Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
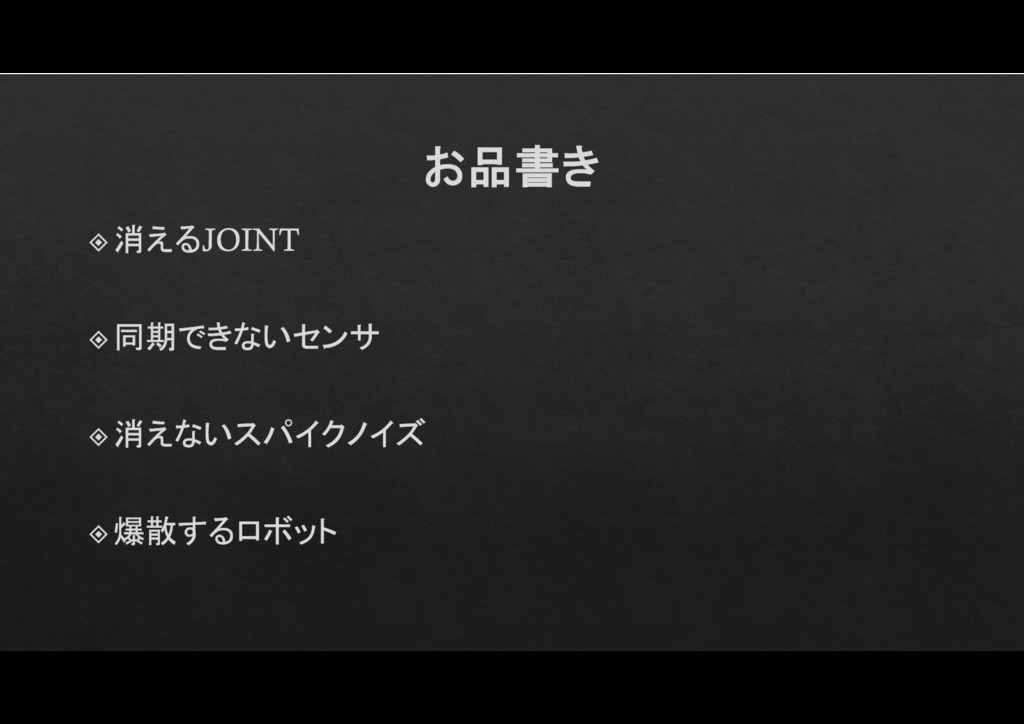
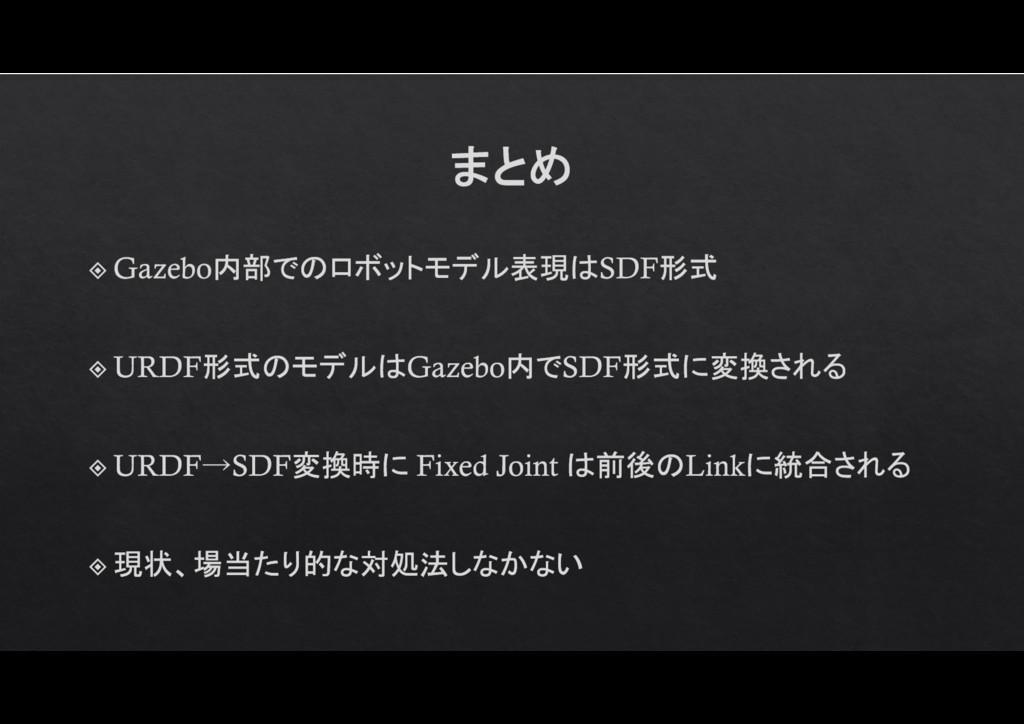
Gazeboの怖い話
Search
chikuta
July 19, 2017
Technology
1.3k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Gazeboの怖い話
chikuta
July 19, 2017
More Decks by chikuta
See All by chikuta
Unity-ROS連携を使ってみた話
chikuta
0
1.1k
20200217_プリメイドAIをROS対応させたお話.pdf
chikuta
0
1.5k
Other Decks in Technology
See All in Technology
クラウドファンディング版StackChan 3体(4体)をインタラクティブな体験型作品にして展示もした話 / スタックチャンお誕生日会2026
you
PRO
0
270
Hatena Engineer Seminar 37 jj1uzh
jj1uzh
0
400
スタートアップにおけるアジャイルの実践について #shibuyagile
murabayashi
3
1.8k
認証認可だけじゃない! ID管理の構成要素と ライフサイクルを意識しよう
ritou
1
430
AWS Blocks を触ってみた/first-tach-aws-blocks
fossamagna
2
110
AWS Summit 2026で見えたSIerにとっての Amazon Quickの位置づけ
maf_0521
0
150
“ID沼入口” - 基本とセキュリティから始める、考え続けるためのID管理技術勉強会 告知&イントロ
ritou
0
360
Tech-Verse 2026_Keynote
lycorptech_jp
PRO
0
110
どうして今サーバーサイドKotlinを選択したのか
nealle
0
180
AIペネトレーションテスト・ セキュリティ検証「AgenticSec」紹介資料
laysakura
2
7.9k
テスト設計の本質を改めて考えてみる~生成AIを活用する時代だからこそ、作ったテストの説明性を高めよう~
yamasaki696
1
260
“全部コピーしない”ファイルデータの活用 : — FSx for ONTAP × S3 Tables × Icebergで作るメタデータカタログ
yoshiki0705
0
220
Featured
See All Featured
Self-Hosted WebAssembly Runtime for Runtime-Neutral Checkpoint/Restore in Edge–Cloud Continuum
chikuwait
0
630
Information Architects: The Missing Link in Design Systems
soysaucechin
0
990
GitHub's CSS Performance
jonrohan
1033
470k
Reflections from 52 weeks, 52 projects
jeffersonlam
356
21k
Designing Powerful Visuals for Engaging Learning
tmiket
1
430
State of Search Keynote: SEO is Dead Long Live SEO
ryanjones
0
210
The B2B funnel & how to create a winning content strategy
katarinadahlin
PRO
1
410
GraphQLの誤解/rethinking-graphql
sonatard
75
12k
Design of three-dimensional binary manipulators for pick-and-place task avoiding obstacles (IECON2024)
konakalab
0
480
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
2
410
How to Grow Your eCommerce with AI & Automation
katarinadahlin
PRO
1
220
Rebuilding a faster, lazier Slack
samanthasiow
85
9.5k
Transcript
None
None
The Power Point of Dreams
None
None
None
None
The Power Point of Dreams
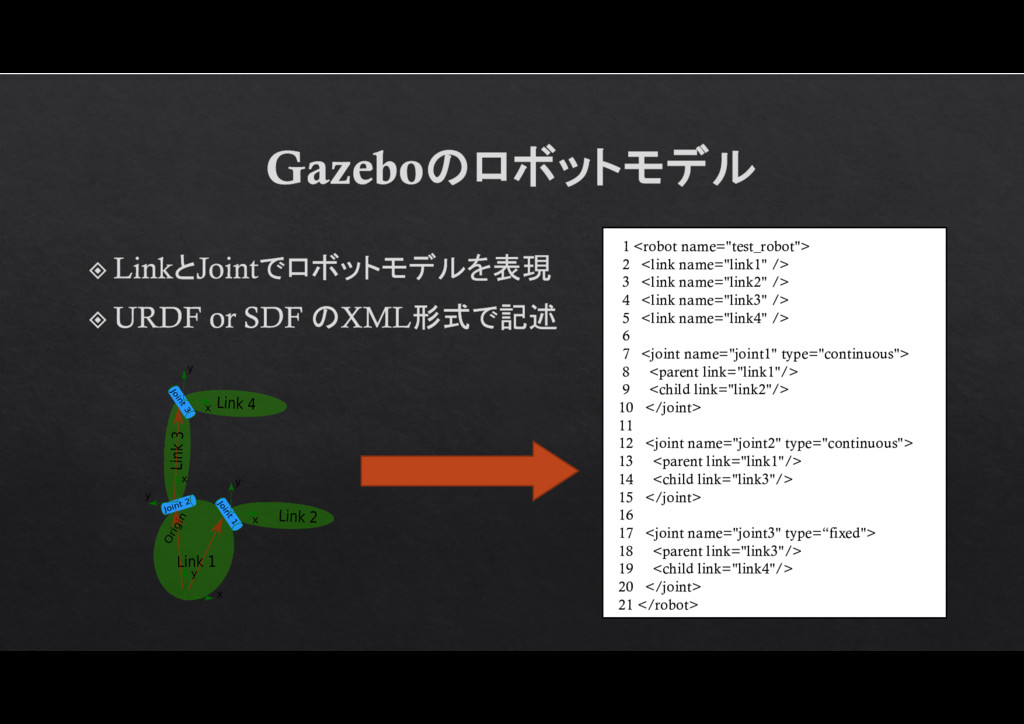
1 <robot name="test_robot"> 2 <link name="link1" /> 3 <link name="link2"
/> 4 <link name="link3" /> 5 <link name="link4" /> 6 7 <joint name="joint1" type="continuous"> 8 <parent link="link1"/> 9 <child link="link2"/> 10 </joint> 11 12 <joint name="joint2" type="continuous"> 13 <parent link="link1"/> 14 <child link="link3"/> 15 </joint> 16 17 <joint name="joint3" type=“fixed"> 18 <parent link="link3"/> 19 <child link="link4"/> 20 </joint> 21 </robot>
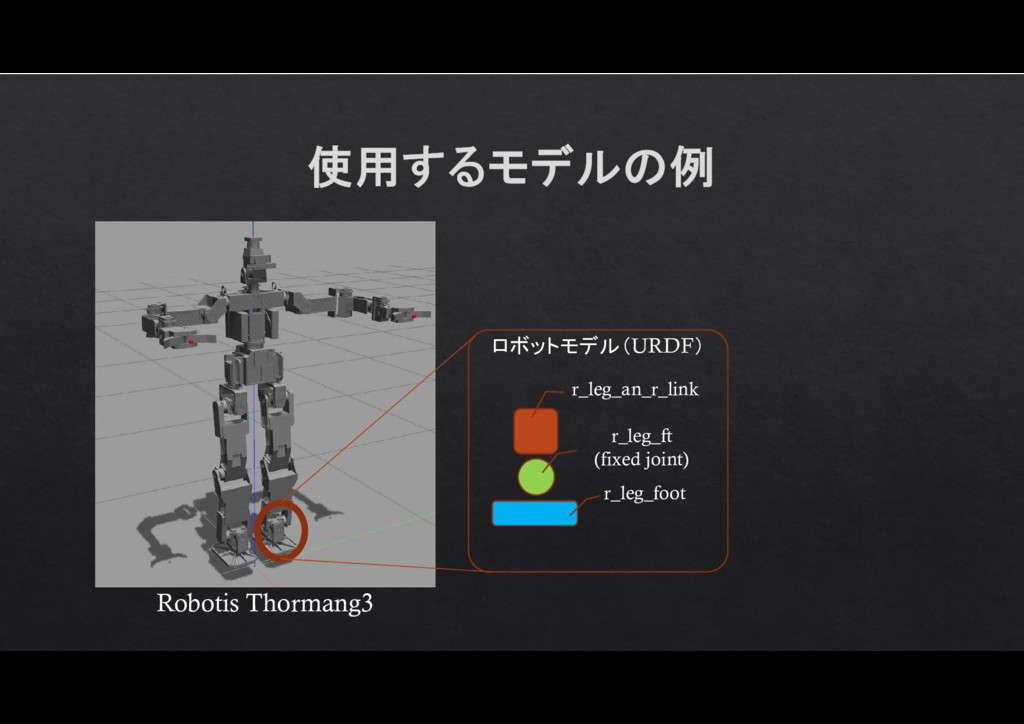
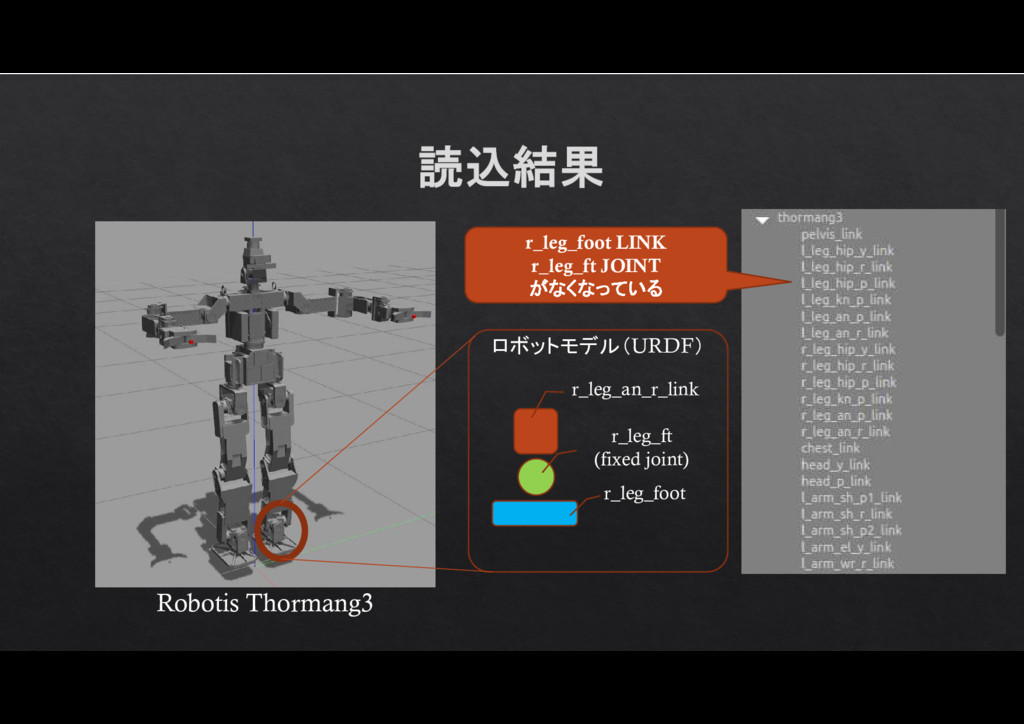
r_leg_an_r_link r_leg_ft (fixed joint) r_leg_foot ロボットモデル(URDF) Robotis Thormang3
r_leg_an_r_link r_leg_ft (fixed joint) r_leg_foot ロボットモデル(URDF) Robotis Thormang3
None
r_leg_an_r_link r_leg_ft (fixed joint) r_leg_foot ロボットモデル(URDF) Robotis Thormang3 r_leg_foot LINK
r_leg_ft JOINT がなくなっている
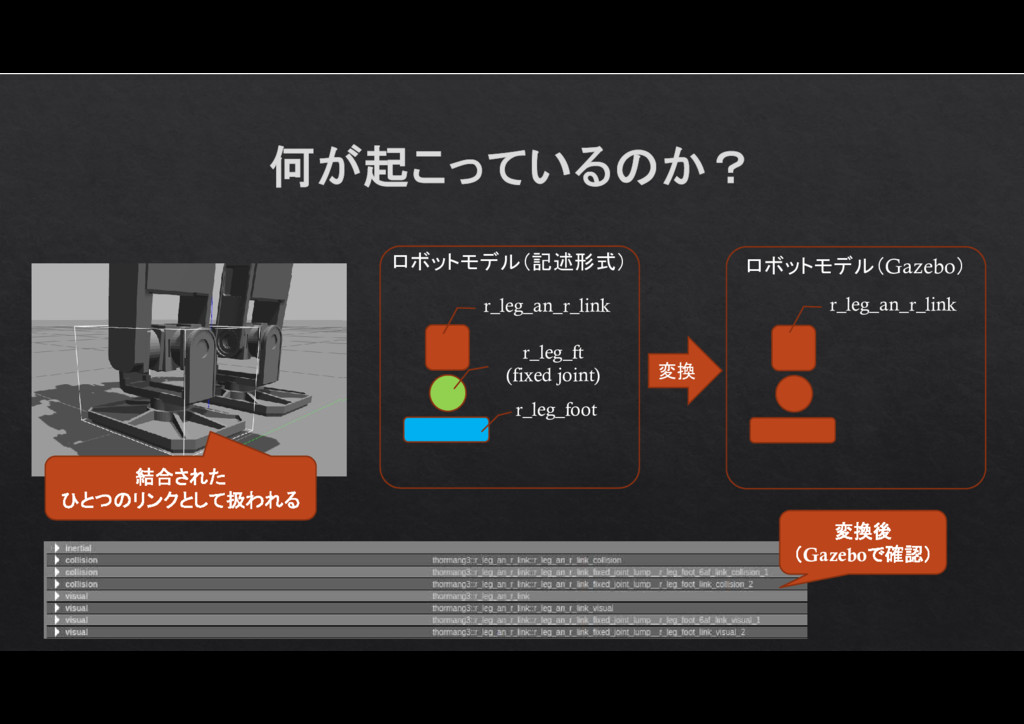
r_leg_an_r_link r_leg_ft (fixed joint) r_leg_foot 変換後 (Gazeboで確認) ロボットモデル(記述形式) 結合された ひとつのリンクとして扱われる
r_leg_an_r_link ロボットモデル(Gazebo) 変換
The Power Point of Dreams
None
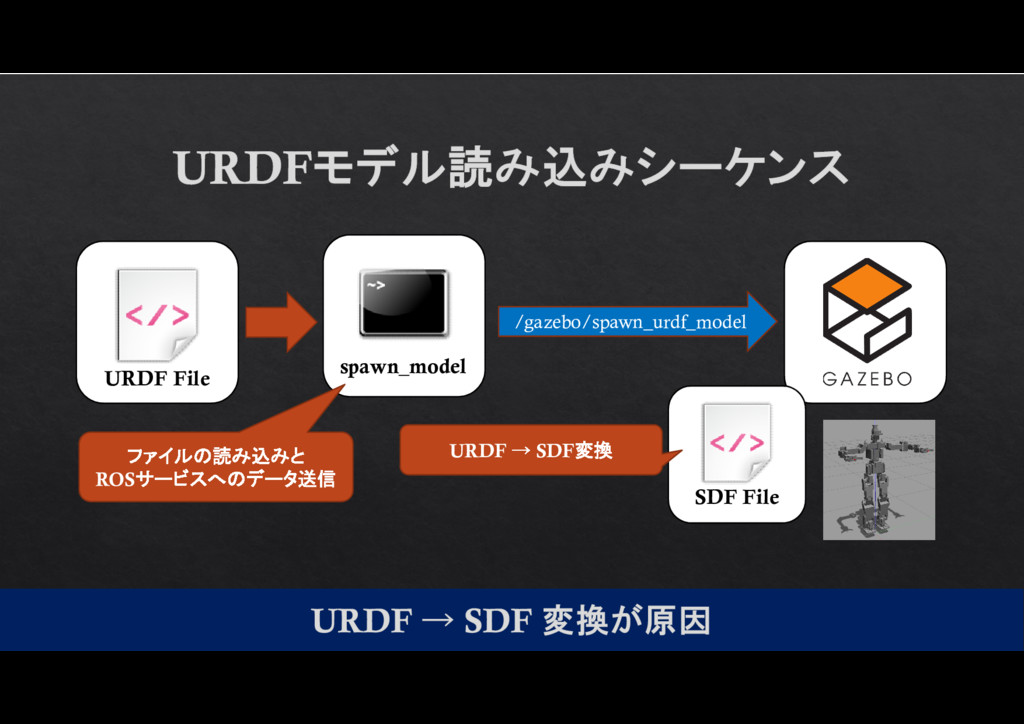
The Power Point of Dreams URDF File /gazebo/spawn_urdf_model SDF File
URDF → SDF変換 spawn_model ファイルの読み込みと ROSサービスへのデータ送信
None
None
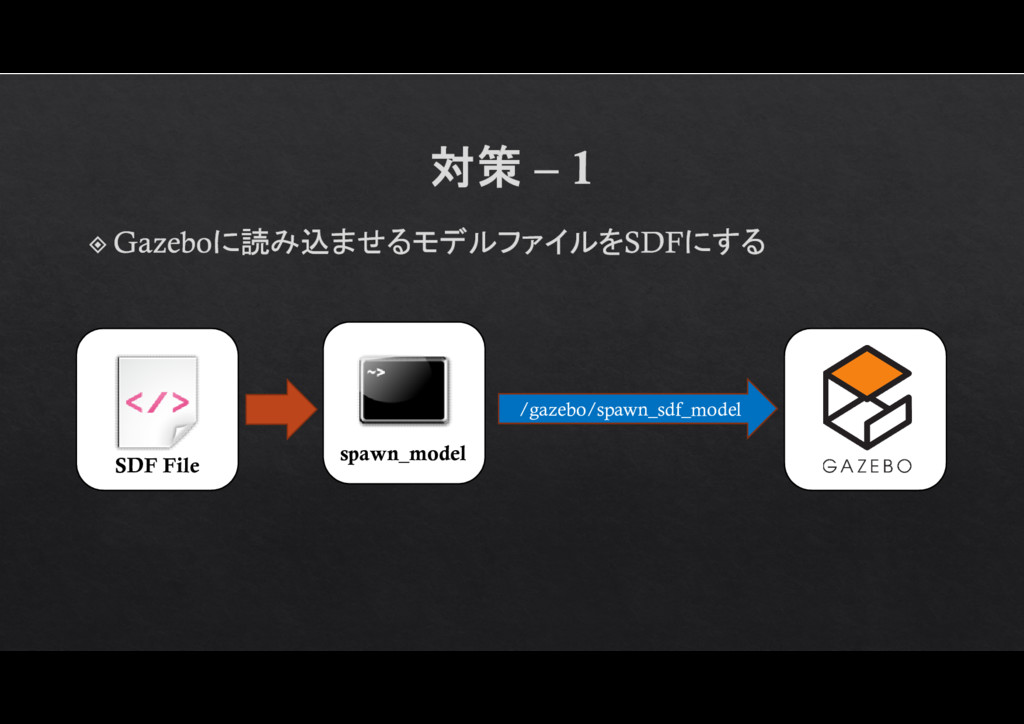
SDF File spawn_model /gazebo/spawn_sdf_model
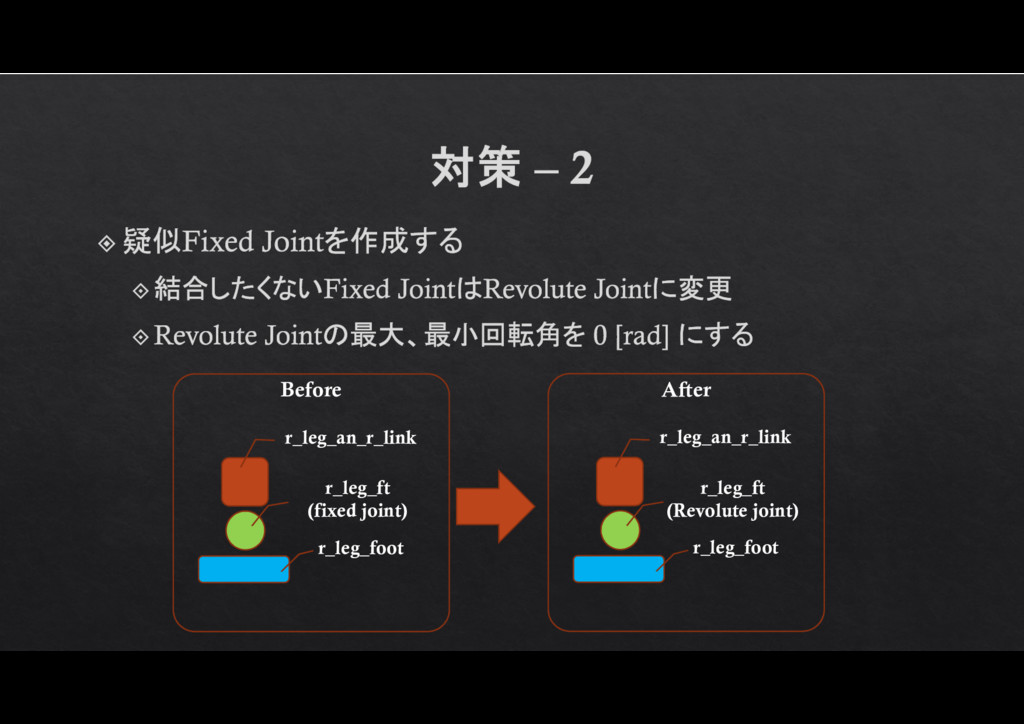
r_leg_an_r_link r_leg_ft (fixed joint) r_leg_foot Before r_leg_an_r_link r_leg_ft (Revolute joint)
r_leg_foot After
None
None
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}