Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
iPhoneLiDARでの広域スキャン
Search
ふつーのひと
November 06, 2021
Technology
0
400
iPhoneLiDARでの広域スキャン
iPhoneLiDARで広域(500m)のスキャンをした際の知見について紹介してます。
ふつーのひと
November 06, 2021
Tweet
Share
More Decks by ふつーのひと
See All by ふつーのひと
【Unity×iPhoneLiDAR】バーチャルデスクツアーしてみた
hutwonohito
0
93
Other Decks in Technology
See All in Technology
こんなところでも(地味に)活躍するImage Modeさんを知ってるかい?- Image Mode for OpenShift -
tsukaman
1
160
Codex 5.3 と Opus 4.6 にコーポレートサイトを作らせてみた / Codex 5.3 vs Opus 4.6
ama_ch
0
190
Bedrock PolicyでAmazon Bedrock Guardrails利用を強制してみた
yuu551
0
250
Red Hat OpenStack Services on OpenShift
tamemiya
0
130
2026年、サーバーレスの現在地 -「制約と戦う技術」から「当たり前の実行基盤」へ- /serverless2026
slsops
2
260
外部キー制約の知っておいて欲しいこと - RDBMSを正しく使うために必要なこと / FOREIGN KEY Night
soudai
PRO
12
5.6k
茨城の思い出を振り返る ~CDKのセキュリティを添えて~ / 20260201 Mitsutoshi Matsuo
shift_evolve
PRO
1
360
usermode linux without MMU - fosdem2026 kernel devroom
thehajime
0
240
CDK対応したAWS DevOps Agentを試そう_20260201
masakiokuda
1
370
StrandsとNeptuneを使ってナレッジグラフを構築する
yakumo
1
120
日本の85%が使う公共SaaSは、どう育ったのか
taketakekaho
1
230
プロダクト成長を支える開発基盤とスケールに伴う課題
yuu26
4
1.4k
Featured
See All Featured
Groundhog Day: Seeking Process in Gaming for Health
codingconduct
0
94
Building AI with AI
inesmontani
PRO
1
700
The Success of Rails: Ensuring Growth for the Next 100 Years
eileencodes
47
7.9k
New Earth Scene 8
popppiees
1
1.5k
Deep Space Network (abreviated)
tonyrice
0
64
How To Stay Up To Date on Web Technology
chriscoyier
791
250k
Being A Developer After 40
akosma
91
590k
Hiding What from Whom? A Critical Review of the History of Programming languages for Music
tomoyanonymous
2
420
The Hidden Cost of Media on the Web [PixelPalooza 2025]
tammyeverts
2
190
Digital Ethics as a Driver of Design Innovation
axbom
PRO
1
180
Noah Learner - AI + Me: how we built a GSC Bulk Export data pipeline
techseoconnect
PRO
0
110
Navigating Weather and Climate Data
rabernat
0
110
Transcript
iPhoneLiDARでの広域スキャン ふつーのひと リンゴLiDARを愛する会#2
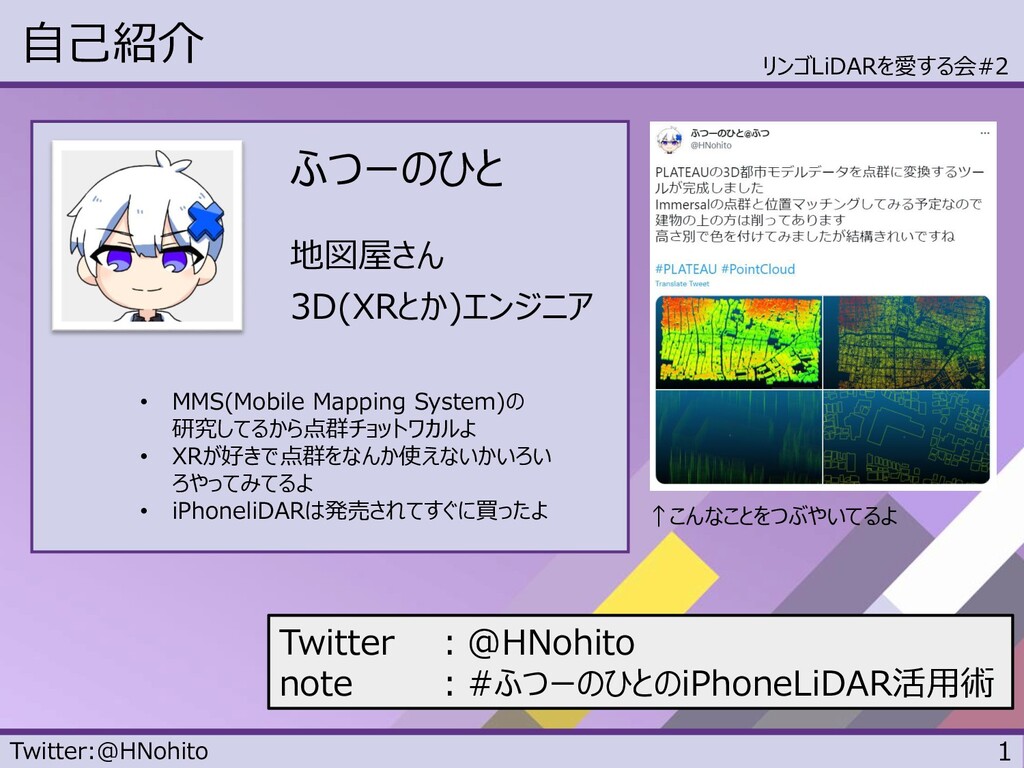
自己紹介 Twitter:@HNohito 1 リンゴLiDARを愛する会#2 Twitter :@HNohito note :#ふつーのひとのiPhoneLiDAR活用術 ふつーのひと 3D(XRとか)エンジニア
• MMS(Mobile Mapping System)の 研究してるから点群チョットワカルよ • XRが好きで点群をなんか使えないかいろい ろやってみてるよ • iPhoneliDARは発売されてすぐに買ったよ 地図屋さん ↑こんなことをつぶやいてるよ
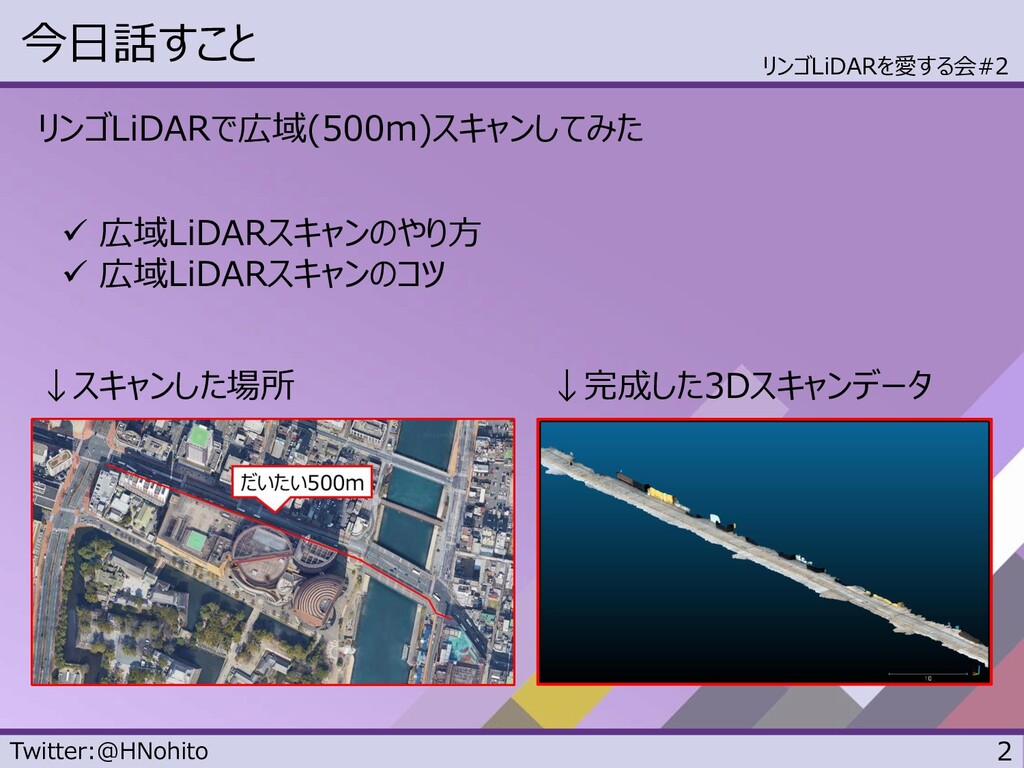
今日話すこと リンゴLiDARで広域(500m)スキャンしてみた Twitter:@HNohito 2 リンゴLiDARを愛する会#2 広域LiDARスキャンのやり方 広域LiDARスキャンのコツ ↓スキャンした場所
↓完成した3Dスキャンデータ
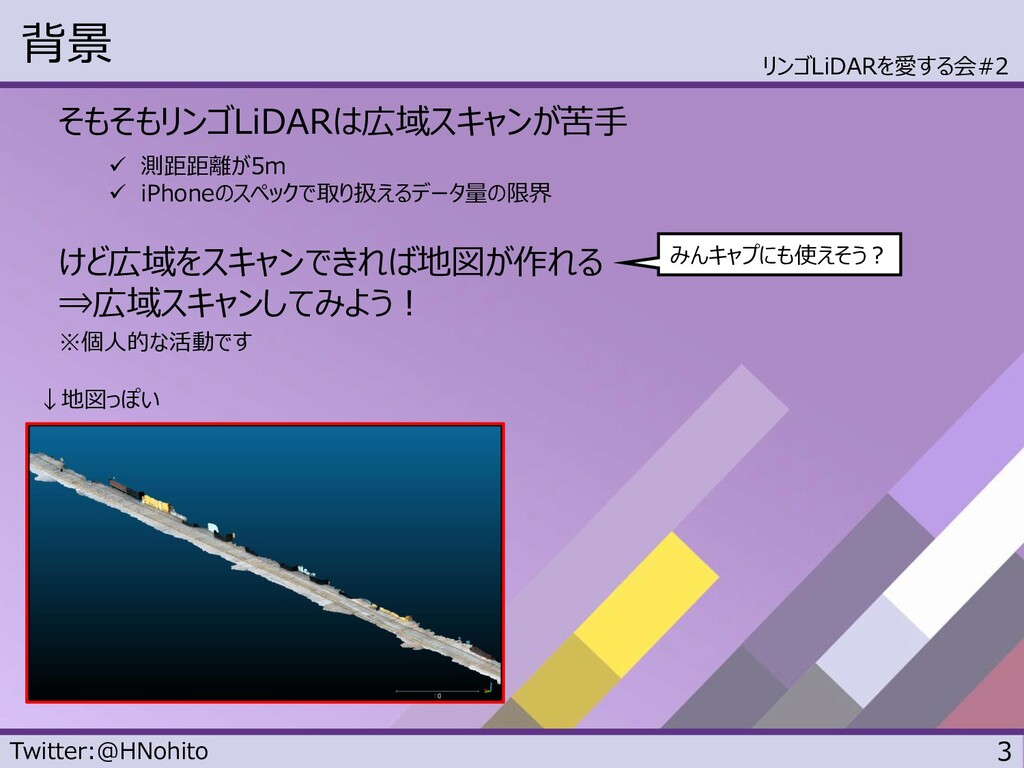
背景 そもそもリンゴLiDARは広域スキャンが苦手 Twitter:@HNohito 3 リンゴLiDARを愛する会#2 けど広域をスキャンできれば地図が作れる ⇒広域スキャンしてみよう! 測距距離が5m
iPhoneのスペックで取り扱えるデータ量の限界 ※個人的な活動です ↓地図っぽい みんキャプにも使えそう?
使用アプリ Twitter:@HNohito 4 リンゴLiDARを愛する会#2 EveryPoint (EveryPoint LiDARモード) 広域スキャンに力を入れている(気がする)アプリ
出力データは統合するときに都合がいいので点群として保存 5m以上離れた物体を スキャンする機能を積 極的に開発している
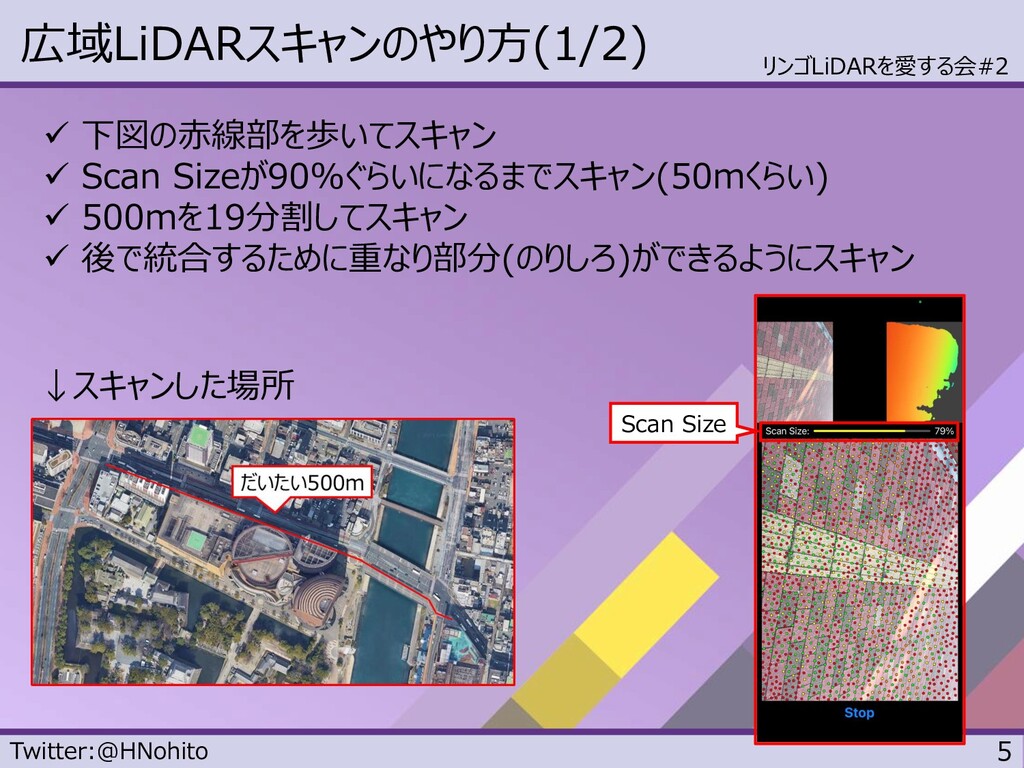
広域LiDARスキャンのやり方(1/2) Twitter:@HNohito 5 リンゴLiDARを愛する会#2 下図の赤線部を歩いてスキャン Scan Sizeが90%ぐらいになるまでスキャン(50mくらい)
500mを19分割してスキャン 後で統合するために重なり部分(のりしろ)ができるようにスキャン ↓スキャンした場所 Scan Size
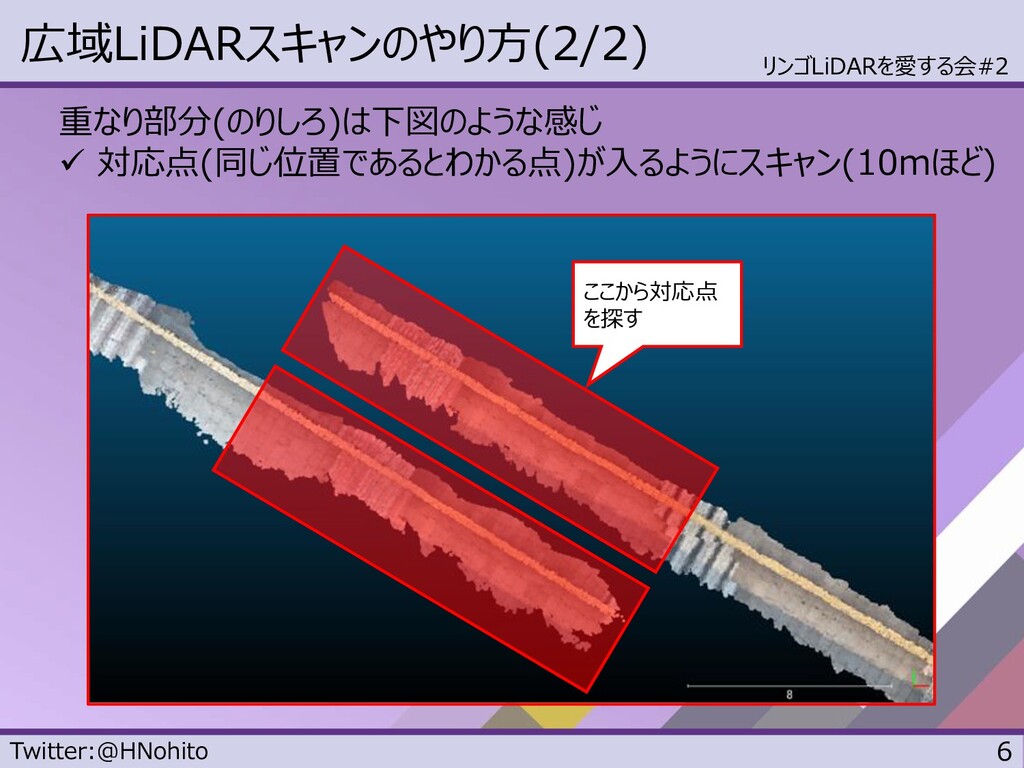
広域LiDARスキャンのやり方(2/2) 重なり部分(のりしろ)は下図のような感じ 対応点(同じ位置であるとわかる点)が入るようにスキャン(10mほど) Twitter:@HNohito 6 リンゴLiDARを愛する会#2 ここから対応点 を探す
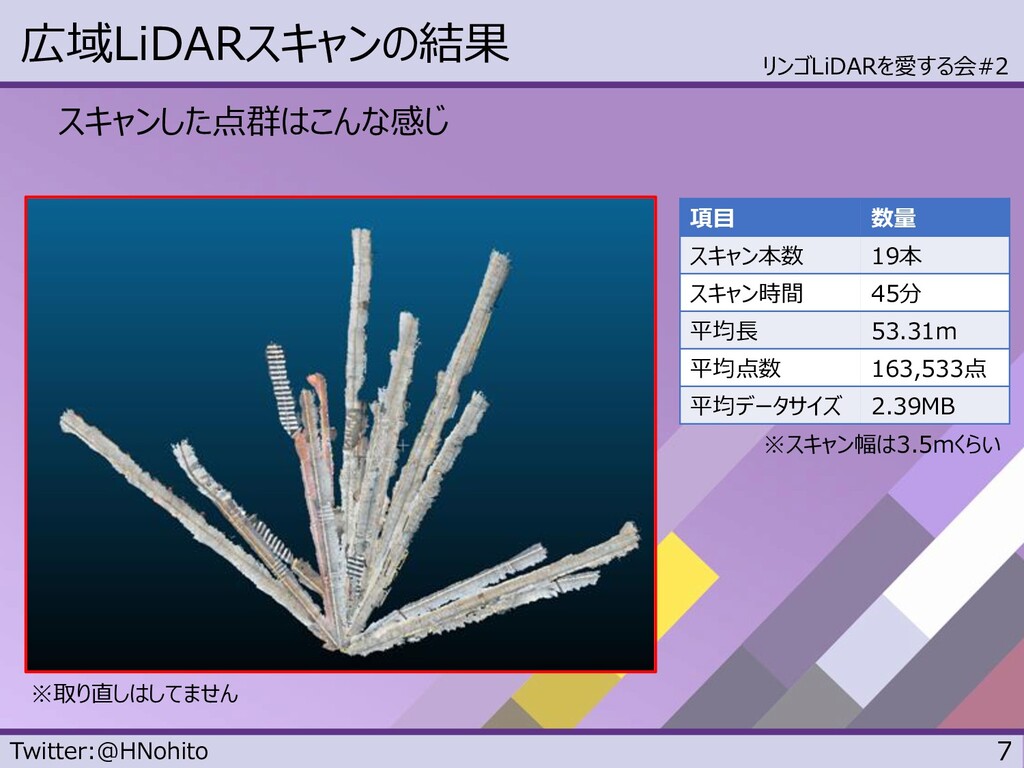
広域LiDARスキャンの結果 スキャンした点群はこんな感じ Twitter:@HNohito 7 リンゴLiDARを愛する会#2 項目 数量 スキャン本数 19本 スキャン時間
45分 平均長 53.31m 平均点数 163,533点 平均データサイズ 2.39MB ※スキャン幅は3.5mくらい ※取り直しはしてません
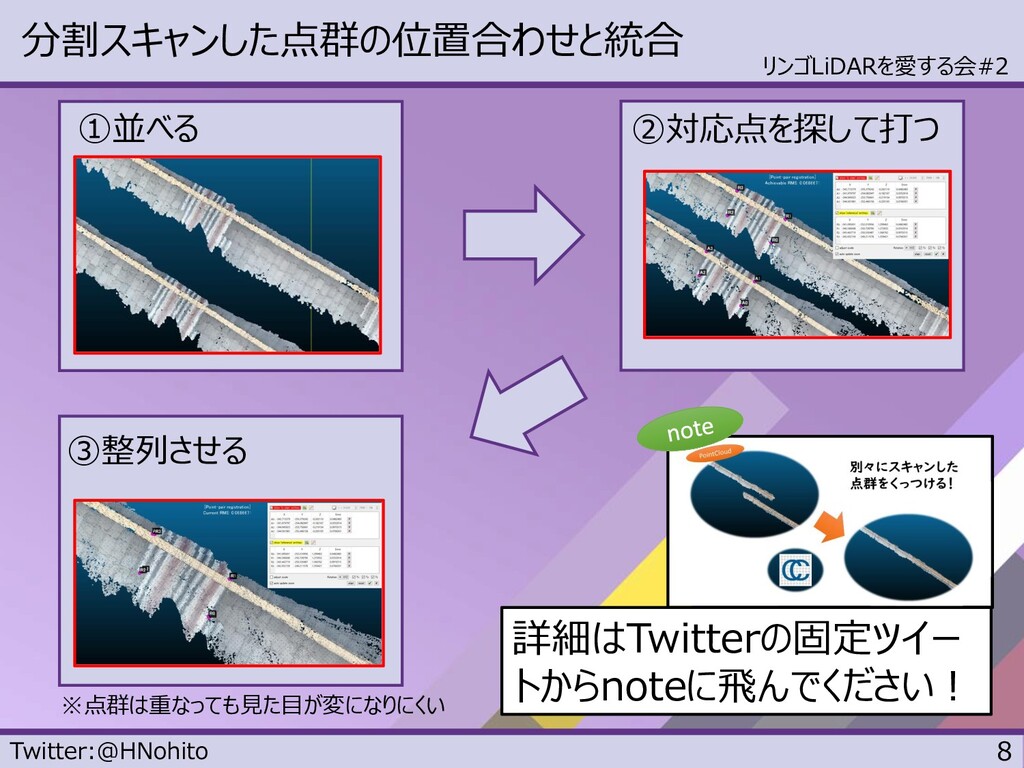
分割スキャンした点群の位置合わせと統合 Twitter:@HNohito 8 リンゴLiDARを愛する会#2 詳細はTwitterの固定ツイー トからnoteに飛んでください! ①並べる ※点群は重なっても見た目が変になりにくい ②対応点を探して打つ ③整列させる
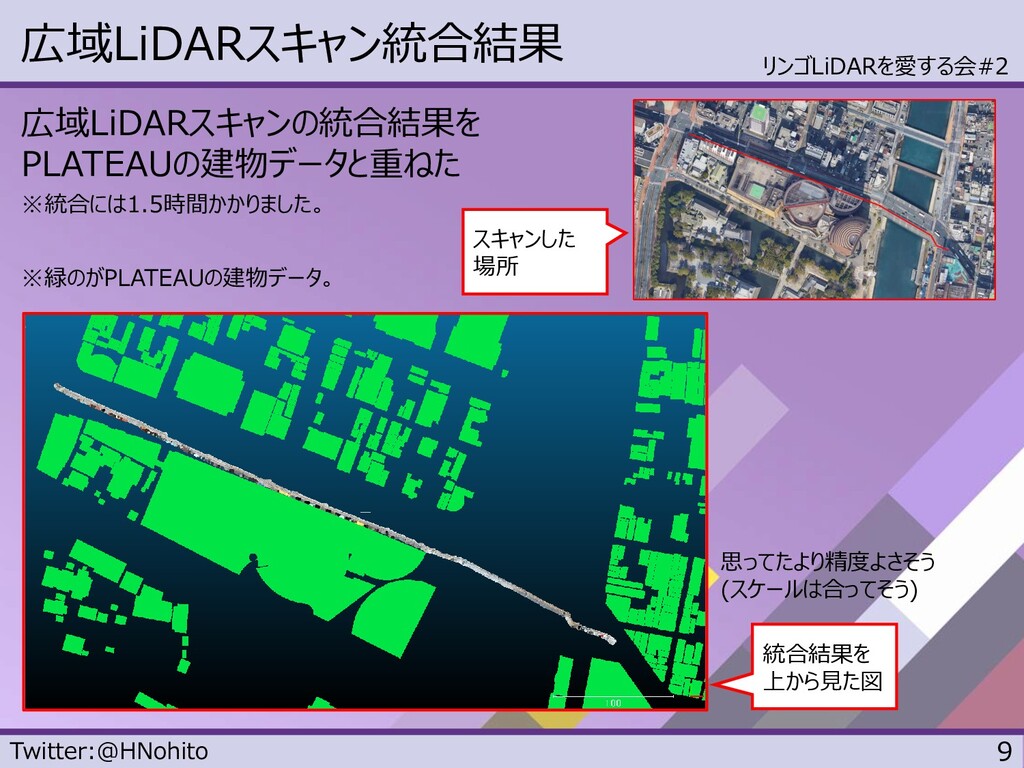
広域LiDARスキャン統合結果 広域LiDARスキャンの統合結果を PLATEAUの建物データと重ねた Twitter:@HNohito 9 リンゴLiDARを愛する会#2 思ってたより精度よさそう (スケールは合ってそう) スキャンした 場所
統合結果を 上から見た図 ※統合には1.5時間かかりました。 ※緑のがPLATEAUの建物データ。
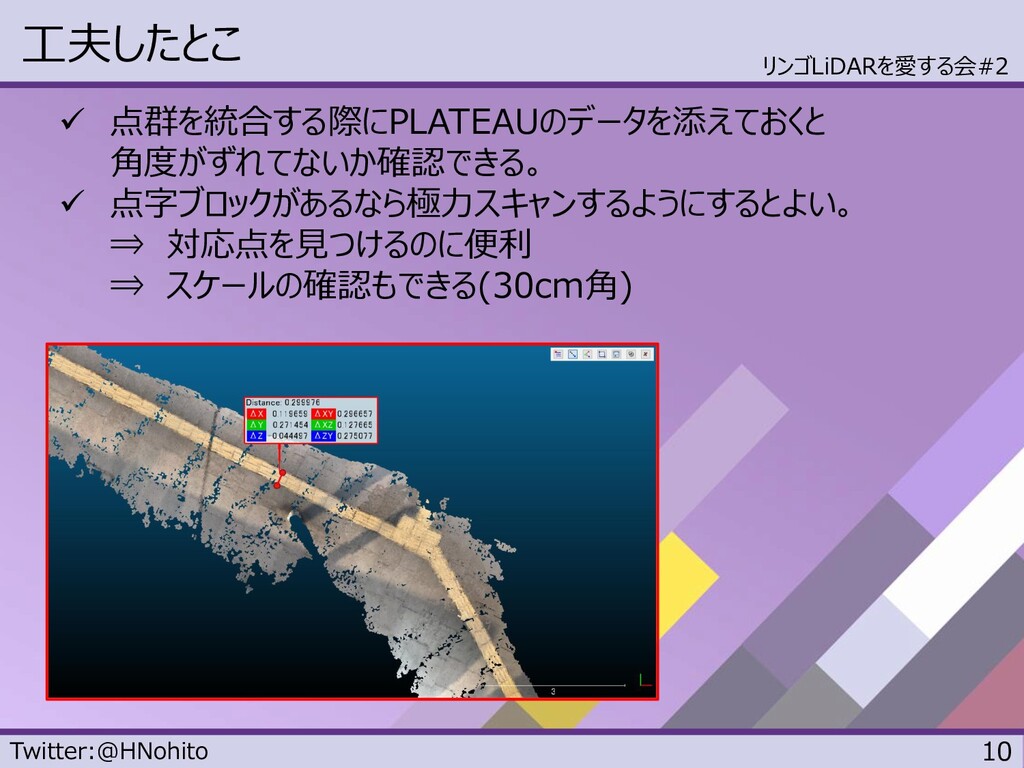
工夫したとこ 点群を統合する際にPLATEAUのデータを添えておくと 角度がずれてないか確認できる。 点字ブロックがあるなら極力スキャンするようにするとよい。 ⇒ 対応点を見つけるのに便利 ⇒ スケールの確認もできる(30cm角)
Twitter:@HNohito 10 リンゴLiDARを愛する会#2
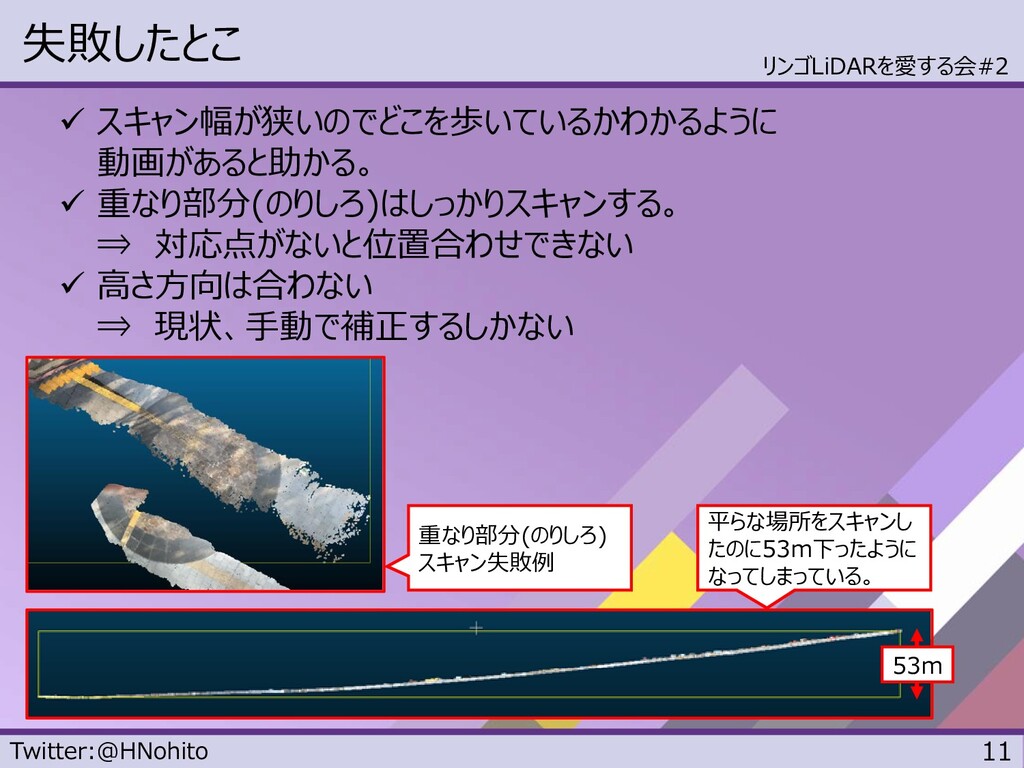
失敗したとこ スキャン幅が狭いのでどこを歩いているかわかるように 動画があると助かる。 重なり部分(のりしろ)はしっかりスキャンする。 ⇒ 対応点がないと位置合わせできない 高さ方向は合わない
⇒ 現状、手動で補正するしかない Twitter:@HNohito 11 リンゴLiDARを愛する会#2 53m 重なり部分(のりしろ) スキャン失敗例 平らな場所をスキャンし たのに53m下ったように なってしまっている。
まとめ Twitter:@HNohito 12 リンゴLiDARを愛する会#2 重なり部分(のりしろ)ができるようにスキャンすることで 位置合わせできるようにした 位置合わせ・統合した点群はスケールと水平方向は 結構精度がよさそう
高さ方向は手動補正が必要 結果 次やりたいこと リンゴLiDARで広域(500m)スキャンしてみた 建物を含めた3Dスキャンデータの作成 Scaniverseの位置情報付き点群データ出力 高さ方向の補正方法の検討
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}