Share
2025/10/12(土)に専修大学生田キャンパスで開催された FOSS4G 2025 Japan でのショートプレゼン枠での発表に使用した資料です。
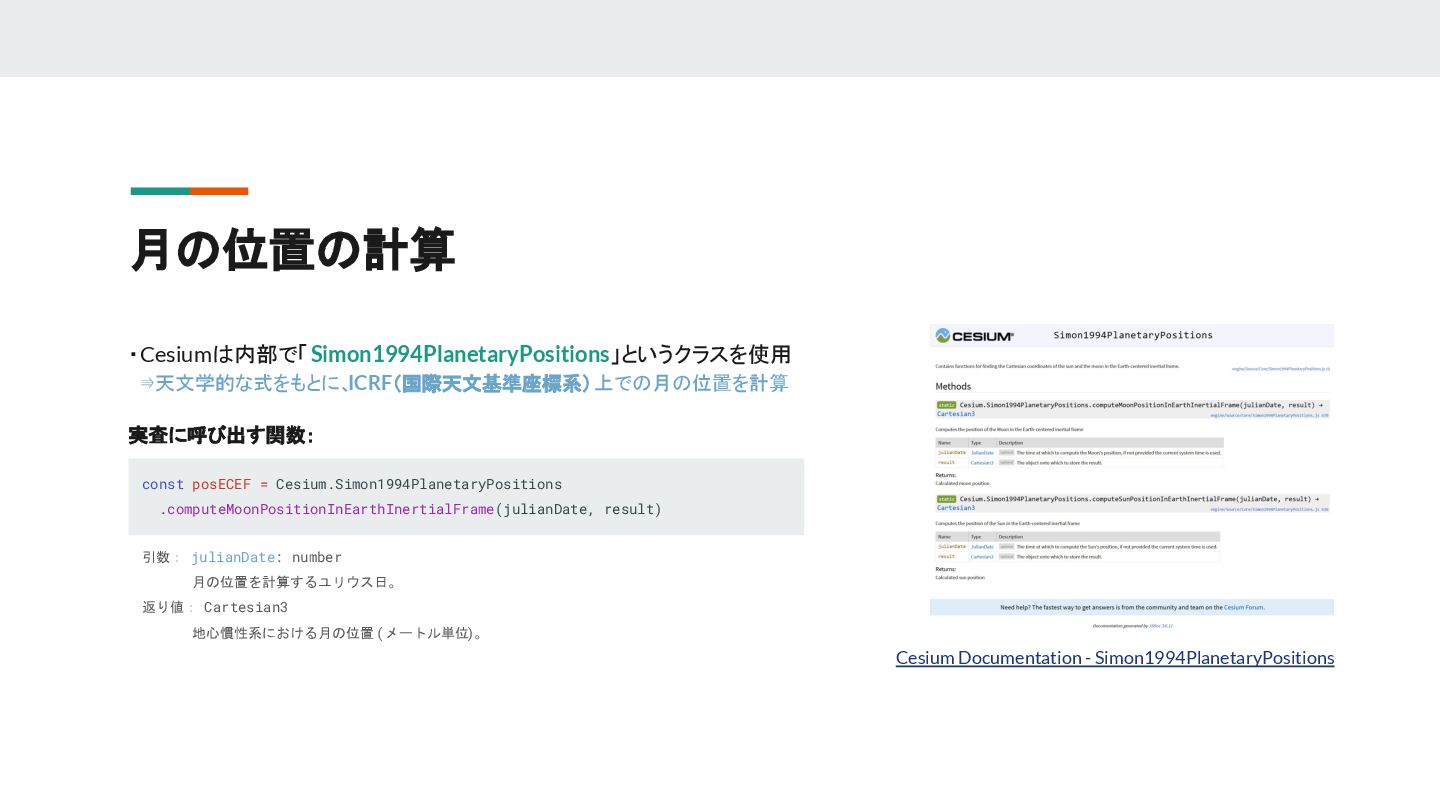
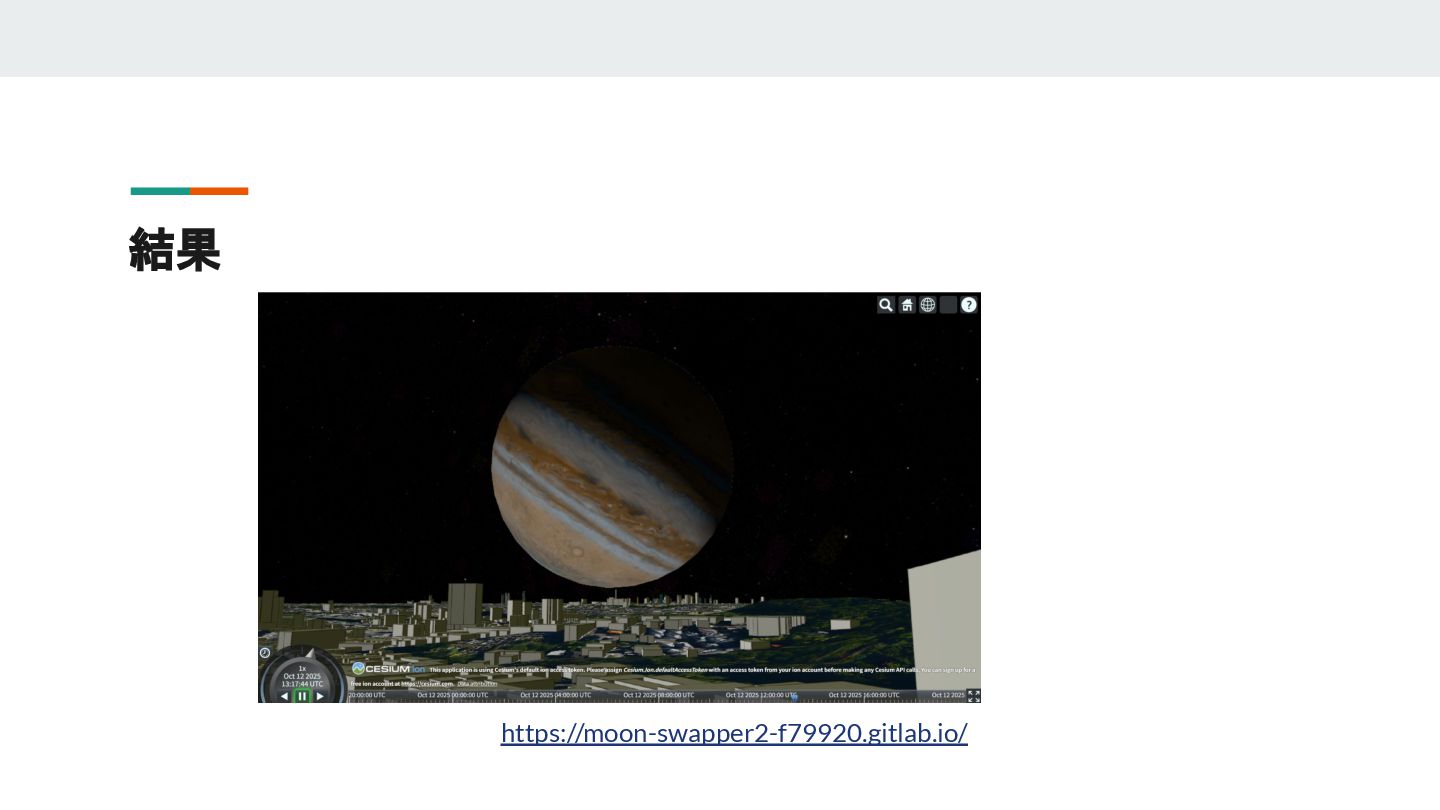
資料中のリンクは以下 ・p.5 Sandcatsle ・p.7 Cesium Documentation - Simon1994PlanetaryPositions ・p.15 https://moon-swapper2-f79920.gitlab.io/ ・p.16 https://ssd.jpl.nasa.gov/horizons/
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}