and Applications. • Computer vision, A modern approach. • Concise Computer Vision, An Introd. into Theo. and Alg. • Advanced Image and Video Processing Using MATLAB. • Hands-On Image Processing with Python. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 7/21
Computer Vision: Foundations and Applications (Stanford University) • Introduction to Computer Vision, CS5670, Spring 2023, Cornell Tech, www.cs.cornell.edu/courses/cs5670/2024sp/ • 16-385 Computer Vision, Spring 2020, Carnegie Mellon, www.cs.cmu.edu/∼16385/ • YouTube lectures • Image and video Processing: From Mars to Hollywood with a Strop at the Hospital, Guillermo Sapiro • Intro to Digital Image Processing, Rich Radke • Various codes • www.numerical-tours.com NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 7/21
Xn×p = Un×n Σn×p V T p×p , • U, V are orthogonal and σ1 ≥ ... ≥ σr are the singular values. • Σ = σ1 ... σr ⃝ or Σ = σ1 ... ⃝ σr . • Columns of V are normalized eigenvectors of XT X. • Columns of U are normalized eigenvectors of XXT . • uj and vj share the same eigenvalue λj , where σj = λj . • Every matrix X of rank r has exactly r nonzero singular values. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 10/21
2: λ, V ← eig(AT A) ▷ Calculate the eigenvalues and eigenvectors of AT A. 3: σ ← √ λ ▷ Calculate the singular values of A. 4: σ ← sort(σ) ▷ Sort the singular values from greatest to least. 5: V ← sort(V ) ▷ Sort the eigenvectors the same way. 6: r ← count(σ ̸= 0) ▷ Count the number of nonzero singular values (the rank of A). 7: σ1 ← σ:r ▷ Keep only the positive singular values. 8: V1 ← V:,:r ▷ Keep only the corresponding eigenvectors. 9: U1 ← AV1/σ1 ▷ Construct U with array broadcasting. 10: return U1, σ1, V T 1 11: end procedure NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 10/21
linear transformation. This transformation can be decomposed in three sub-transformations: 1. Rotation, 2. Re-scaling, 3. Rotation. These three steps correspond to the three matrices U, D, and V. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 10/21
X is X+ = V σ−1 1 ... ⃝ σ−1 p UT • X has linearly independent columns (XT X is invertible): X+ = (XT X)−1XT . In this case, X+X = I. • X has linearly independent rows (matrix XXT is invertible): X+ = XT (XXT )−1. This is a right inverse, as XX+ = I. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 10/21
n matrix of rank r < min{m, n}, store the matrices U1 , Σ1 and V1 instead of A. • Store A: mn values • Store the matrices U1 , Σ1 and V1 : mr + r + nr values. • Example: If A is 100 × 200 and has rank 20 • Store A: 20, 000 values • Store the matrices U1 , Σ1 and V1 : 6, 020 entries. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 10/21
first s < r singular values, plus the corresponding columns of U and V : As = s i=1 σi ui vT i . The resulting matrix As has rank s and is only an approximation to A, since r − s nonzero singular values are neglected. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 10/21
admits a unique decomposition An×p = Qn×p Rp×p where QT Q = I and R is upper triangular. • QR is a useful factorization when n > p. • Full QR decomposition A m×n = Q m×m R 0 m×n = Q1 Q2 R 0 m×n • Reduced QR decomposition A m×n = Q1 m×n R n×n NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 10/21
, / E(c) = ∥Ac − d∥2 • EL: ∂E ∂c = 2(AT A)c − 2AT d = 0. • Normal equation AT A c = AT d. AT A c = AT d =⇒ c = A+d. when A has linearly independent columns and where A+ = (AT A)−1AT NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 13/21
QR ˆ c = (AT A)−1AT d = ((QR)T (QR))−1(QR)T d = (RT QT QR)−1RT QT d = (RT R)−1RT QT d = R−1R−T RT Q−1d = R−1QT d • Algorithm • 1. compute QR factorization A = QR. • 2. matrix-vector product x = QT d • 3. solve Rc = x by back substitution NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 13/21
to ”robustly” estimate parameters of a mathematical model from a set of observed data which contains outliers. • Untill N iterations have occured: • Draw a random sample of S points from the data • Fit the model to that set of S points • Classify data points as outliers or inliers • ReFit the model to inliers while ignoring outliers • Use the best fit from this collection using the fitting error. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 16/21
key-points extracted from each image need to be matched: compute the transf. which minimises a given criterion. • Outliers (incorrect matches) which will corrupt the estimation. • RANSAC: Choose a subset of the points from one image, match these to the other image and compute the transformation which minimises the re-projection error. Repeat using different subsets of key points each time. Then select the best transformation. NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 18/21
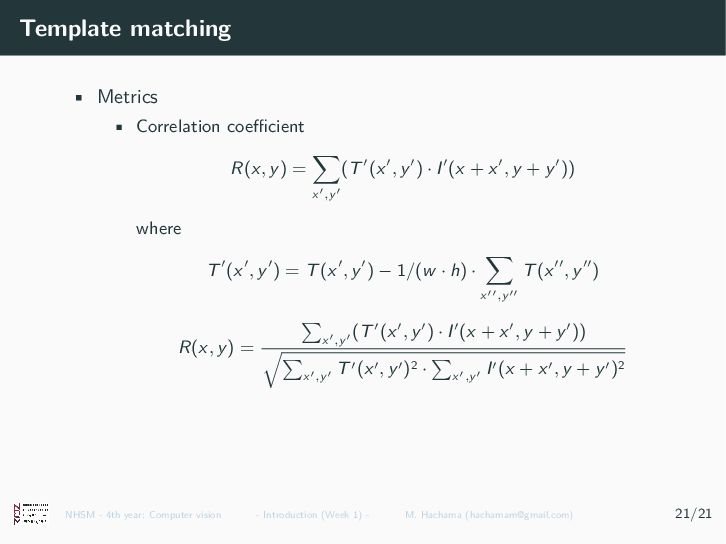
we expect to find a match to the template image • Template image (T): The patch image which will be compared to the template to detect the highest matching area NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 21/21
by sliding it • Moving the patch one pixel at a time. • At each location, a similarity metric is calculated NHSM - 4th year: Computer vision - Introduction (Week 1) - M. Hachama ([email protected]) 21/21
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}