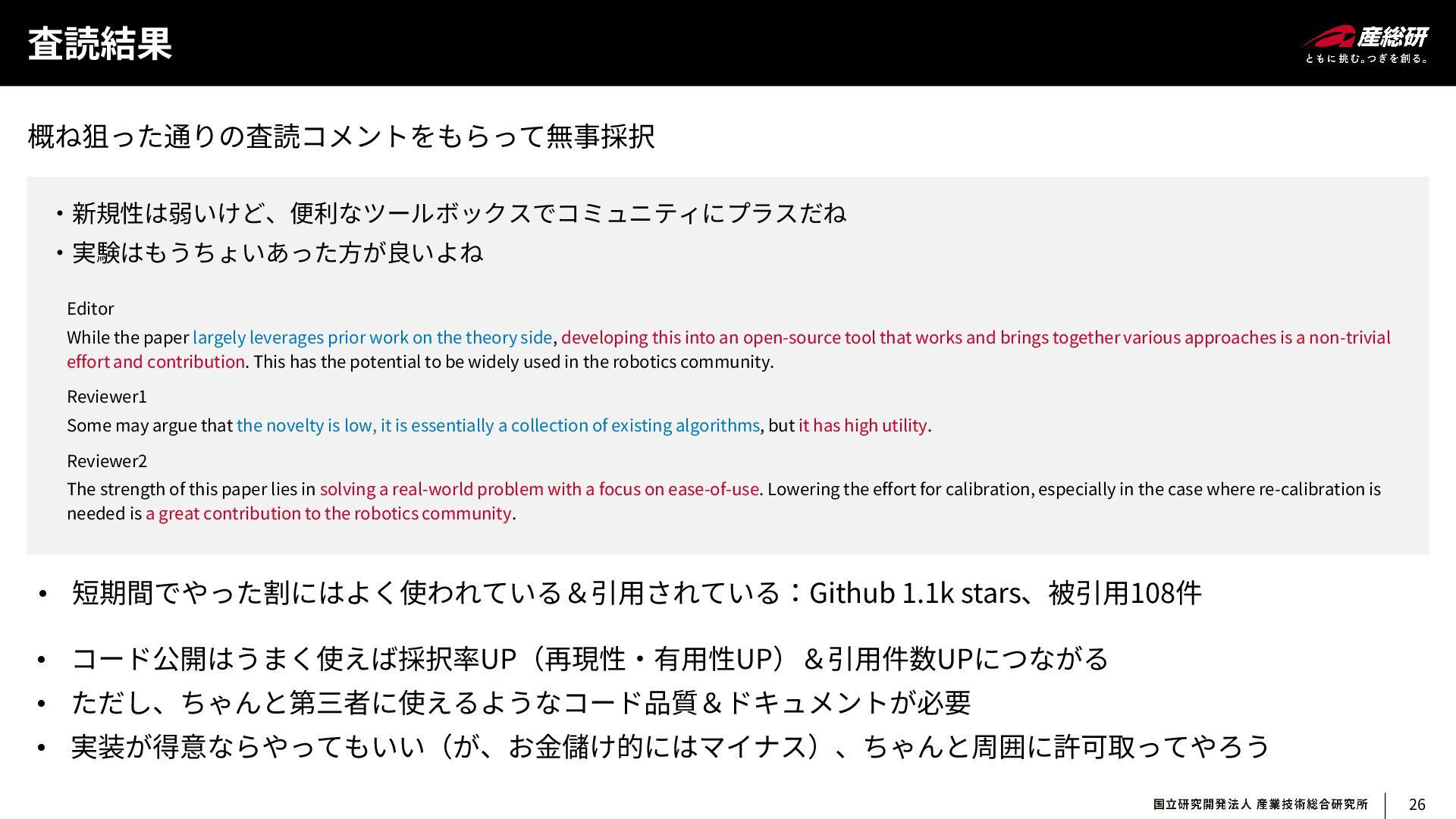
on the theory side, developing this into an open-source tool that works and brings together various approaches is a non-trivial effort and contribution. This has the potential to be widely used in the robotics community. 概ね狙った通りの査読コメントをもらって無事採択 • コード公開はうまく使えば採択率UP(再現性・有用性UP)&引用件数UPにつながる • ただし、ちゃんと第三者に使えるようなコード品質&ドキュメントが必要 • 実装が得意ならやってもいい(が、お金儲け的にはマイナス)、ちゃんと周囲に許可取ってやろう Reviewer1 Some may argue that the novelty is low, it is essentially a collection of existing algorithms, but it has high utility. Reviewer2 The strength of this paper lies in solving a real-world problem with a focus on ease-of-use. Lowering the effort for calibration, especially in the case where re-calibration is needed is a great contribution to the robotics community. ・新規性は弱いけど、便利なツールボックスでコミュニティにプラスだね ・実験はもうちょいあった方が良いよね • 短期間でやった割にはよく使われている&引用されている:Github 1.1k stars、被引用108件
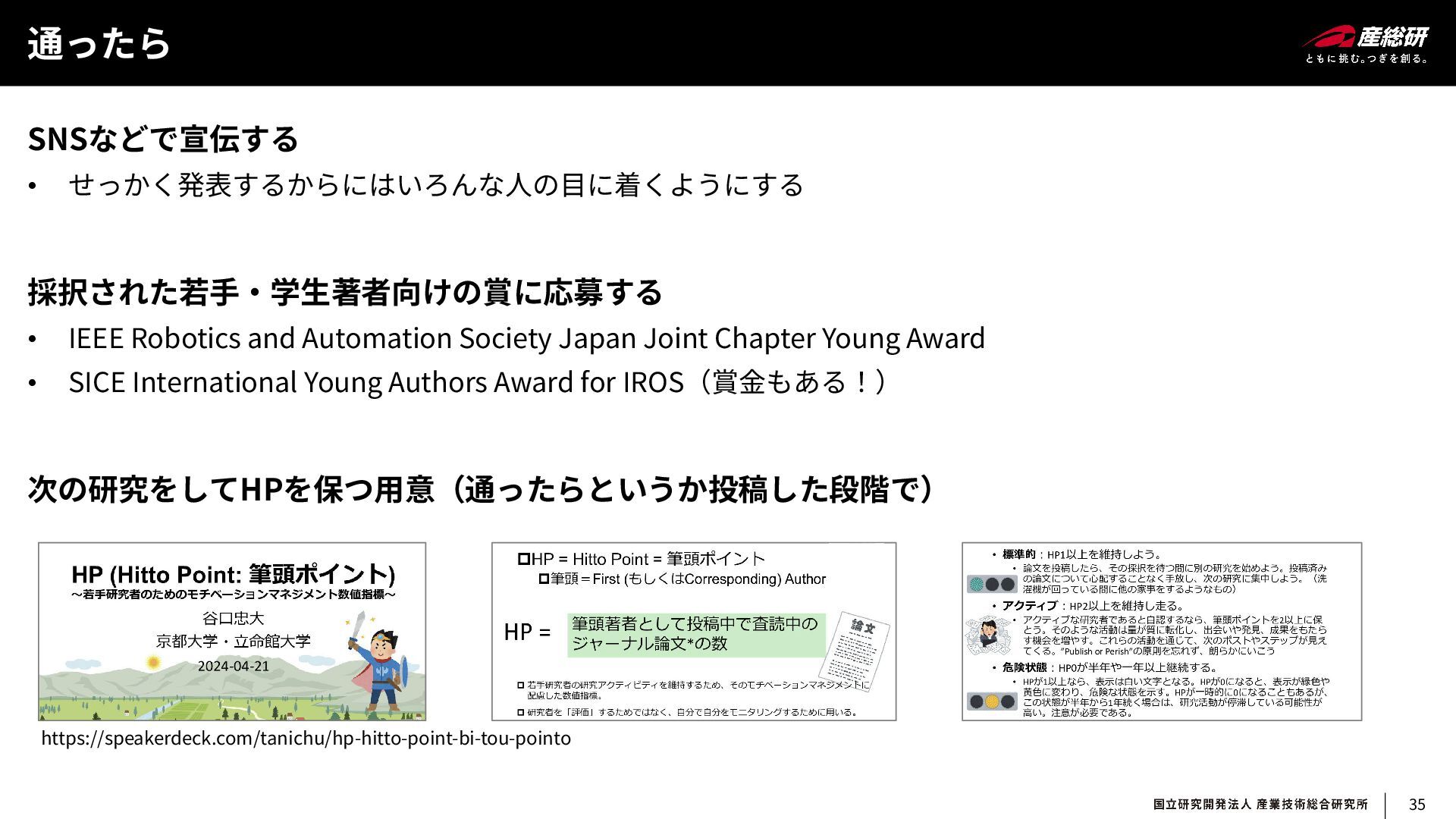
Joint Chapter Young Award • SICE International Young Authors Award for IROS(賞金もある!) SNSなどで宣伝する • せっかく発表するからにはいろんな人の目に着くようにする 次の研究をしてHPを保つ用意(通ったらというか投稿した段階で) https://speakerdeck.com/tanichu/hp-hitto-point-bi-tou-pointo
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}