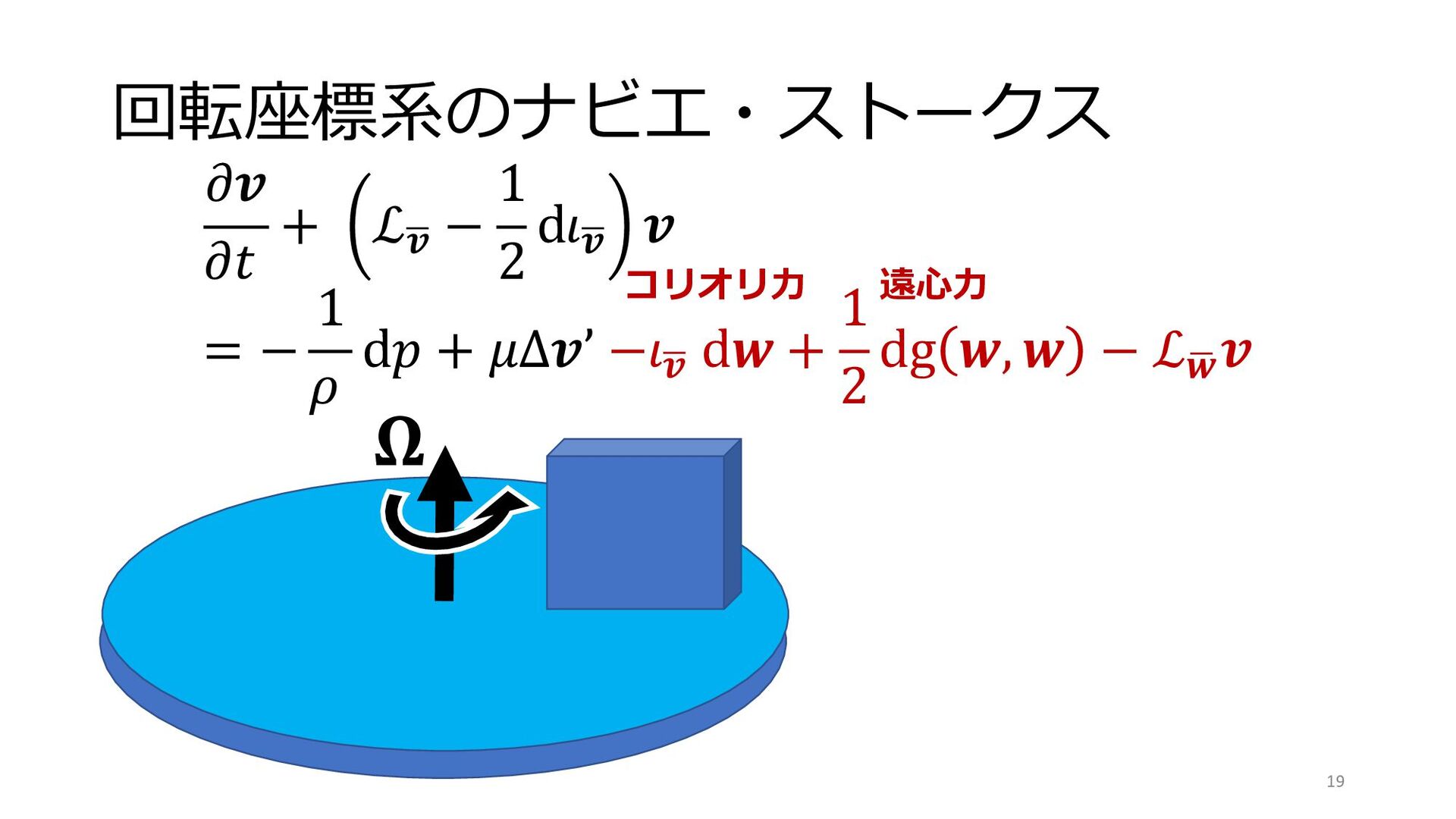
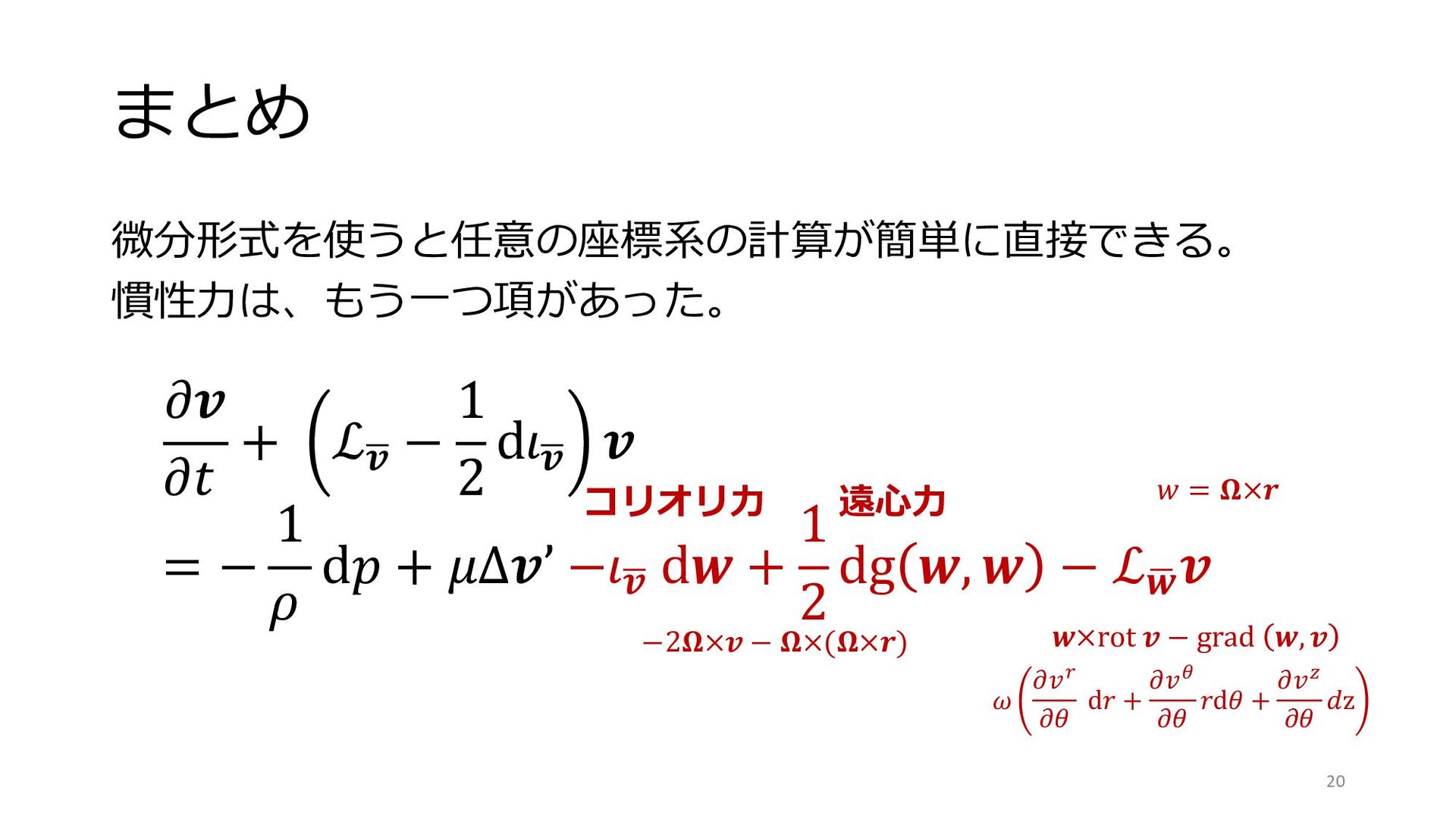
タービンやファンなど回転する羽を持つ流体機械の動的特性を知るには、羽が止まってみえる座標系、つまり回転座標系での流体方程式を調べることが役に立つ。回転座標系の流体方程式の導出をしている文献はほとんどない。2021年に書かれた論文では、デカルト座標からの座標変換をすることで回転座標系の流体方程式を導出しているものがあったが、計算が煩雑であり、幾何学的な意味をつかみにくい。微分形式で運動方程式を与えれば、任意の座標系での表式を簡単に得ることができる。そこで、流体方程式を微分形式で表し、回転座標系の流体方程式の導出を行った。その結果、従来知られていたコリオリ力や遠心力以外にも慣性項があることを見つけた。
https://connpass.com/event/241136/
![回転座標系での古典場の⽅程式 について。微分形式からの導出 2022年4⽉29⽇ 量⼦と古典の物理と幾何@オンライン DeepFlow株式会社 深川宏樹 [email protected] 1](https://files.speakerdeck.com/presentations/0473c1a9eeeb4134a8a6a7c630a6ca17/slide_0.jpg){kind=link}
![流体機械(シロッコファン) 2 https://www.youtube.com/watch?v=o1xFOIbhbzk Rotating-peg, r=10.5[m], 11.5[rad/s],Re=10^3. 圧力 速度](https://files.speakerdeck.com/presentations/0473c1a9eeeb4134a8a6a7c630a6ca17/slide_1.jpg){kind=link}
![シミュレーション結果 3 Rotating-peg, r=10.5[m], 11.5[rad/s],Re=10^3. 圧力 速度 https://www.youtube.com/watch?v=o1xFOIbhbzk](https://files.speakerdeck.com/presentations/0473c1a9eeeb4134a8a6a7c630a6ca17/slide_2.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}