Technology
“全部コピーしない”ファイルデータの活用 : — FSx for ONTAP × S3 Tables × Icebergで作るメタデータカタログ
yoshiki0705
0
210
Kotlin 開発のツラミを爆破した話! / Explode the difficulty of Kotlin dev!
eller86
0
130
AIペネトレーションテスト・ セキュリティ検証「AgenticSec」紹介資料
laysakura
2
7.9k
Microsoft のサポートとフィードバック総まとめ
murachiakira
PRO
0
130
スタートアップにおけるアジャイルの実践について #shibuyagile
murabayashi
3
1.8k
次世代ランサムウェア対策の考察 / 20260704 Mitsutoshi Matsuo
shift_evolve
PRO
5
1.6k
飲食店もAIで。レジ締めやハンディシステムをつくってる話 / Using AI for restaurant management
vtryo
0
220
感情と身体を置き去りにしない、エンジニアの生きのこり方 ──いまから、ここから「自分の状態」を扱うという選択
saorimurooka
0
440
GitHub Copilot運用のリアル ~AI Credit時代にどう向き合うか~
takafumisu2uk1
0
590
なぜ人は自分のプロジェクトを 「なんちゃってアジャイル」と 自嘲するのか
kozotaira
0
230
Foundry Toolkit + Lemonade Serverでローカルワークフロー開発
seosoft
0
120
プライバシー保護の理論と実践
lycorptech_jp
PRO
1
220
Featured
See All Featured
Tips & Tricks on How to Get Your First Job In Tech
honzajavorek
1
550
How Software Deployment tools have changed in the past 20 years
geshan
0
34k
VelocityConf: Rendering Performance Case Studies
addyosmani
333
25k
Game over? The fight for quality and originality in the time of robots
wayneb77
1
210
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2k
CoffeeScript is Beautiful & I Never Want to Write Plain JavaScript Again
sstephenson
162
16k
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.7k
GitHub's CSS Performance
jonrohan
1033
470k
Large-scale JavaScript Application Architecture
addyosmani
515
110k
Building the Perfect Custom Keyboard
takai
2
810
Product Roadmaps are Hard
iamctodd
PRO
55
12k
HDC tutorial
michielstock
2
730
Transcript
Unity - ROS 連携 を試してみた話 2021/05/05 ROS Japan UG #42
LT大会 @chikuta
Who ? • 経歴 高専ロボコン → ロボカップSSL (KIKS) → ロボカップ社会人チーム
(OP-AmP) → 団体の活動は現在休止中 • JTC ロボット系研究開発職 • ROS、RTM チョットデキル @chikuta Twitter / github
2020/11 某日
https://unity.com/ja/solutions/automotive-transportation-manufacturing/robotics
https://unity.com/ja/solutions/automotive-transportation-manufacturing/robotics 🤔 自由度が少ないのでは? 🤔 本当に使えるの? ロボティクス系エンジニアならヒューマノイドで試してみるしかないですよね!
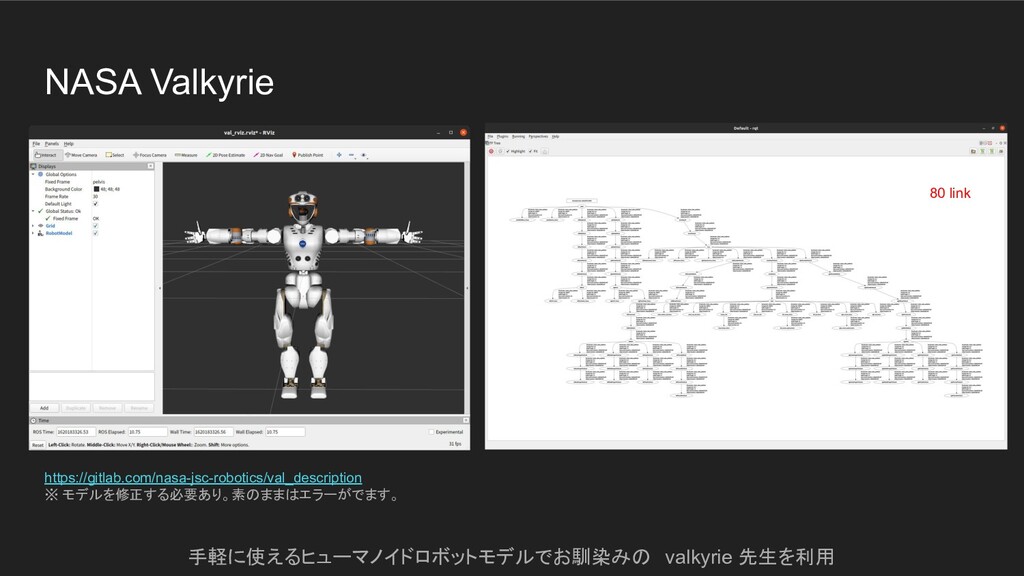
https://gitlab.com/nasa-jsc-robotics/val_description ※ モデルを修正する必要あり。素のままはエラーがでます。 80 link 手軽に使えるヒューマノイドロボットモデルでお馴染みの valkyrie 先生を利用 NASA Valkyrie
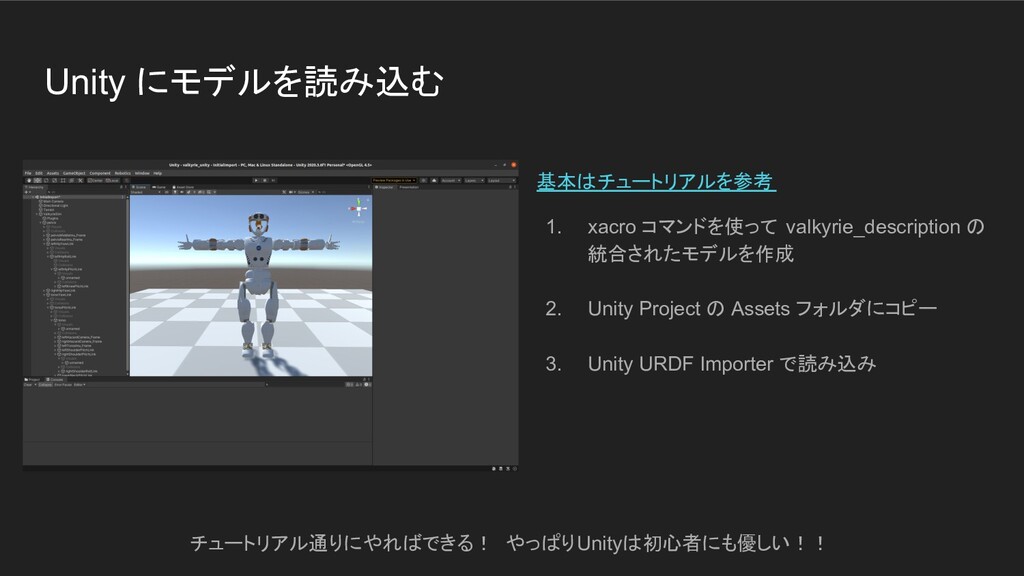
Unity にモデルを読み込む チュートリアル通りにやればできる! やっぱりUnityは初心者にも優しい!! 基本はチュートリアルを参考 1. xacro コマンドを使って valkyrie_description の
統合されたモデルを作成 2. Unity Project の Assets フォルダにコピー 3. Unity URDF Importer で読み込み
って思うじゃないですか?
実行してみな、飛ぶぞ。 Error Message: The maximum limit of ArticulationBody hierarchy size
is reached: hierarchy of articulations can't have more than 64 ArticulationBody nodes! 物理演算に使用されている ArticulationBody は64個以下の node tree しか対応していない
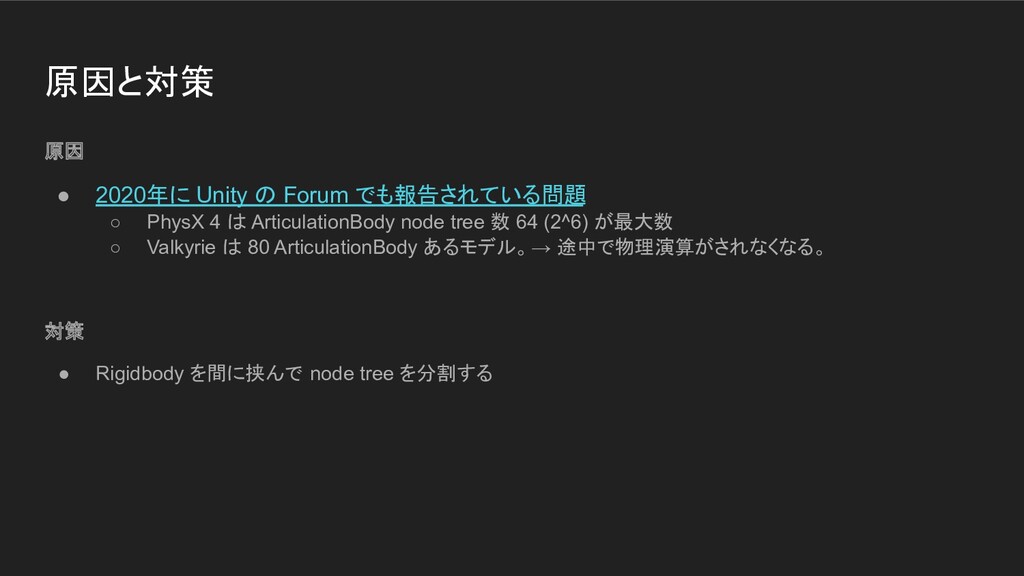
原因と対策 原因 • 2020年に Unity の Forum でも報告されている問題 ◦ PhysX
4 は ArticulationBody node tree 数 64 (2^6) が最大数 ◦ Valkyrie は 80 ArticulationBody あるモデル。→ 途中で物理演算がされなくなる。 対策 • Rigidbody を間に挟んで node tree を分割する
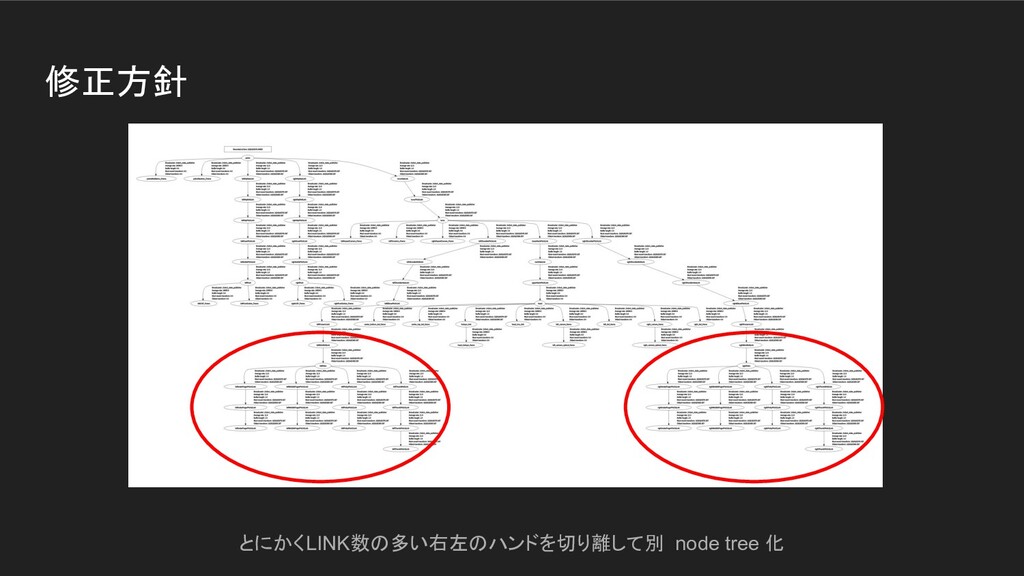
修正方針 とにかくLINK数の多い右左のハンドを切り離して別 node tree 化
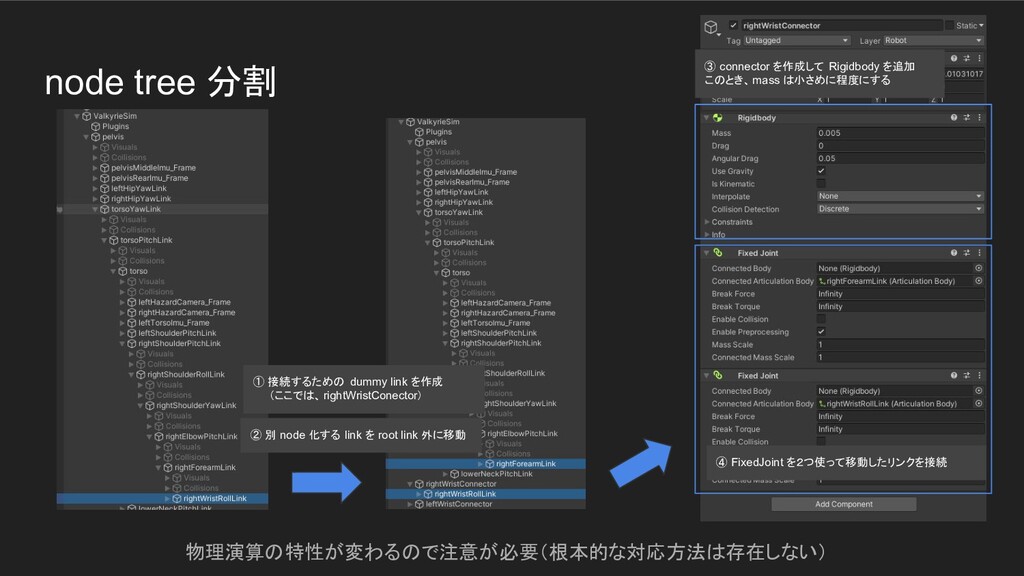
node tree 分割 物理演算の特性が変わるので注意が必要(根本的な対応方法は存在しない) ② 別 node 化する link を
root link 外に移動 ③ connector を作成して Rigidbody を追加 このとき、mass は小さめに程度にする ④ FixedJoint を2つ使って移動したリンクを接続 ① 接続するための dummy link を作成 (ここでは、rightWristConector)
物理演算の高精度化 Edit > Project Settings > Physics • Default Solver
Iterations 6 → 100 • Default Velocity Solver Iterations 1 → 50
修正結果
外部からの制御対応 • それっぽい位置制御用の UnityScriptを作成 • ROS-TCP-Connector と ROS-TCP-Endpoint を用いてROSとUnityを接続
所感 -ロボット開発でUnityを使う旨味- • 多リンク(64 ArticulationBody以上)のロボットを使用する場合、モデル更新毎に UnityProjectを修正しな いといけないため、メンテナンスコストが非常に高い • ROS-Unity接続を提供するUtility(ROS-TCP-Connector &
ROS-TCP-Endpoint)の 破壊的変更が定期的に発生するため、アップデートには注意が必要 • 物理演算に特化するなら Bullet / MuJoCo、ROSとの結合に特化するなら gazebo / Ignition という競合 があるので使いどころが非常に難しい。外界認識センサを使うシミュレーション用途かソフトウェアの結合 試験用途が最適?
発表したサンプル置き場 READMEが整備されていません。整備しますので少々お待ちください。 • Unity Project (valkyrie_unity) ◦ https://github.com/chikuta/valkyrie_unity • ROS-Unity-Connector
(val_ros_unity_demo) ◦ https://github.com/chikuta/val_ros_unity_demo • unity docker 連携 ◦ https://github.com/chikuta/chikuta-dockerfile ◦
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}