Share
WebDB 夏のワークショップ「超高速データサイエンス」招待講演 https://amagata-daichi.notion.site/20ab718c179d80d9aa83d1962eb64283
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![方策としてのDB検索 ① 12 • MimicTouch [K.Yu+,CoRL’24] 人間のデモンストレーションからDBを構築し,検索実行 [K.Yu+,CoRL’24] MimicTouch: Leveraging](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_12.jpg){kind=link}
![方策としてのDB検索 ② 13 • R+X [Papagiannis+,ICRA’25] VLMを介してDBを検索し, ターゲットと類似する行動を再生 [G.Papagiannis+,ICRA’25] R+X](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_13.jpg){kind=link}
{kind=link}
![DB検索によって推論能力を拡張する① • 推論時に「観測を拡張するもの」として使うアイデア 15 [P.Humphreys+,NeurIPS’22] Large-scale Retrieval for Offline Reinforcement](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_15.jpg){kind=link}
![DB検索によって推論能力を拡張する② 16 • Retrieval-Augmented Generation (RAG) の仲間としてアイデアが再訪 [T.Schmied+,CoLLAs ‘25] Retrieval-Augmented](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_16.jpg){kind=link}
![コンテキストをGET DB検索によって推論能力を拡張する③ 17 [arXiv, 2025] RANa: Retrieval-Augmented Navigation • Retrieval-Augmented](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
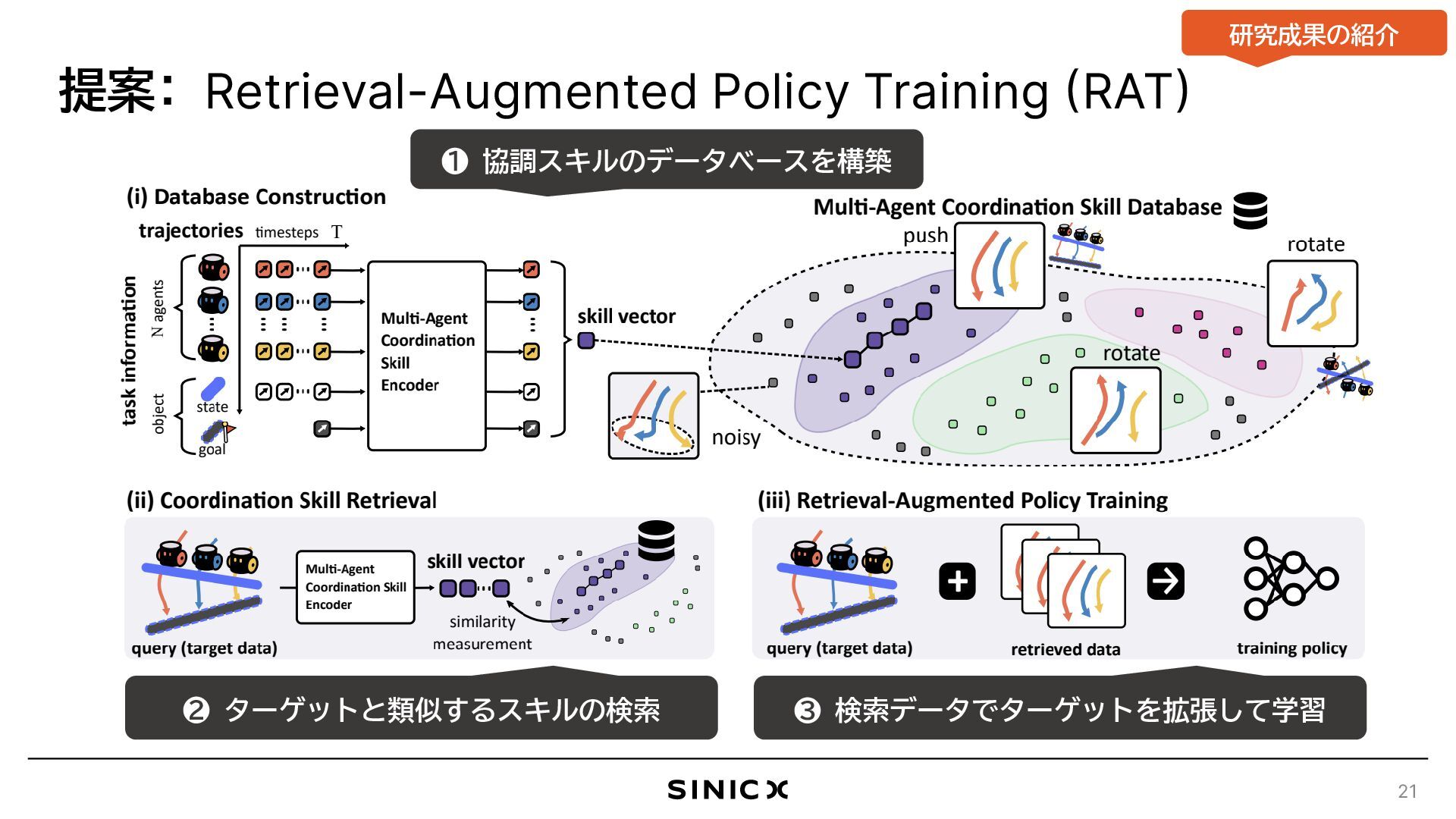
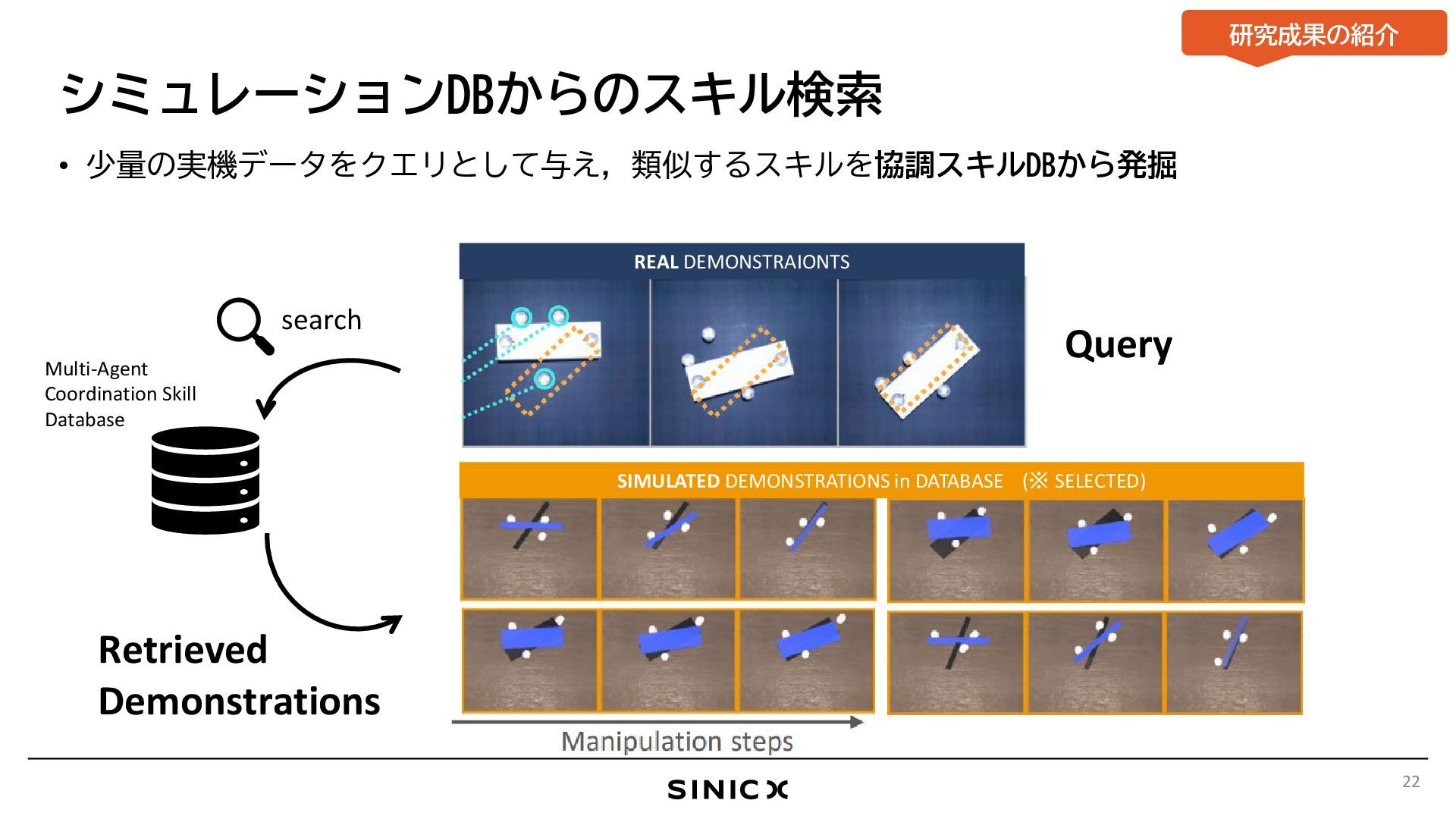
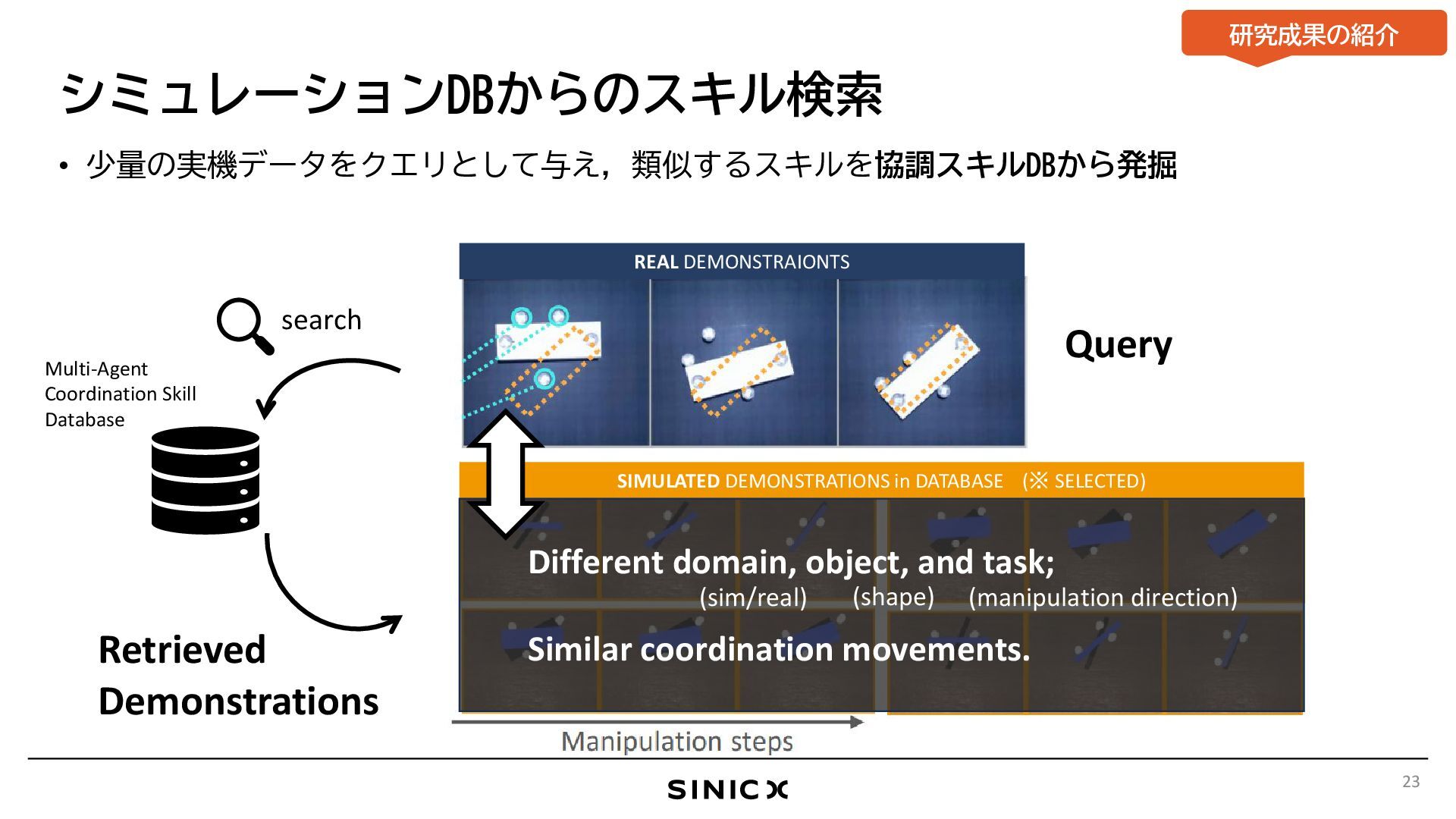
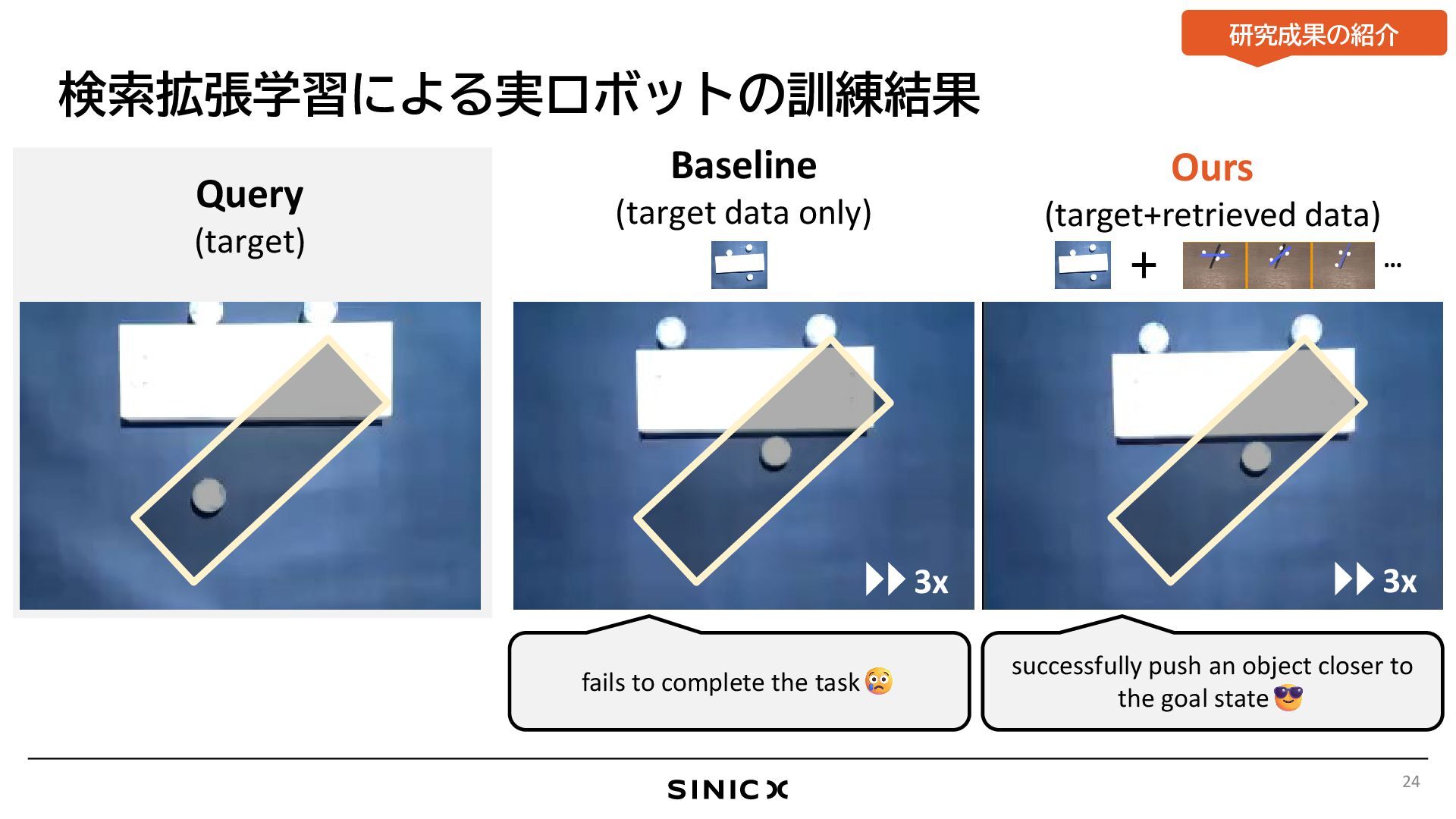
![DB検索 × 複数ロボットによる物体操作学習 [S.Kuroki+,IROS’24] 20 研究成果の紹介 [S.Kuroki+,IROS’24] Multi-Agent Behavior Retrieval:](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_20.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Swarm Body: 身体の一部のように操作する群ロボット [S.Ichihashi+,CHI’24] 25 [S.Ichihashi+,CHI’24] Swarm Body: Embodied Swarm](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_25.jpg){kind=link}
{kind=link}
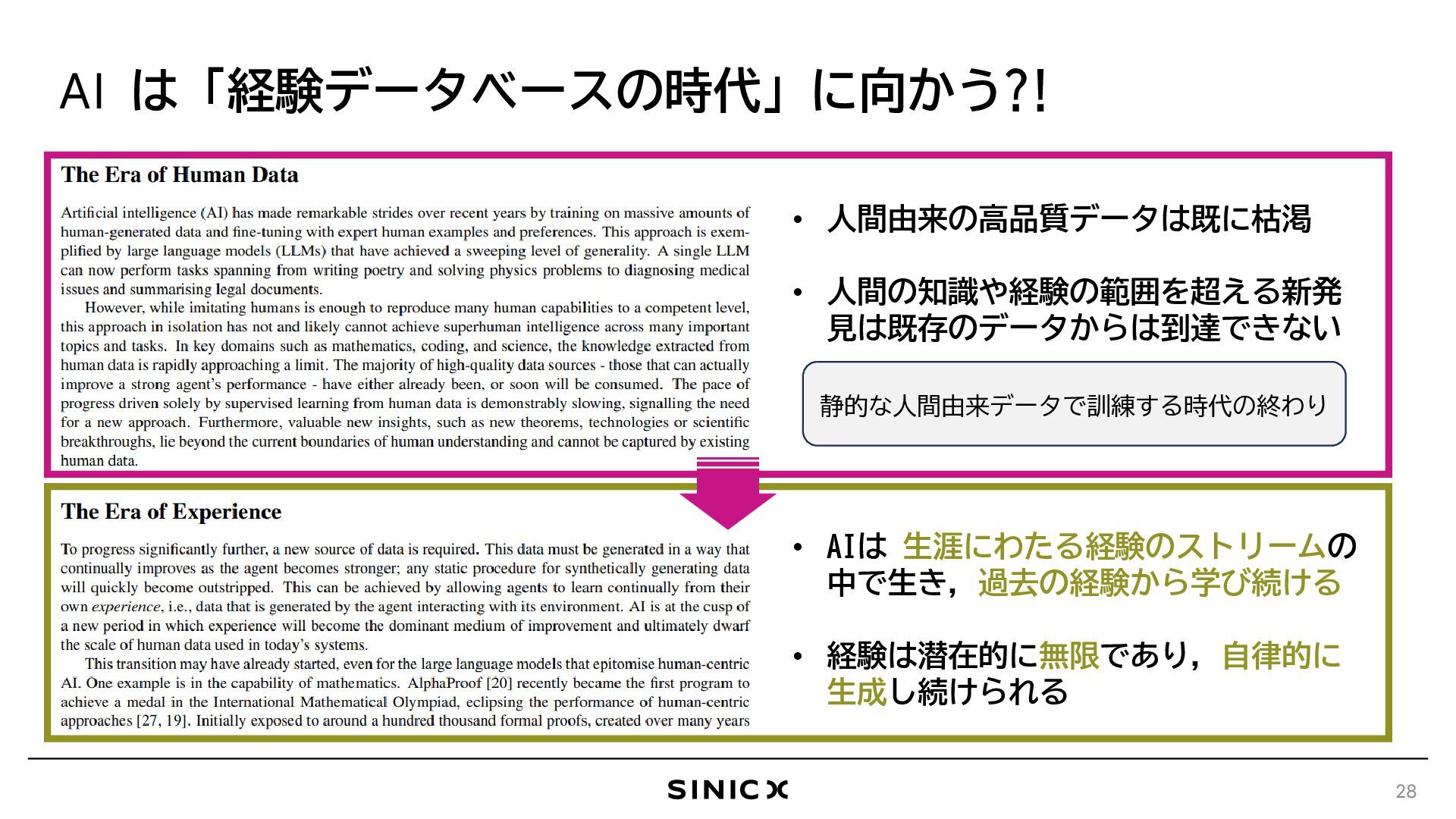
![AI は「経験の時代」に向かう [R.Sutton,2025.04] 27](https://files.speakerdeck.com/presentations/01e94e3f5dc44dc28411b76ceb3967cf/slide_27.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}