motion actually works, evident from below: “What about the fact that when things are thrown they continue to move when the thrower is no longer touching them? It would be impossible to explain why something which has been set in motion should stop anywhere: why should it stop here rather than there?” • The conceptual difficulty — defining motion — remained up to and beyond Newton’s time. 2
motion, and shape of the heaven (celestial bodies) accurately: “Circular movement is the primary kind of movement. Only circular motion can be continuous and eternal.” “The shape of the heaven is of necessity spherical; for that is the shape most appropriate to its substance and also by nature primary.” 3
model — Ptolemy, the author of Almagest (200 AD) • Heliocentric model — Aristarchus of Samoa (300 AD) • The Church later supported the geocentric model, as it was popular, emphasized Earth’s privilege. 5
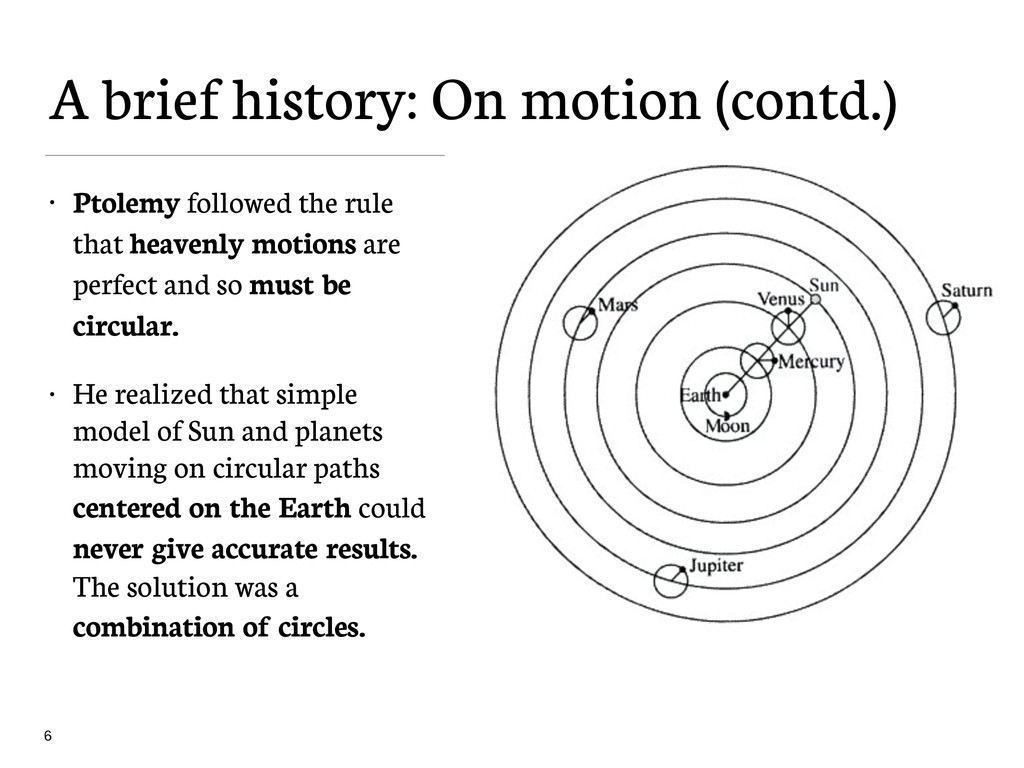
rule that heavenly motions are perfect and so must be circular. • He realized that simple model of Sun and planets moving on circular paths centered on the Earth could never give accurate results. The solution was a combination of circles. 6
was not understood. • 14 century brought Renaissance — Art led to geometry, mathematics, and eventually, physics. • Renaissance renewed the curiosity about everything, including “heavenly” bodies. • However, discussing heavenly bodies (i.e., planets) was a religious matter. 7
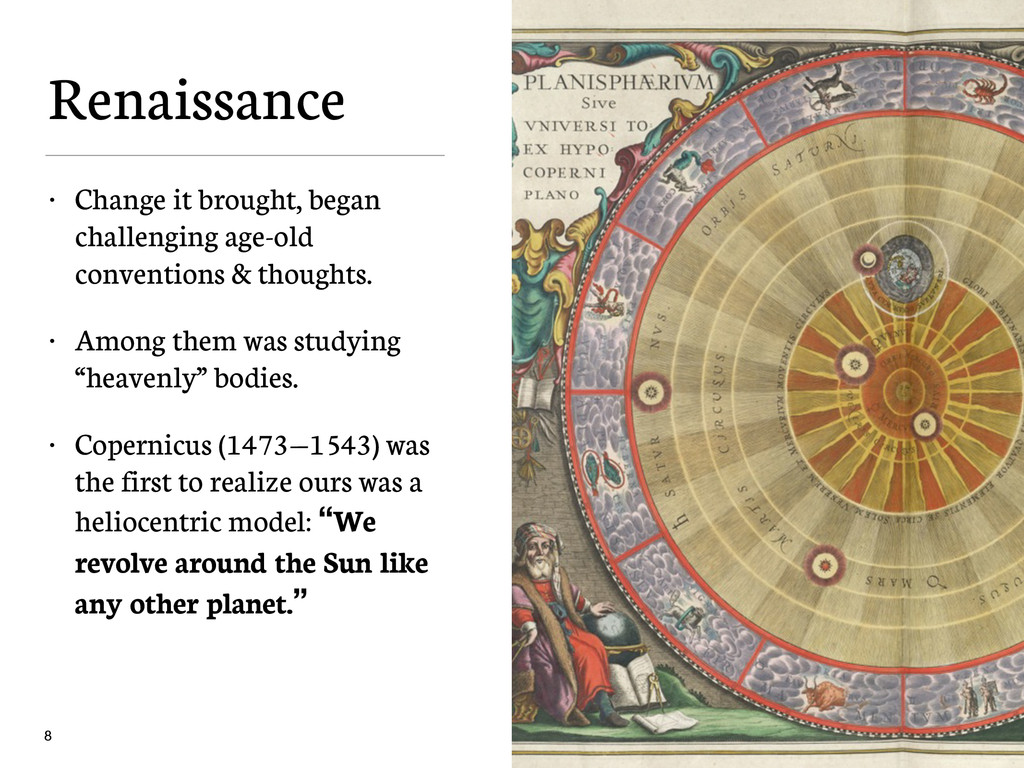
thoughts. • Among them was studying “heavenly” bodies. • Copernicus (1473—1543) was the first to realize ours was a heliocentric model: “We revolve around the Sun like any other planet.” 8
none may have exerted a greater effect on the human spirit than the doctrine of Copernicus. The world has scarcely become known as round and complete in itself when it was asked to waive the tremendous privilege of being the center of the universe.” 9
the rest is history, as they say. • His discoveries overturned 1400 years of scientific wisdom. • He was not alone: Tycho Brahe made similar breakthroughs. Kepler exchanged notes with Galileo. • Based on his observations, Galileo first defined Inertia, as we know today. 10
not disturbed, it continues to move with a constant velocity in a straight line if it was originally moving, or it continues to stand still if it was just standing still.” 11
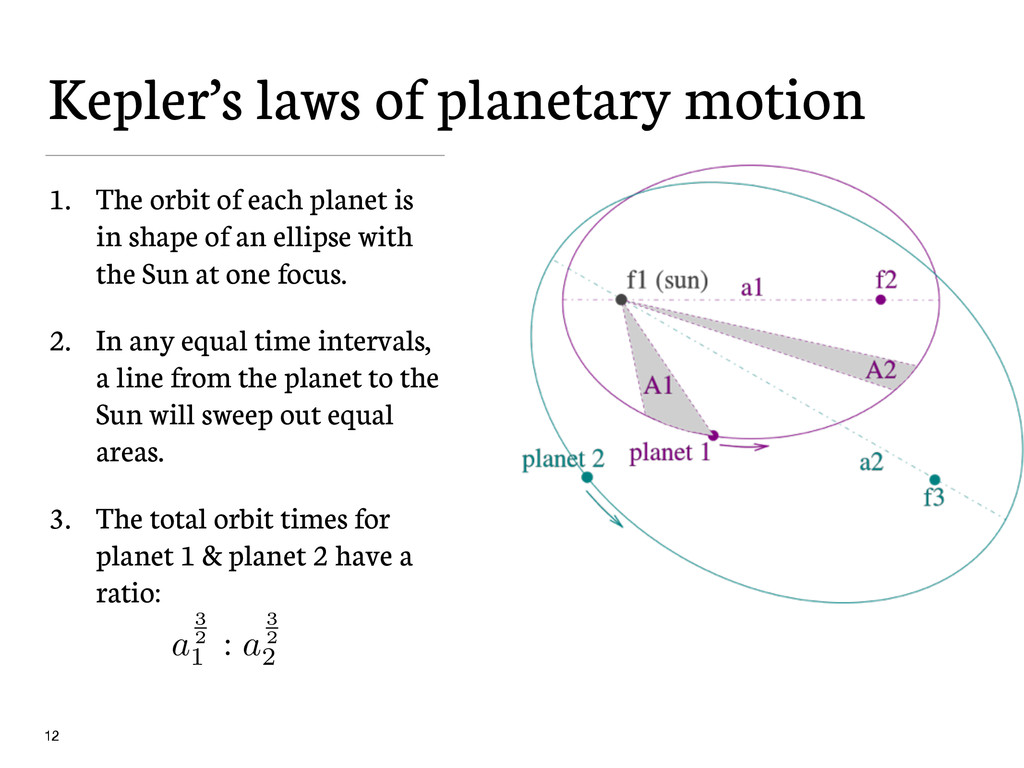
planet is in shape of an ellipse with the Sun at one focus. 2. In any equal time intervals, a line from the planet to the Sun will sweep out equal areas. 3. The total orbit times for planet 1 & planet 2 have a ratio: a 3 2 1 : a 3 2 2 12
heavenly machine is not a kind of divine living being but similar to a clockwork insofar as almost all the manifold motions are taken care of by one single absolutely simple magnetic bodily force, as in a clockwork all motion is taken care of by a simple weight. And indeed I also show how this physical representation can be presented by calculation and geometrically. 13
“No one must think that Newton’s creation can be overthrown in any real sense by this or any other theory. His clear and wide ideas will forever retain their significance as the foundation on which our modern conceptions of physics have been built.” 16
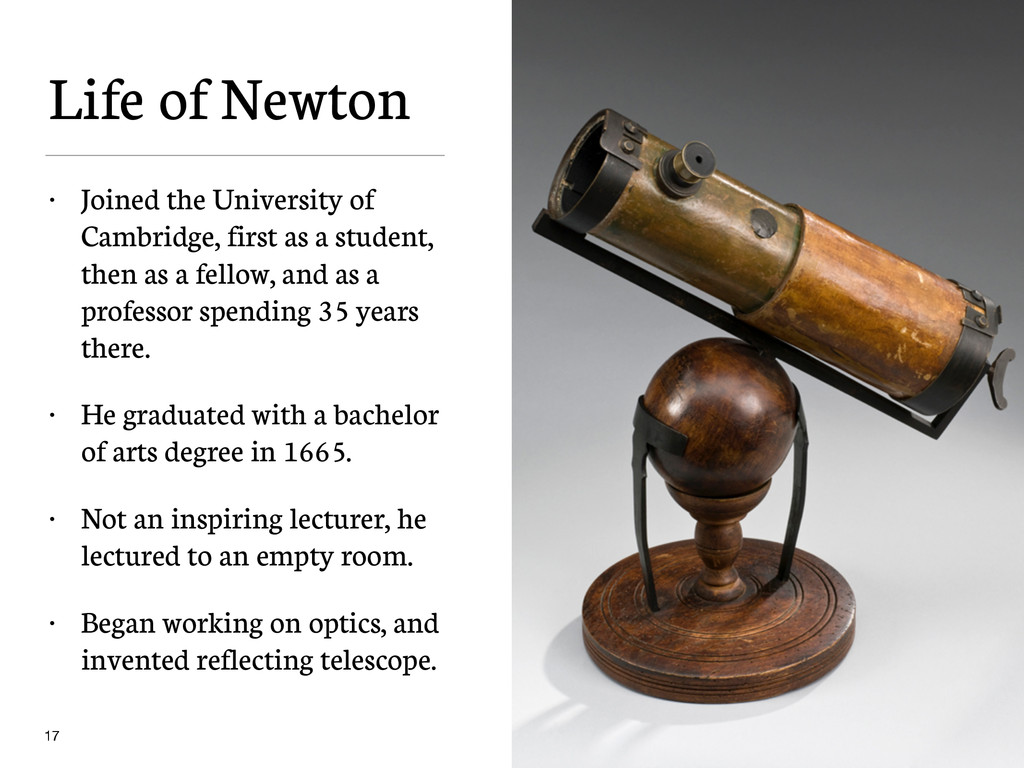
as a student, then as a fellow, and as a professor spending 35 years there. • He graduated with a bachelor of arts degree in 1665. • Not an inspiring lecturer, he lectured to an empty room. • Began working on optics, and invented reflecting telescope. 17
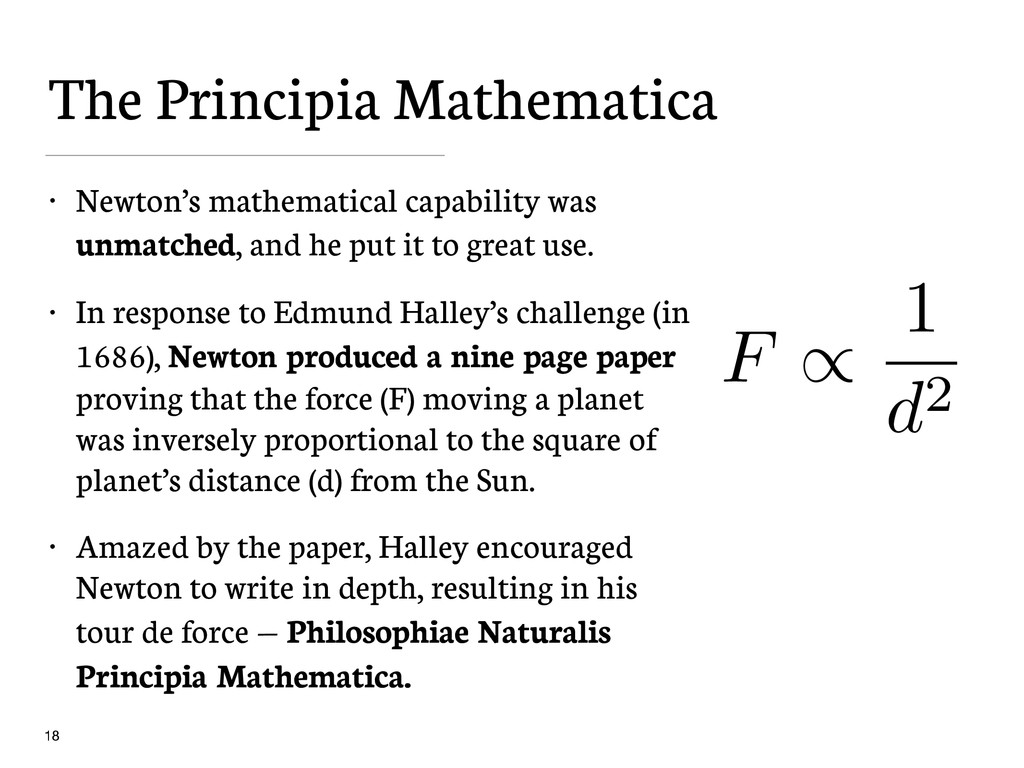
he put it to great use. • In response to Edmund Halley’s challenge (in 1686), Newton produced a nine page paper proving that the force (F) moving a planet was inversely proportional to the square of planet’s distance (d) from the Sun. • Amazed by the paper, Halley encouraged Newton to write in depth, resulting in his tour de force — Philosophiae Naturalis Principia Mathematica. F / 1 d2 18
Galileo — read all his notes, commentaries, and books. • Newton adopted Galileo’s definition of inertia — defined for heavenly bodies — to earthly bodies as his first law. • The next thing needed a rule to find how an object changes its speed if something is affecting it —> equating momentum to force became the second law. • Lastly, conservation of momentum, i.e., F = -F, became the third law. 19
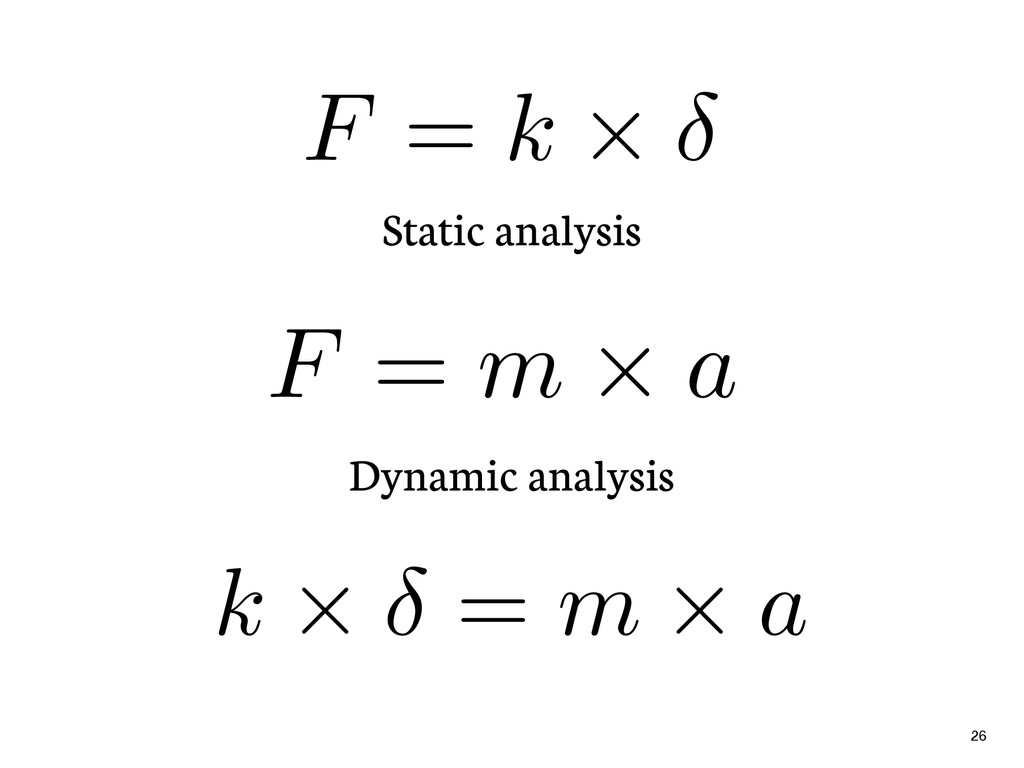
a method of determining how velocity changes under different influences called forces. • This is the founding equation in Structural Dynamics. F = m dv dt = ma F = d dt (mv) Note the slight difference between the two equations. The second one assumes constant mass — for simplicity. 20
on this here. • Classical: • Newtonian mechanics — kinematics (the original theory of motion), and dynamics (forces). • Statics — semi rigid bodies in mechanical equilibrium. • Solid mechanics, elasticity — properties of deformable bodies. • Fluid — motion of fluids. • Continuum — mechanics of continuation (both solids and fluids). • Hydraulics — mechanical properties of fluids. • Soil — mechanical behavior of soils. 21
Dynamics — Time variant • Dynamic systems can be linear if: 1. Amplitudes of displacement & load are proportional 2. Stress is proportional to strain (damping acceptable) 3. Mass needs to be constant 22
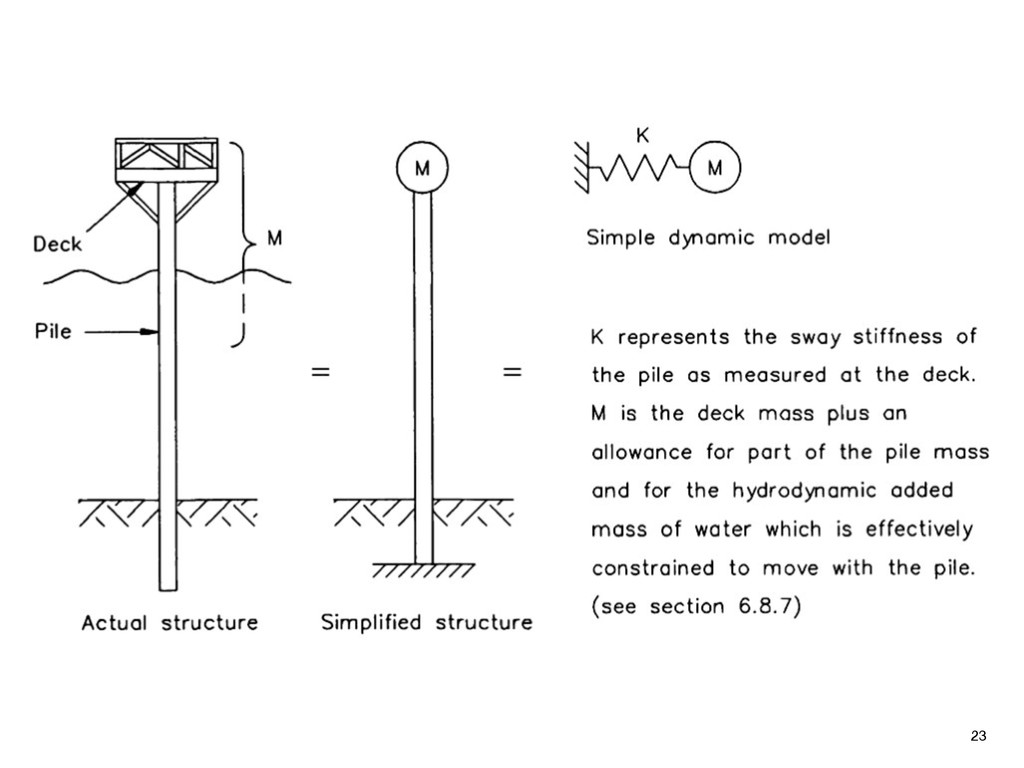
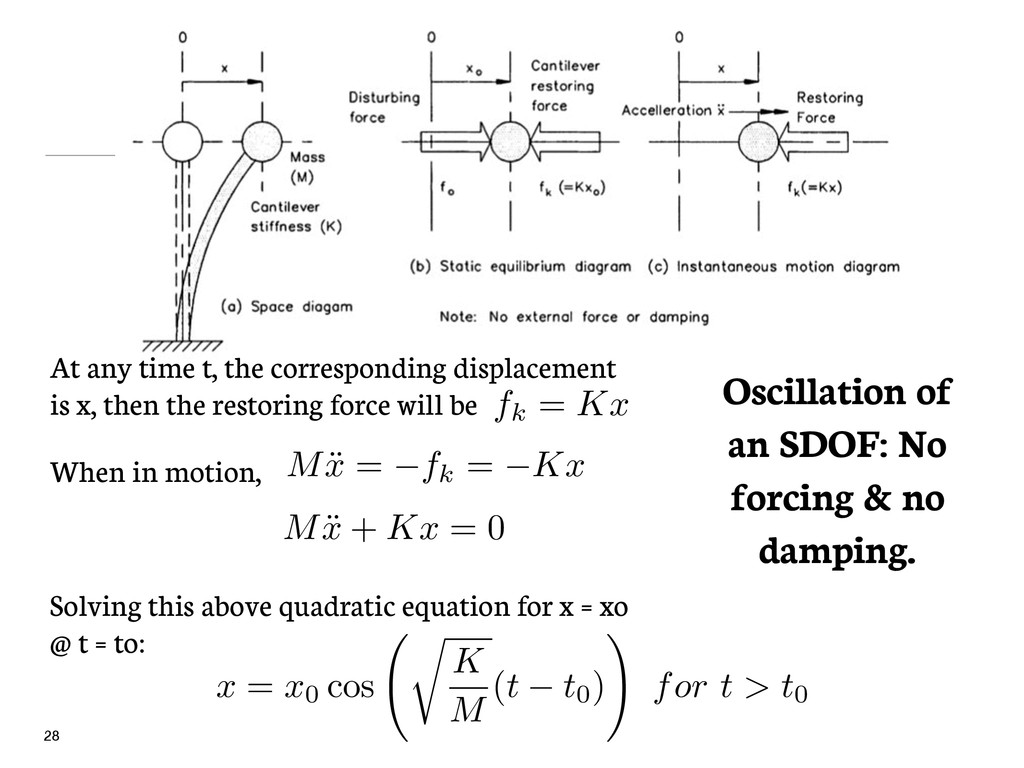
the restoring force will be When in motion, ! Solving this above quadratic equation for x = xo @ t = to: fk = Kx 28 M ¨ x = fk = Kx M ¨ x + Kx = 0 x = x0 cos r K M (t t0) ! for t > t0 Oscillation of an SDOF: No forcing & no damping.
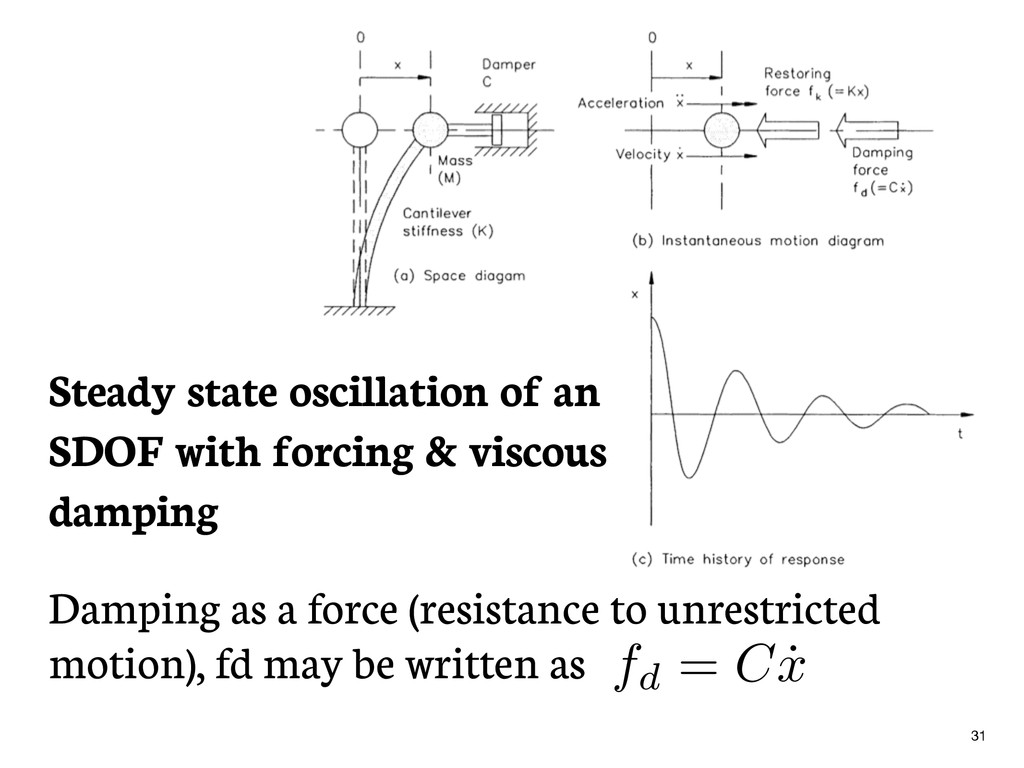
is a sinusoidally varying function of t at frequency The equation of motion thus becomes M ¨ x + C ˙ x + Kx = f0 cos ( !t ) f ( !t ) = f0 cos ( !t ) ! 32
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}