Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
20200217_プリメイドAIをROS対応させたお話.pdf
Search
chikuta
February 17, 2020
Research
1.5k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
20200217_プリメイドAIをROS対応させたお話.pdf
chikuta
February 17, 2020
More Decks by chikuta
See All by chikuta
Unity-ROS連携を使ってみた話
chikuta
0
1.1k
Gazeboの怖い話
chikuta
0
1.3k
Other Decks in Research
See All in Research
CyberAgent AI Lab研修 / Social Implementation Anti-Patterns in AI Lab
chck
7
4.7k
衛星×エッジAI勉強会 衛星上におけるAI処理制約とそ取組について
satai
4
580
多様なデータを許容し学習し続ける模倣学習 / Advanced Imitation Learning for VLA
prinlab
0
240
ScoreMatchingRiesz for Automatic Debiased Machine Learning and Policy Path Estimation with an Application to Japanese Monetary Policy Evaluation
masakat0
0
300
LINEヤフー データサイエンス Meetup「三井物産コモディティ予測チャレンジ」の舞台裏-AlpacaTechパート
gamella
1
590
東京大学工学部計数工学科、計数工学特別講義の説明資料
kikuzo
0
540
IA for theory
gpeyre
0
220
[BlackHatAsia2026] Hidden Telemetry: Uncovering TraceLogging ETW Providers You're Not Using (Yet)
asuna_jp
1
560
はじまりの クエスチョンブック —余暇と豊かさにあふれた社会とは?
culturaltransition
PRO
0
540
シングルチャネルマルチトーカー音声認識の進展
ryomasumura
0
170
セマンティック通信勉強会 6Gに向けたデバイス間効率的な通信の技術紹介・課題・今後展望
satai
3
190
typst の使い方:言語学を研究する学生のために
gitomochang
0
480
Featured
See All Featured
How GitHub (no longer) Works
holman
316
150k
Navigating Algorithm Shifts & AI Overviews - #SMXNext
aleyda
1
1.3k
Side Projects
sachag
455
43k
Fashionably flexible responsive web design (full day workshop)
malarkey
408
66k
The Cost Of JavaScript in 2023
addyosmani
55
10k
HU Berlin: Industrial-Strength Natural Language Processing with spaCy and Prodigy
inesmontani
PRO
0
430
[RailsConf 2023 Opening Keynote] The Magic of Rails
eileencodes
31
10k
[RailsConf 2023] Rails as a piece of cake
palkan
59
6.7k
Effective software design: The role of men in debugging patriarchy in IT @ Voxxed Days AMS
baasie
0
440
Amusing Abliteration
ianozsvald
1
220
jQuery: Nuts, Bolts and Bling
dougneiner
66
8.5k
Why You Should Never Use an ORM
jnunemaker
PRO
61
9.9k
Transcript
プリメイドAIをROS対応させた話 2020/02/17 ROS Japan UG #34 LT大会 @chikuta
Who ? • 高専ロボコン → ロボカップSSL → ロボカップSSL社会人チーム • 自動車メーカ
ロボット系研究開発職 • ROS、RTM チョットデキル @chikuta Twitter / Github
二足歩行ロボットは好きですか?
小型の二足歩行ロボット • 夢がある • サーボがたくさんついたメカって楽しい • 技術的なチャレンジがたくさんある • サーボへの課金額が機体性能を決める -
某黒塗りの高級サーボは1-3万円程度 • 市販品でROS対応しているものは少なく、あっても高い - Softbank robotics の nao が 140万程度 • 研究でやるなら良いけど、仕事にするのはちょっと…
プリメイドAI • 2019年の安売りで2万円。圧倒的なコスパ。 • Twitter上での解析が進んだことによって - Bluetooth経由で動かすコマンドが発見される - Unityモデルが公開される 1
nao 70 プリメイドAI =
ROS対応芸人
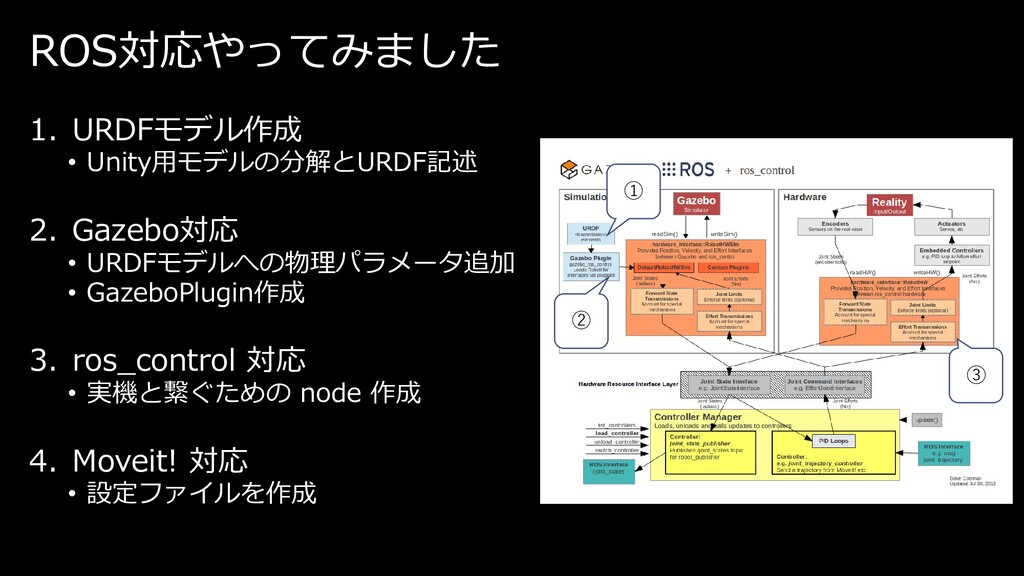
ROS対応やってみました 1. URDFモデル作成 • Unity用モデルの分解とURDF記述 2. Gazebo対応 • URDFモデルへの物理パラメータ追加 •
GazeboPlugin作成 3. ros_control 対応 • 実機と繋ぐための node 作成 4. Moveit! 対応 • 設定ファイルを作成 ① ② ③
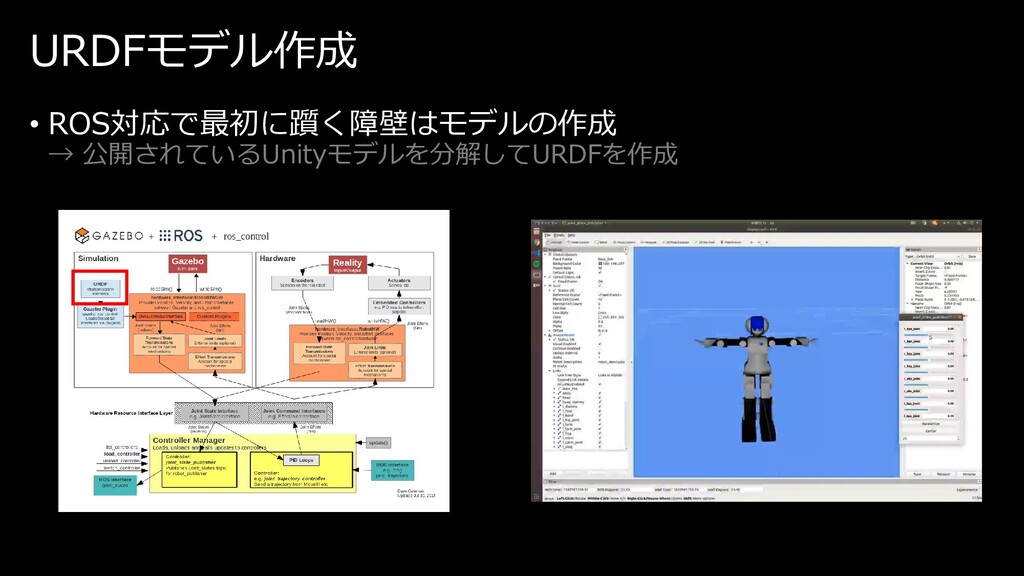
URDFモデル作成 • ROS対応で最初に躓く障壁はモデルの作成 → 公開されているUnityモデルを分解してURDFを作成
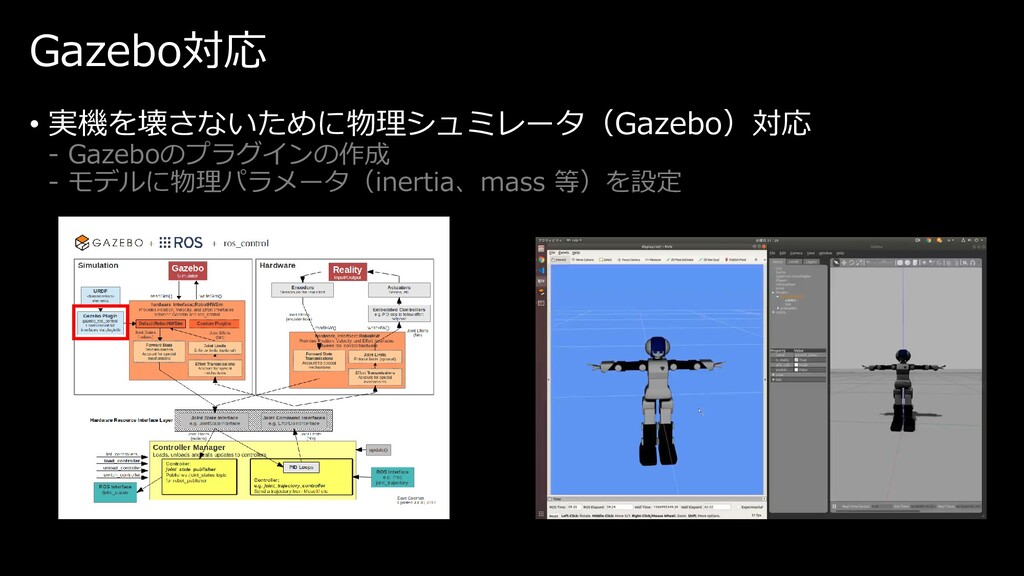
Gazebo対応 • 実機を壊さないために物理シュミレータ(Gazebo)対応 - Gazeboのプラグインの作成 - モデルに物理パラメータ(inertia、mass 等)を設定
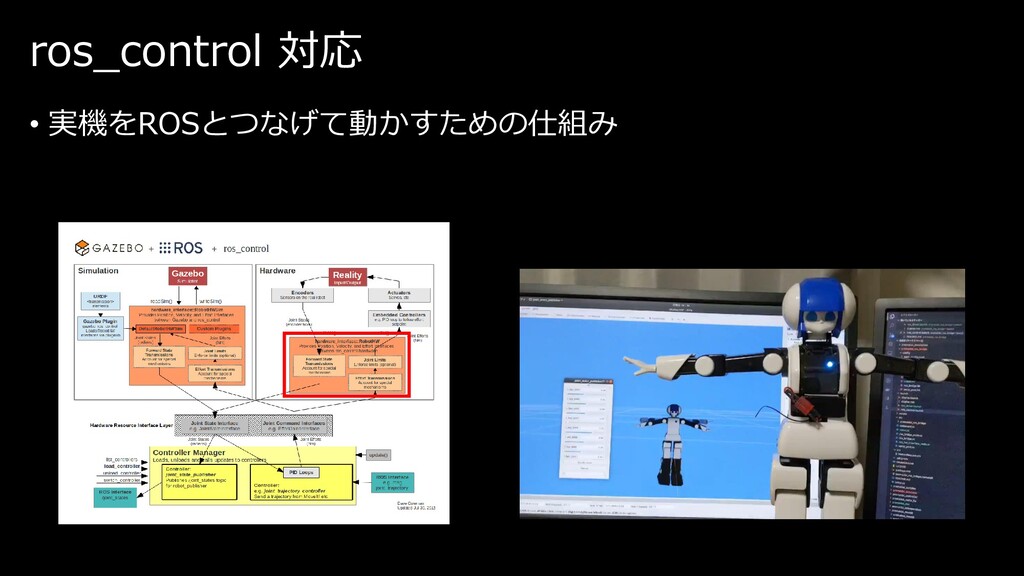
ros_control 対応 • 実機をROSとつなげて動かすための仕組み
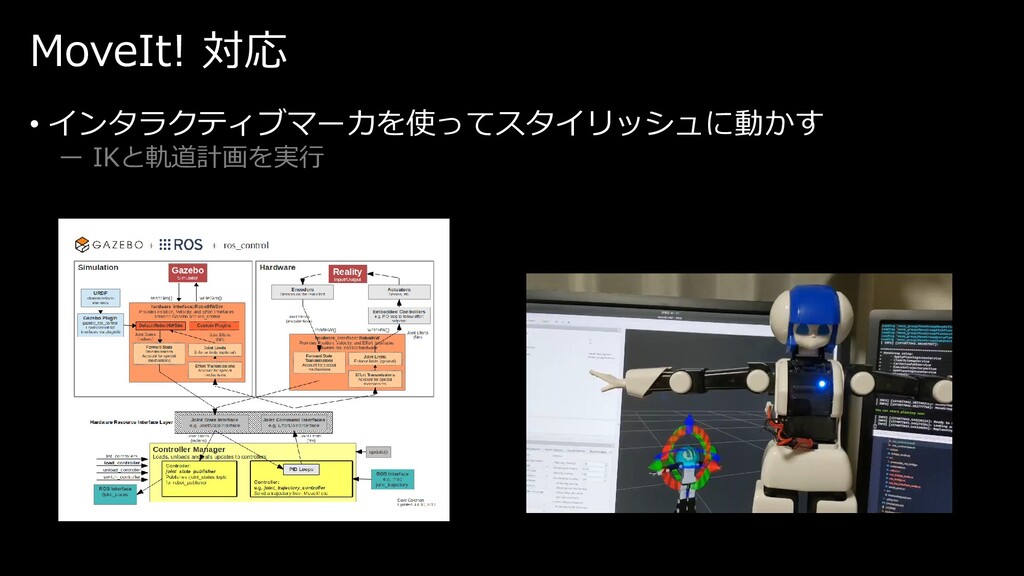
MoveIt! 対応 • インタラクティブマーカを使ってスタイリッシュに動かす ー IKと軌道計画を実行
まとめ 紹介したパッケージはすべて公開してあります。 • URDFモデル https://github.com/chikuta/premaidai_description • gazebo plugin https://github.com/chikuta/premaidai_simulator •
ros_control https://github.com/chikuta/premaidai_controller • MoveIt! https://github.com/chikuta/premaidai_moveit
やりきれなかったこと カスタムFWを公開しようとしたのですが間に合いませんでした
おしまい
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}