Introduction
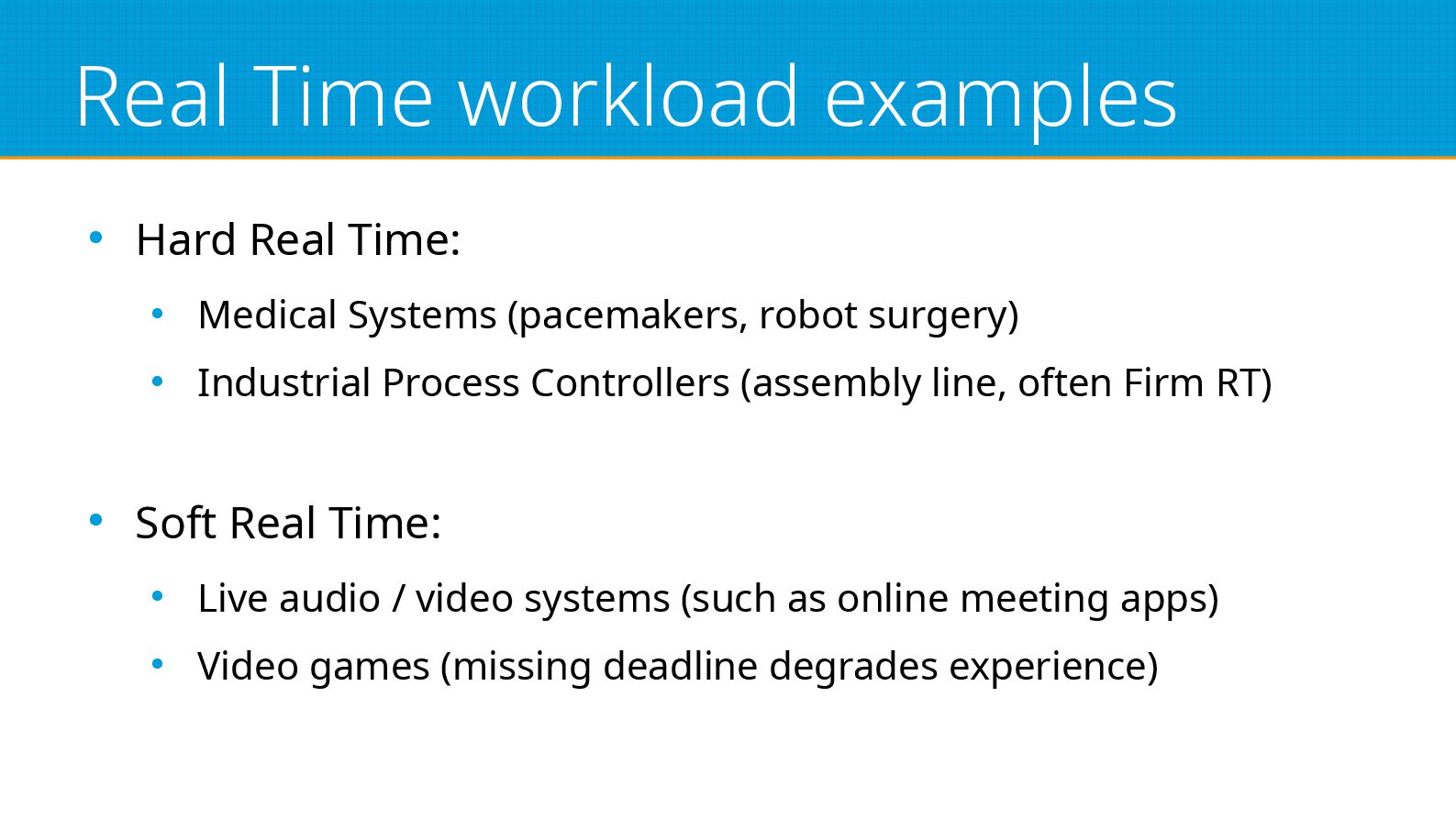
What is Real-Time & why does it matter
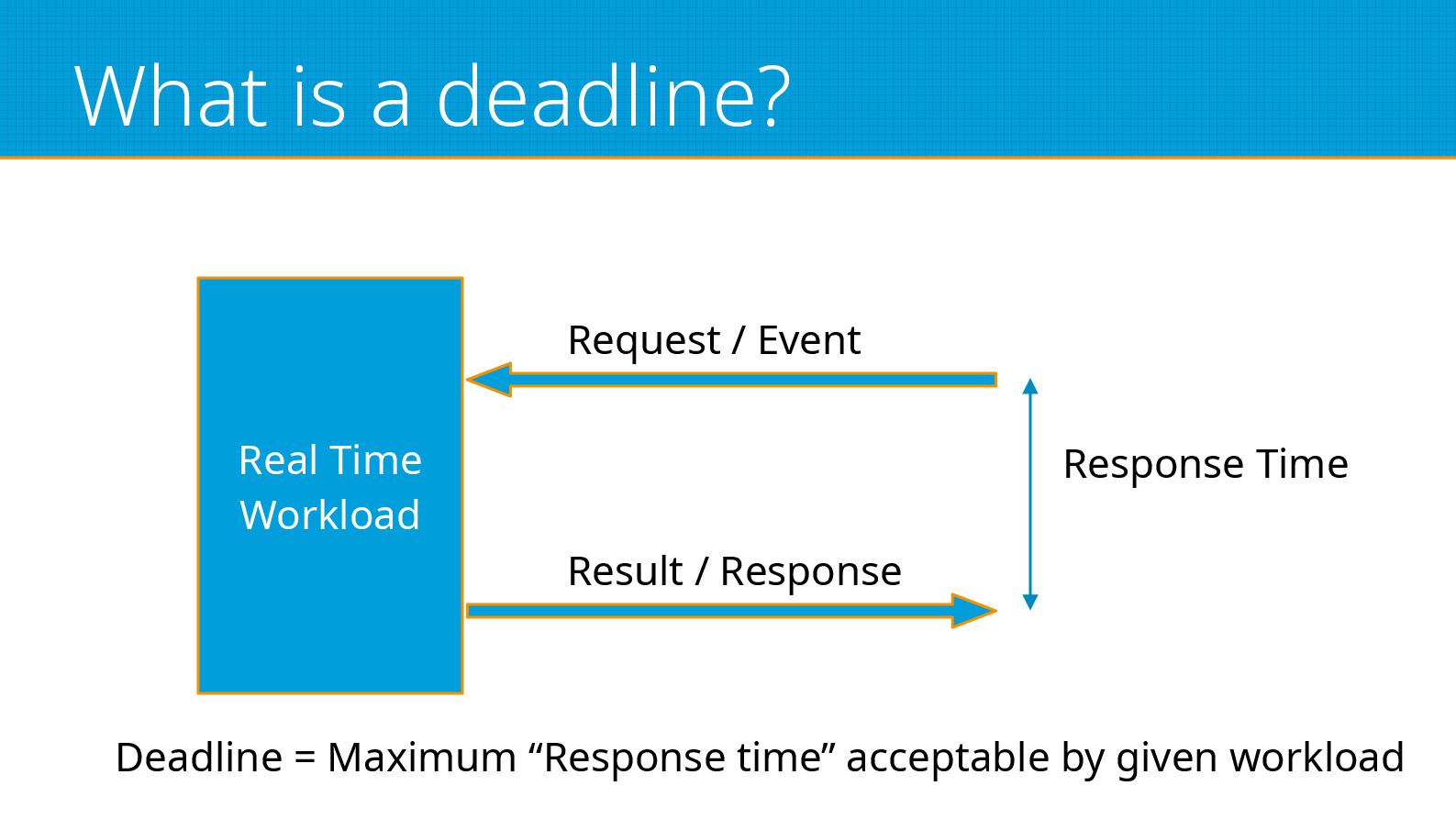
What is a deadline
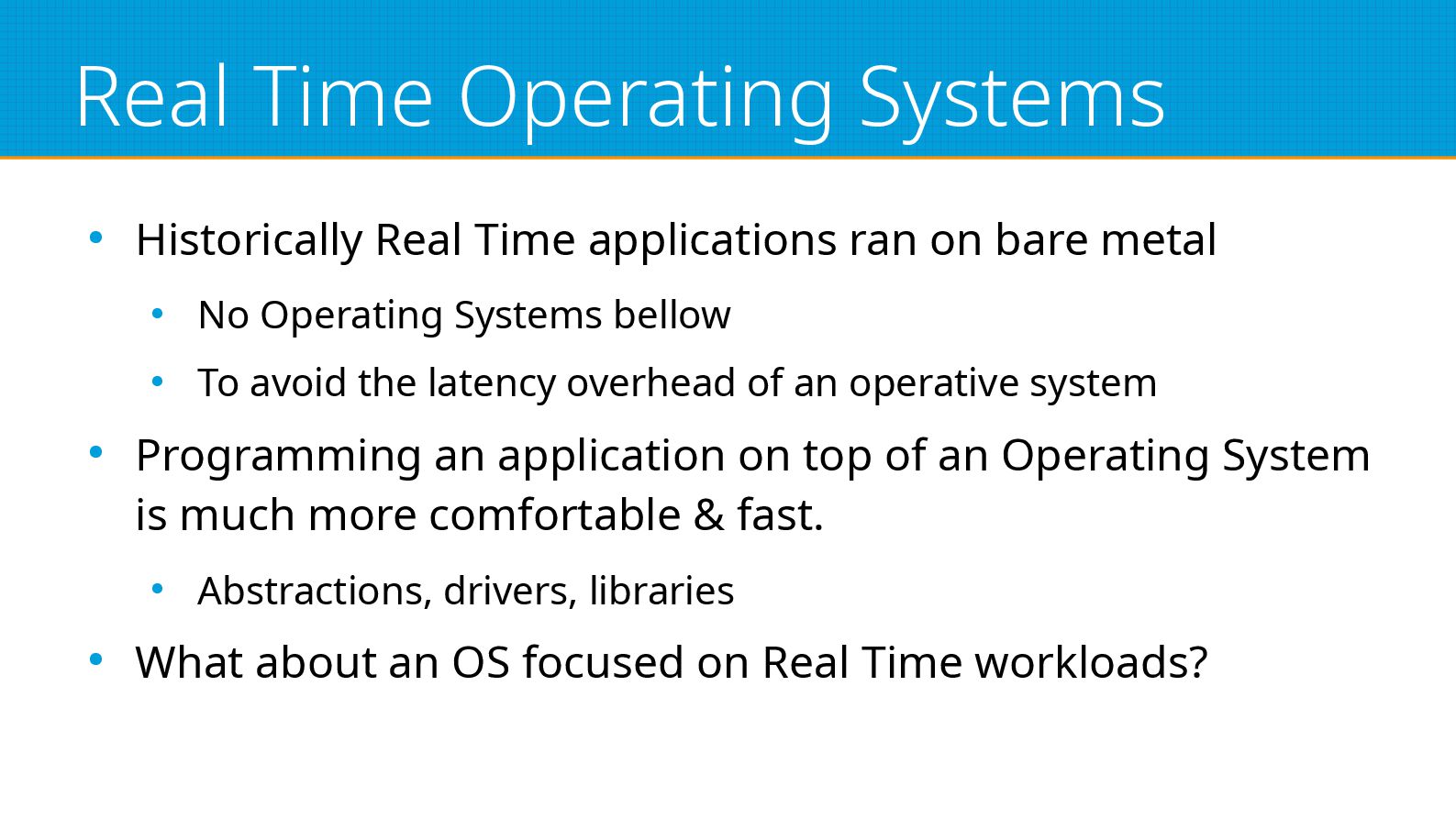
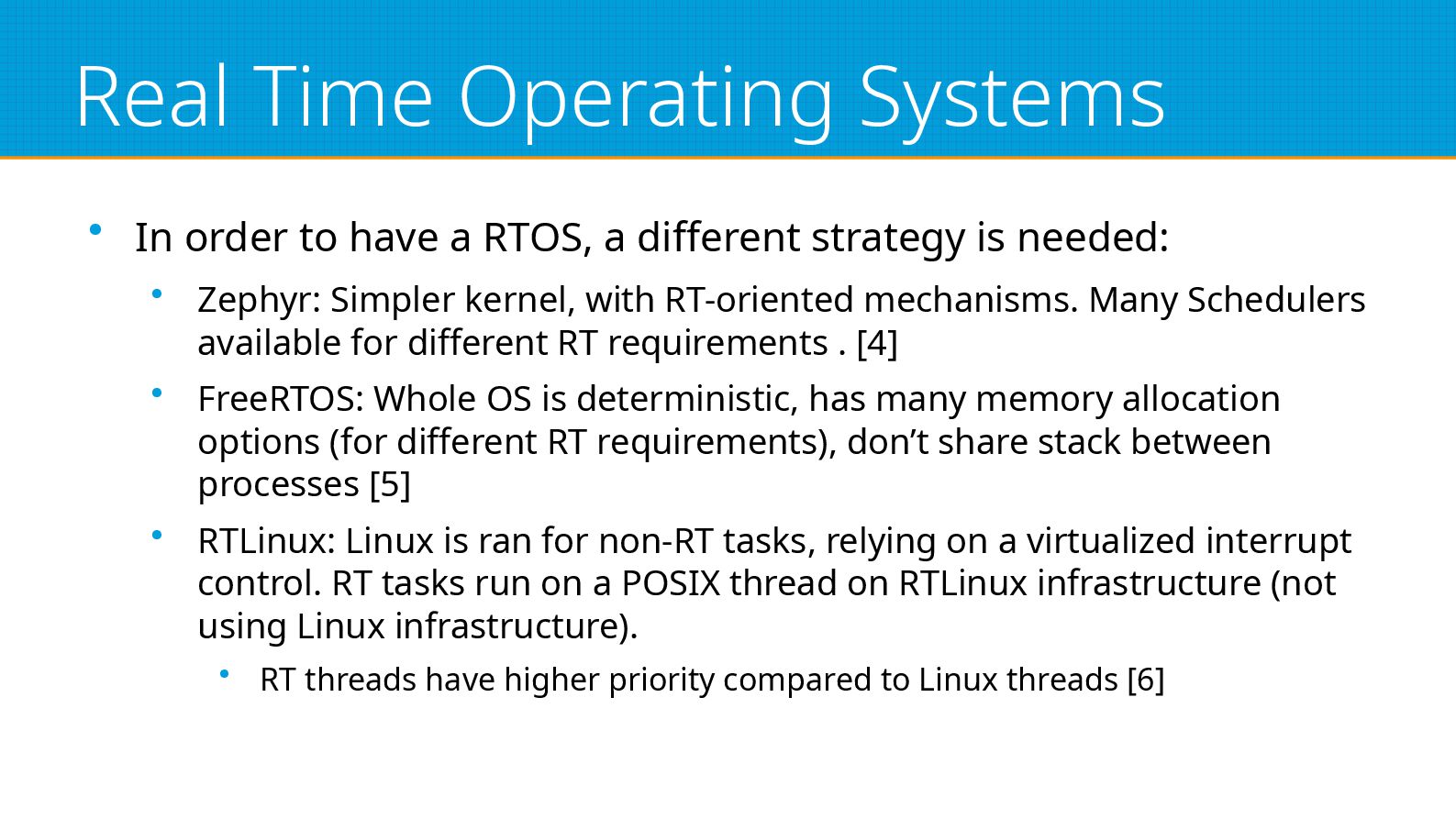
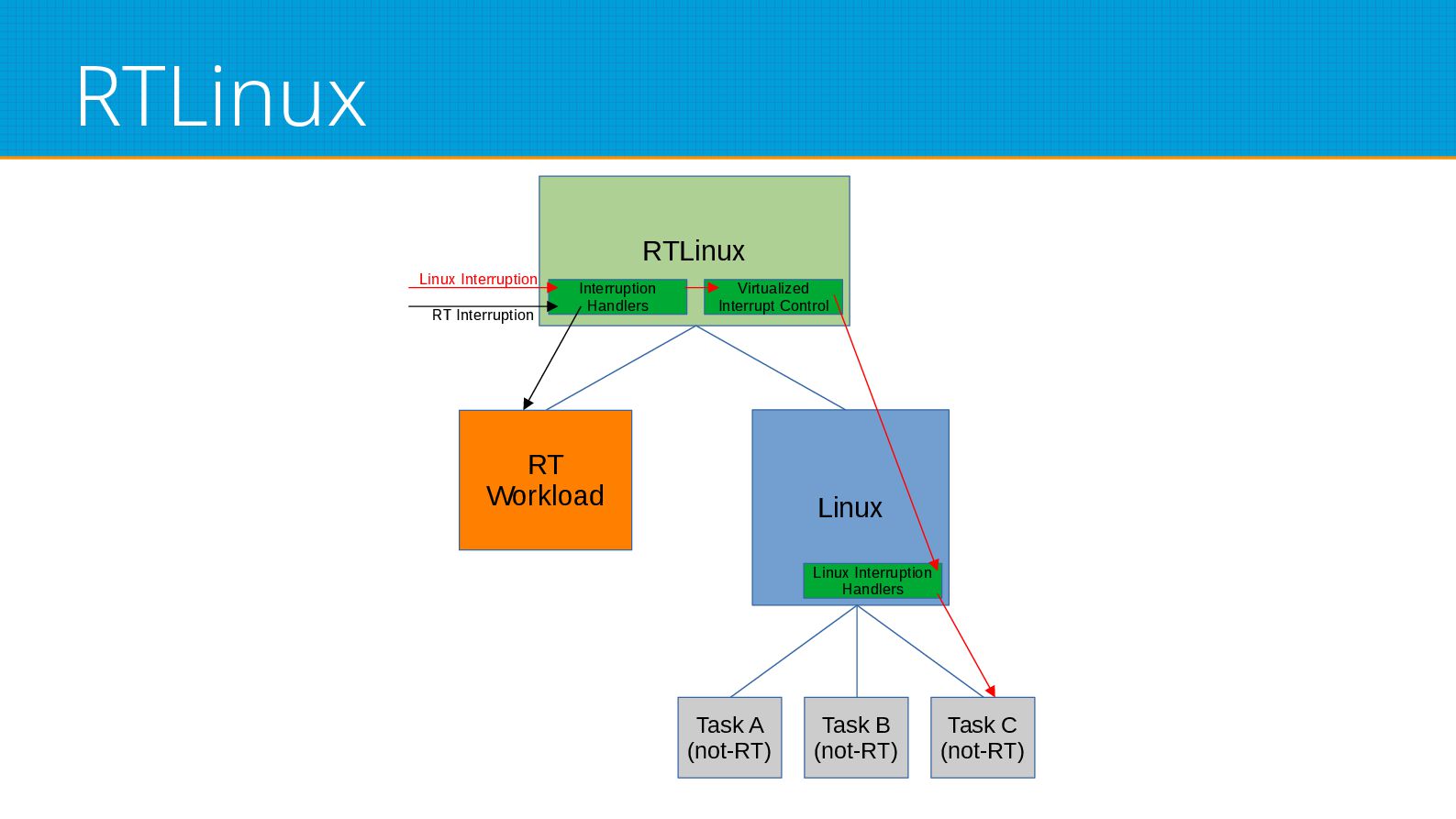
Why a Real-Time Operating System, and examples
What about Linux? Does it work?
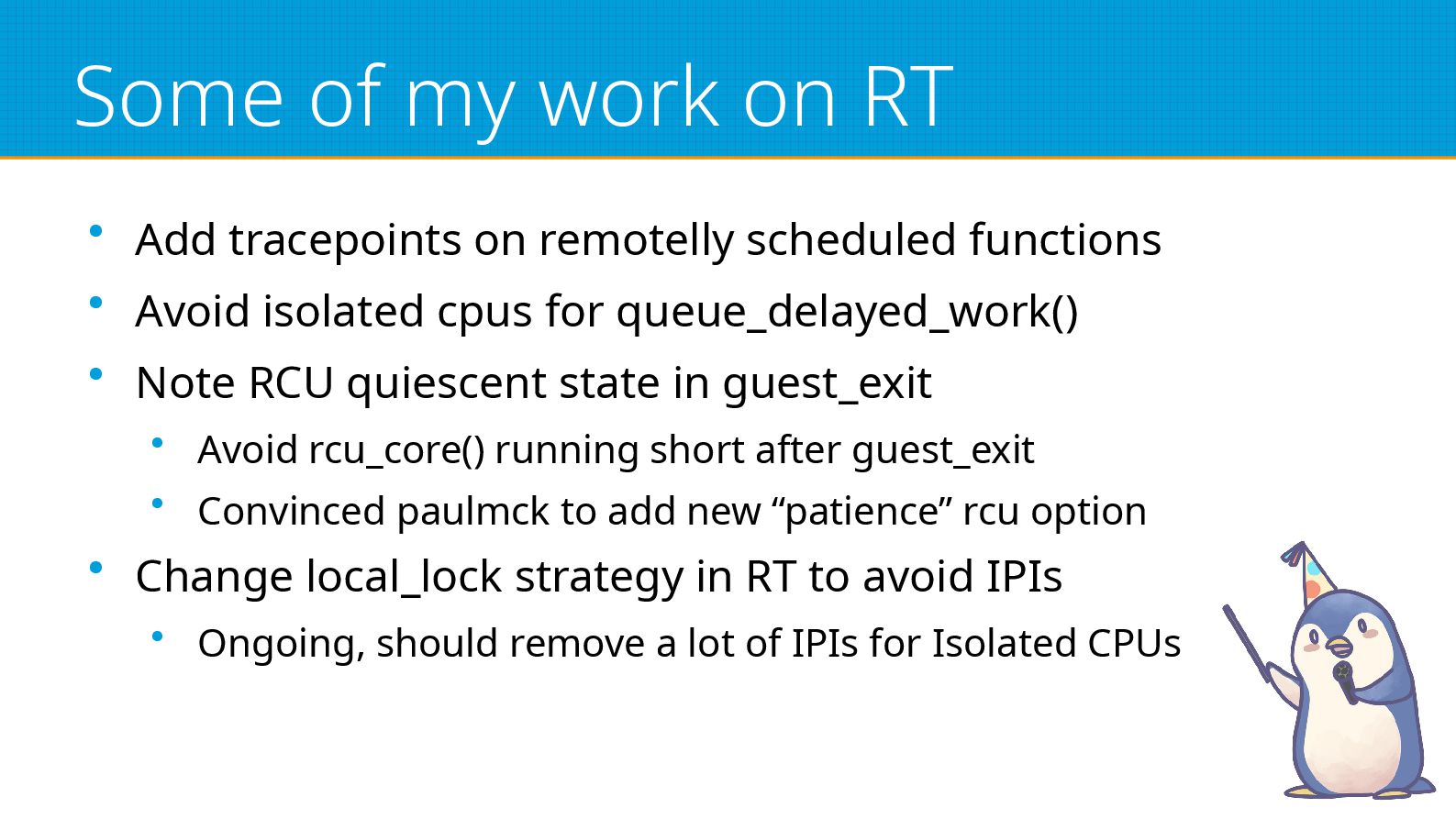
Improving Real-Time behavior on Linux
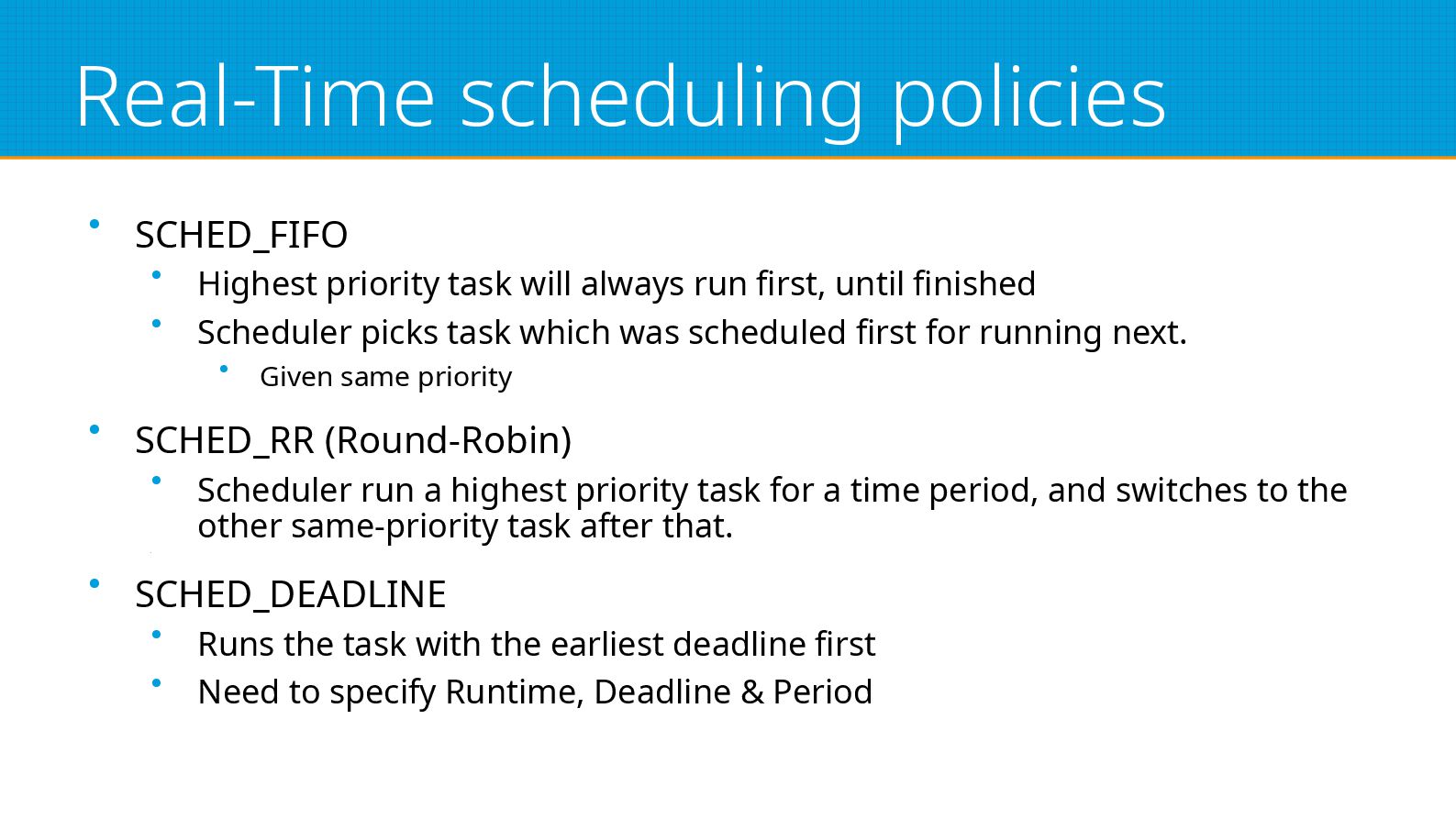
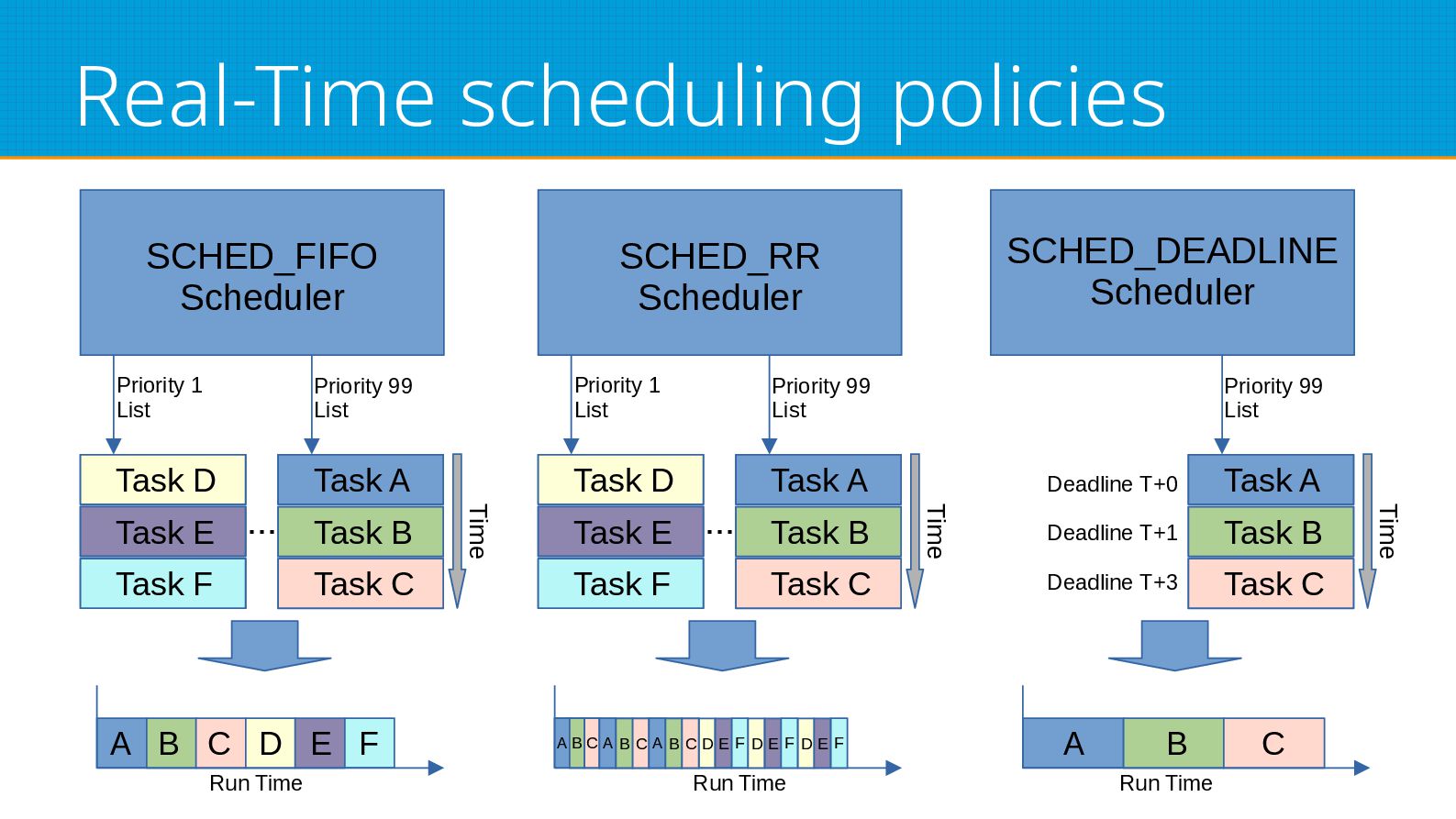
Real-time scheduling policies
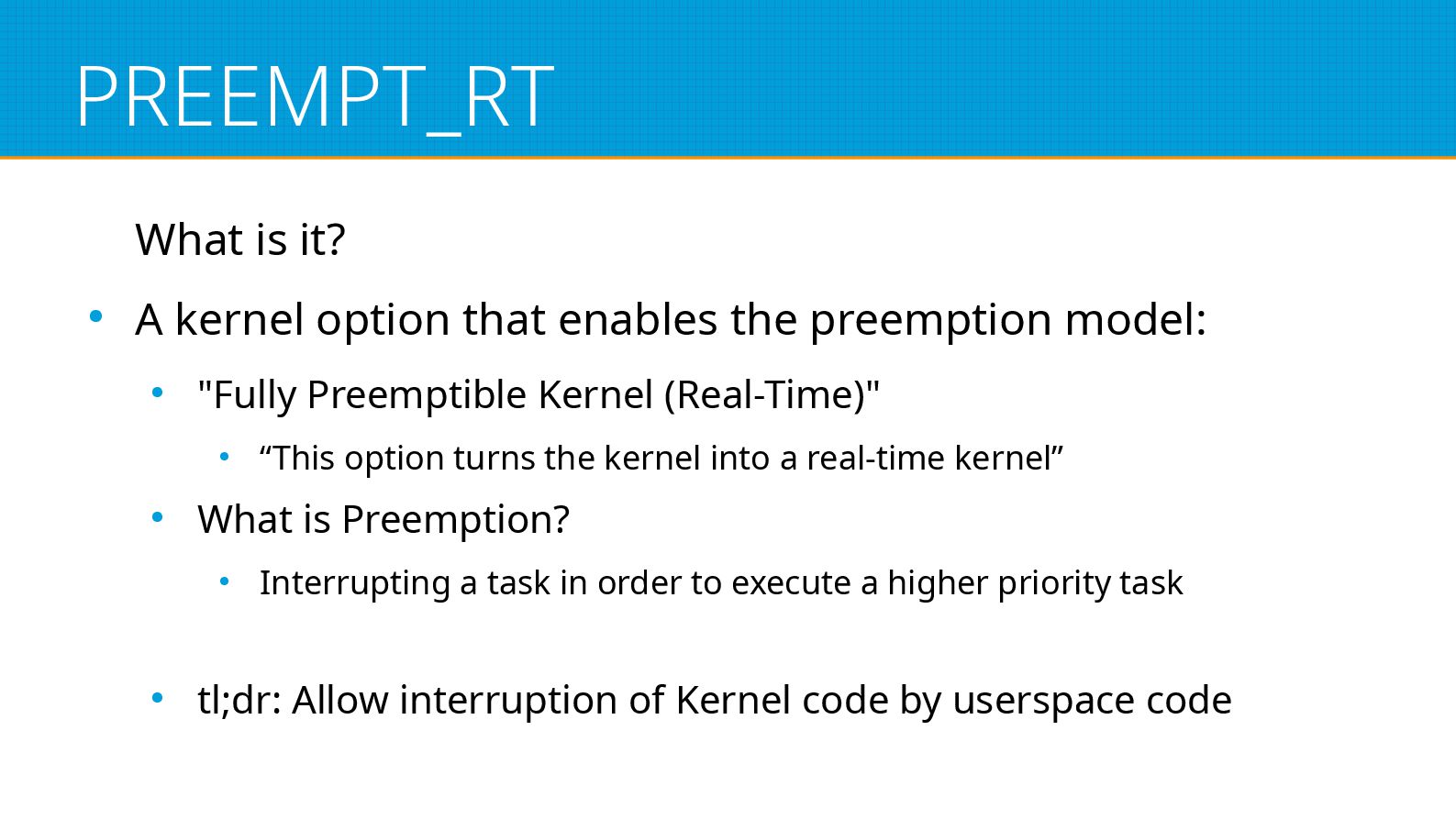
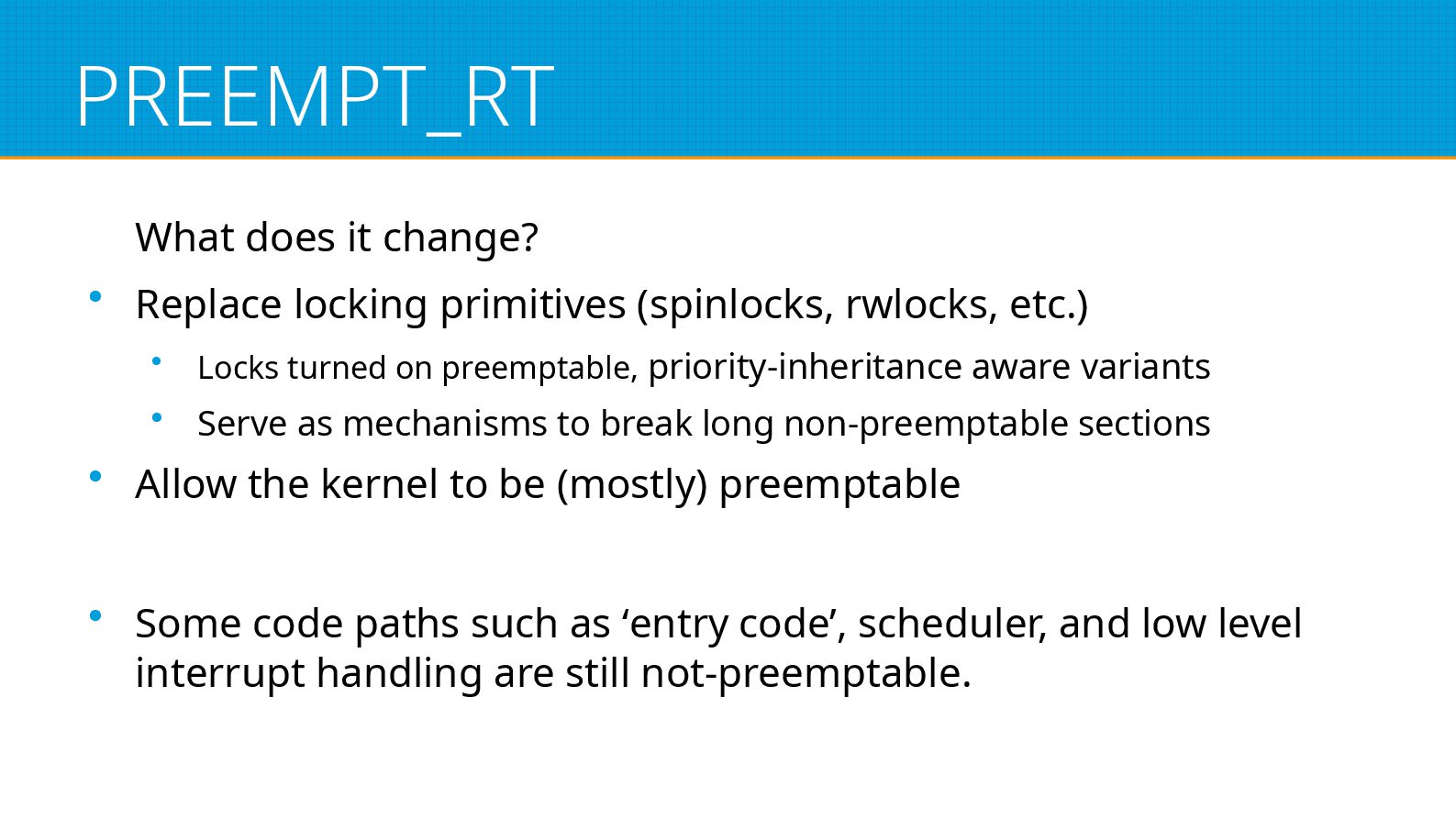
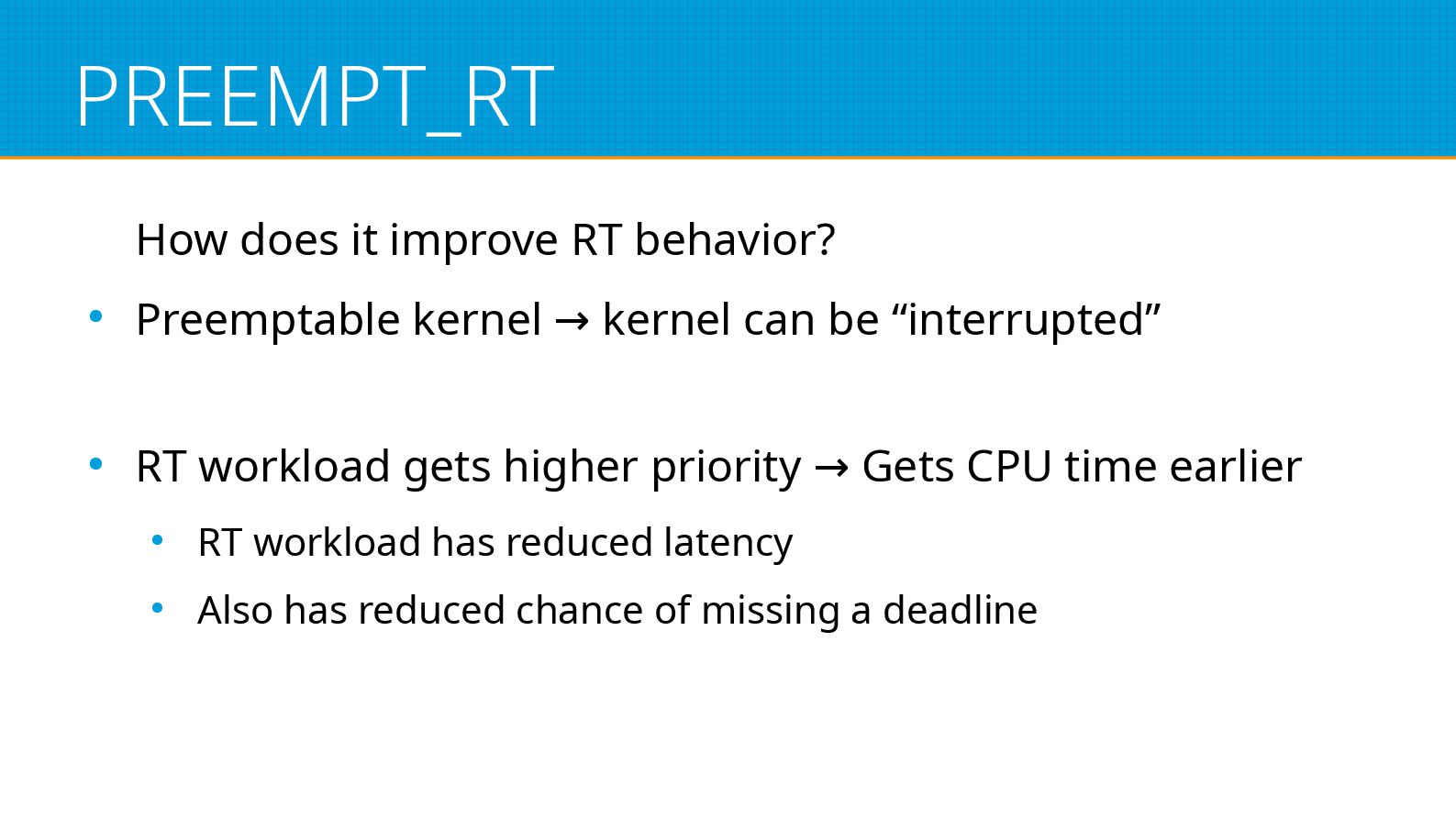
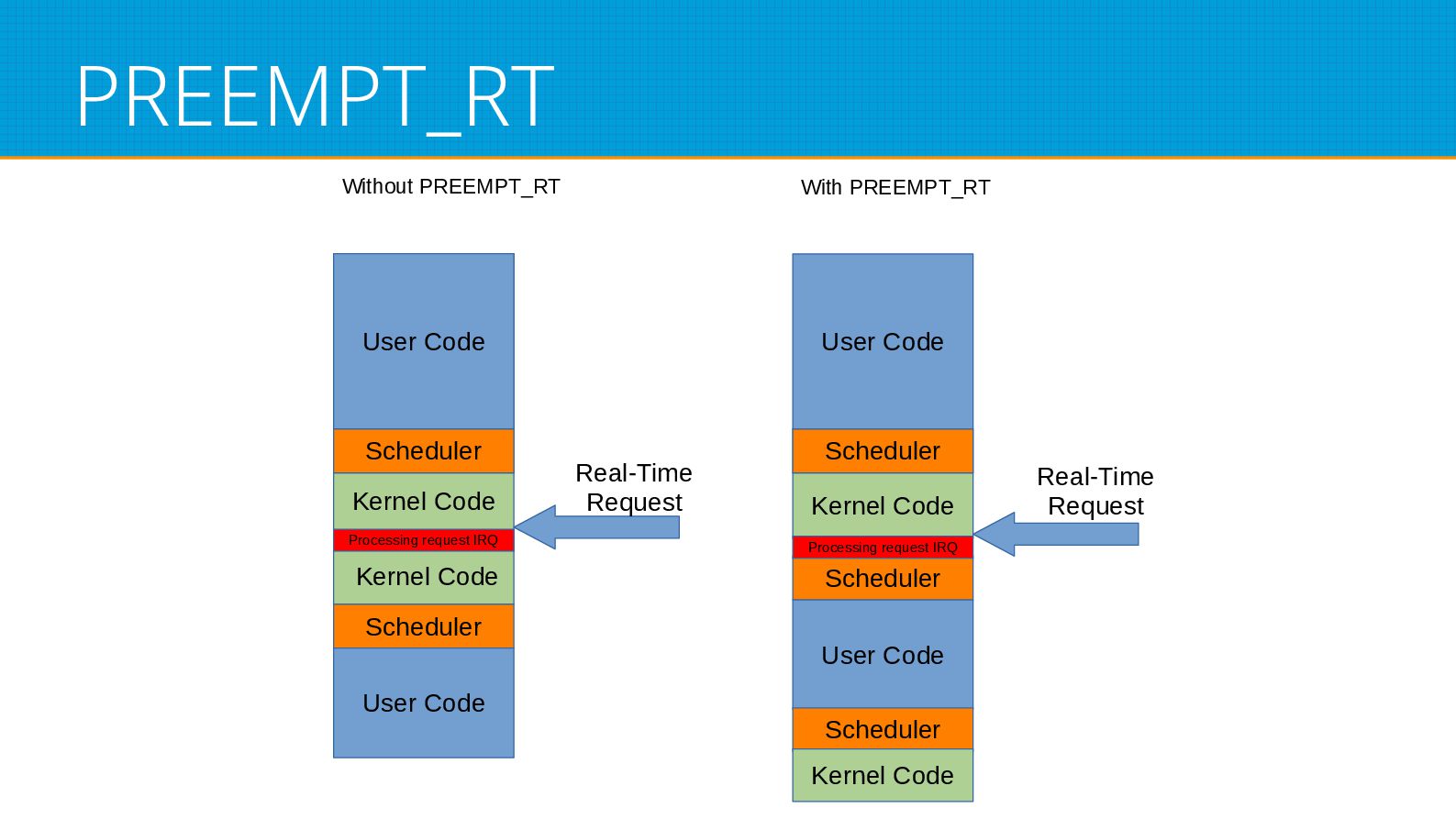
PREEMPT_RT
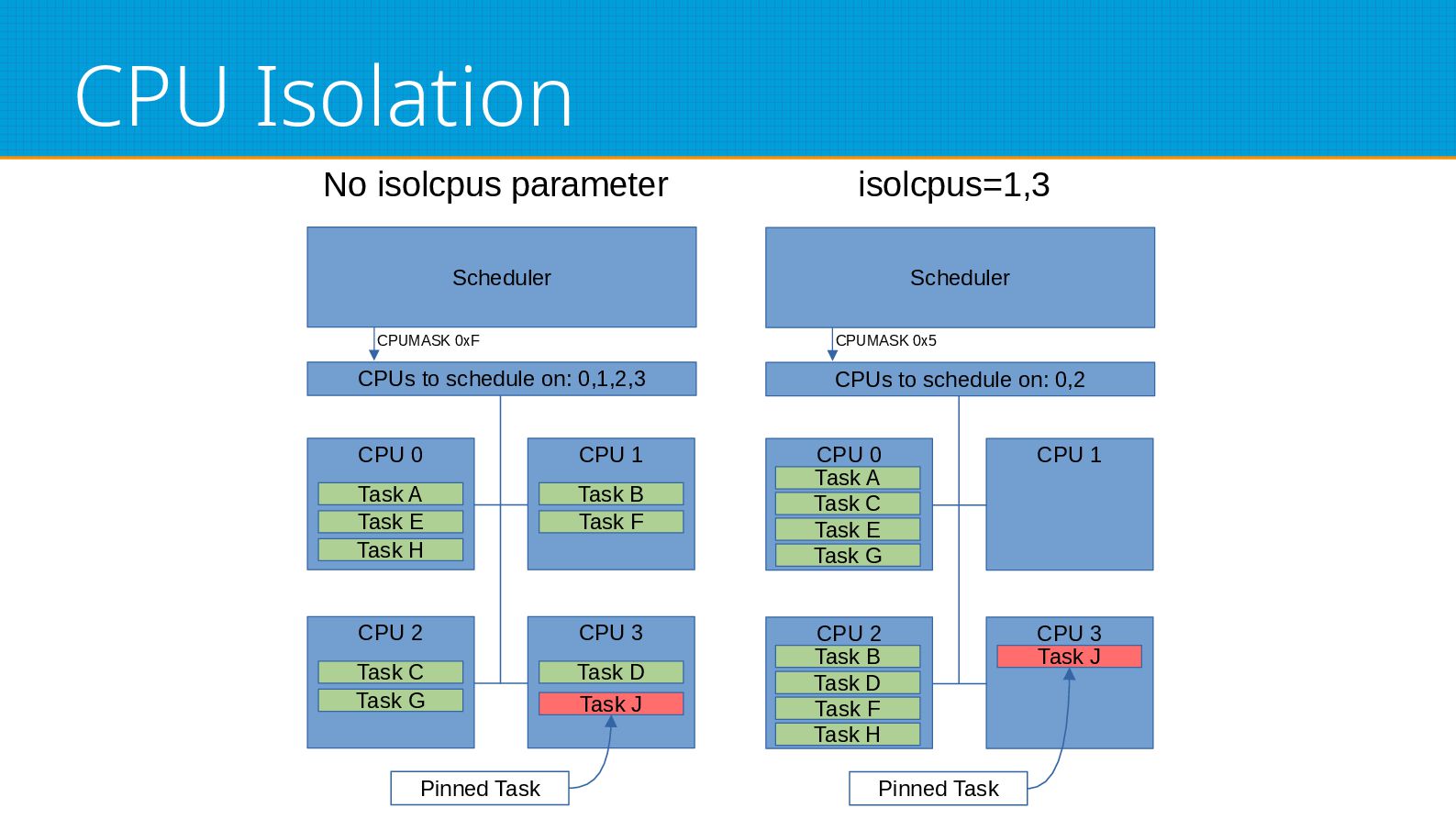
CPU Isolation
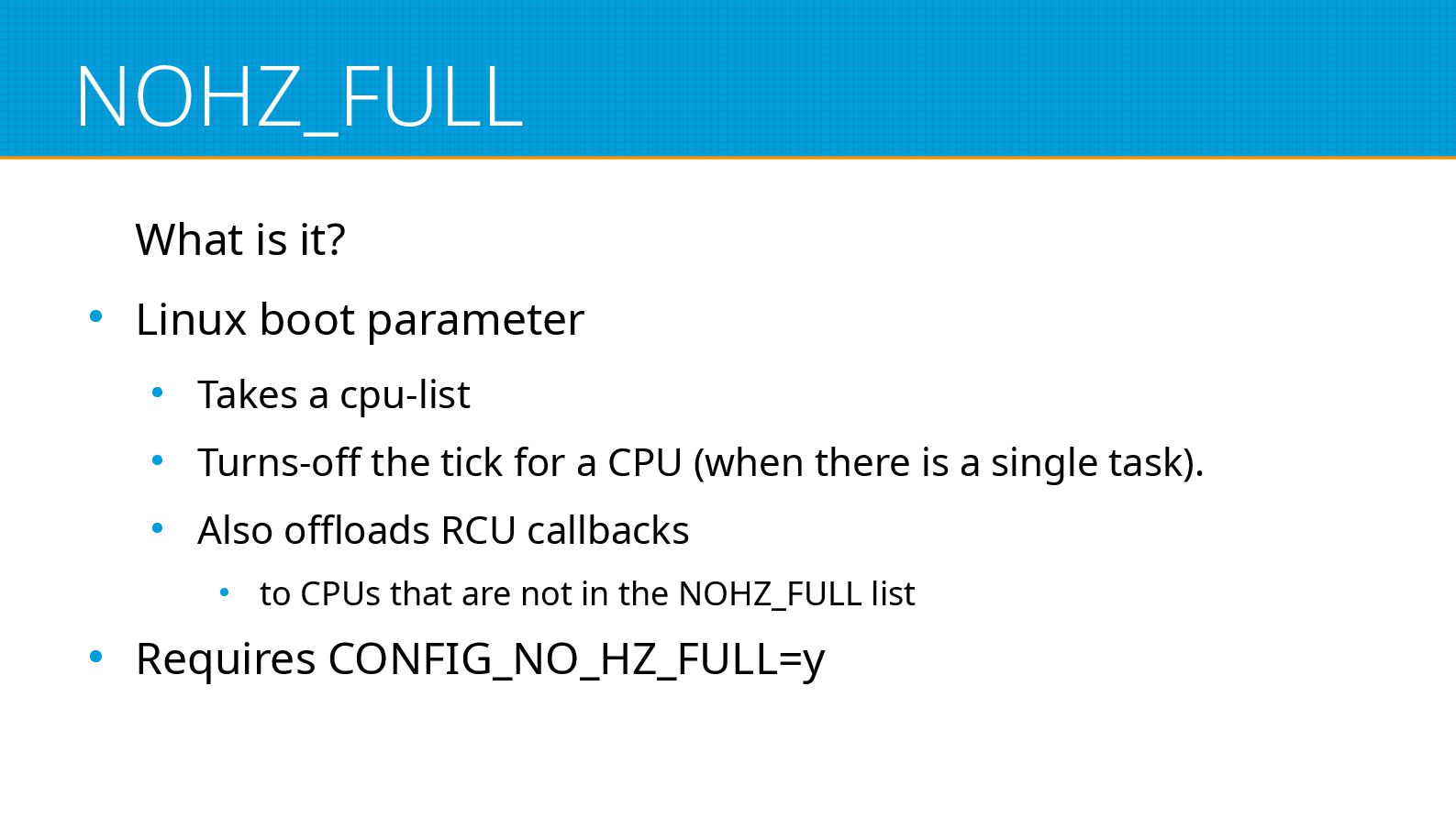
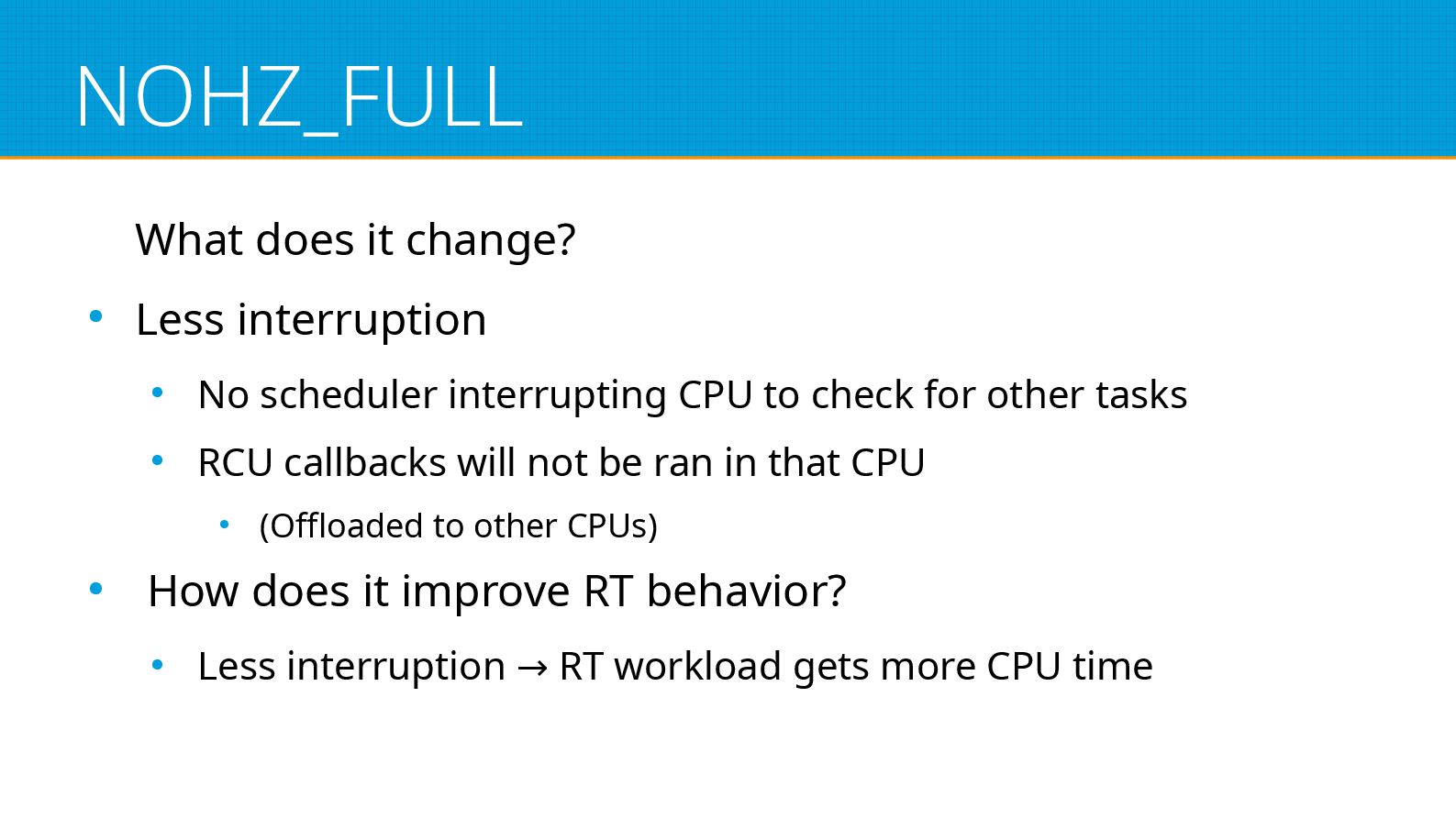
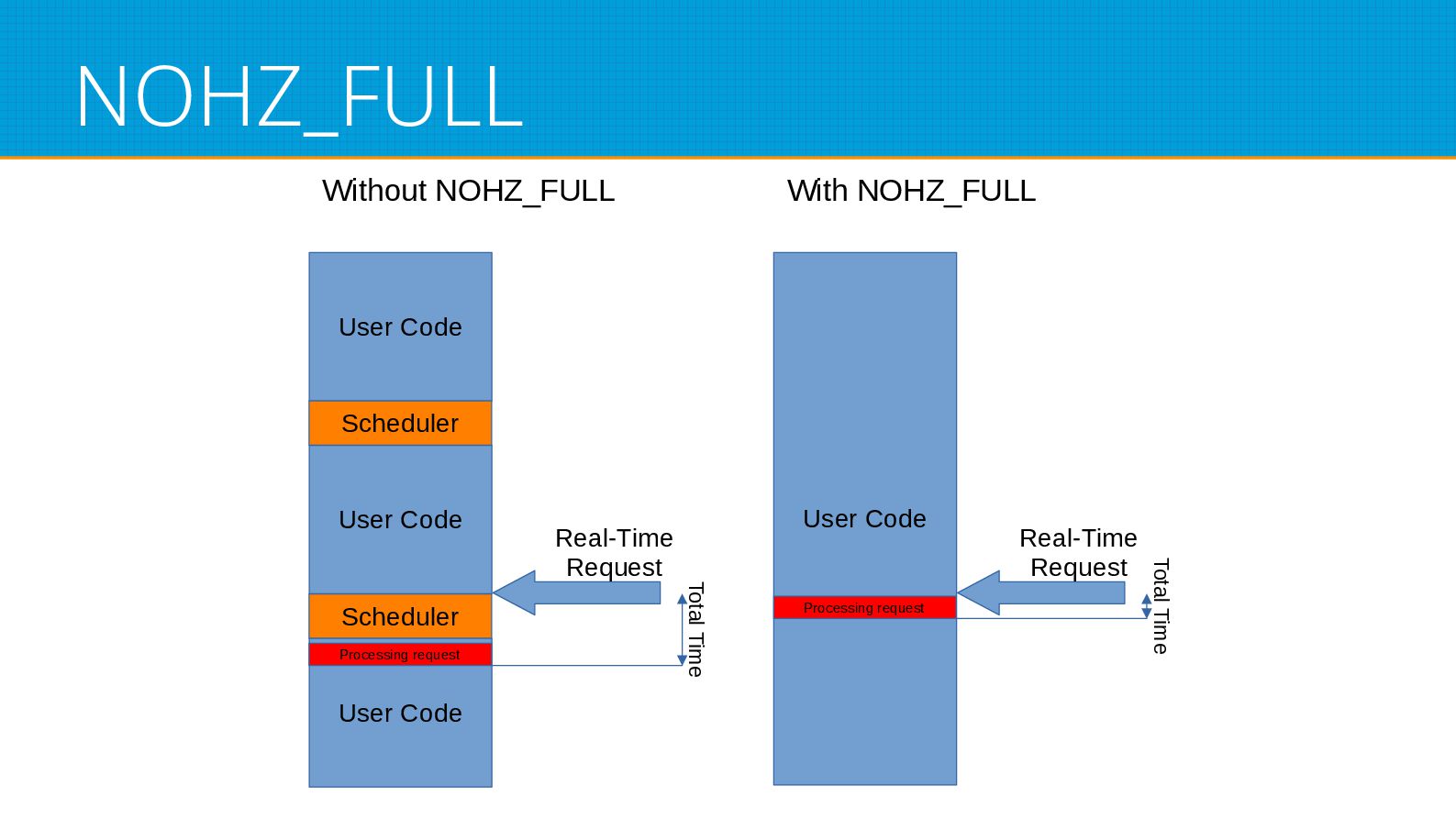
NOHZ_FULL
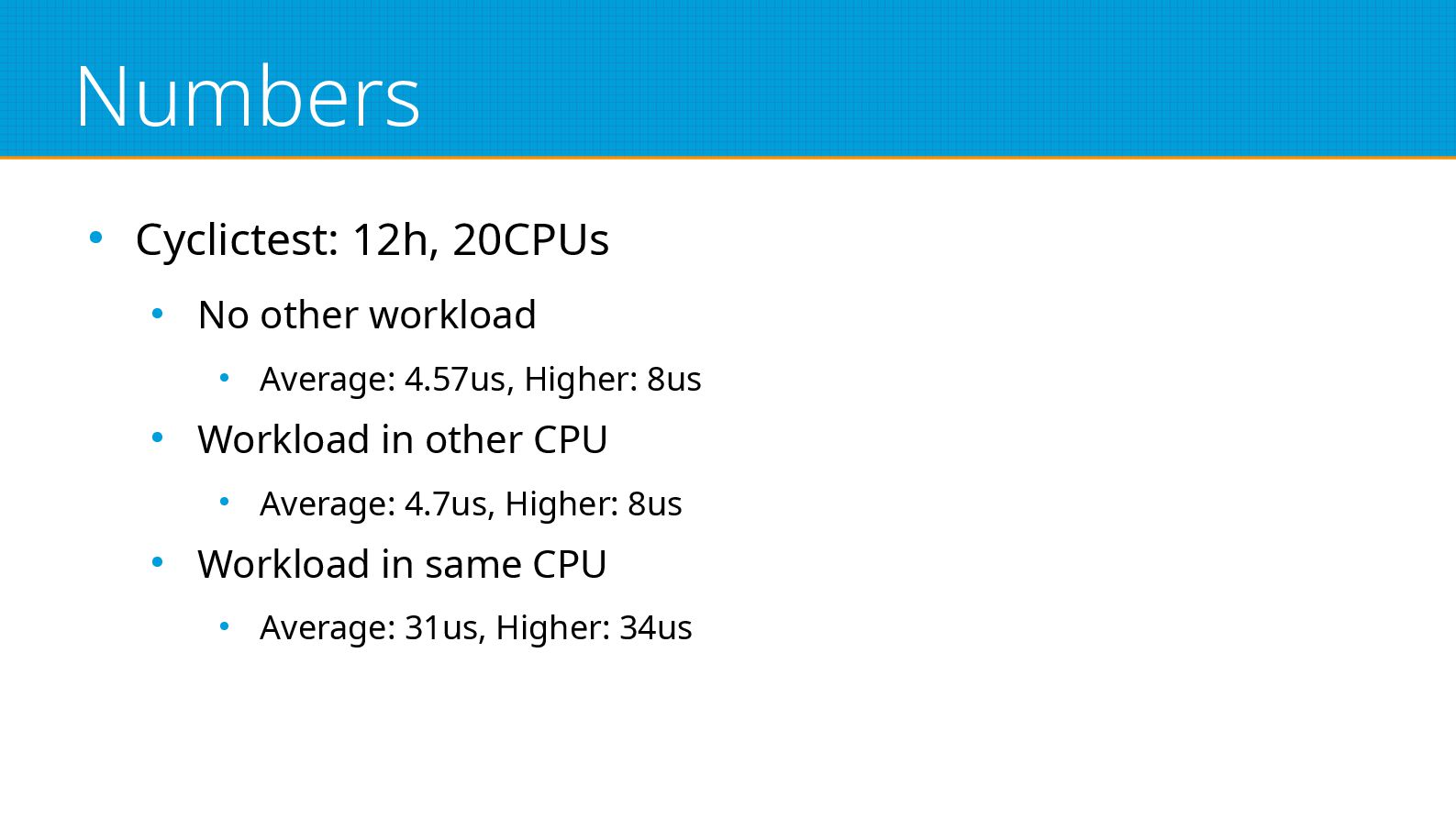
Latency numbers (bare-metal)
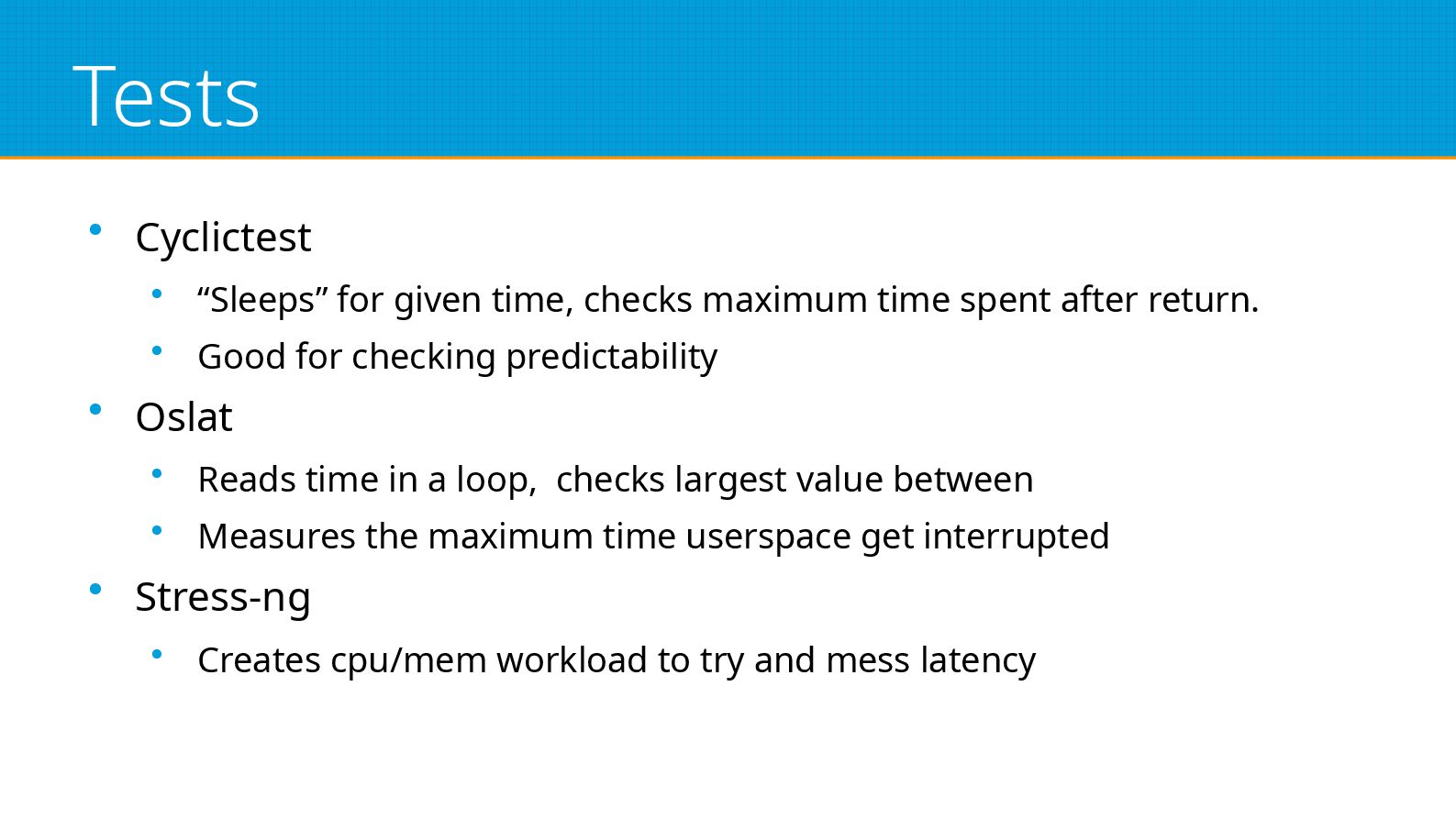
Tests & results
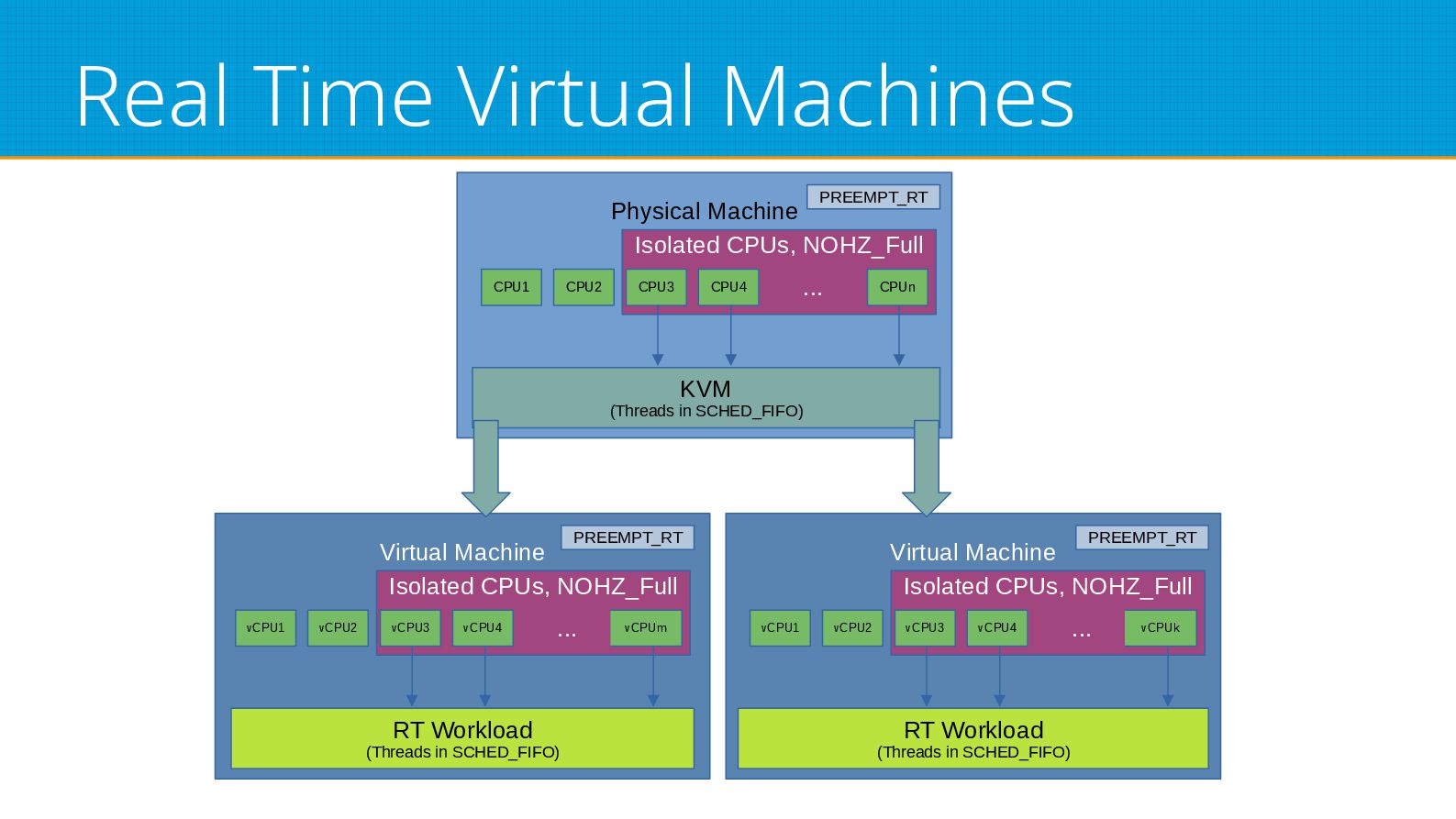
What about Real-Time Virtual Machines?
Motivation & Drawbacks
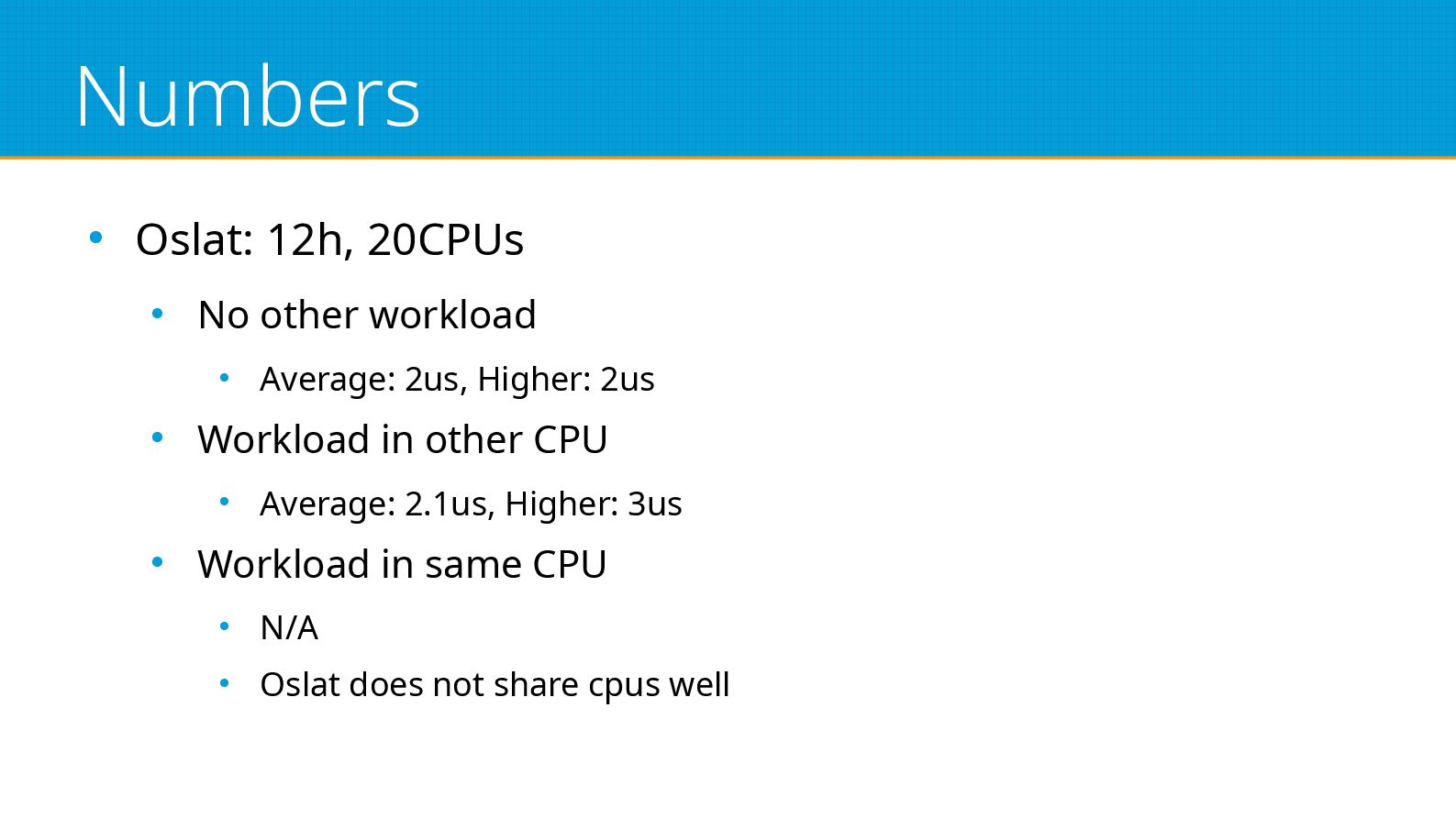
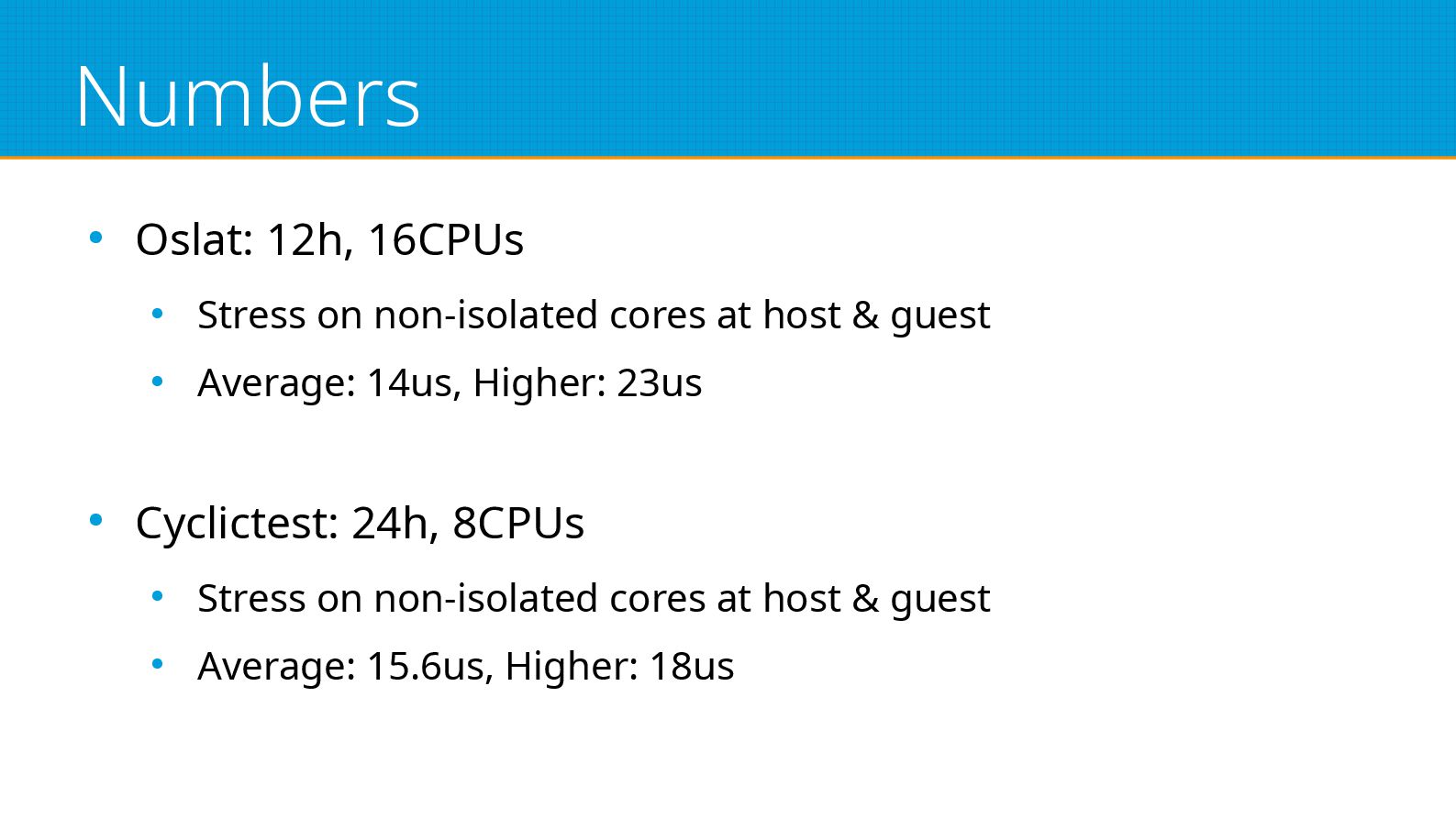
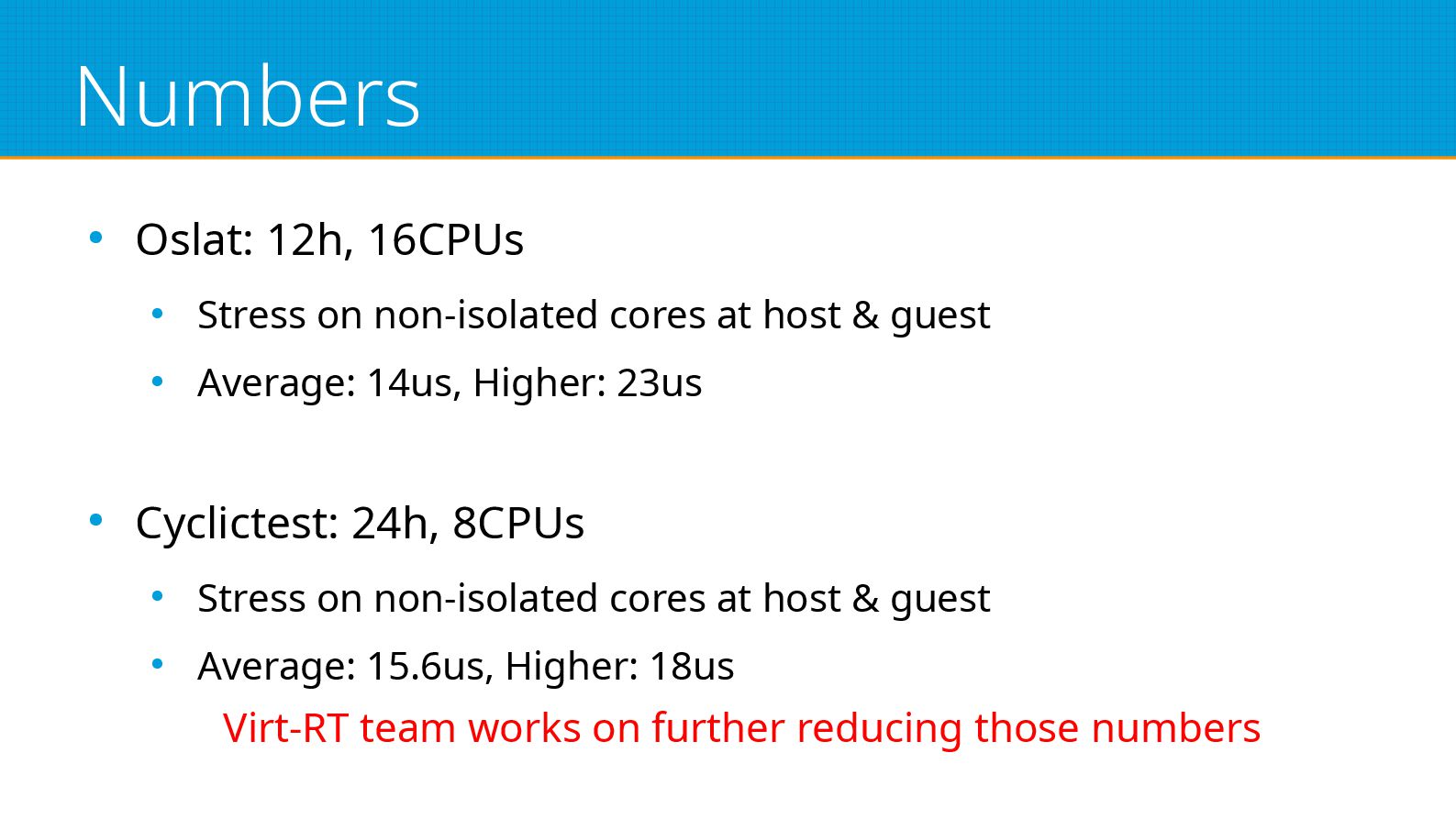
Latency numbers (VMs)
Leonardo BRAS
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![References: [1] "FreeRTOS - Open Source RTOS Kernel for small](https://files.speakerdeck.com/presentations/d50a7eb17bcc4b6e8795612acf3bf219/slide_55.jpg){kind=link}