Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
【令和最新版】ロボットシミュレータ Genesis x ROS 2で始める快適AIロボット開発
Search
Masaya Kataoka
December 27, 2024
Technology
3.1k
2
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
【令和最新版】ロボットシミュレータ Genesis x ROS 2で始める快適AIロボット開発
Masaya Kataoka
December 27, 2024
More Decks by Masaya Kataoka
See All by Masaya Kataoka
CLIPでrosbagの データを検索してみる話
hakuturu583
0
230
AMBER、rosbag と pytorchで はじめるお手軽マルチ モーダルロボット開発
hakuturu583
0
340
Other Decks in Technology
See All in Technology
脱金融のフューチャー・デザイン / Future Design Beyond Finance
ks91
PRO
0
160
DMM.com 購入改善推進チーム におけるCodeRabbitを用いた レビューフロー改善の一例
ysknsid25
2
670
発表と総括 / Presentations and Summary
ks91
PRO
0
140
オブザーバビリティ、本当に活用できてる? 〜API連携×生成AIで成熟度を自動評価〜
dmmsre
1
3.6k
穢れた技術選定について
watany
17
5.6k
Compose 新機能総まとめ / What's New in Jetpack Compose
yanzm
0
320
Making sense of Google’s agentic dev tools
glaforge
1
280
実践!既存 Project への AI-Driven Development 適用〜 一ヶ月で Project 唯一のフロントエンドエンジニアを作り出せ〜
lycorptech_jp
PRO
0
240
ソニー銀行におけるビジネスアジリティ向上のためのクラウドシフト戦略
srenext
0
830
非定型なドキュメントを効率よくリファクタする 〜えぇ!?仕様書27本の移行が1日で終わったって!?〜
subroh0508
2
560
“それは自分の仕事じゃない"を 越えて行け
yuukiyo
1
480
AIと共生する開発者プラットフォーム:バクラクのモノレポ×マイクロサービス基盤
sakajunquality
2
3.9k
Featured
See All Featured
Ruling the World: When Life Gets Gamed
codingconduct
0
280
Jess Joyce - The Pitfalls of Following Frameworks
techseoconnect
PRO
1
190
Leo the Paperboy
mayatellez
8
1.9k
How to audit for AI Accessibility on your Front & Back End
davetheseo
0
470
Fireside Chat
paigeccino
42
4k
HTML-Aware ERB: The Path to Reactive Rendering @ RubyCon 2026, Rimini, Italy
marcoroth
2
340
No one is an island. Learnings from fostering a developers community.
thoeni
21
3.8k
What's in a price? How to price your products and services
michaelherold
247
13k
Balancing Empowerment & Direction
lara
6
1.2k
Beyond borders and beyond the search box: How to win the global "messy middle" with AI-driven SEO
davidcarrasco
3
180
Fashionably flexible responsive web design (full day workshop)
malarkey
408
67k
Are puppies a ranking factor?
jonoalderson
1
3.7k
Transcript
【令和最新版】ロボットシミュレータ Genesis x ROS 2で始める快適 AIロボット開発 Team re-boot Masaya Kataoka
人生是即RoboCup • 学生時代は阪大のJoitech-SPLというチームのリーダーをしていました • ラズパイ以下のCPUでヒューマノイドでサッカーをやるとかいう魔境 • フルスクラッチで自作、予選敗退したけど圧倒的満足 • いい加減ハード作らせろ...これでは2050年までに人間に勝てないぞ!! ▶というわけで会社に世界大会優勝者がいたのでRobocupチームを立ち上げました
最近機械学習大変隆盛 • MPC x 油圧で頑張っていたBoston Dynamicsも強化学習 x 電動に • 爆速ロボットCassieは以前からlearning
base
我欲賢ROS Robot • ロボカップにおいて難しいのは行動計画 • マルチモーダルな情報処理とマルチタスクなプランニングが必要 • 複雑なモーションを手作業で作るのは無理、特に仕事してると無理 ▶ 面倒なことはAIにやらせよう
面倒なこと はAIに やらせよう Motion CLIPの特徴量とかで 条件付すればなんか それっぽい方策得られるんじゃ ね?知らんけど 右手はもうちょい下げたほうが特 徴量的にそれっぽい
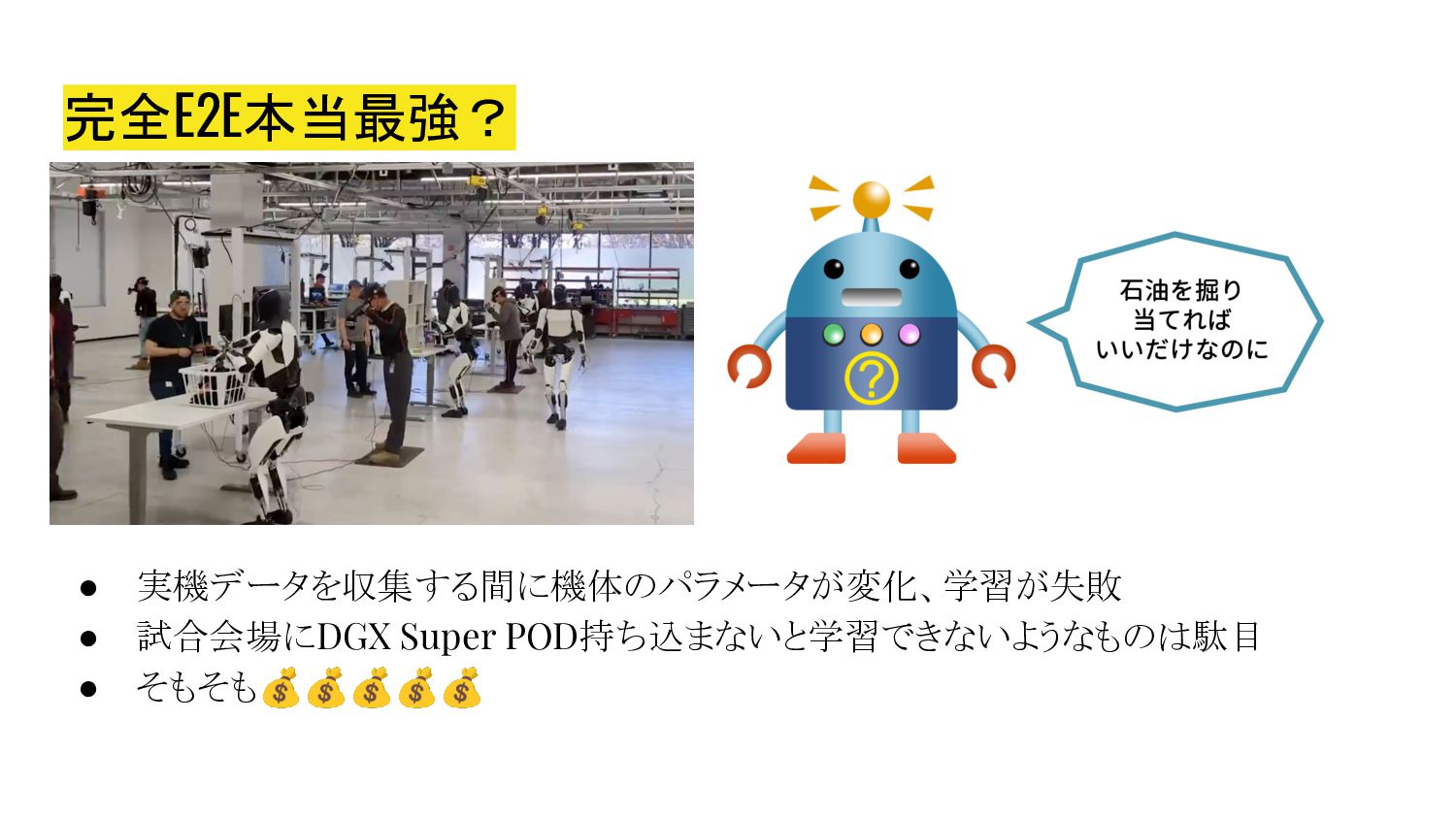
完全E2E本当最強? • 実機データを収集する間に機体のパラメータが変化、学習が失敗 • 試合会場にDGX Super POD持ち込まないと学習できないようなものは駄目 • そもそも💰💰💰💰💰
我欲混合構成 • learning baseな要素とそうでなくていい要素がある • ハードウェア駆動や前処理、同期、座標変換などを学習でやる意味がない • こういった決定的な要素に対してROSはとても強い • でも、学習時にはROSは通信遅延やネットワークの設定などで邪魔
▶ 適切に役割分担を行い最適なロボットシステムを実現 VLMで画像処理するにしても、 歪み補正までディープでやる意 味ないよ
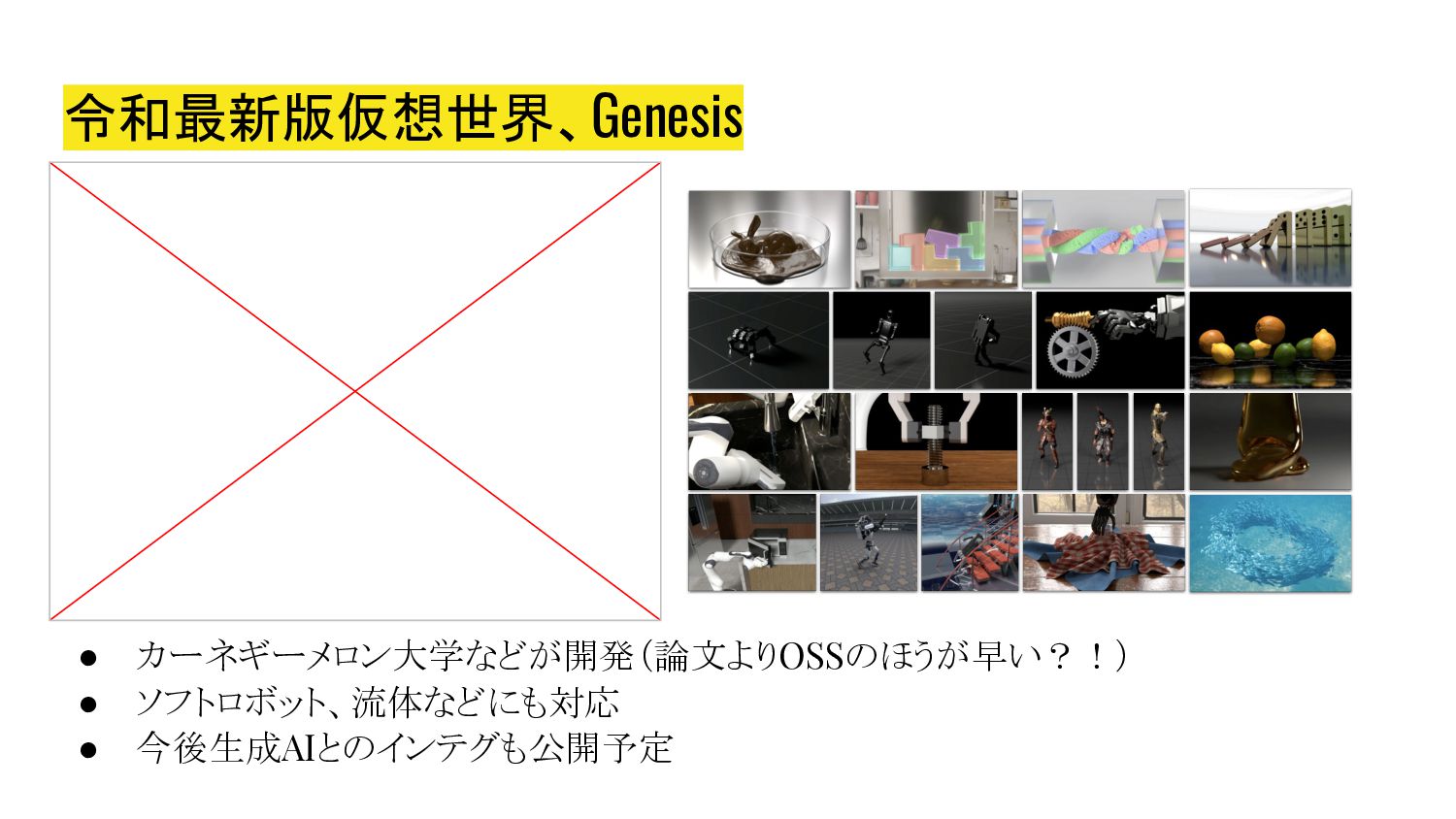
令和最新版仮想世界、Genesis • カーネギーメロン大学などが開発(論文よりOSSのほうが早い?!) • ソフトロボット、流体などにも対応 • 今後生成AIとのインテグも公開予定
genesis_ros • URDF変換、読み込み • リンクの位置情報を/tfトピックとしてmcapで出力 • amber連携によるpytorchへのmcapデータ入力 • セットアップはgit cloneしてpoetry
installするだけ!
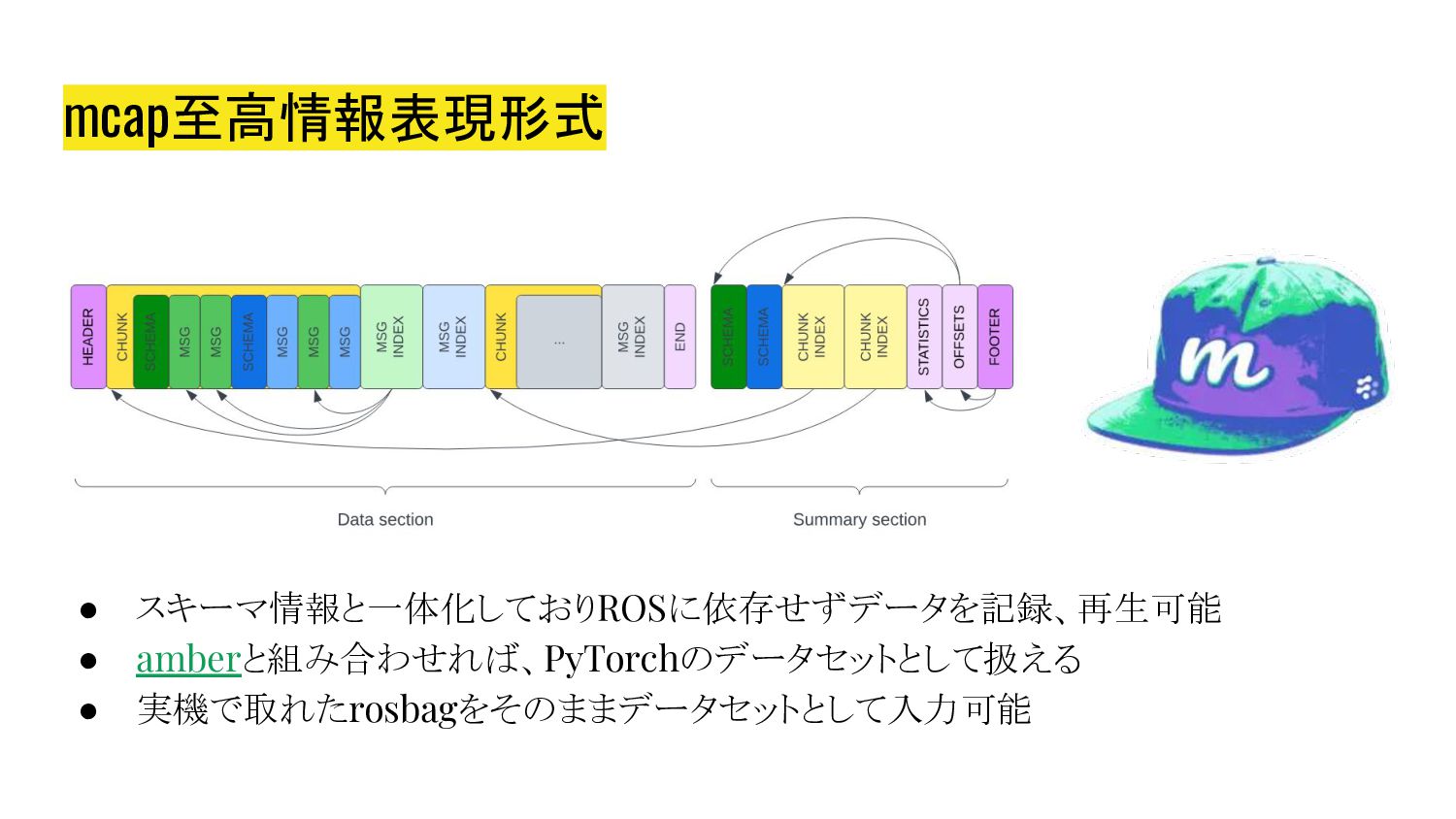
mcap至高情報表現形式 • スキーマ情報と一体化しておりROSに依存せずデータを記録、再生可能 • amberと組み合わせれば、PyTorchのデータセットとして扱える • 実機で取れたrosbagをそのままデータセットとして入力可能
論よりRUN
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}