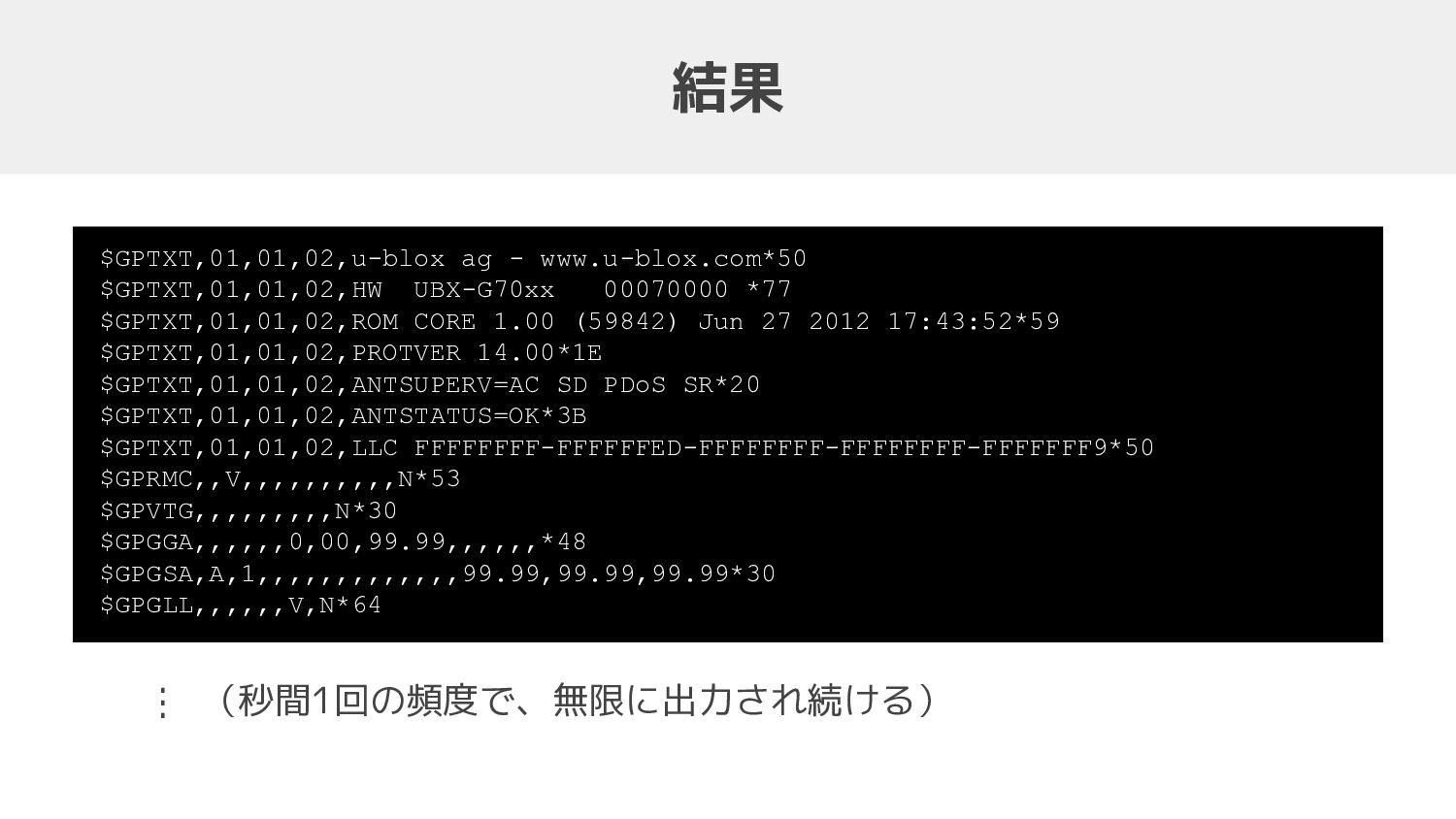
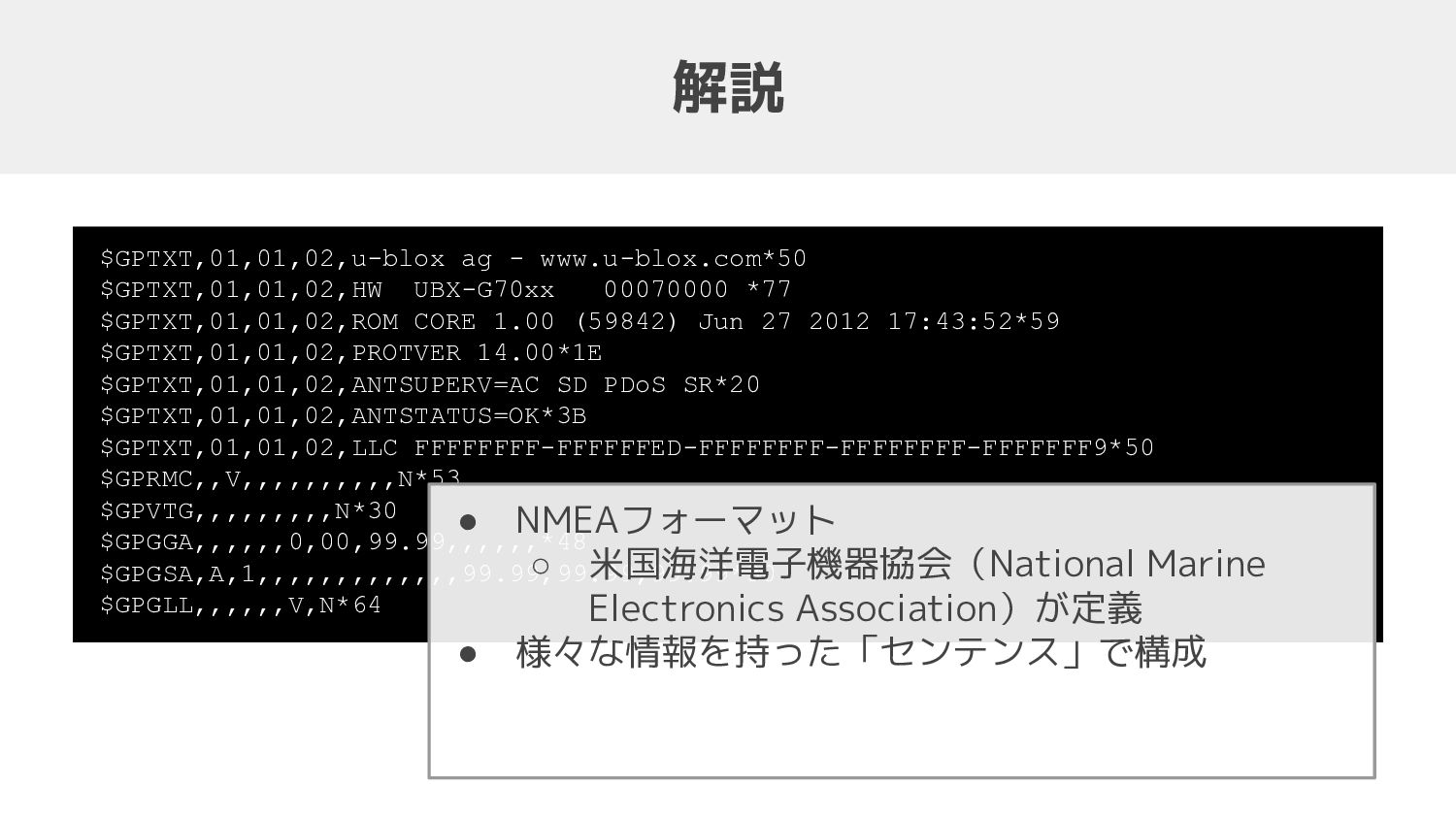
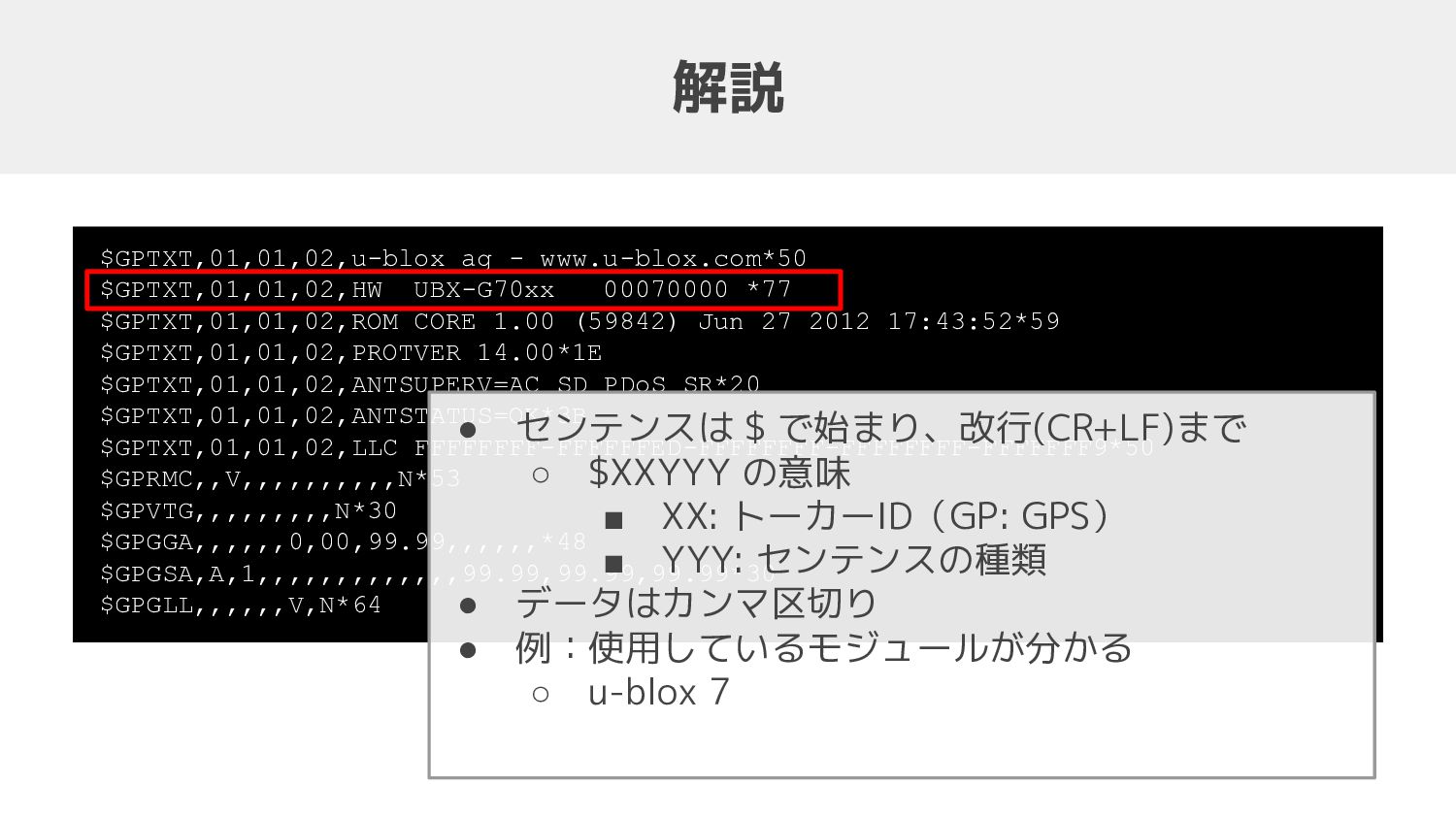
CORE 1.00 (59842) Jun 27 2012 17:43:52*59 $GPTXT,01,01,02,PROTVER 14.00*1E $GPTXT,01,01,02,ANTSUPERV=AC SD PDoS SR*20 $GPTXT,01,01,02,ANTSTATUS=OK*3B $GPTXT,01,01,02,LLC FFFFFFFF-FFFFFFED-FFFFFFFF-FFFFFFFF-FFFFFFF9*50 $GPRMC,,V,,,,,,,,,,N*53 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,00,99.99,,,,,,*48 $GPGSA,A,1,,,,,,,,,,,,,99.99,99.99,99.99*30 $GPGLL,,,,,,V,N*64 • センテンスは $ で始まり、改行(CR+LF)まで ◦ $XXYYY の意味 ▪ XX: トーカーID(GP: GPS) ▪ YYY: センテンスの種類 • データはカンマ区切り • 例:使用しているモジュール 分 る ◦ u-blox 7
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}