Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Haritoraのような安価なIMUモーキャプの特性と考慮点について
Search
izm
June 11, 2021
Programming
13k
1
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Haritoraのような安価なIMUモーキャプの特性と考慮点について
トラッキング技術勉強会
https://connpass.com/event/214152/
izm
June 11, 2021
More Decks by izm
See All by izm
Face recognition for Luppet, for xR Tech Nagoya #4
izm
3
8.5k
Unity Networking Libraries Overview2018
izm
4
5.7k
Unity MovieTexture (VR panorama) tips
izm
6
8.8k
Other Decks in Programming
See All in Programming
The Past, Present, and Future of Enterprise Java
ivargrimstad
0
450
Build-to-own AI: Agentic Development for Humans
inesmontani
PRO
0
130
<title><a id="</title>君はこのHTMLをパースできるか"></a></title> #雑LT_study
pizzacat83
0
120
SREの積み重ねがAI駆動開発のガードレールになった ― 7つの実践/SRE Guardrails The 7
tomoyakitaura
9
5.8k
jsmini JavaScript Engine を作ってみた話
yosuke_furukawa
PRO
0
270
Terraform標準の組織で AWS CDKをどう使うか
mu7889yoon
1
440
TSX の <Hoge<Fuga>> という構文に驚いた話 / tsx-type-argument-syntax
kanaru0928
0
140
「寝てても仕事が進む」Claude Codeで組む第二の脳
tomoyafujita2016
0
210
PHPだって関数型したい 〜できること、できないこと〜 / fp-in-php
jsoizo
1
260
ここ半年くらいでAIに作らせたR用ツール
eitsupi
0
340
AI時代、エンジニアはどう育つのか -未経験エンジニアの成長を間近で見て考えたこと-
thasu0123
0
200
数百円から始めるRuby電子工作
tarosay
0
120
Featured
See All Featured
Save Time (by Creating Custom Rails Generators)
garrettdimon
PRO
32
4k
Documentation Writing (for coders)
carmenintech
77
5.4k
BBQ
matthewcrist
89
10k
The State of eCommerce SEO: How to Win in Today's Products SERPs - #SEOweek
aleyda
2
11k
Build The Right Thing And Hit Your Dates
maggiecrowley
39
3.4k
Hiding What from Whom? A Critical Review of the History of Programming languages for Music
tomoyanonymous
3
1.1k
Google's AI Overviews - The New Search
badams
0
1.1k
Tell your own story through comics
letsgokoyo
1
1k
技術選定の審美眼(2025年版) / Understanding the Spiral of Technologies 2025 edition
twada
PRO
118
120k
Sharpening the Axe: The Primacy of Toolmaking
bcantrill
46
2.9k
Designing Powerful Visuals for Engaging Learning
tmiket
1
470
Practical Tips for Bootstrapping Information Extraction Pipelines
honnibal
25
2k
Transcript
Haritoraのような安価なIMU式 モーションキャプチャの特性と考慮点について @izm スライドは後日公開予定
挨拶 • 趣味でHaritoraというプロジェクトをやってる@izmです。 • フルトラ民主化しようとしたら戦国時代になってしまった… ◦ →選択肢がいっぱいあるのはとても良い!切磋琢磨で健全な市場になるので • 注意:本発表はHaritoraのポジショントークが含まれます Haritoraはいいぞ!
↑ポジショントークの例
宣伝 • Haritoraの量産後継機であるHaritoraXを株式会社 Shiftallさんと業務提携して進めています。 • オーダー受付中 ( https://ja.shiftall.net/archives/product_page/haritorax/ ) 買って!
目次 • IMU式モーションキャプチャの概要と特性 • Haritoraの話 • 良いIMUモーキャプかどうかの見分け方 全部で3個!
IMUモーキャプの概要と特性
IMUとは • 姿勢(角度)が取得できるセンサを1個以上積んだ物 ◦ 例:加速度センサ、ジャイロセンサ、地磁気センサの組み合わ せ • 位置は取得できない • ViveTrackerやOculusTouchも中にIMUが入っています
• リングフィットアドベンチャーで使ってる仕組み!
Sensor Fusion • ジャイロセンサ(角速度)加速度センサ(加速度)地磁気センサ (地磁気)を組み合わせて、あるべき姿勢を導き出す ◦ ジャイロセンサ:角速度が取れるので積分したら角度が取れる ◦ 加速度センサ:静止していたら重力の9.8Gを元にお辞儀している量が分か る
◦ 地磁気センサ:地球の地磁気をベースに姿勢が分かる • ↑これらを組み合わせて正しそうな姿勢を求めるSensorFusion ◦ この説明だけで60分くらいかかるので省略
IMU式モーションキャプチャ • IMUを体のあちこちにつけて、SensorFusionにより、取 り付けた関節の姿勢がわかる • Forward Kinematics(順運動学)によって人体の姿勢を 求める
姿勢計算の具体例 腰:(30,0,0) 左もも (90,-10,0) 左すね(10,10,0) 単位は度
いくつか気にする事 • IMUが人の体に斜めに取り付けられたりするのを吸収 • IMUの姿勢が電源投入時にリセットされる物の場合はこ のオフセットも計算する • これらを吸収するためにユーザに幾つかのポーズを取っ てもらう
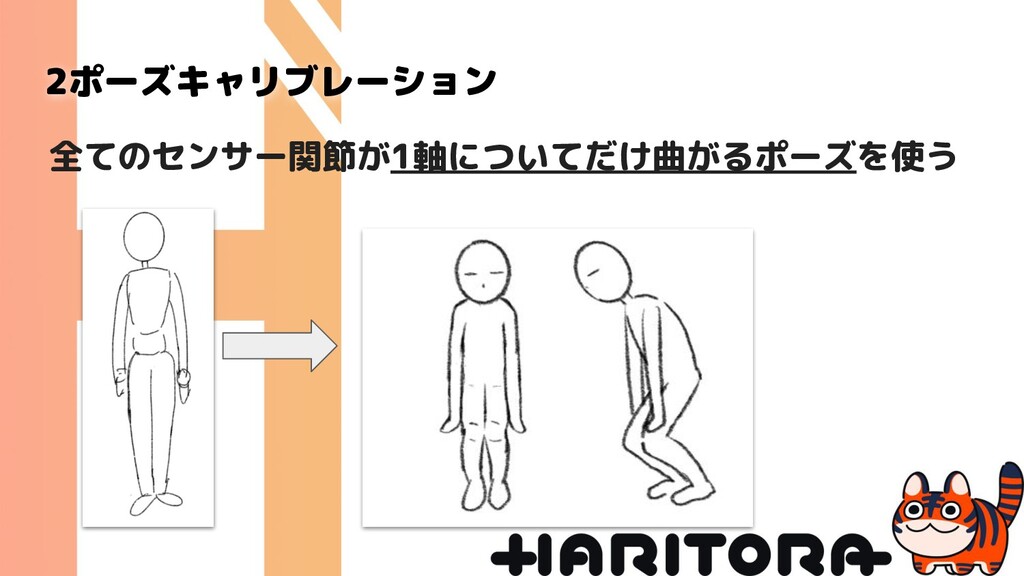
2ポーズキャリブレーション 全てのセンサー関節が1軸についてだけ曲がるポーズを使う
IMU式モーションキャプチャ • Rootから末端に行くにつれて、姿勢推定誤差の蓄積で誤 差が出てくる • 歩いて移動した距離、を求めるのは大変(よくあるのが 足の加速度を計測して歩行を推定しておく仕組み) • 市販のIMU式モーションキャプチャも絶対位置を補正す る仕組みをオプションで備えがち
IMU式モーションキャプチャの利点 • PC側の計算コストが軽い • 遮蔽に強い • 素朴に実装しても複雑骨折しにくい ◦ toBの生配信においてキャラクターが複雑骨折するとクビが飛ぶ ◦
とはいえ、磁気ノイズの影響で突如首がクルンと回ることもある ▪ トラスの上の収録とか ▪ あなたが手に持ったマイク、地磁気ノイズの塊ですよ!!
IMU式モーションキャプチャの欠点 • 絶対位置が取れない • ドリフトが起きる ◦ ドリフト=時間蓄積による姿勢推定誤差 ◦ ドリフトが起きないIMUはメチャンコ高いです ◦
民生品だと大体30分-1hくらいで最低1度以上ズレるはず
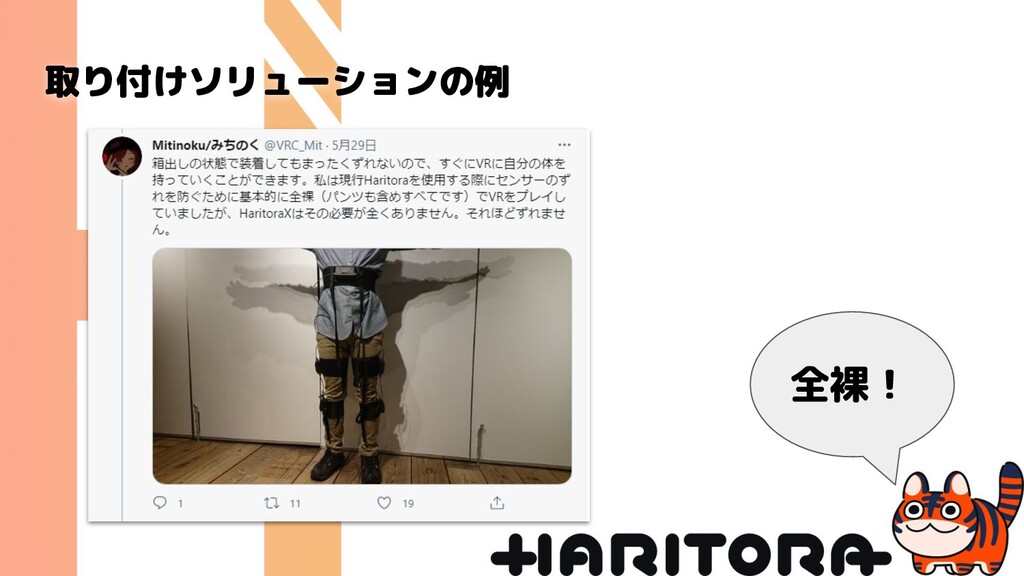
IMUモーションキャプチャの人体装着方法 • 誤差の蓄積によるドリフト以外に「体に取り付けたセンサが ズレた」という誤差もある • 各社工夫しています • リングフィットアドベンチャーでさえ、ジャージの上から取 り付けると太ももから滑り落ちます •
全身タイツが一番安定します • 人体各所に3脚のねじ穴が空いていてほしい!!!
取り付けソリューションの例 全裸!
取り付けソリューションの例 オシャレ!
Haritoraの話
Haritoraの仕組み • 上半身は3点トラッキングが普及している(最高) • 下半身の腰と足だけIMU式でキャプチャしたい • 3点、5点、6点、8点あたりが検討に入る
3点式 • KAT Locoが実用化 • 太ももと腰に取り付け • スネや足首は推定、実際違和感はある • 一方でDeep
Inertia Poser,など機械学習ベースで推定す る仕組みもある ◦ (計算コストが上がるのでトレードオフ)
5点式 • 腰に1個、足に2個づつ • WalkOVRおよびHaritora,HaritoraXが採用 ◦ 足首は諦める ◦ 腰と胸、みたいに2個付けた方が正確ではある(Unityの HumanoidのSpineBoneが2個以上という制約には意味がある)
6点式 • Uni-motion,SlimeVRが採用 • 5点式に加えて、腰またはみぞおちにもう1個追加 • お辞儀をしたとき、腰はほぼまっすぐだけど、みぞおち は傾いてる、みたいな再現度が上がる
8点式 • 6点に加えて両足首にもセンサーをつける • 足首の加速度センサにより歩行の足踏み検知がしやすい ので、IMUだけで全身モーキャプするなら足首センサは ほぼ必須 • 表現力と装着コストのトレードオフ 良いなあ
Haritoraの5点式 • 腰センサーはみぞおちにマウントする • 6点式なら腰にあるはずのIMUの姿勢を根性で計算によっ て求める ◦ 人間の背骨Spine1とSpine2は連動してる ◦ なので「大体みぞおちがこの姿勢だったら腰センサーはこんな
姿勢」みたいな推定が割と可能 ◦ ver0.2.2より実装済み
None
良いIMUモーキャプの見分け方
IMUモーキャプ買う時注意:これだけ覚えて帰って下さい • その場から歩いているリアルタイム動画が無いものは全 部ダメ • ドリフトに言及していないものは全部ダメ • 開発者にオタクがいないプロジェクトは全部ダメ(これ はポジショントークです)
IMU式モーションキャプチャの大事ポイント • IMU式モーションキャプチャ「も」ソフトウェアの出来 が大事 • 特にセンサーファームウェアや、PC側の骨格推定アルゴ リズムが大事
みんなも作ろうIMU式モーションキャプチャ • IMUをいっぱい繋げたハードウェアを作ってから先が めっちゃ面白い • ハンダ付けもめっちゃ面白い • みんなも作ってみよう
終わり
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}