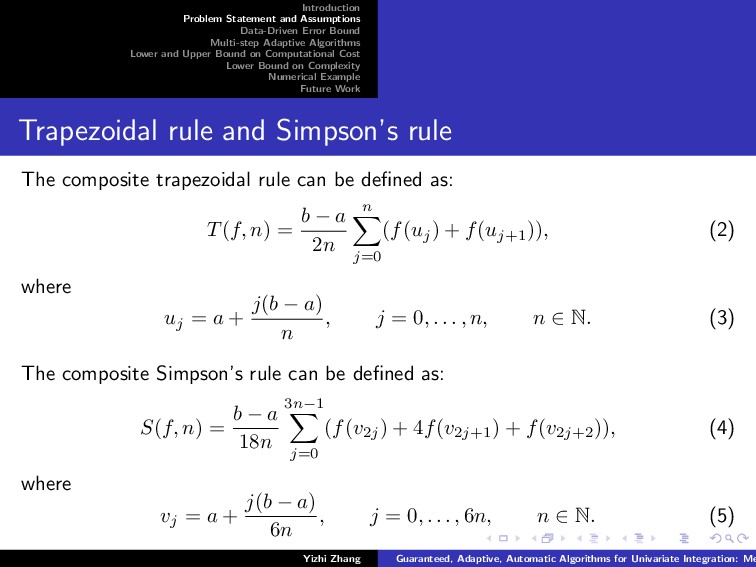
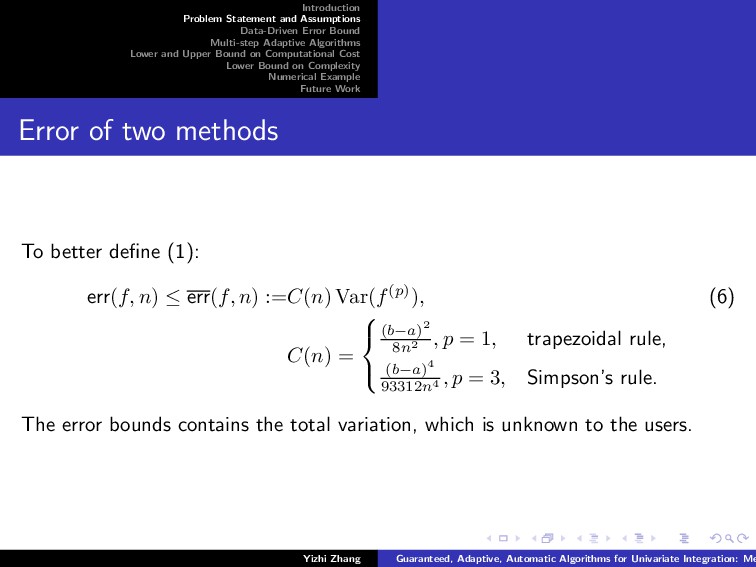
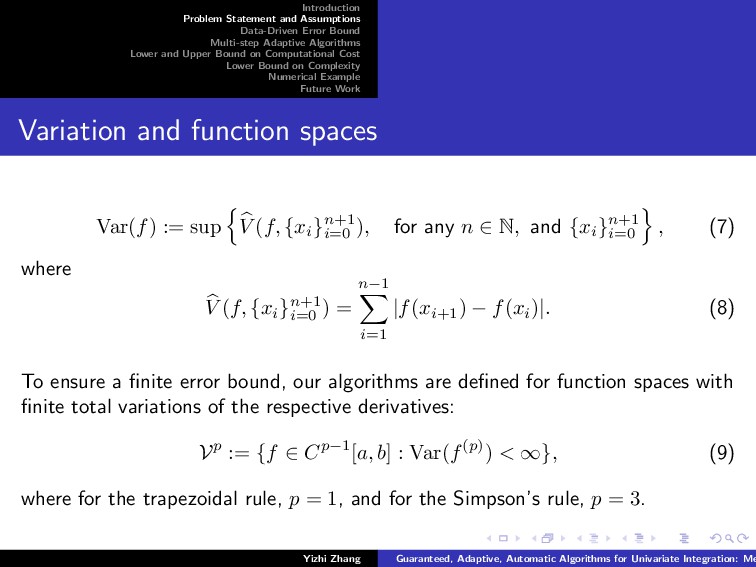
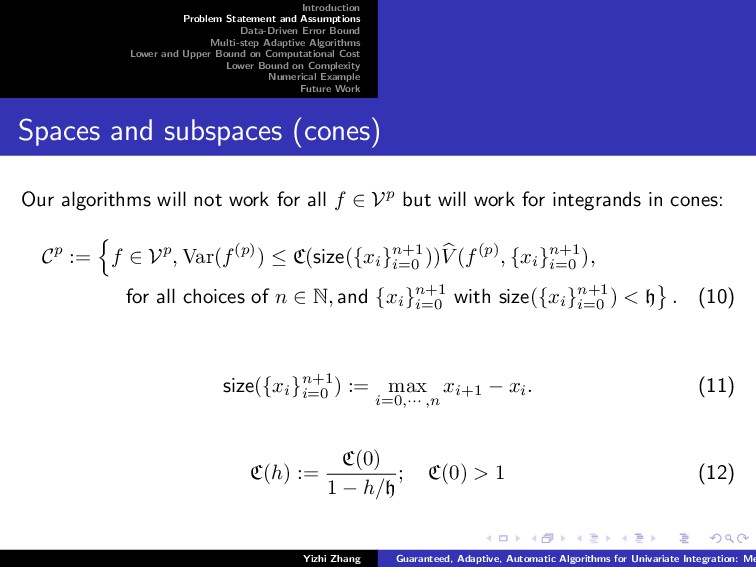
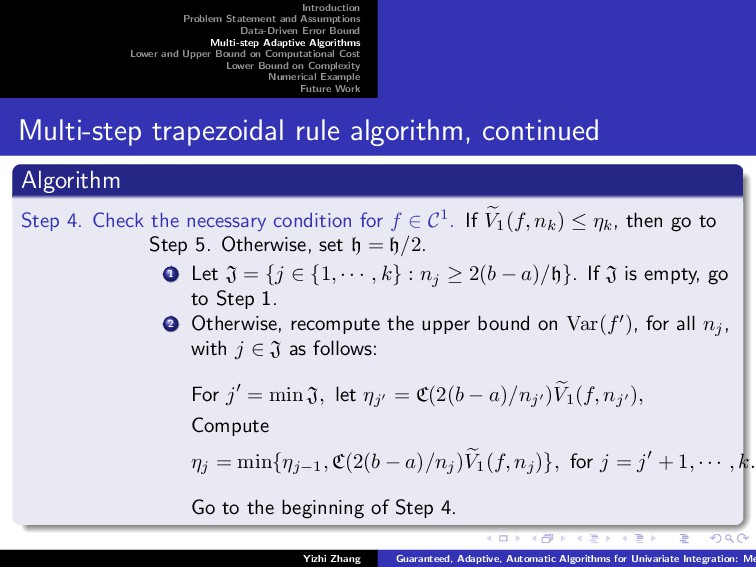
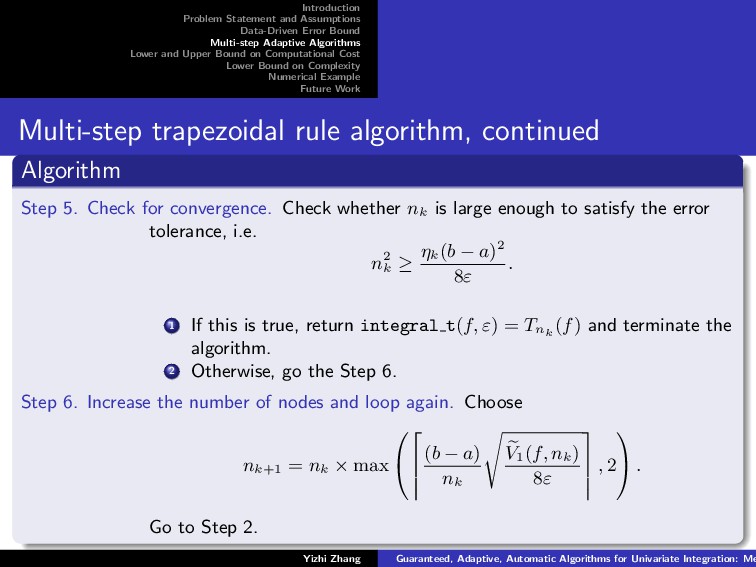
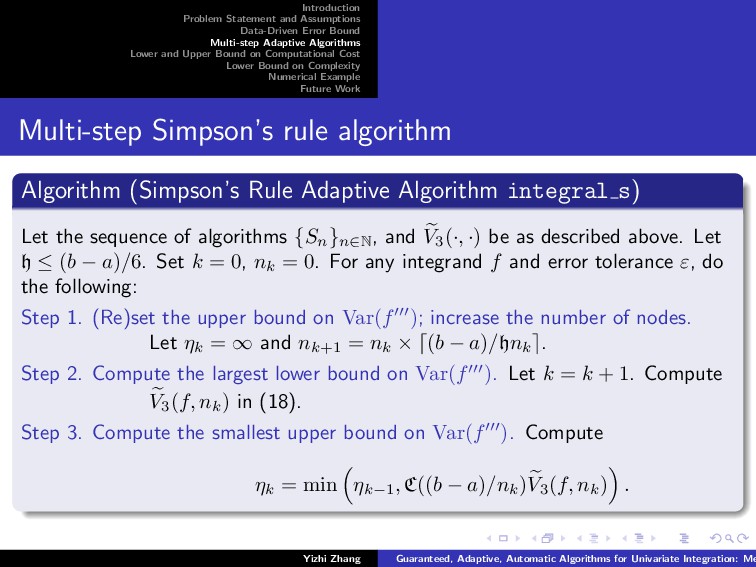
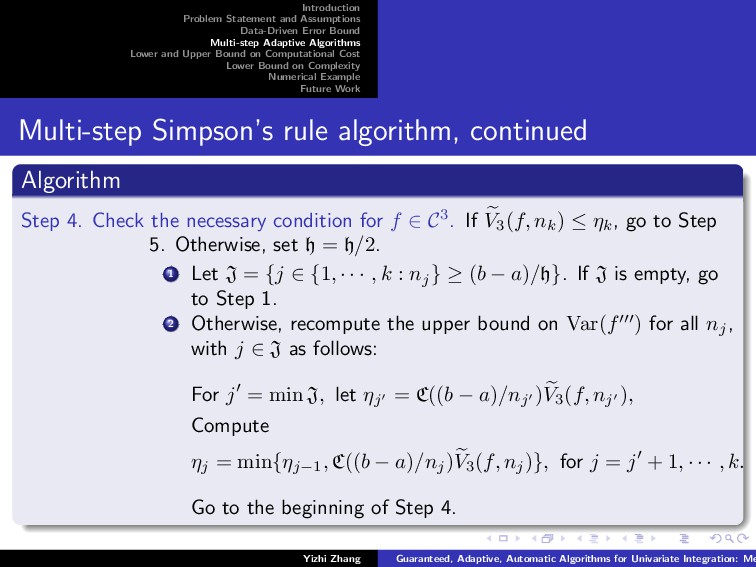
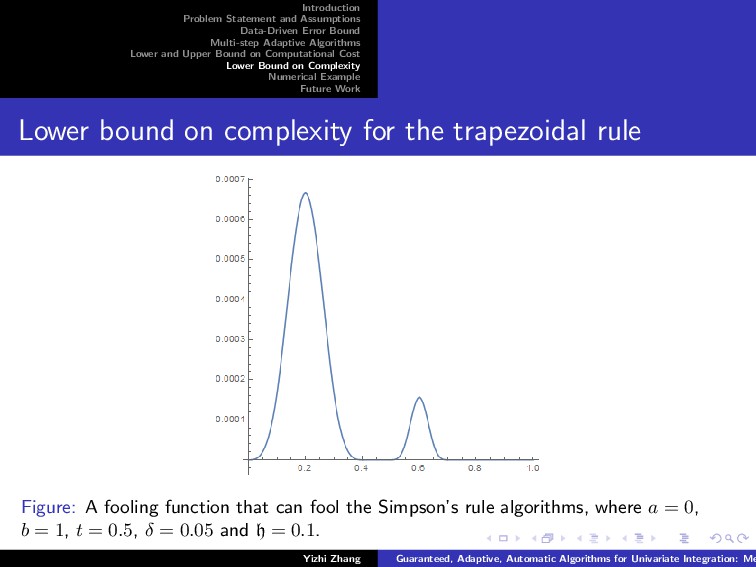
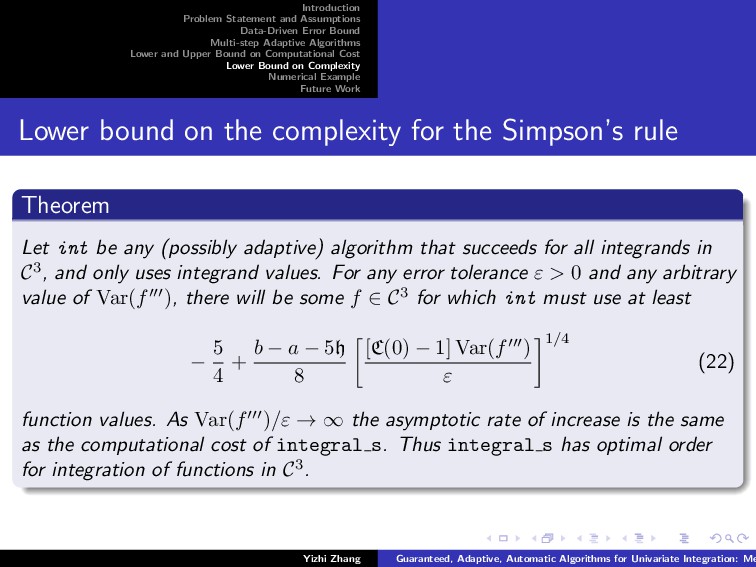
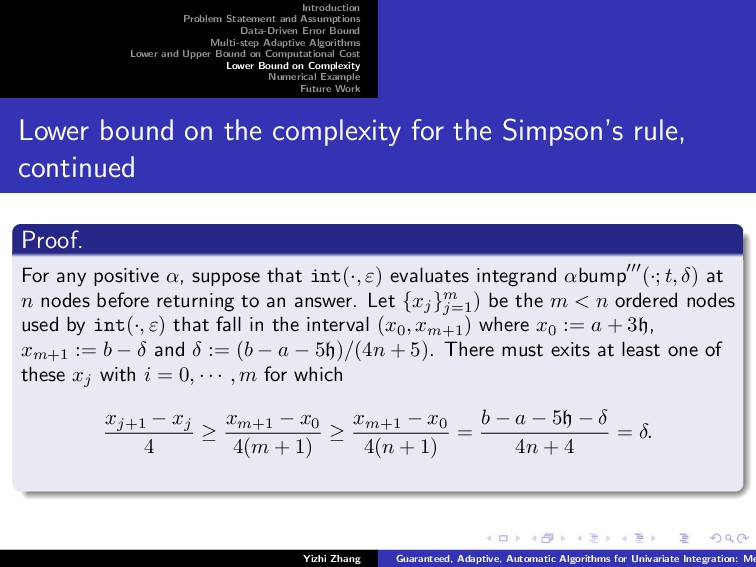
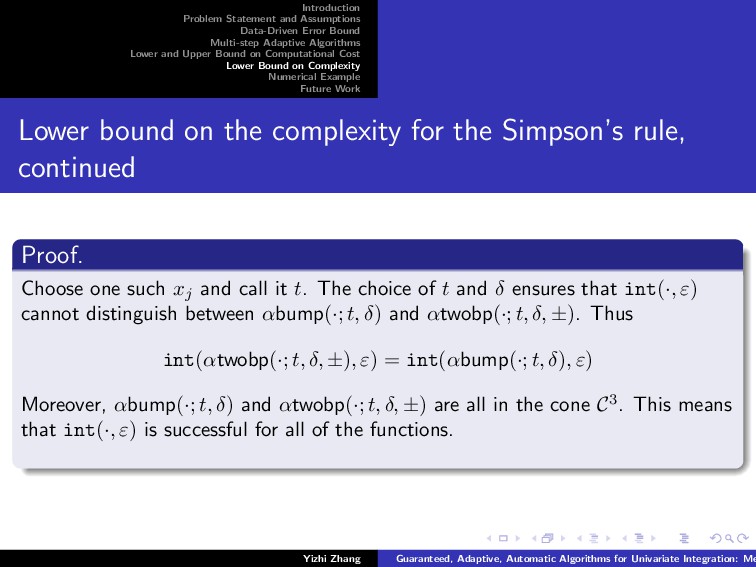
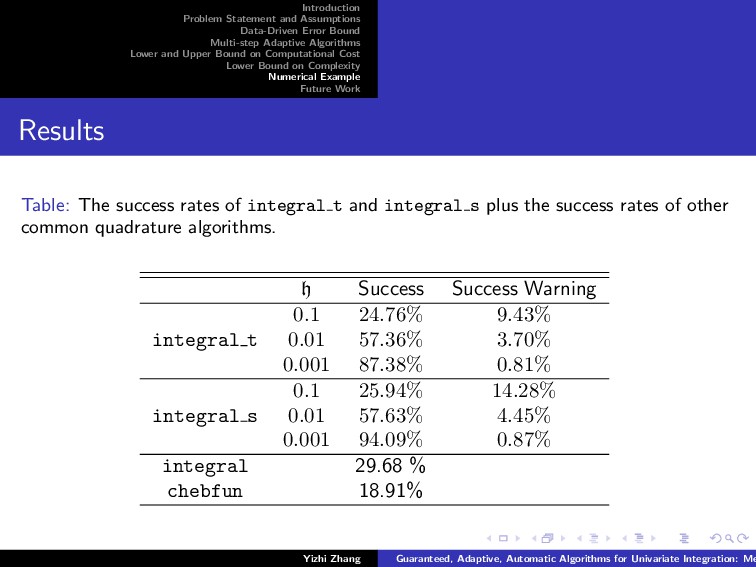
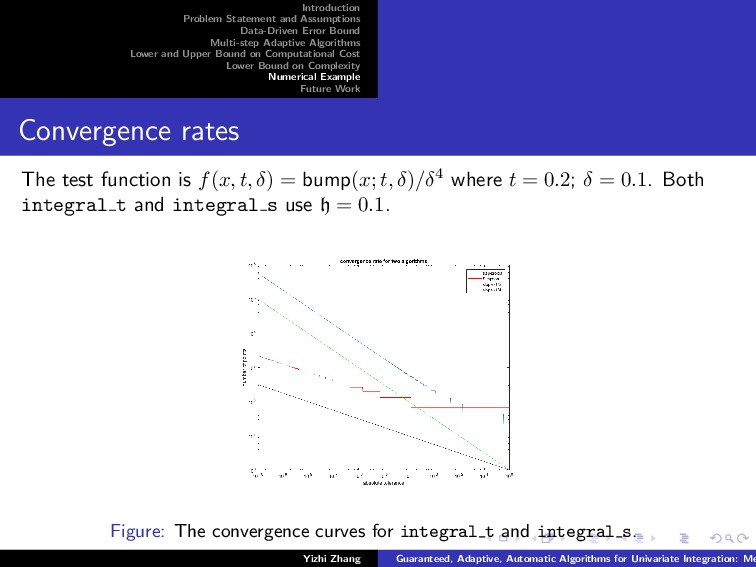
Slides presented Yizhi Zhang's PhD oral defense exam for his work on his PhD thesis. This thesis investigates how to solve univariate integration problems using numerical methods, including the trapezoidal rule and the Simpson's rule. Most existing guaranteed algorithms are not adaptive and require too much a priori information. Most existing adaptive algorithms do not have valid justification for their results. The goal is to create adaptive algorithms utilizing the two above-mentioned methods with guarantees. The classes of integrands studied in this thesis are cones. The algorithms are analytically proved to be a success if the integrand lies in the cone. The algorithms are adaptive and automatically adjust the computational costs based on the integrand values. The lower and upper bounds on the computational costs for both algorithms are derived. The lower bounds on the complexity of the problems are derived as well. By comparing the upper bounds on the computational cost and the lower bounds on the complexity, our algorithms are shown to be asymptotically optimal. Numerical experiments are implemented.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}