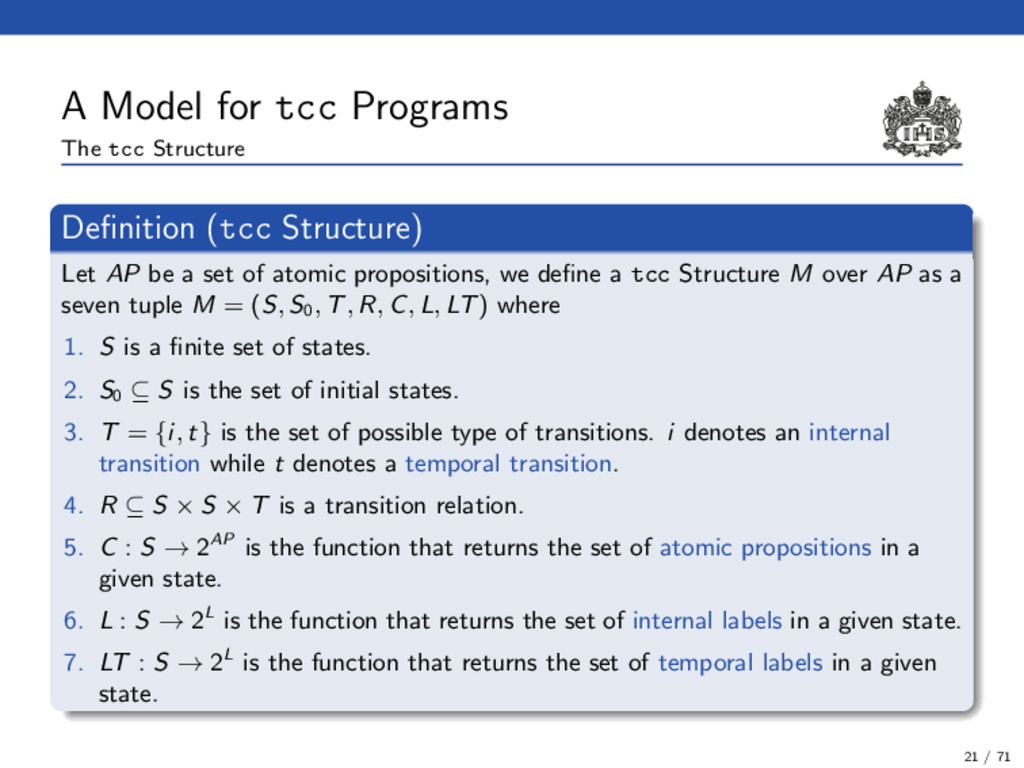
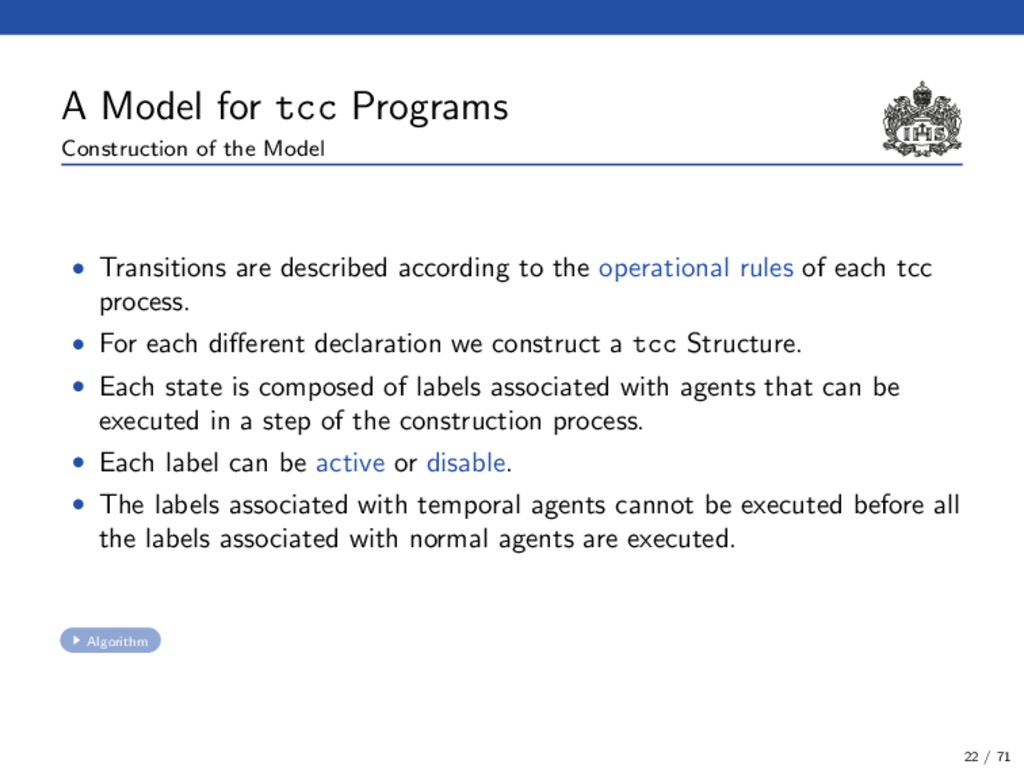
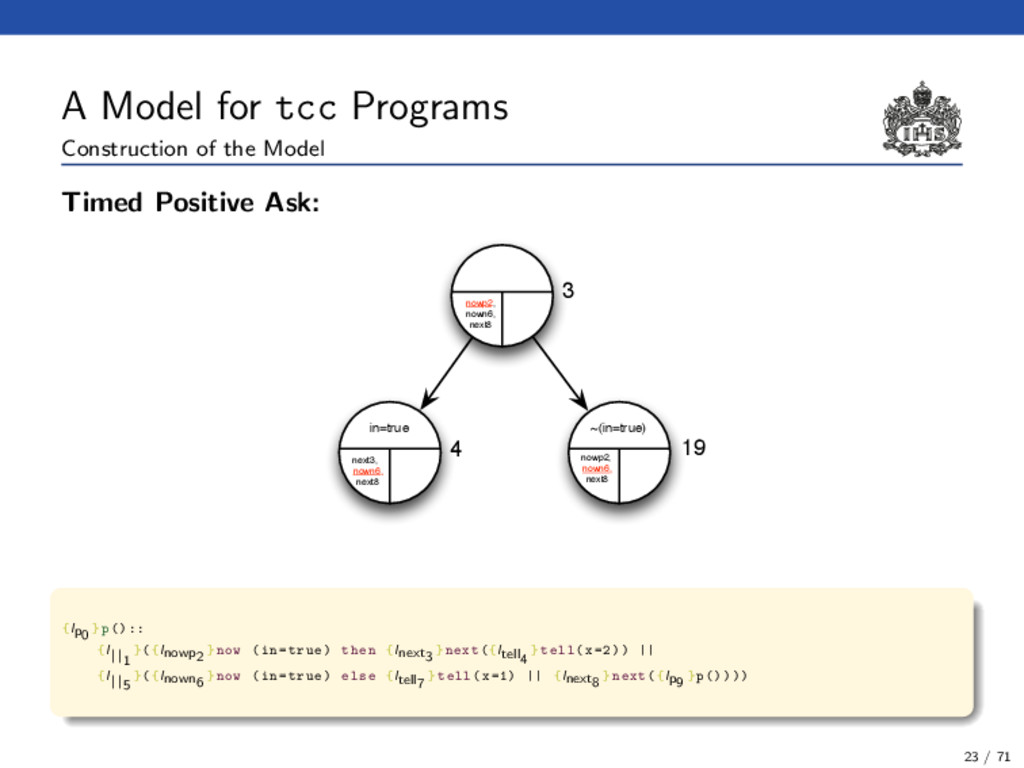
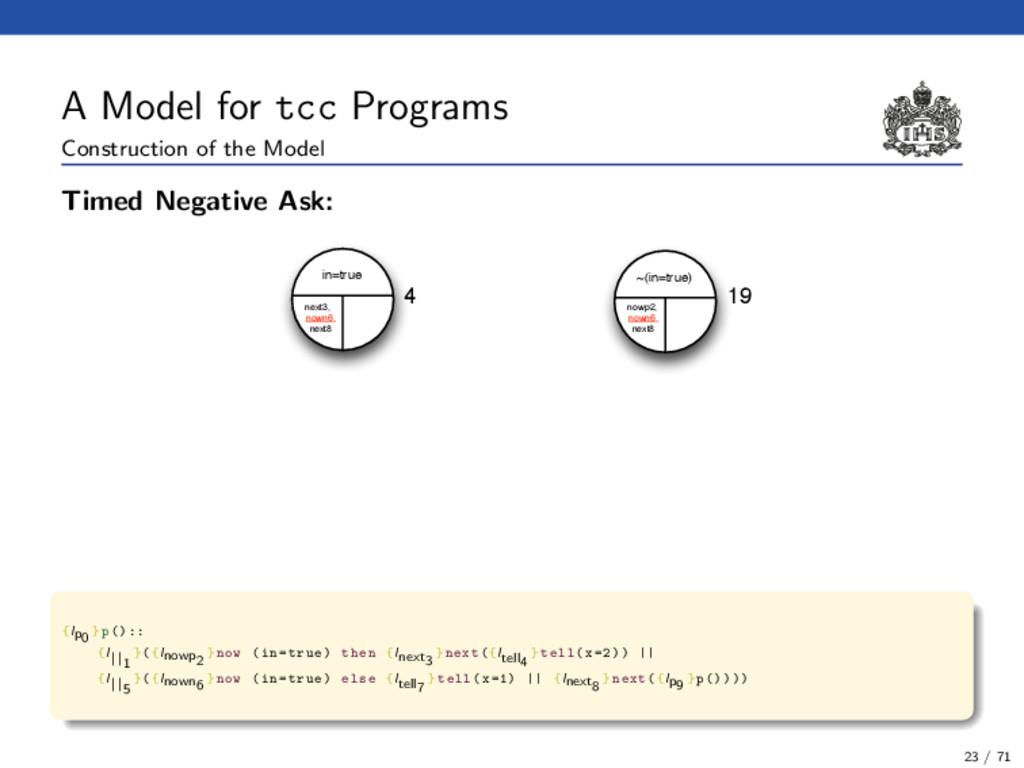
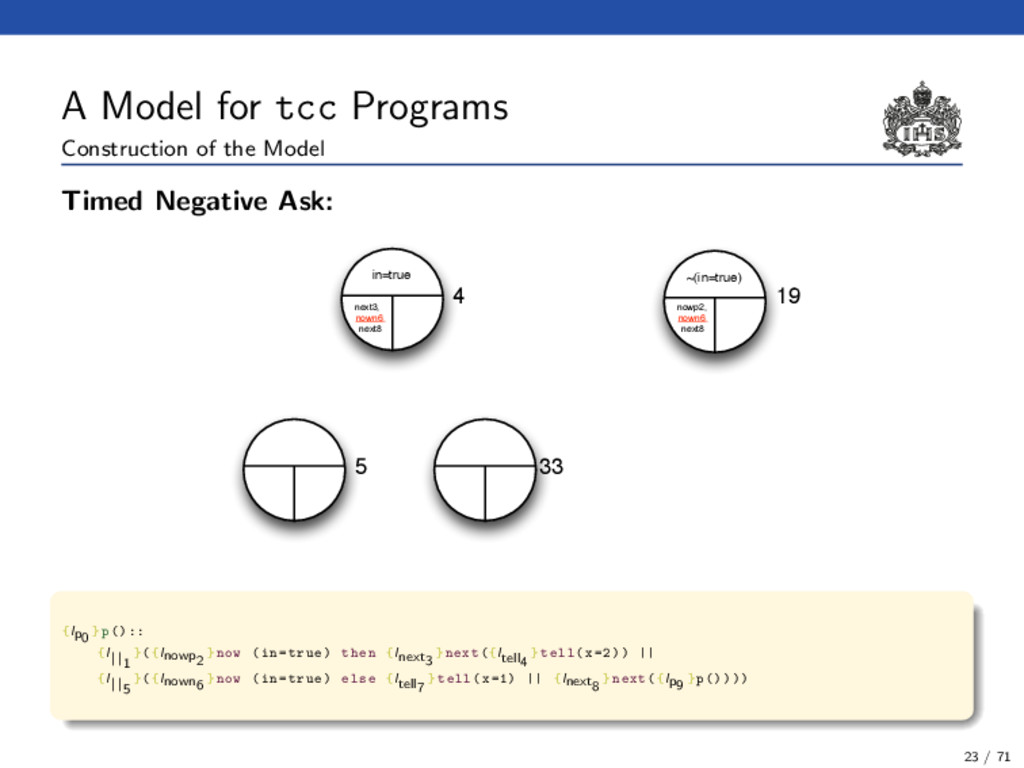
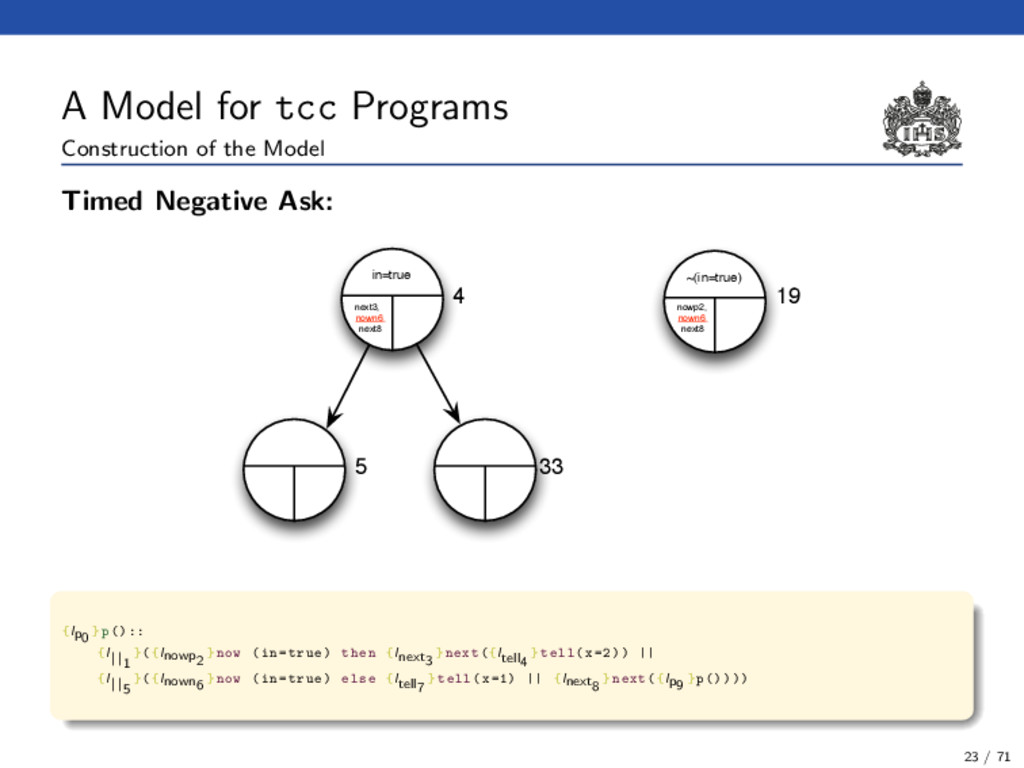
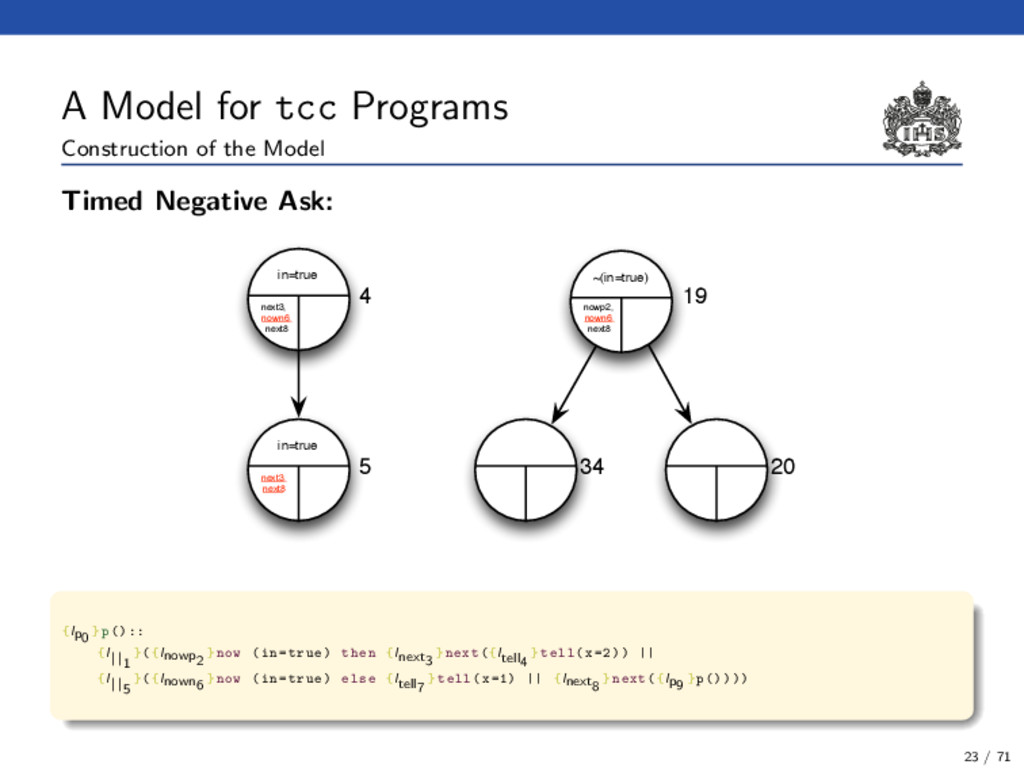
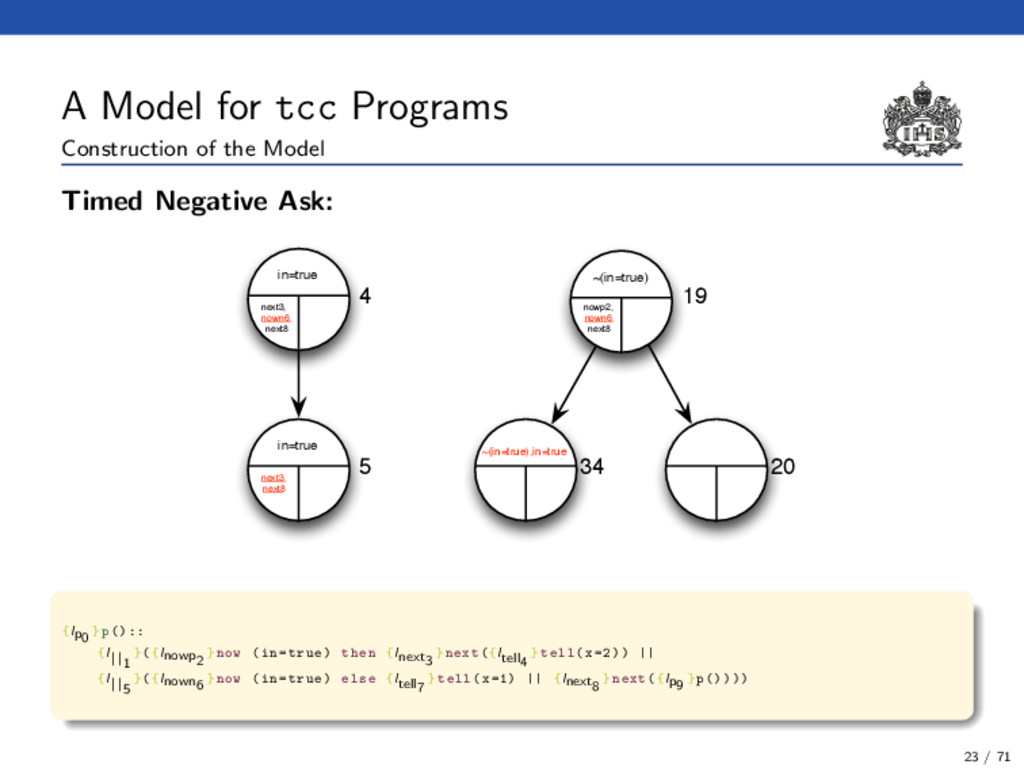
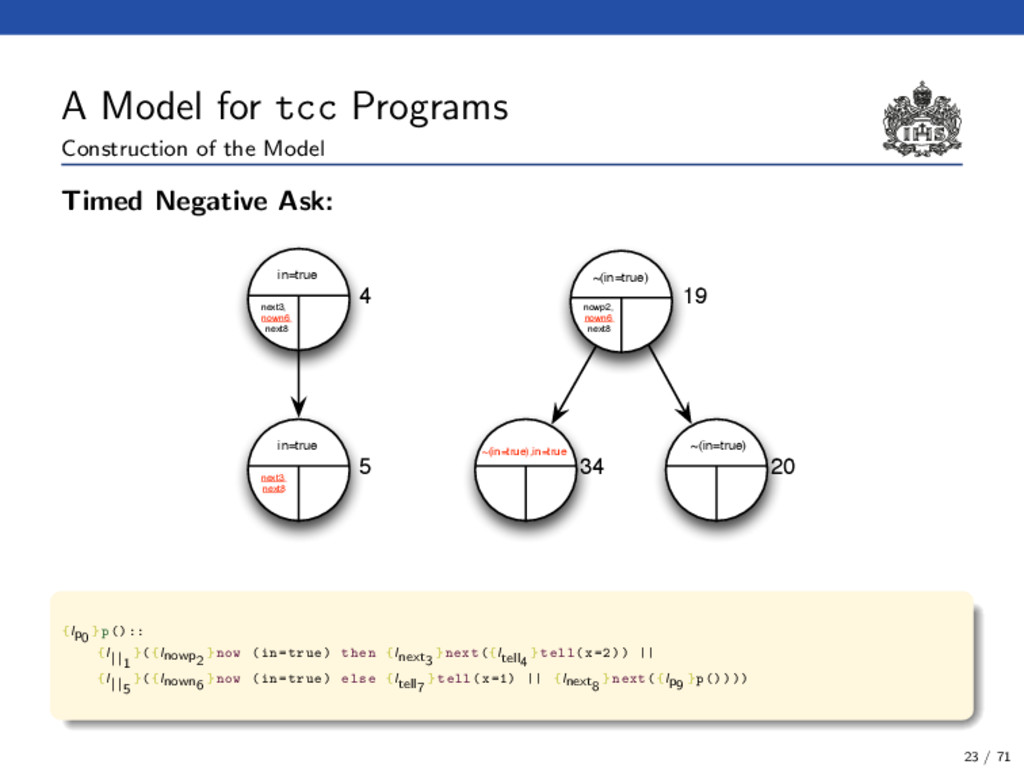
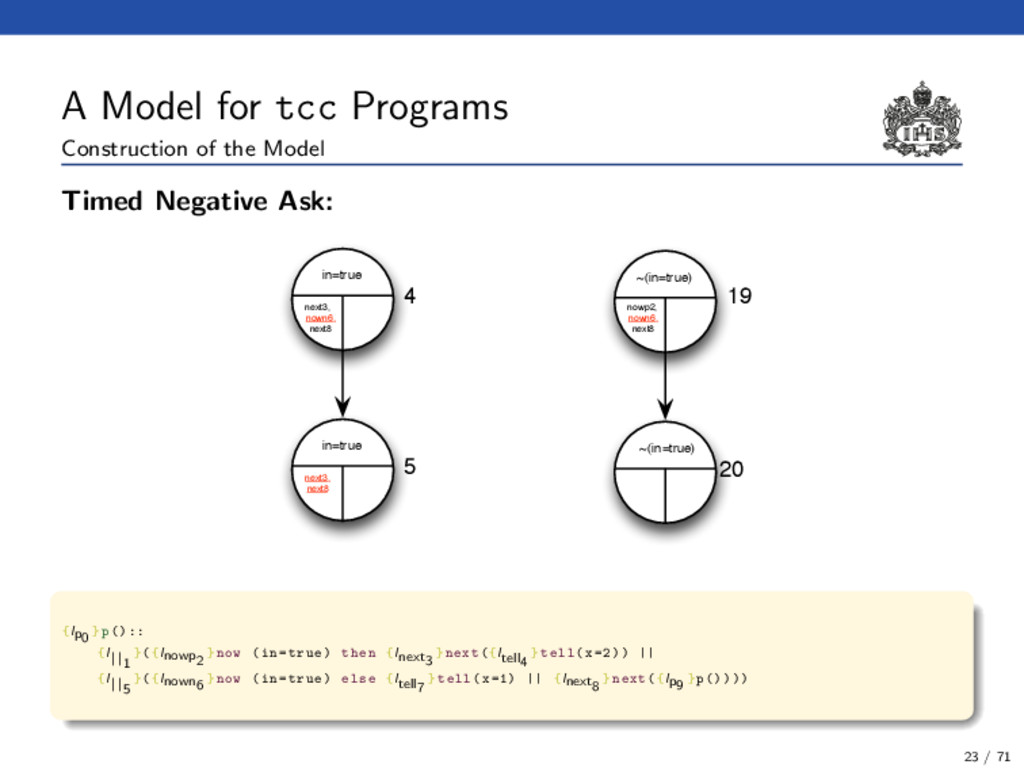
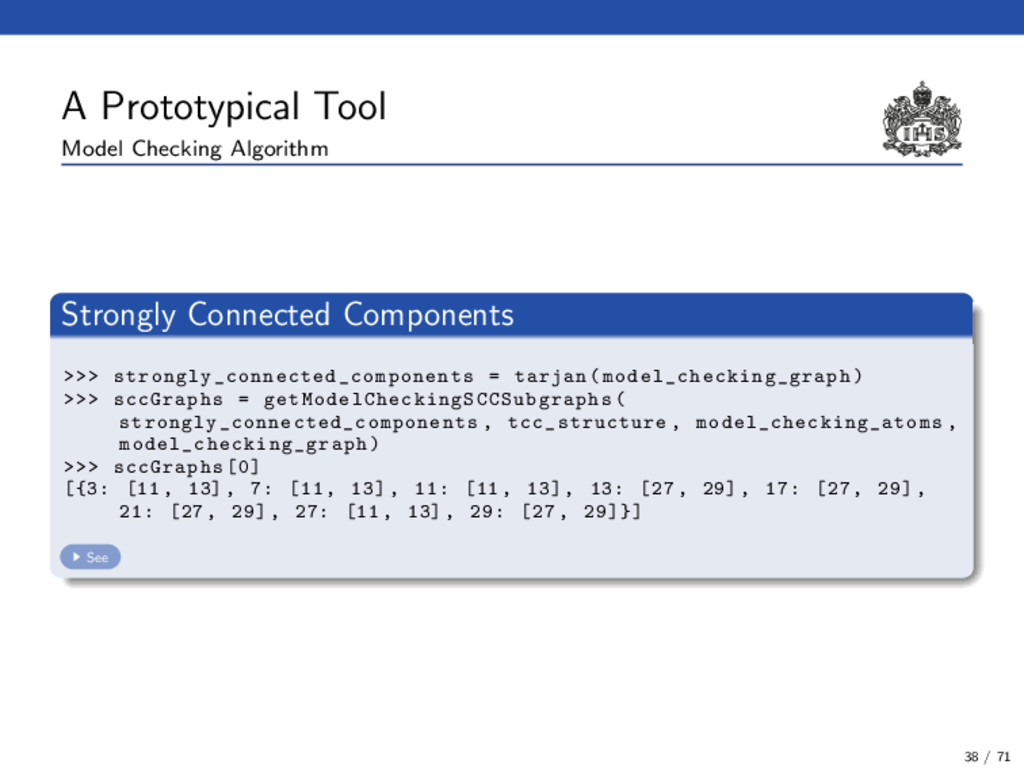
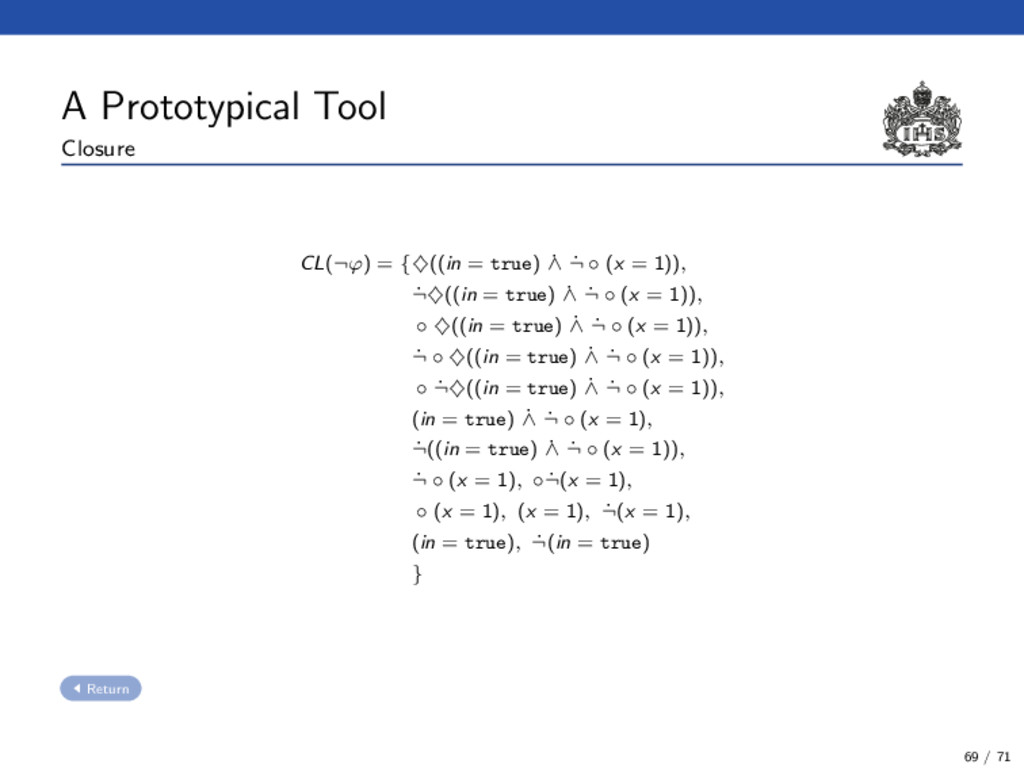
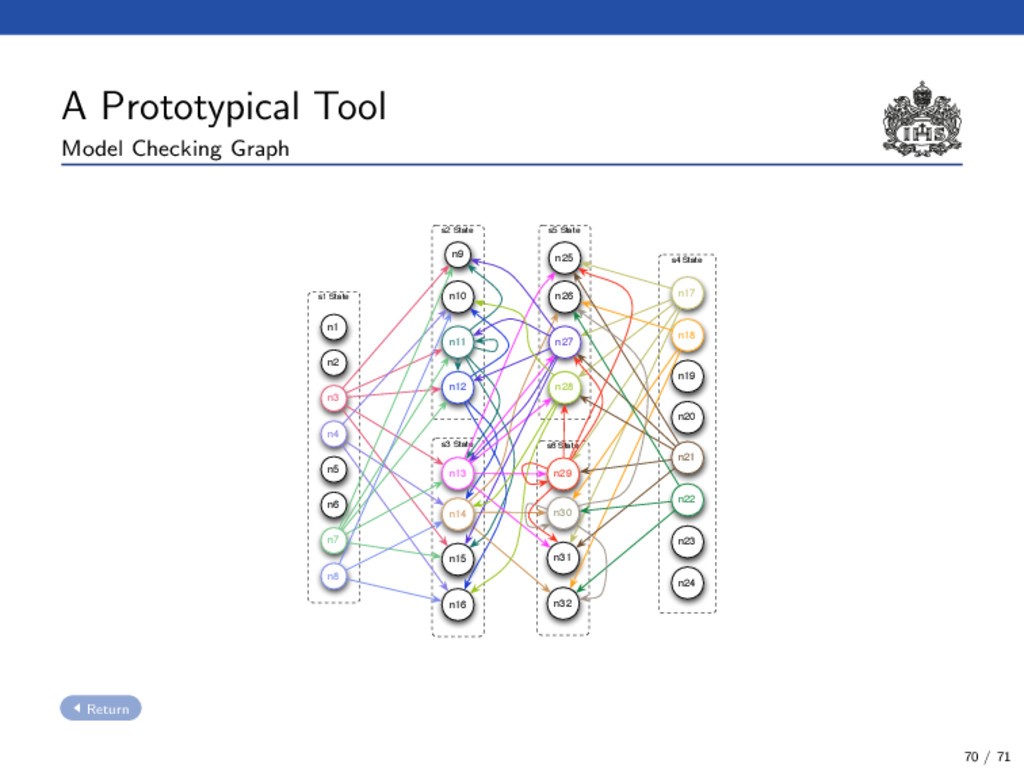
model_checking_graph = getModelCheckingGraph (tcc_structure , model_checking_atoms ) >>> model_checking_graph {1: [], 2: [], 3: [9, 11, 12, 13, 15], 4: [10, 16, 14], 5: [], 6: [], 7: [9, 11, 12, 13, 15], 8: [10, 16, 14], 9: [], 10: [], 11: [9, 11, 12, 13, 15], 12: [10, 16, 14], 13: [25, 27, 28, 29, 31], 14: [26, 32, 30], 15: [], 16: [], 17: [25, 27, 28, 29, 31], 18: [26, 32, 30], 19: [], 20: [], 21: [25, 27, 28, 29, 31], 22: [26, 32, 30], 23: [], 24: [], 25: [], 26: [], 27: [9, 11, 12, 13, 15], 28: [10, 16, 14], 29: [25, 27, 28, 29, 31], 30: [26, 32, 30], 31: [], 32: []} See 37 / 71
{kind=link}
{kind=link}
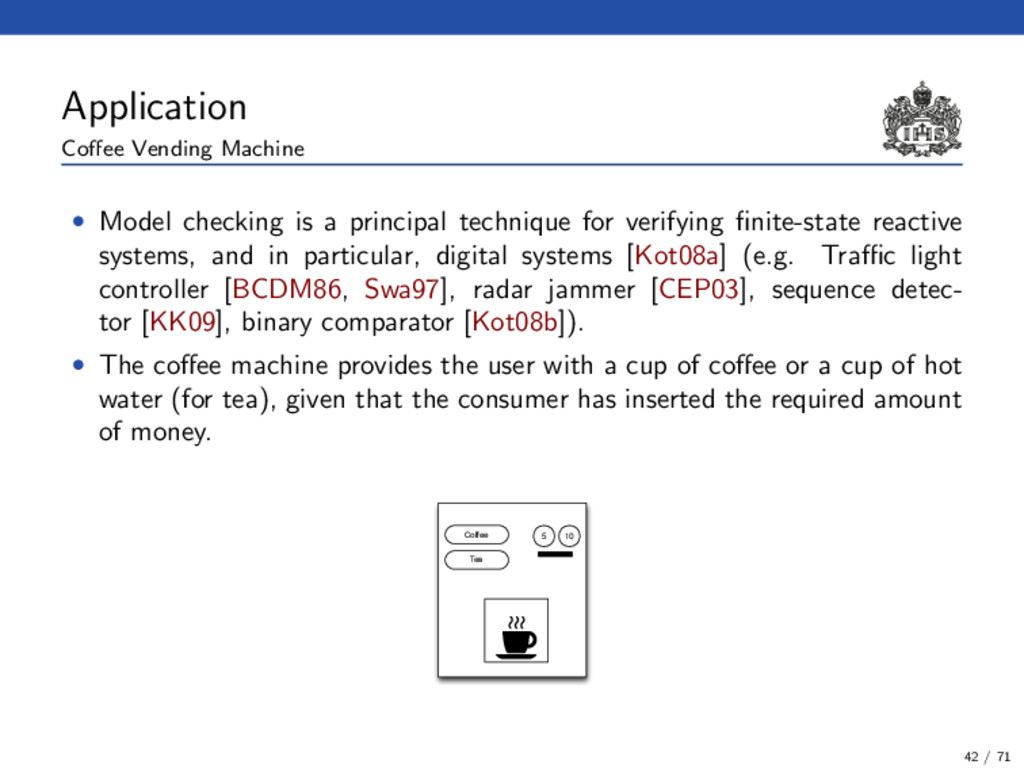
![Motivation • Concurrent Constraint Programming (ccp) [Sar93] is a formalism](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_2.jpg){kind=link}
![Motivation • Temporal Concurrent Constraint Programming (tcc) [SJG94] extends ccp](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_3.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics temperature](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_11.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics temperature](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_12.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics ask](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_13.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics ask](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_14.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics ask](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_15.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics Stimulus](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_16.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics Stimulus](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_17.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics Stimulus](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_18.jpg){kind=link}
![The tcc Calculus [SJG94] Intuitive Description and Operational Semantics Stimulus](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_19.jpg){kind=link}
![The tcc Calculus [SJG94] Syntax Process Description Action within the](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_20.jpg){kind=link}
![The tcc Calculus [SJG94] Example Example p():: now (in=true) then](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![The tcc Calculus [SJG94] Formal Syntax (Agents) A ::= c](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_105.jpg){kind=link}
![The tcc Calculus [SJG94] Formal Operational Semantics Axioms for →.](https://files.speakerdeck.com/presentations/6e1a652a0a4444aa9489439f3d370996/slide_106.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}