講義に入る前に 確認事項
前回までの復習
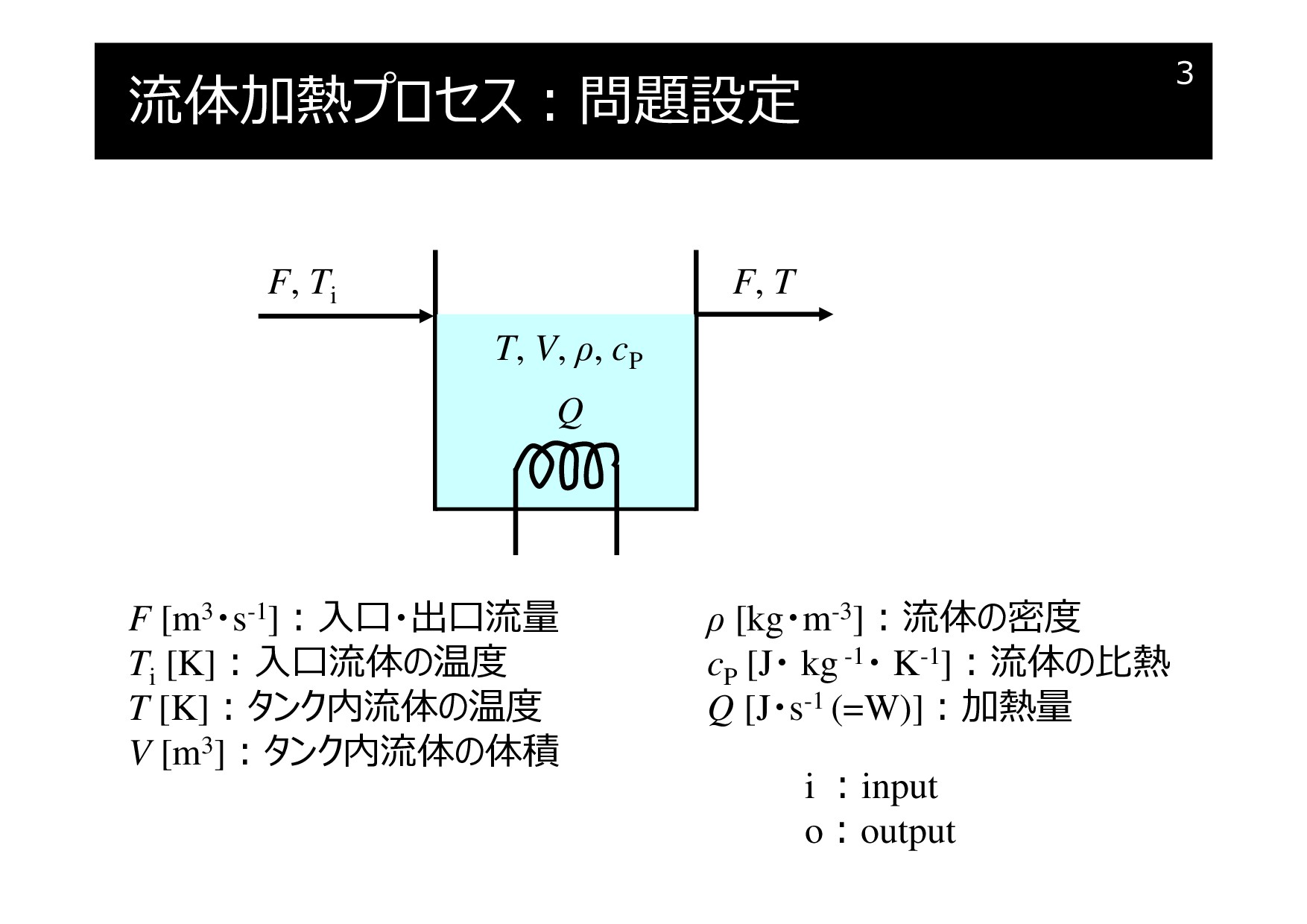
流体加熱プロセス:問題設定
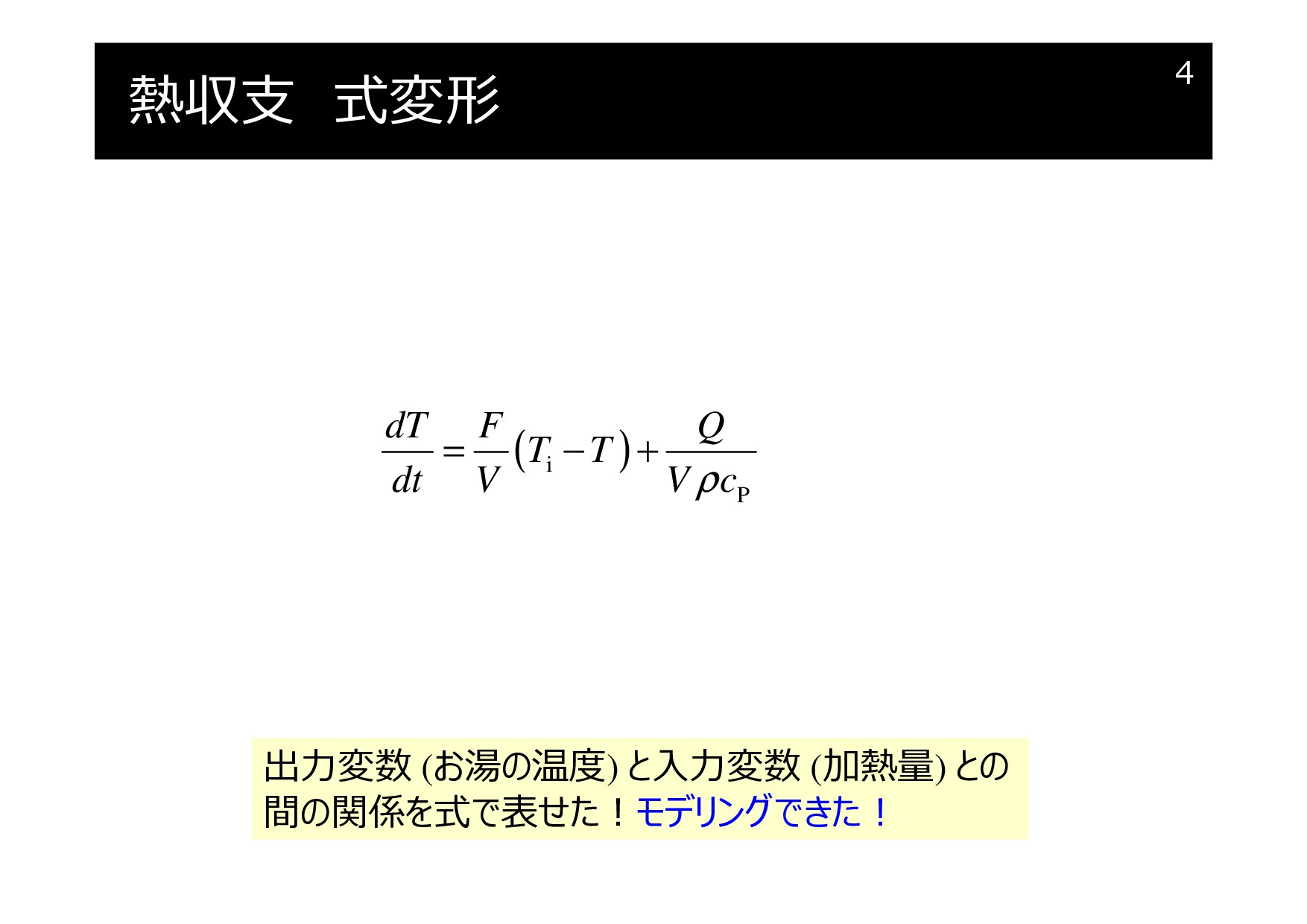
熱収支 式変形
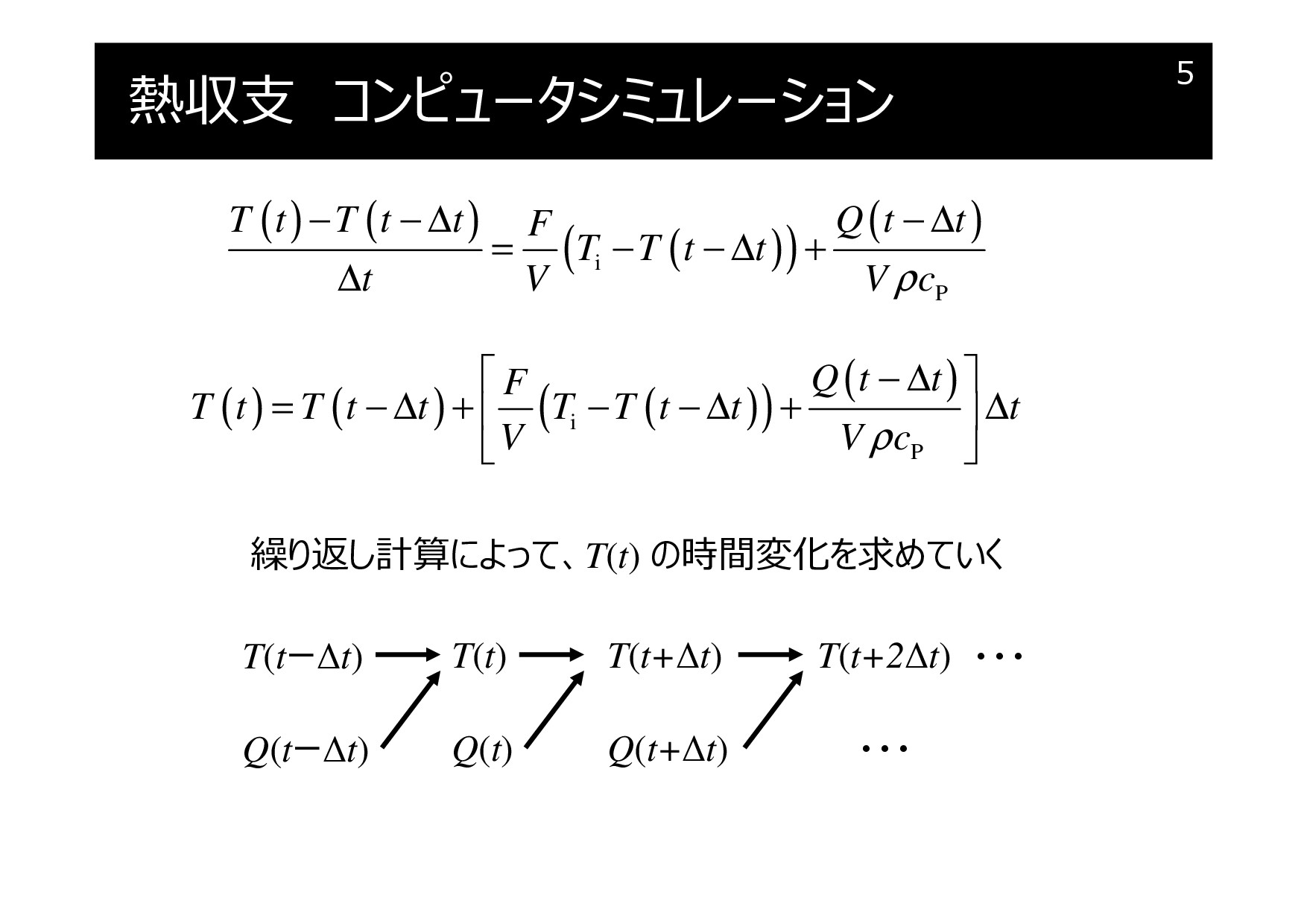
熱収支 コンピュータシミュレーション
流体加熱プロセスのシミュレーション
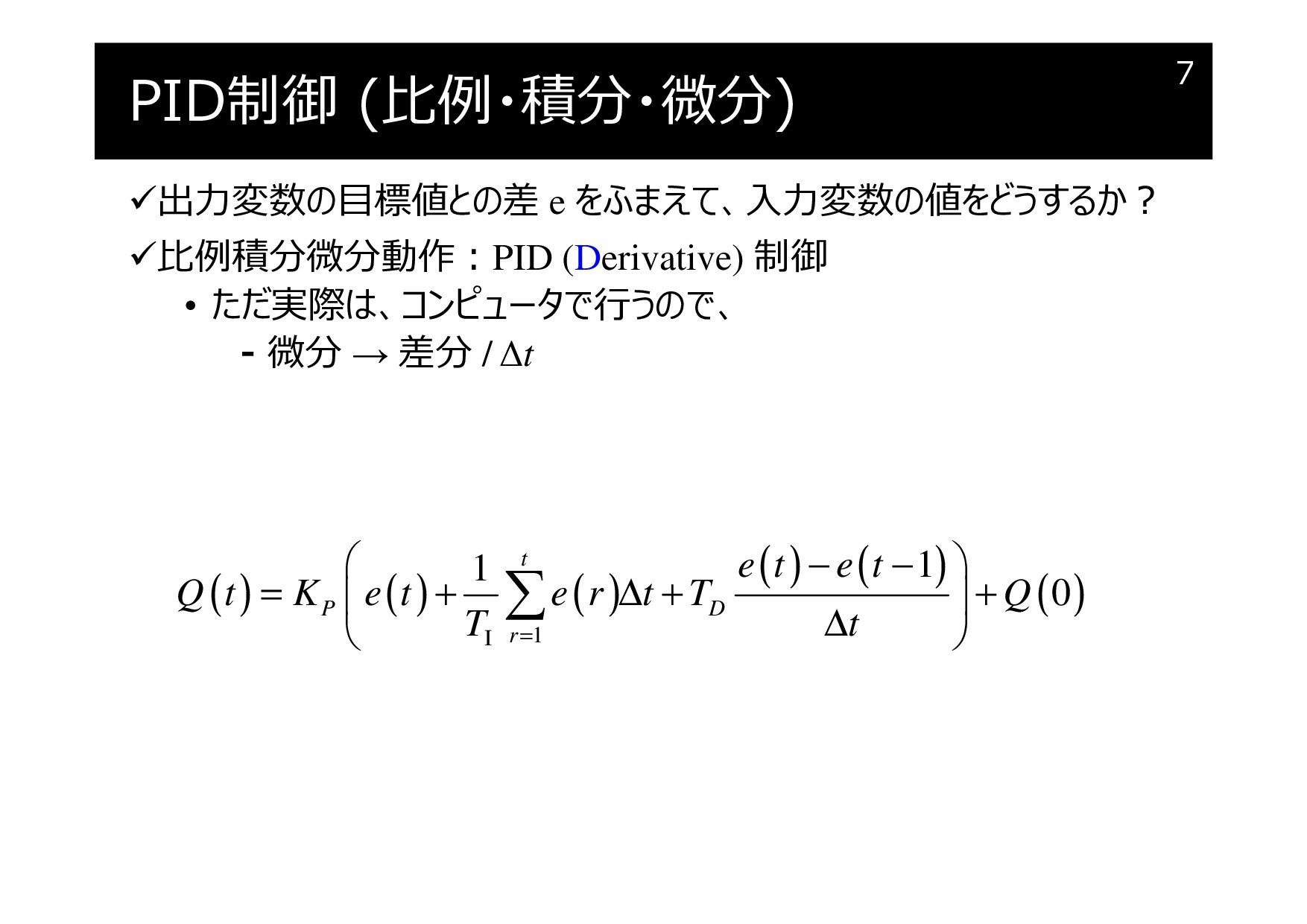
PID制御 (比例・積分・微分)
出力変数と入力変数との関係
実験データを使う経験的な方法
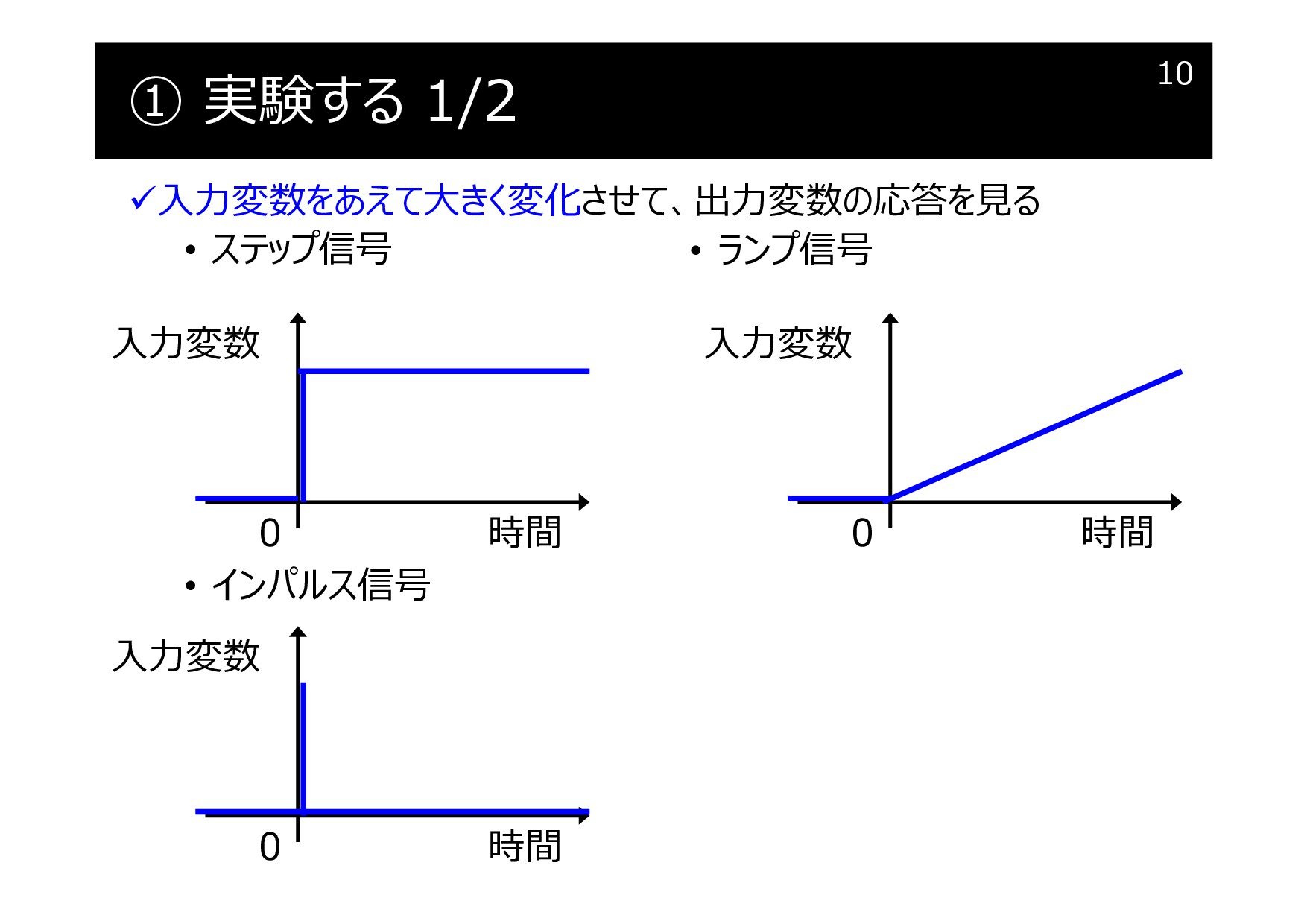
① 実験する 1/2
① 実験する 2/2
② モデルの概形を決める
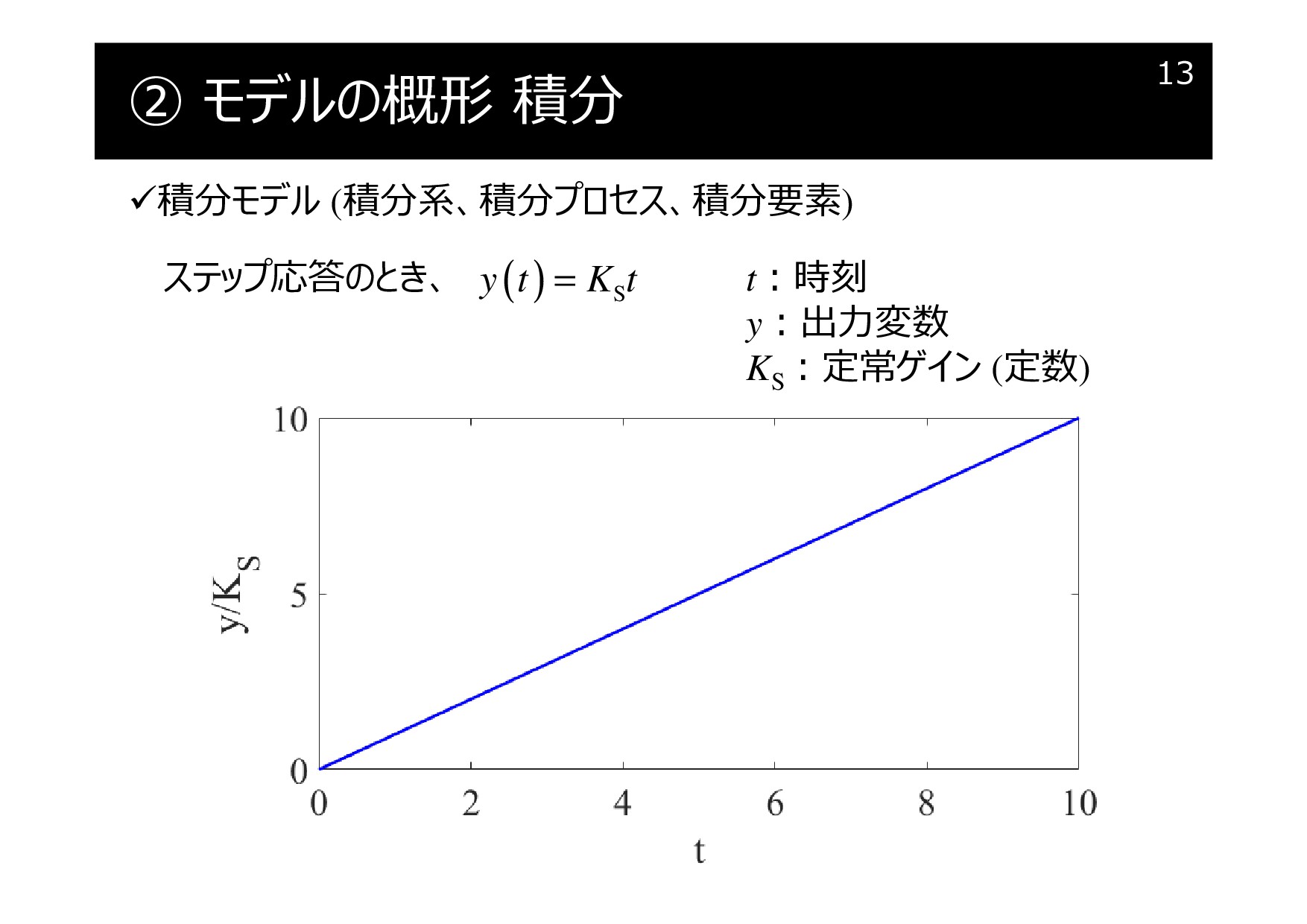
② モデルの概形 積分
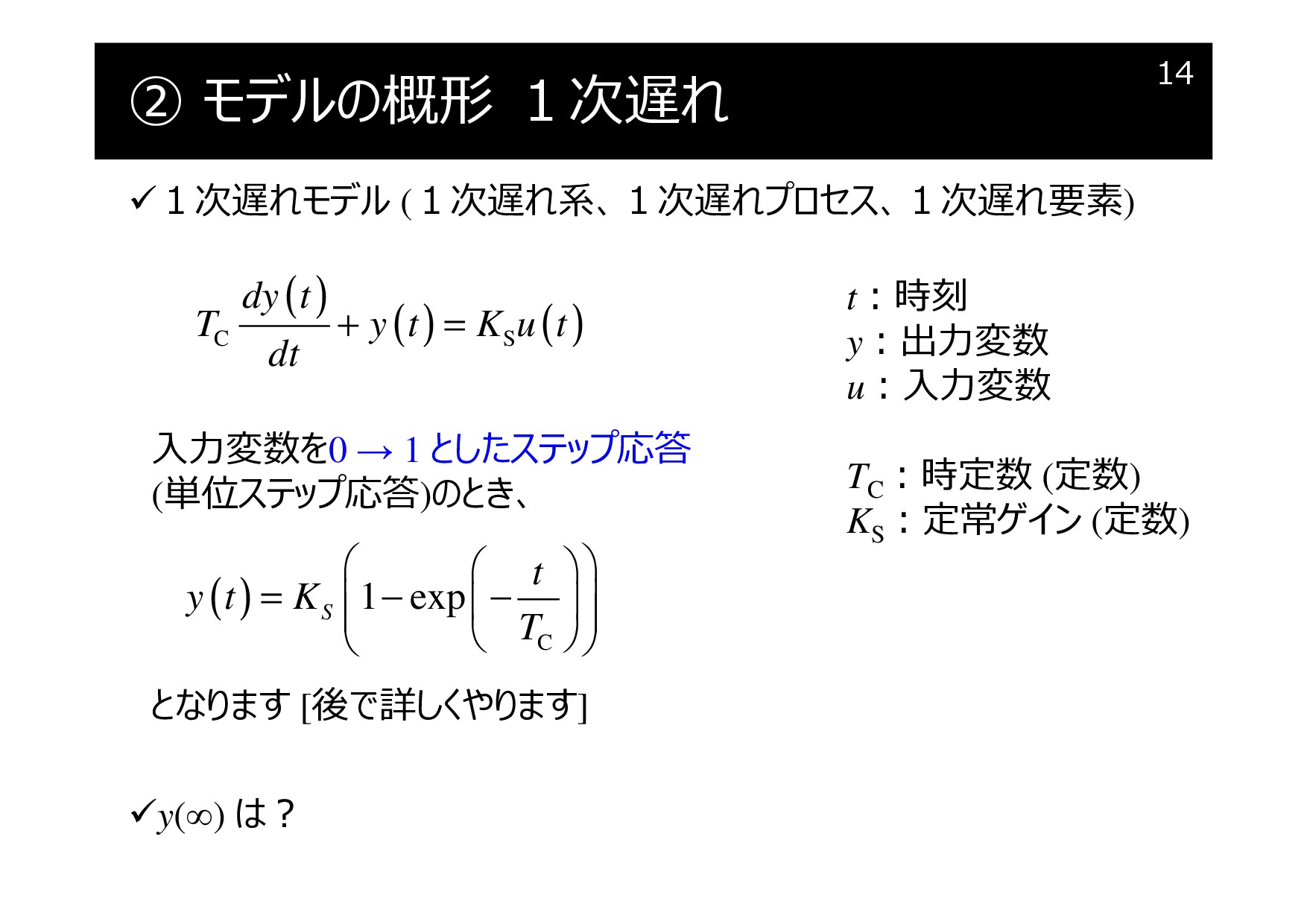
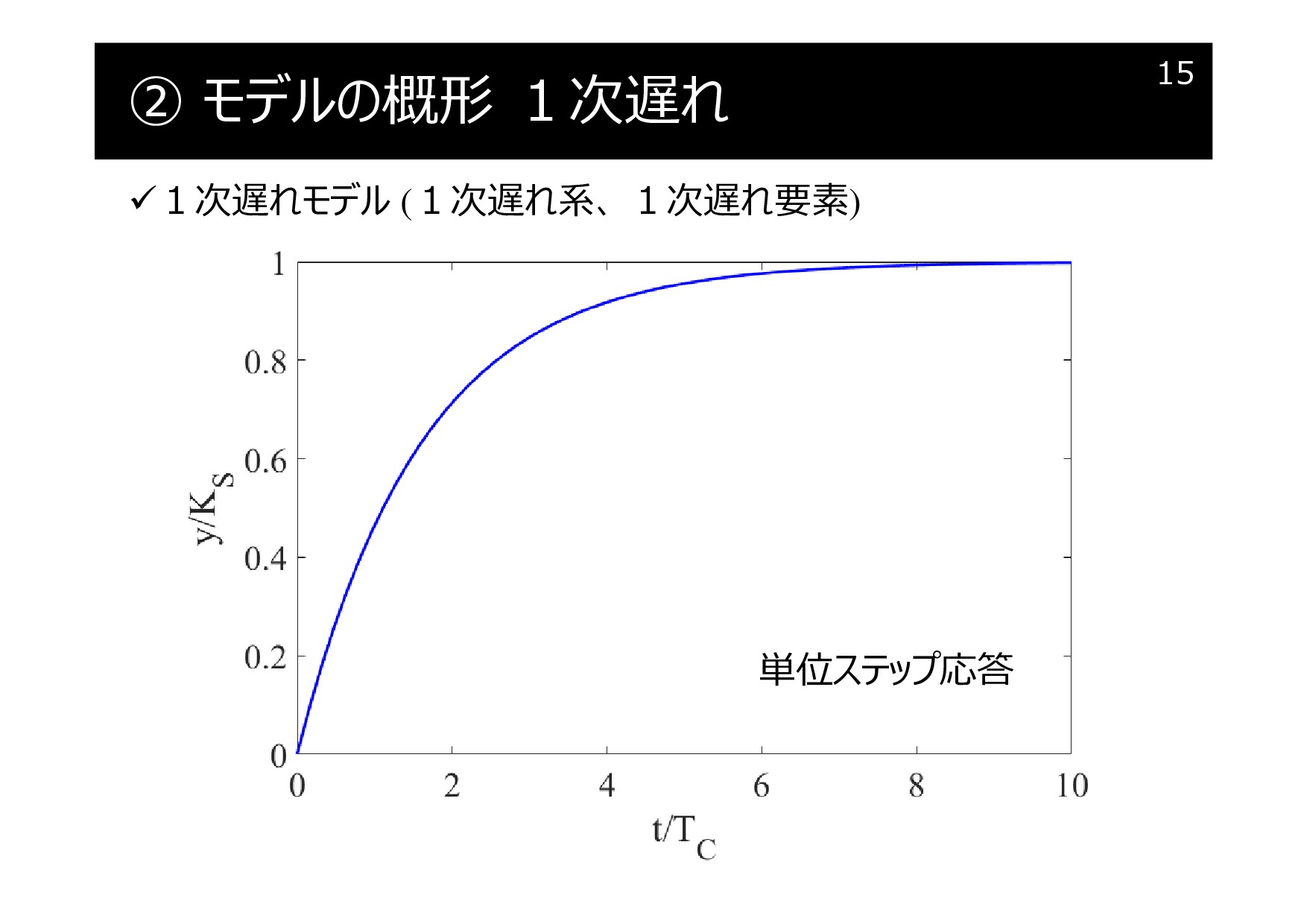
② モデルの概形 1次遅れ
② モデルの概形 1次遅れ
② [クイズ]
② [クイズ 回答]
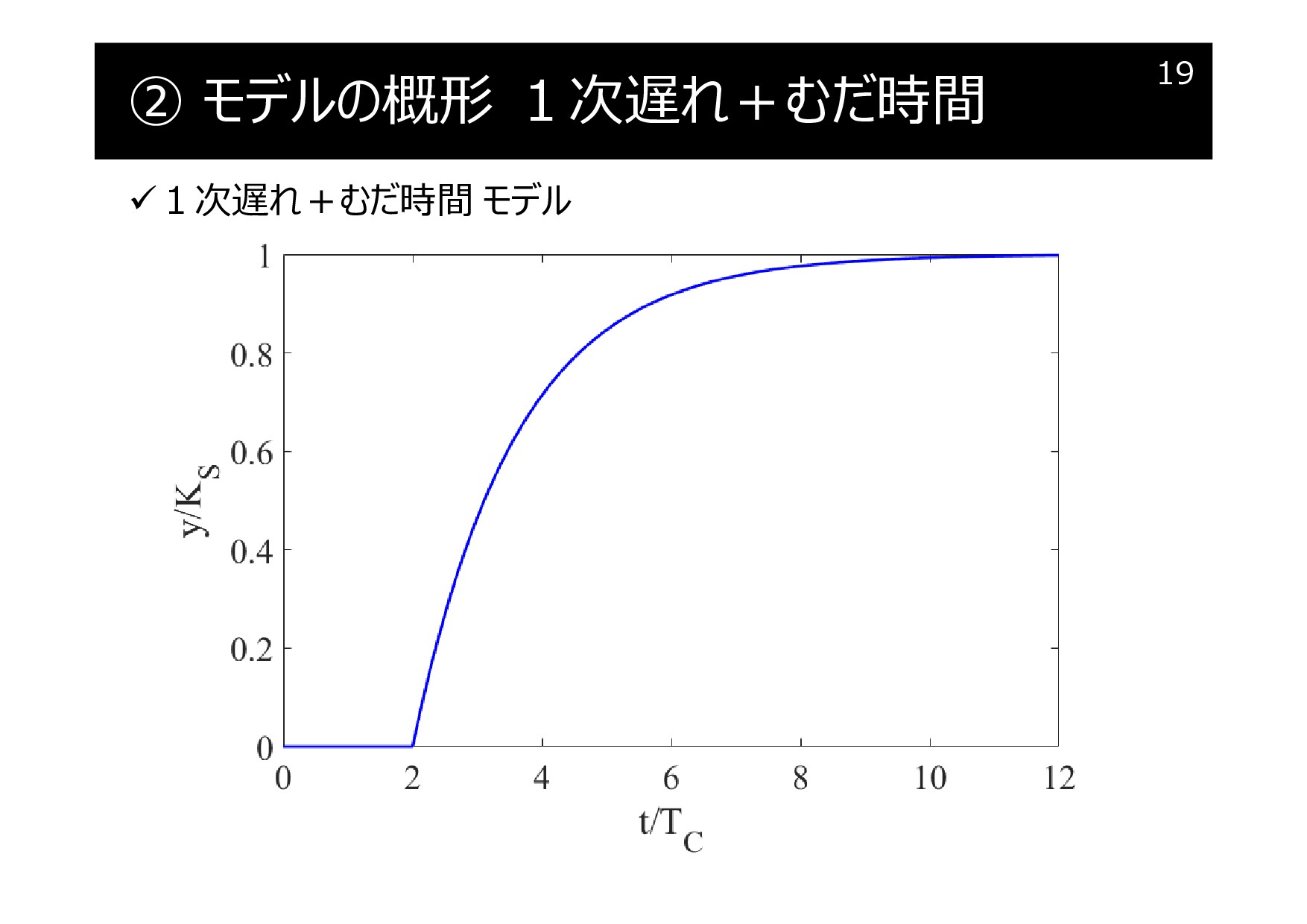
② モデルの概形 1次遅れ+むだ時間
② モデルの概形 1次遅れ+むだ時間
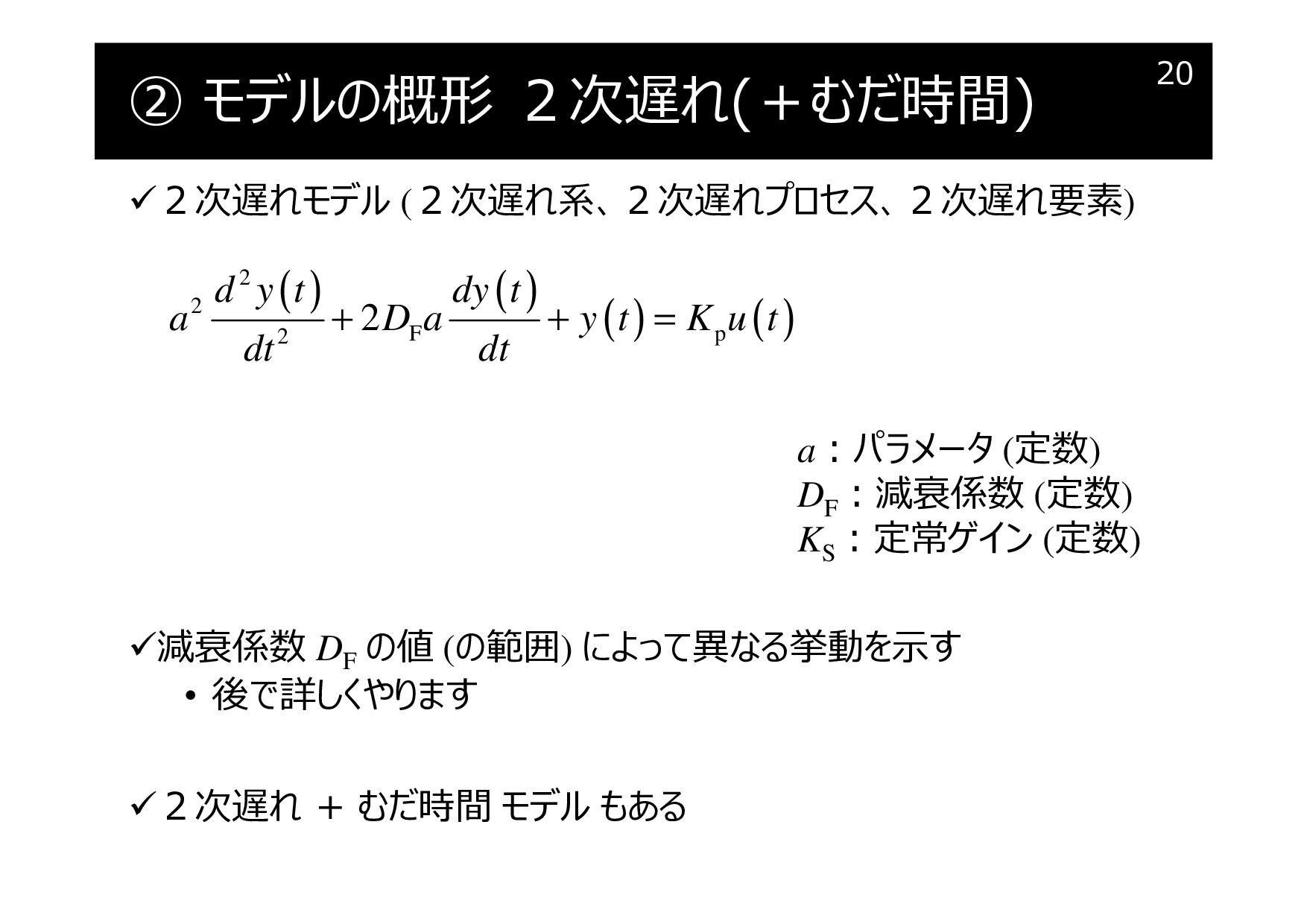
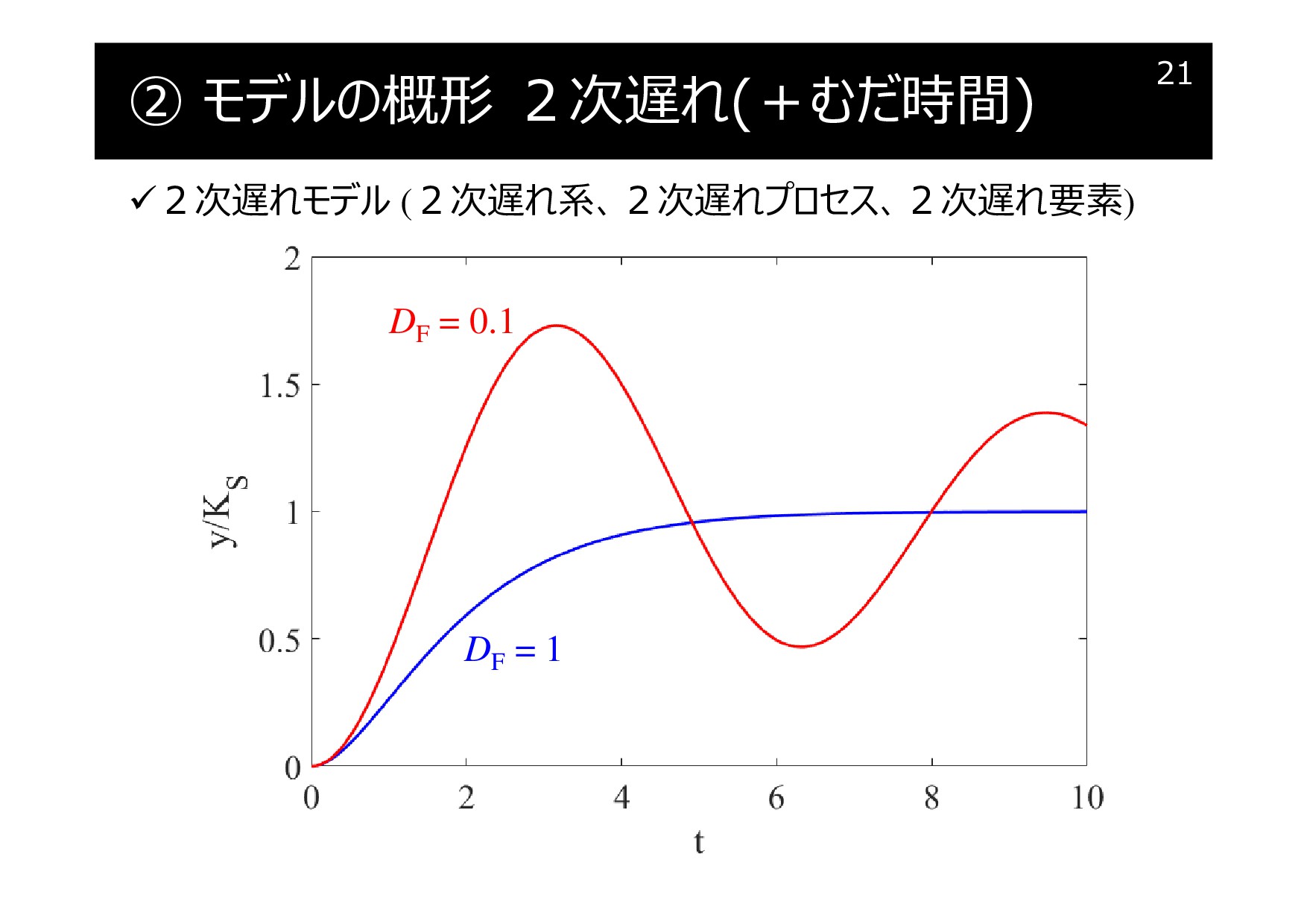
② モデルの概形 2次遅れ(+むだ時間)
② モデルの概形 2次遅れ(+むだ時間)
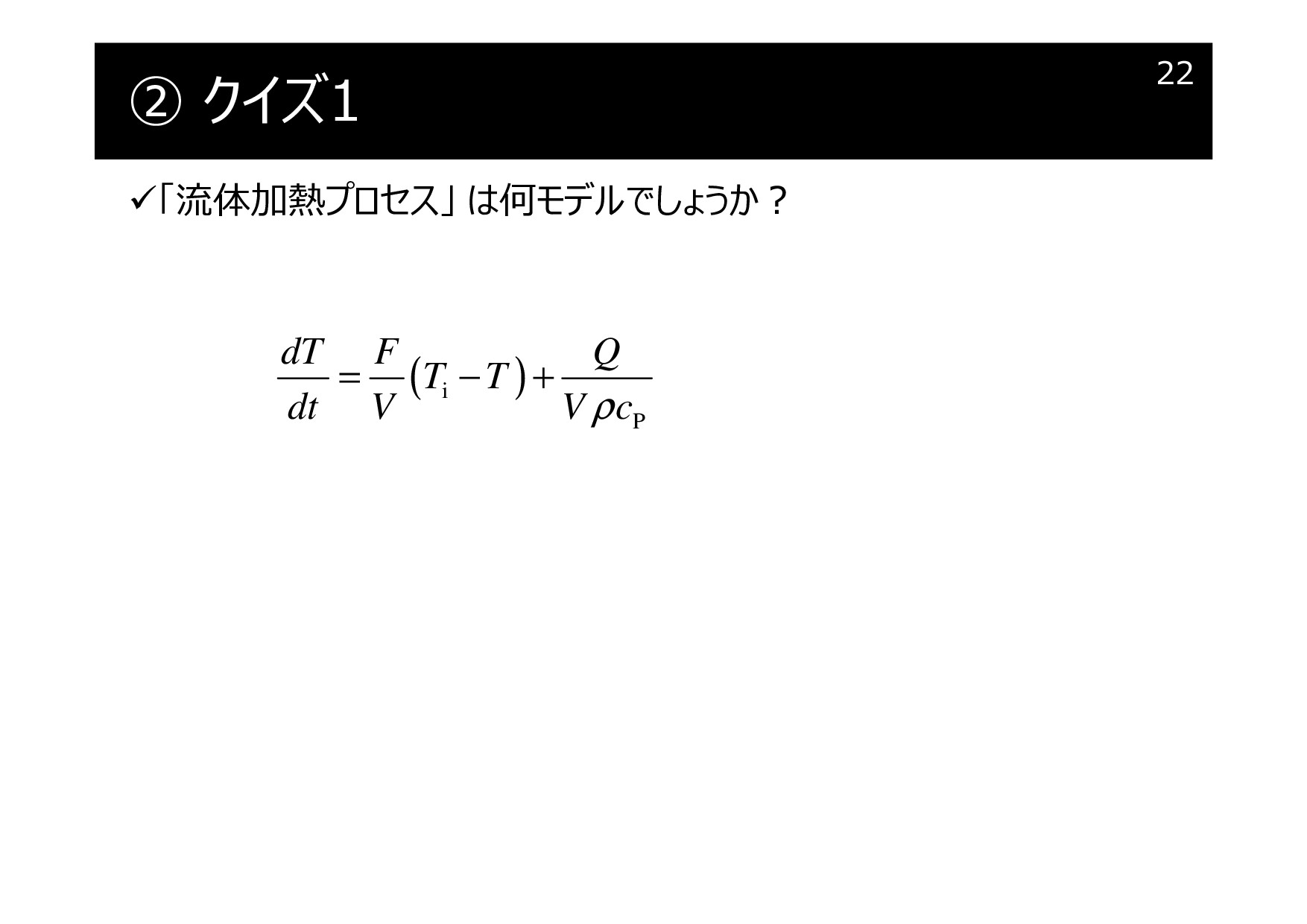
② クイズ1
② クイズ2
② モデルの概形をどうやって決める?
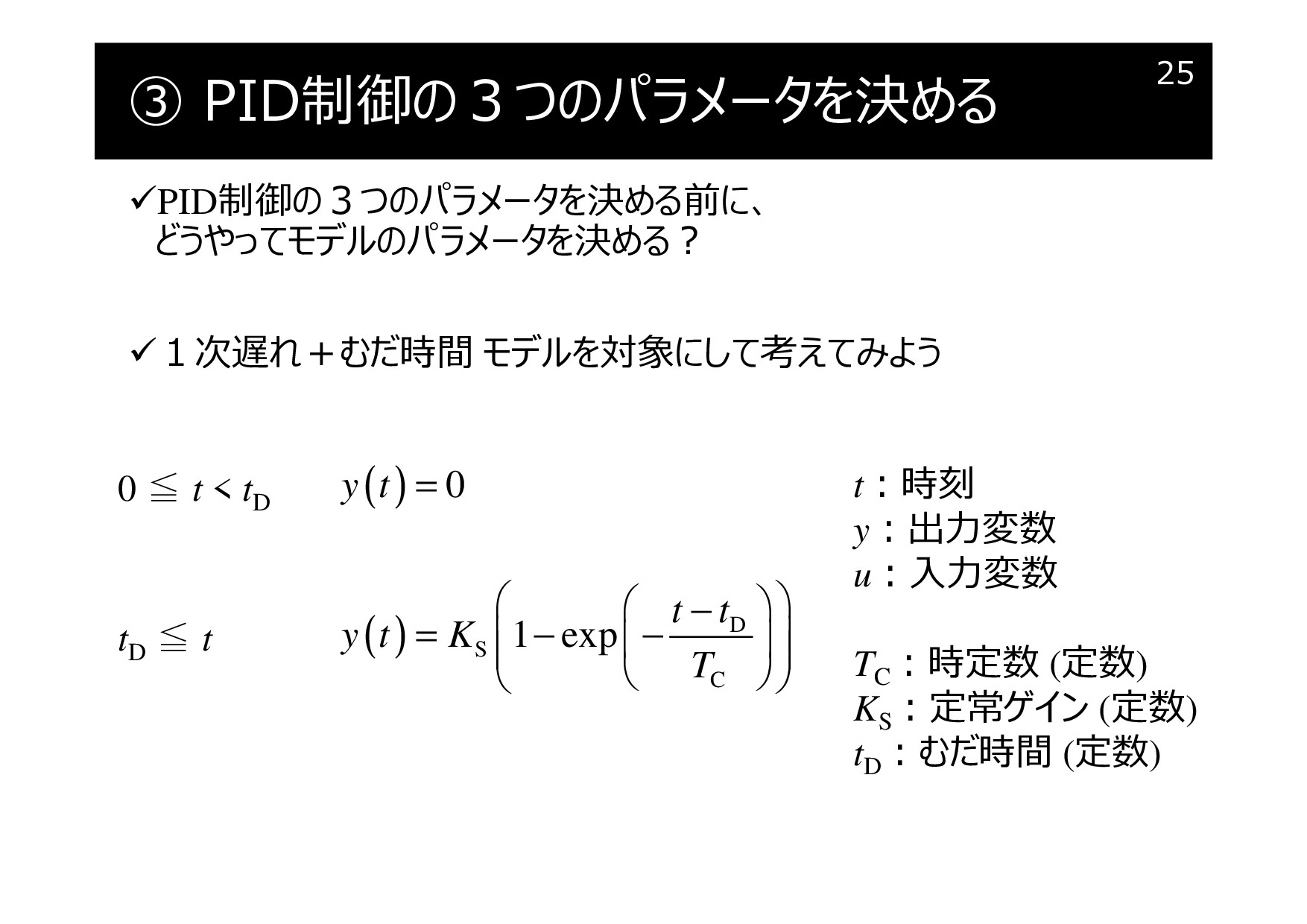
③ PID制御の3つのパラメータを決める
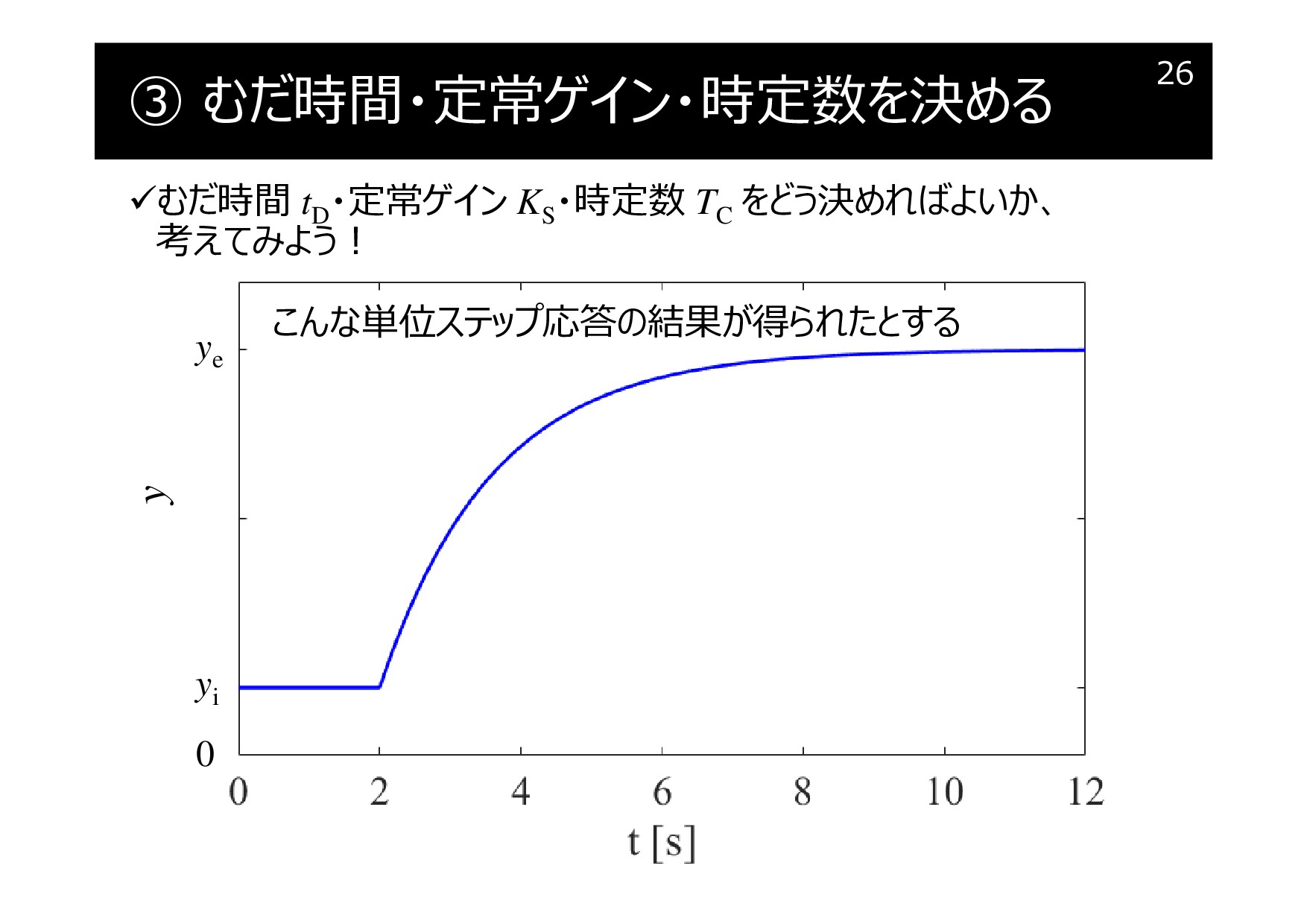
③ むだ時間・定常ゲイン・時定数を決める
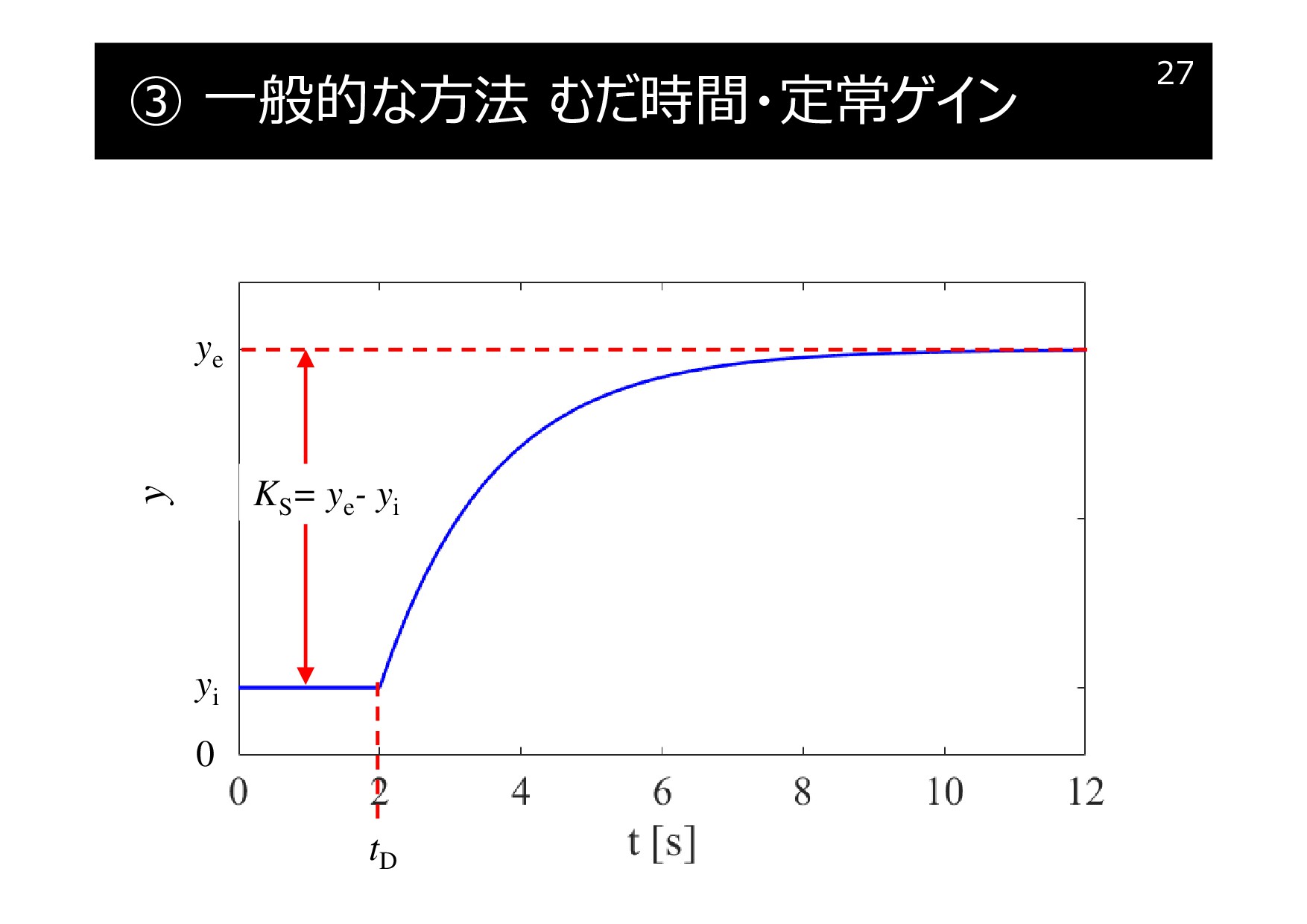
③ 一般的な方法 むだ時間・定常ゲイン
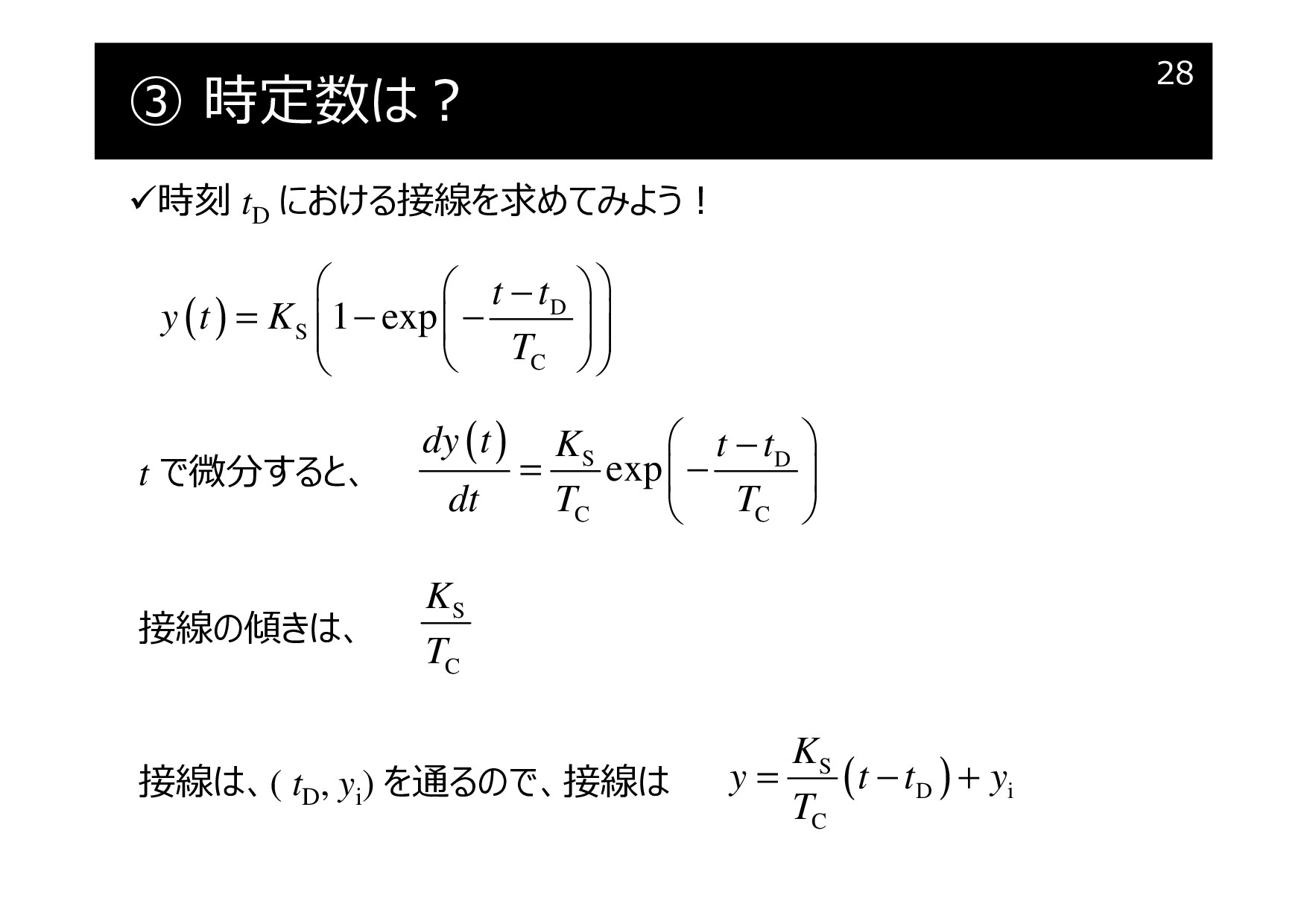
③ 時定数は?
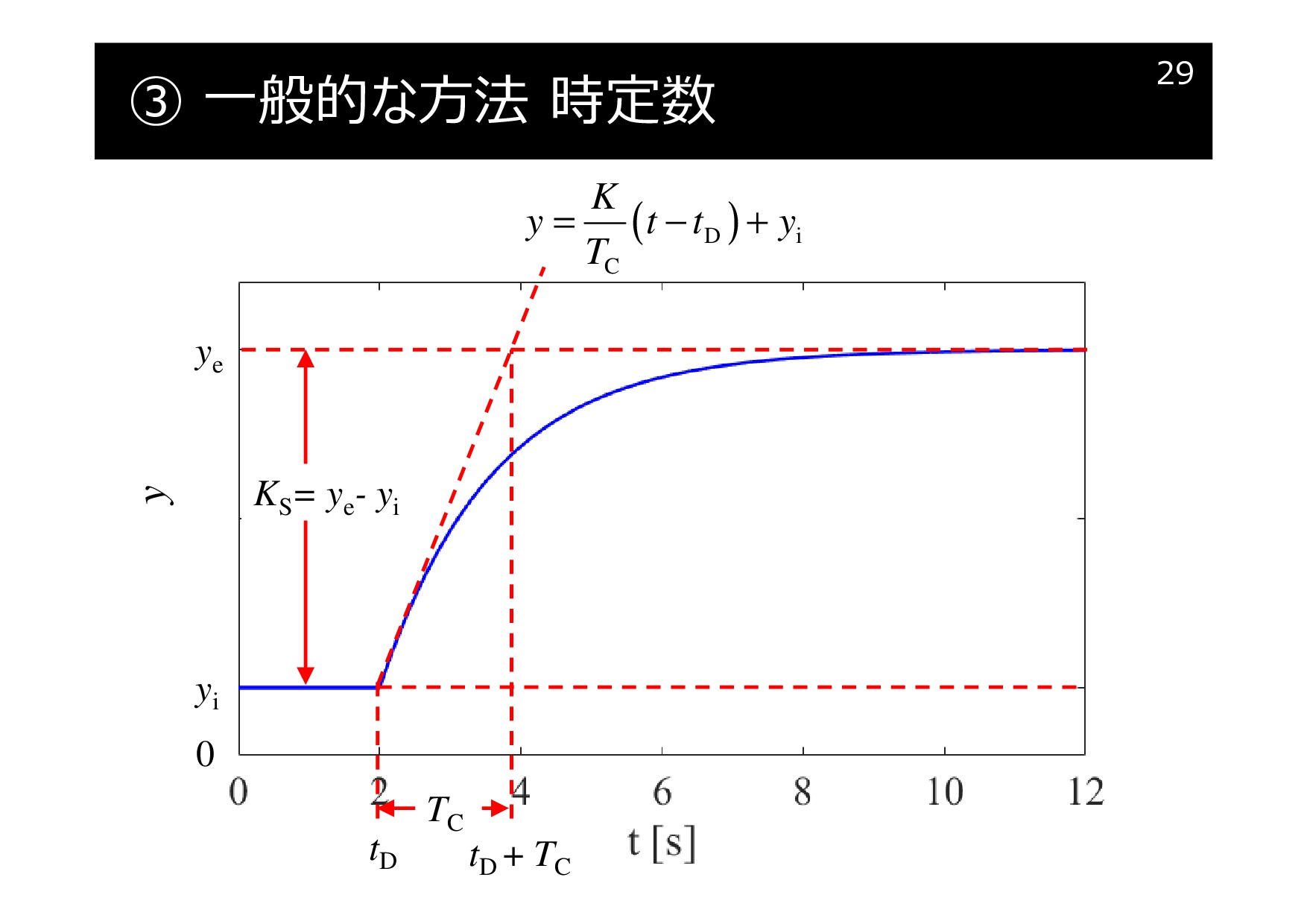
③ 一般的な方法 時定数
③ ただ実際の(単位)ステップ応答は・・・
③ 実際の一般的な方法
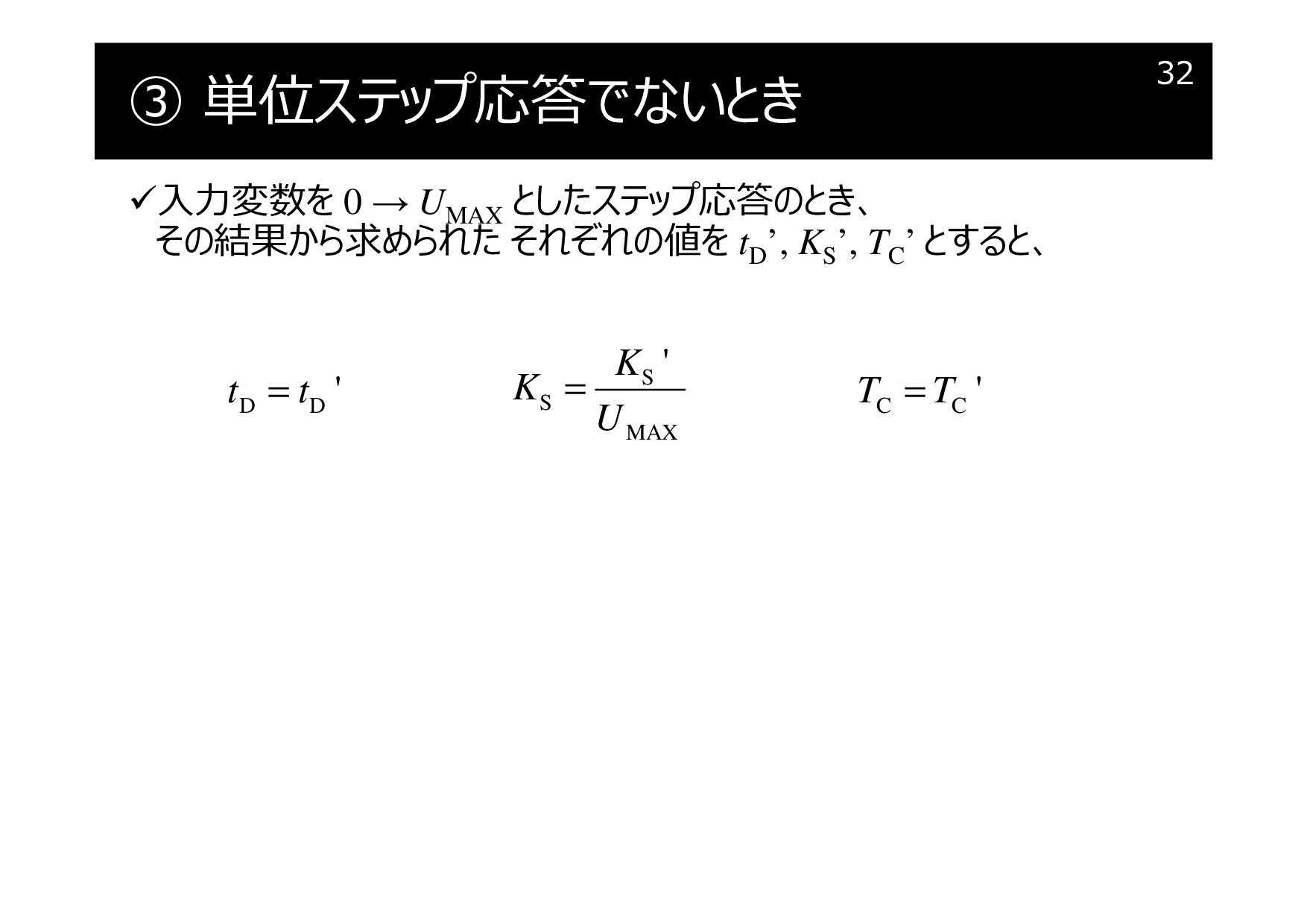
③ 単位ステップ応答でないとき
③ 絨毯爆撃的な方法もある
③ PID制御の3つのパラメータを決める
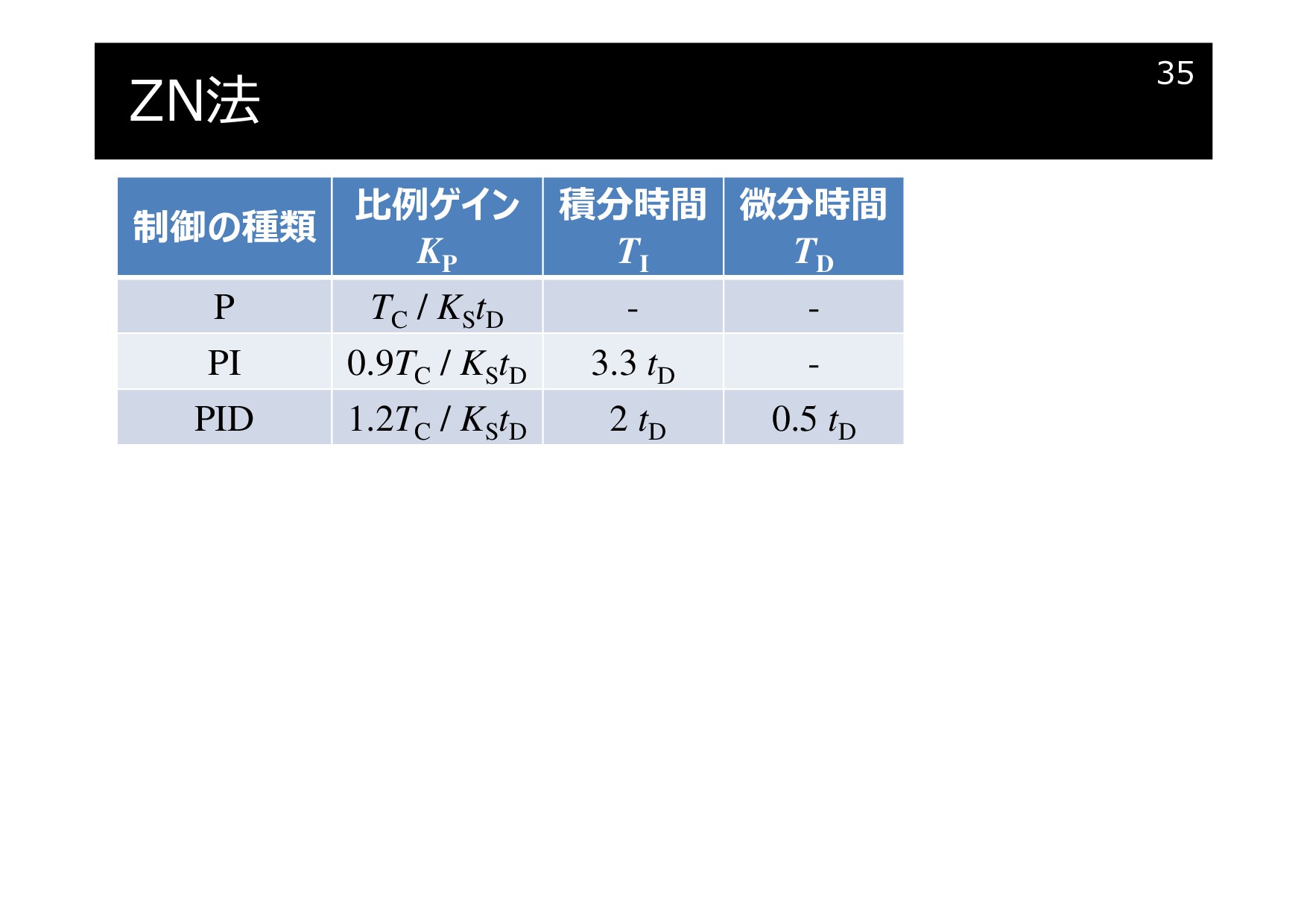
ZN法
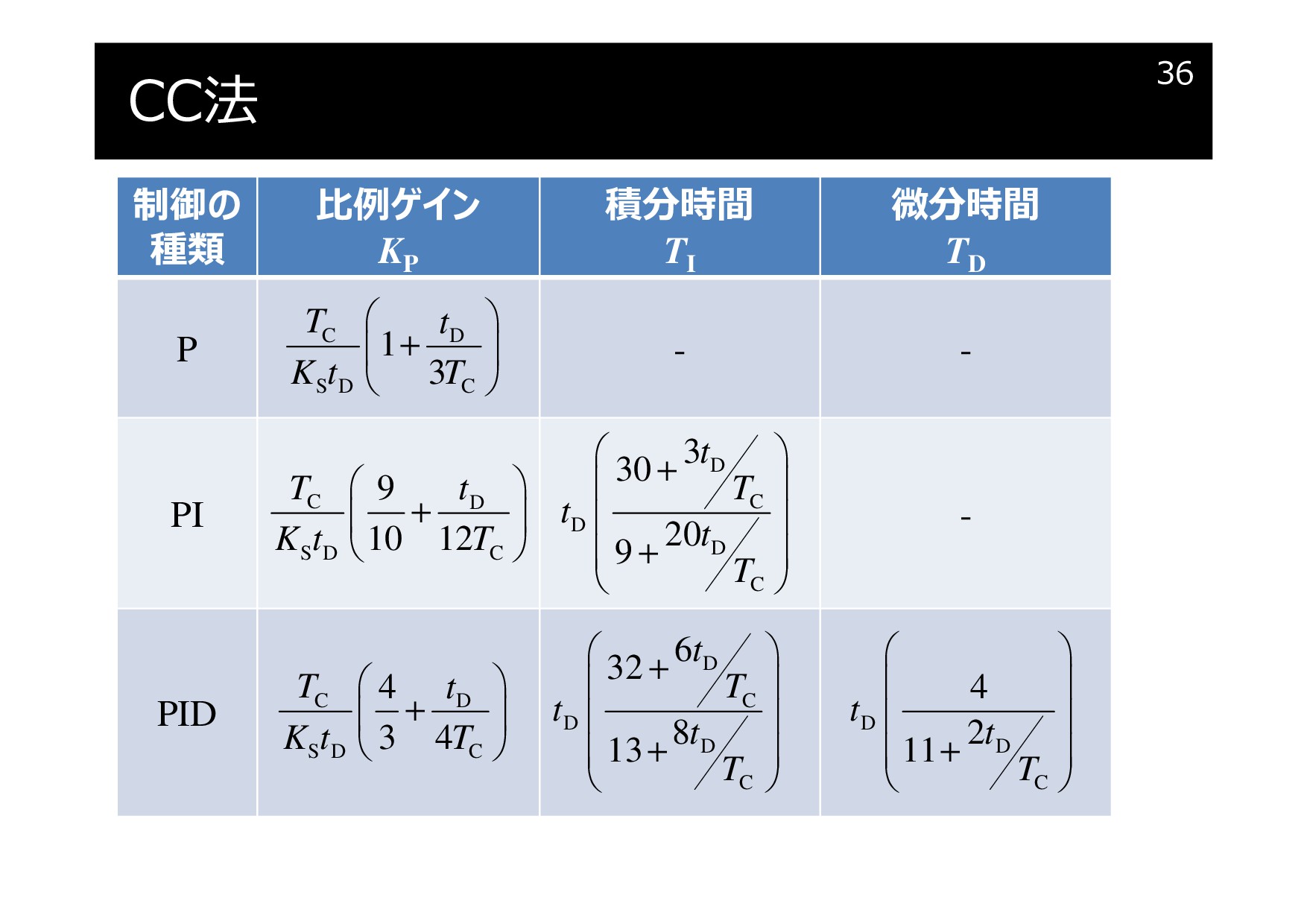
CC法
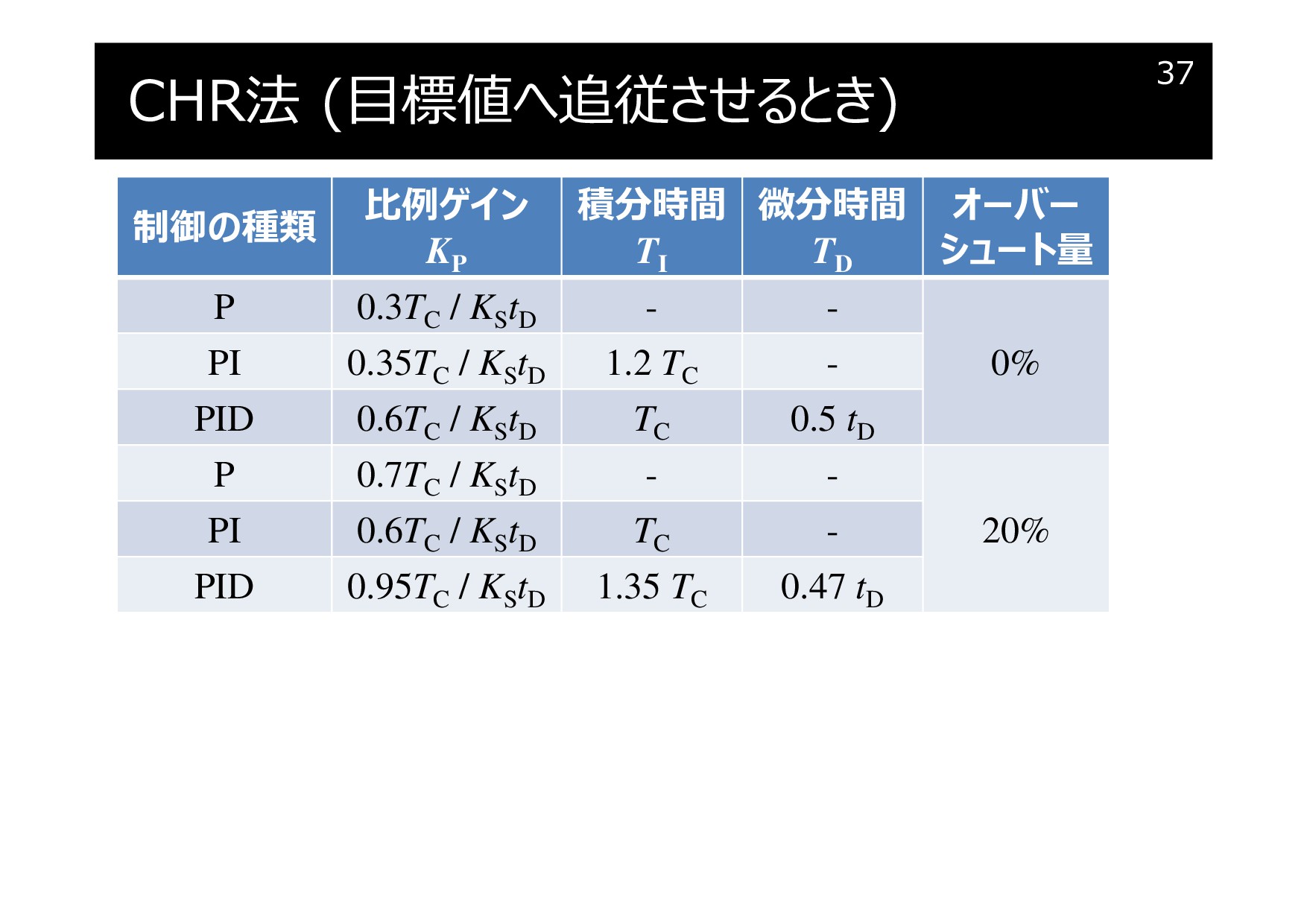
CHR法 (目標値へ追従させるとき)
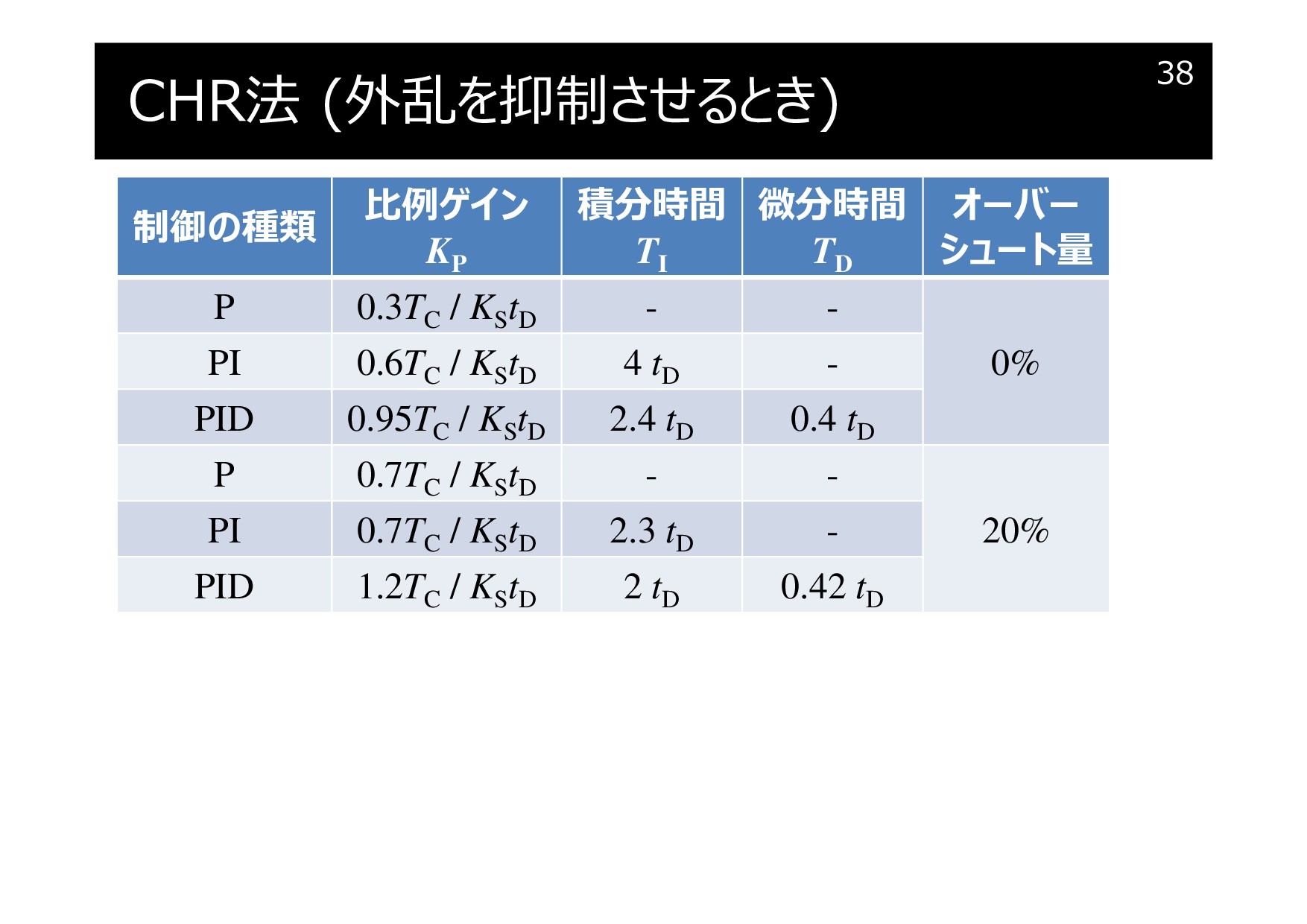
CHR法 (外乱を抑制させるとき)
制御しよう!
仮想的な『流体加熱プロセス』
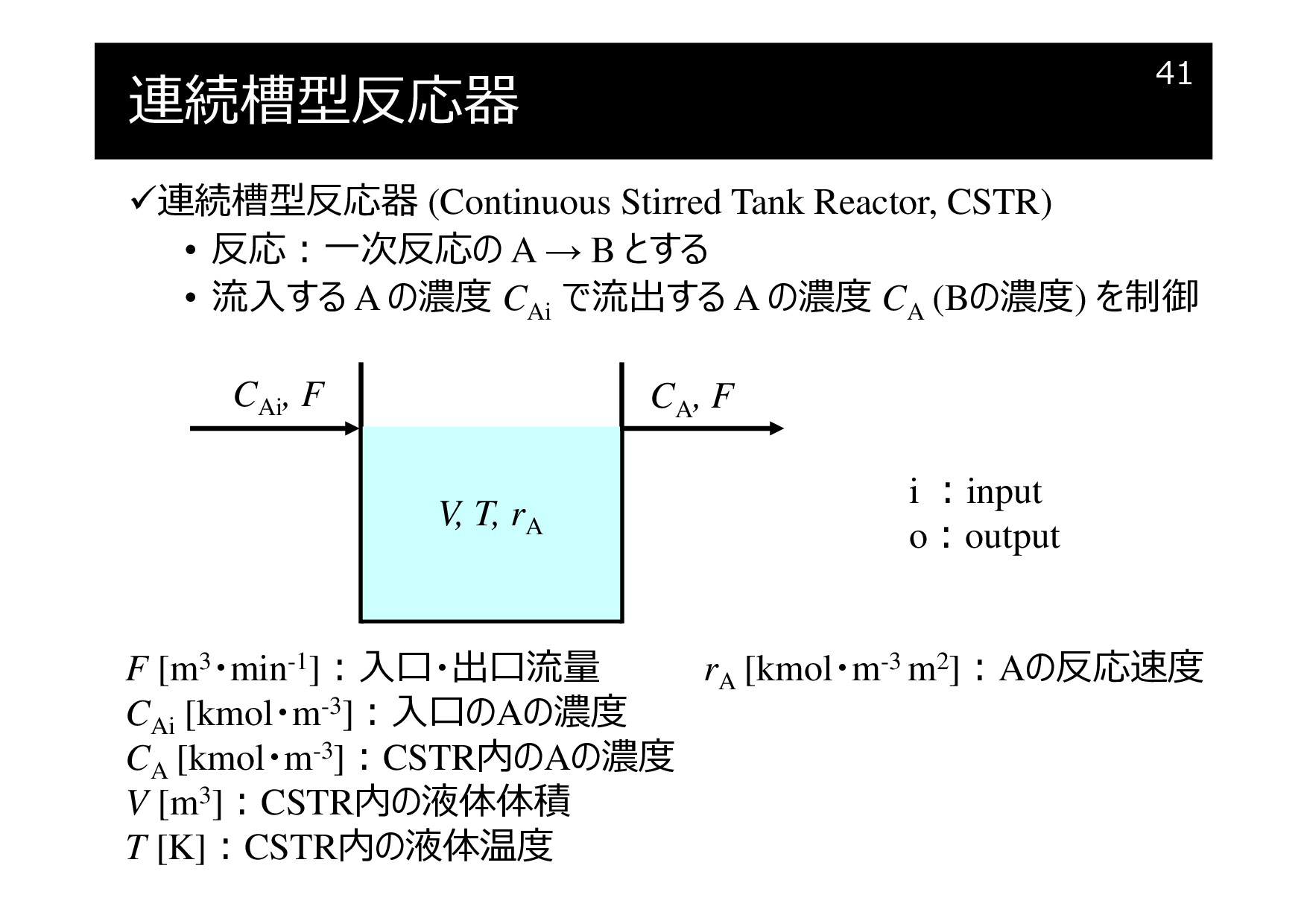
連続槽型反応器
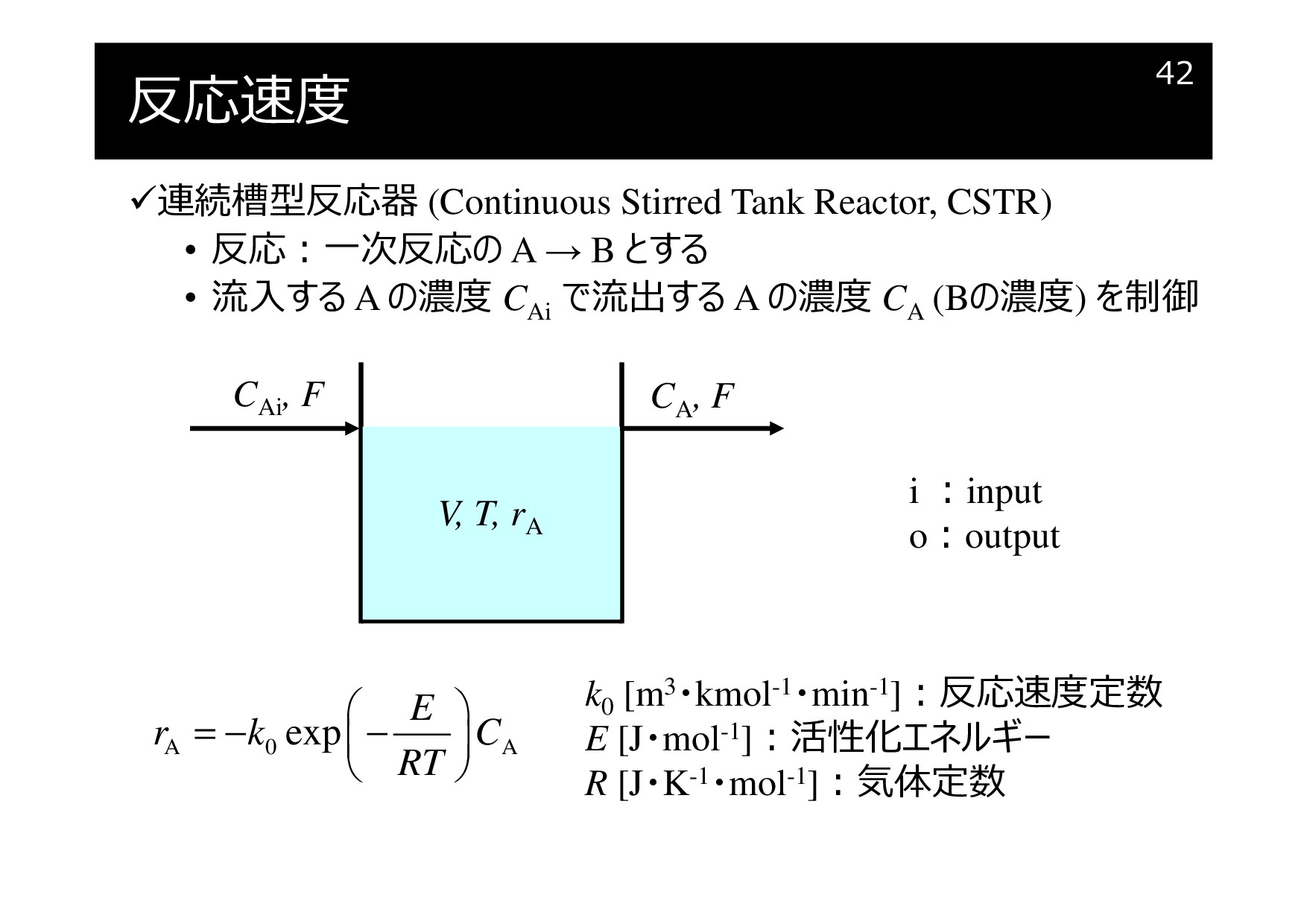
反応速度
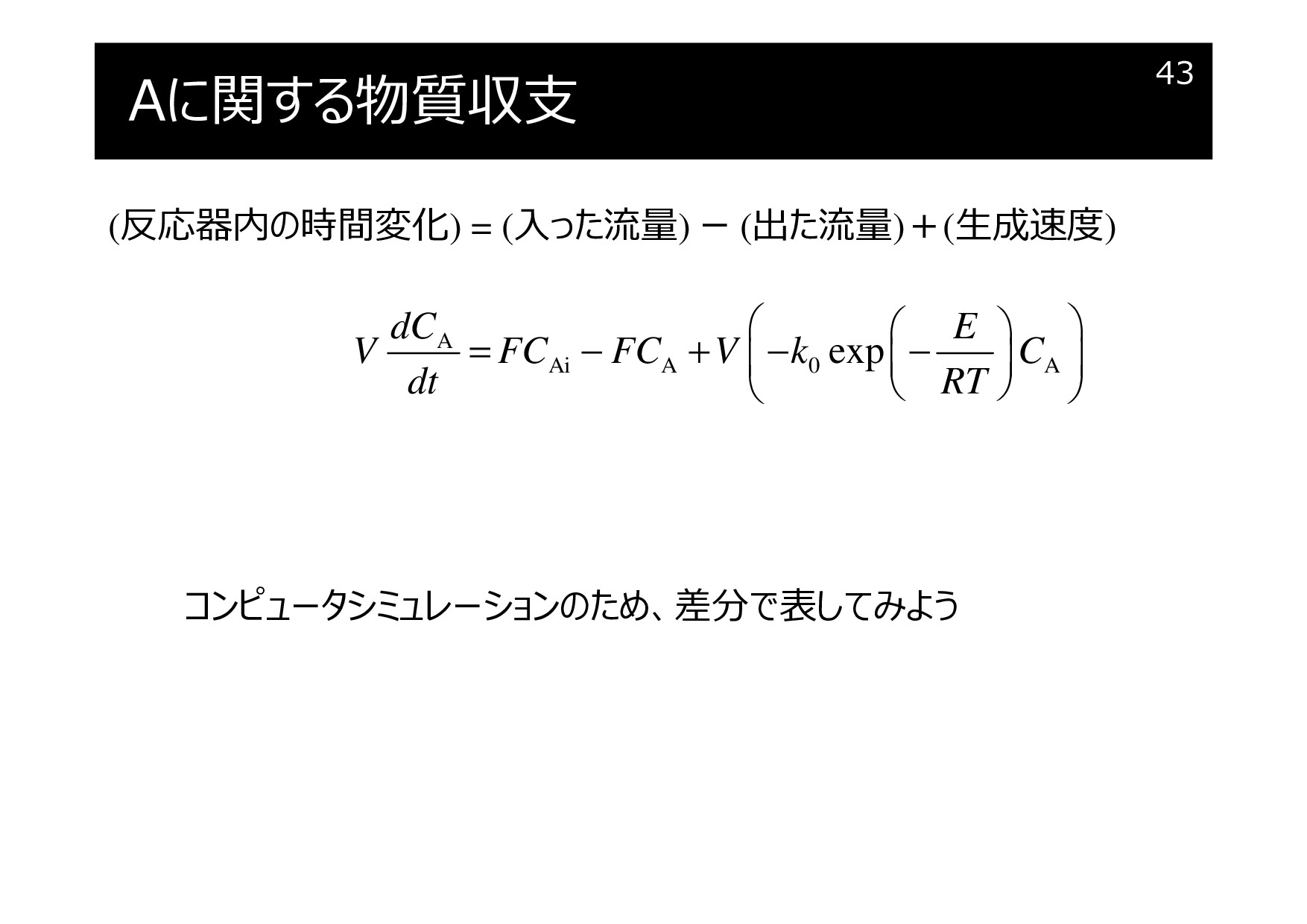
Aに関する物質収支
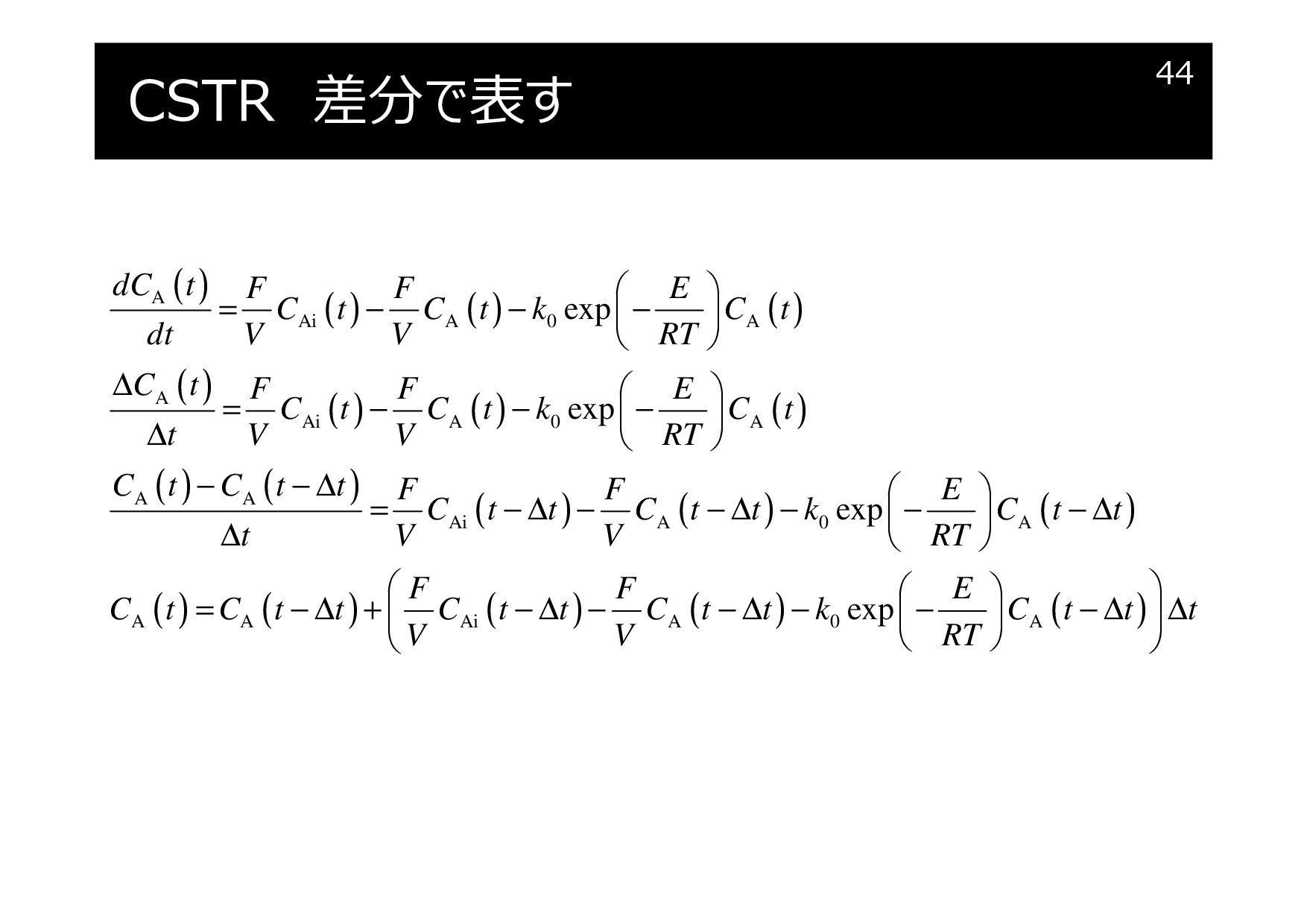
CSTR 差分で表す
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![流体加熱プロセスのシミュレーション F [m3・s-1]︓入⼝流量・出⼝流量 = 0.00005 Ti [K]︓入⼝流体の温度 = 20 [℃]](https://files.speakerdeck.com/presentations/e2b8440642264dee8253740743c18948/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![① 実験する 2/2 入⼒変数をあえて⼤きく変化させて、出⼒変数の応答を⾒る • ステップ信号 → ステップ応答 [最も一般的] •](https://files.speakerdeck.com/presentations/e2b8440642264dee8253740743c18948/slide_11.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![② [クイズ] 16 ( ) ( ) i 0 P](https://files.speakerdeck.com/presentations/e2b8440642264dee8253740743c18948/slide_16.jpg){kind=link}
![② [クイズ 回答] 17 ( ) i 0 P P](https://files.speakerdeck.com/presentations/e2b8440642264dee8253740743c18948/slide_17.jpg){kind=link}
![② モデルの概形 1次遅れ+むだ時間 1次遅れ+むだ時間 モデル • tD [s]︓むだ時間 • t](https://files.speakerdeck.com/presentations/e2b8440642264dee8253740743c18948/slide_18.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![③ ただ実際の(単位)ステップ応答は・・・ 30 きれいでない︕ t [s] y](https://files.speakerdeck.com/presentations/e2b8440642264dee8253740743c18948/slide_30.jpg){kind=link}
![③ 実際の一般的な⽅法 31 t [s] y 傾きが最も急なところ (変曲点) に接線を引く tD](https://files.speakerdeck.com/presentations/e2b8440642264dee8253740743c18948/slide_31.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}