variance model structure can change depending on FPC k Let score variance depend on subject and covariates. var( ⇠ijk |wijk, zijk, gik) = exp k0 + q X m=1 kmwijkm + r X h=1 gikhzijkh ! k|wijk,zijk,gik
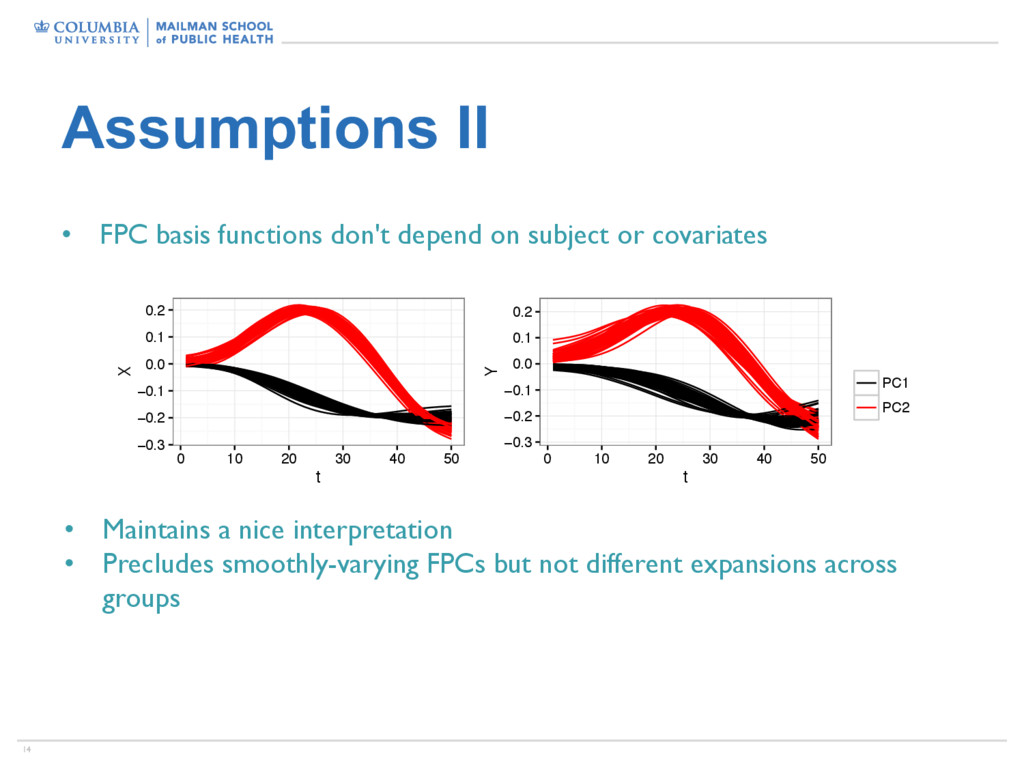
subject or covariates • Maintains a nice interpretation • Precludes smoothly-varying FPCs but not different expansions across groups −0.3 −0.2 −0.1 0.0 0.1 0.2 0 10 20 30 40 50 t X −0.3 −0.2 −0.1 0.0 0.1 0.2 0 10 20 30 40 50 t Y PC1 PC2
(Chiou et al 2003) • Implies some covariate dependence in the variance, but mostly focuses on the mean • Allow complete covariance to be covariate dependent (Jiang and Wang 2010) • Non-constant FPCs are harder to interpret • Difficult to posit complex models
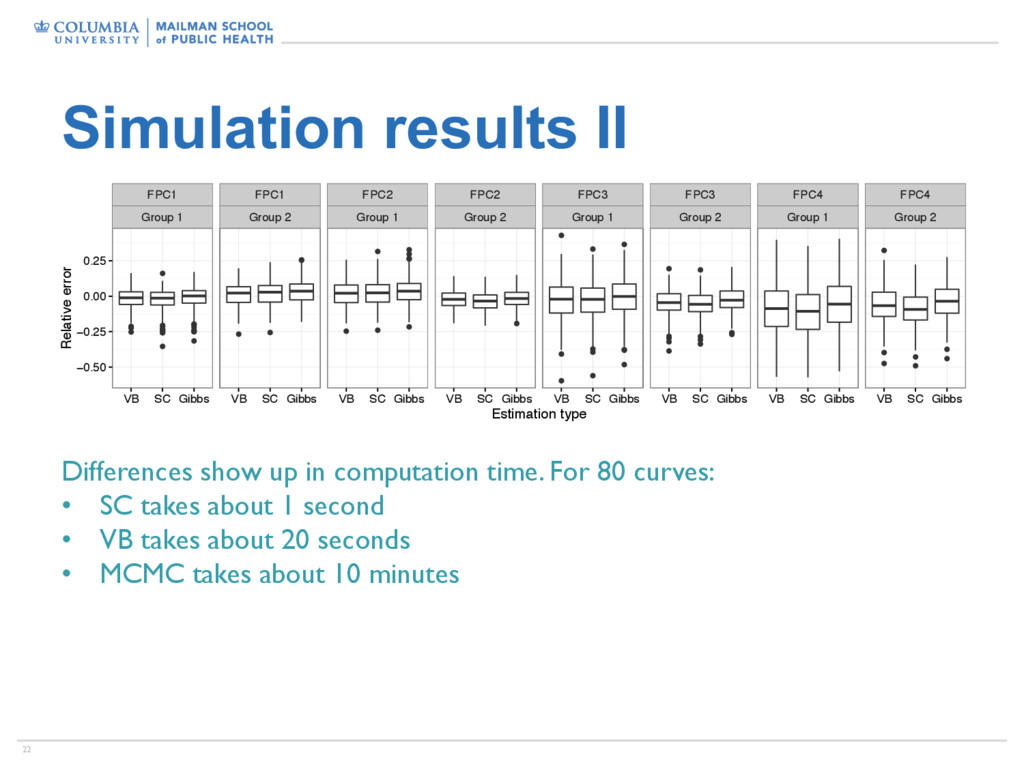
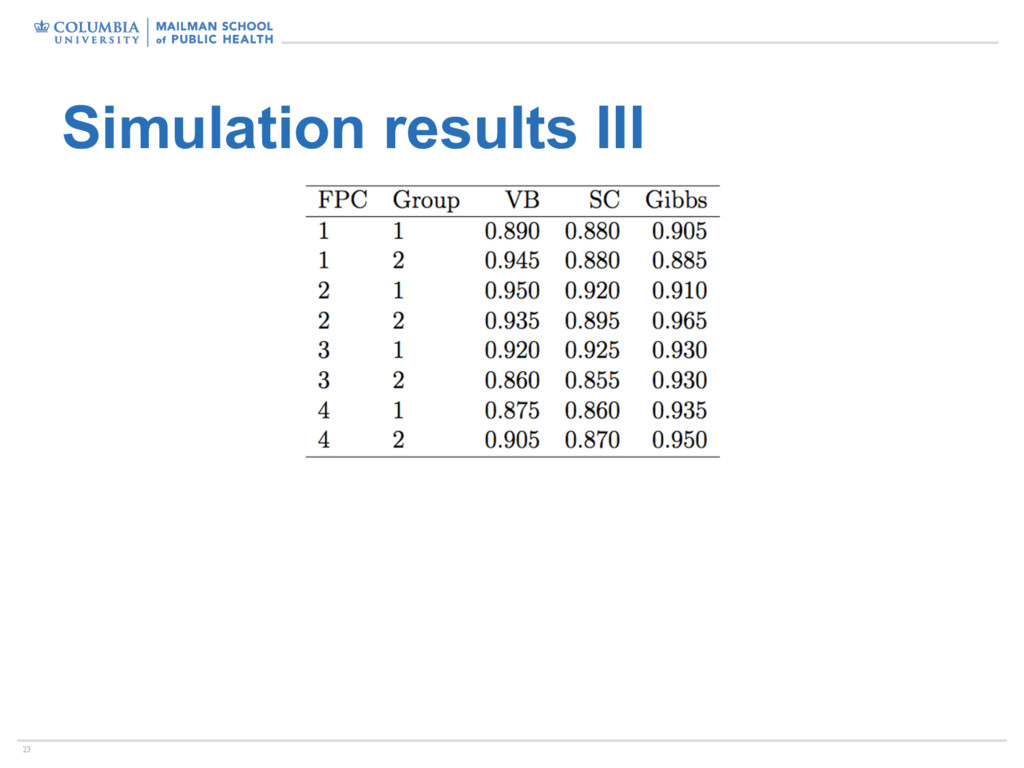
score estimation + score variance model • Probabilistic / Bayesian FPCA • Variational Bayes • MCMC Advantages and disadvantages for each We tried each and compared in simulations
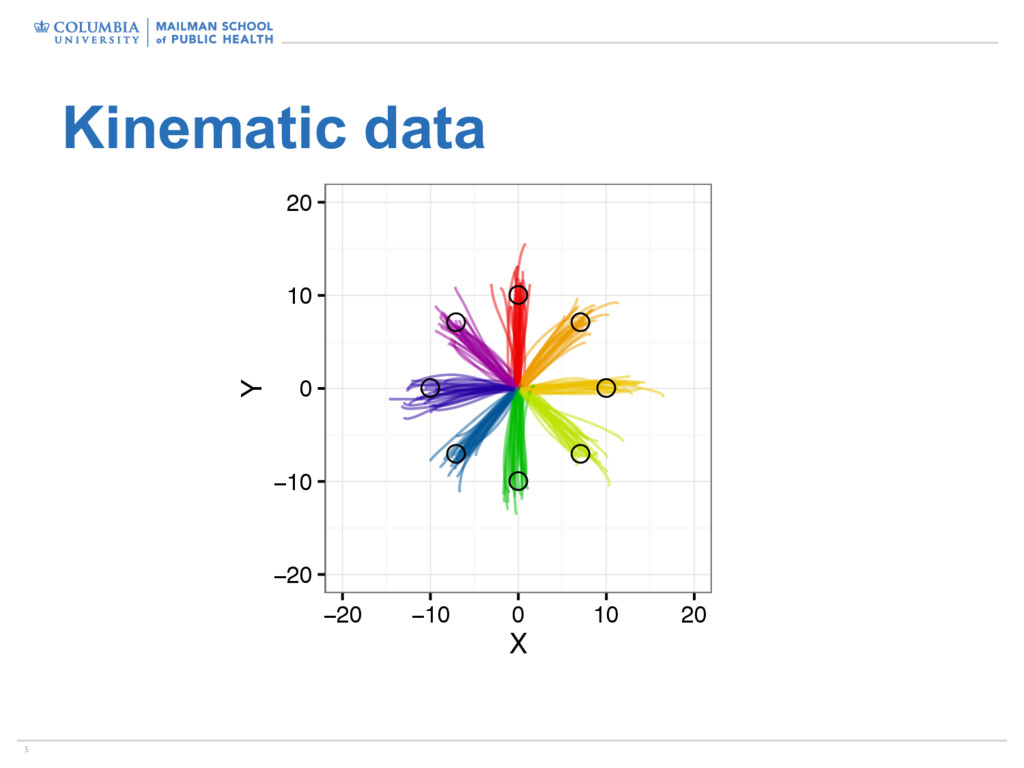
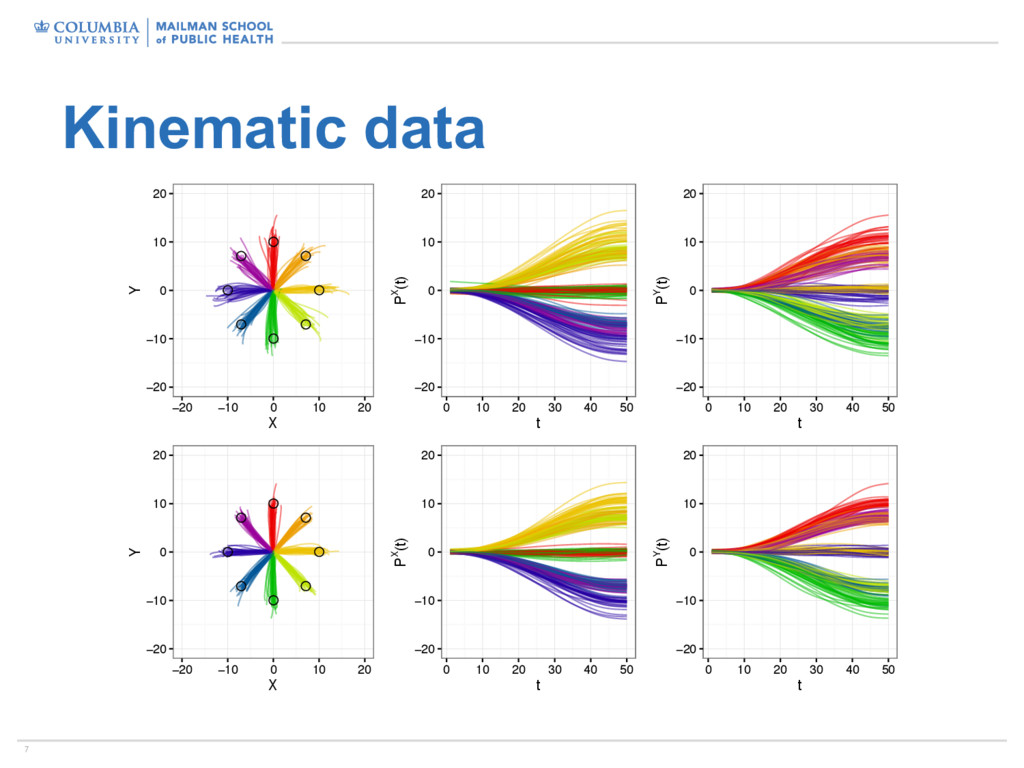
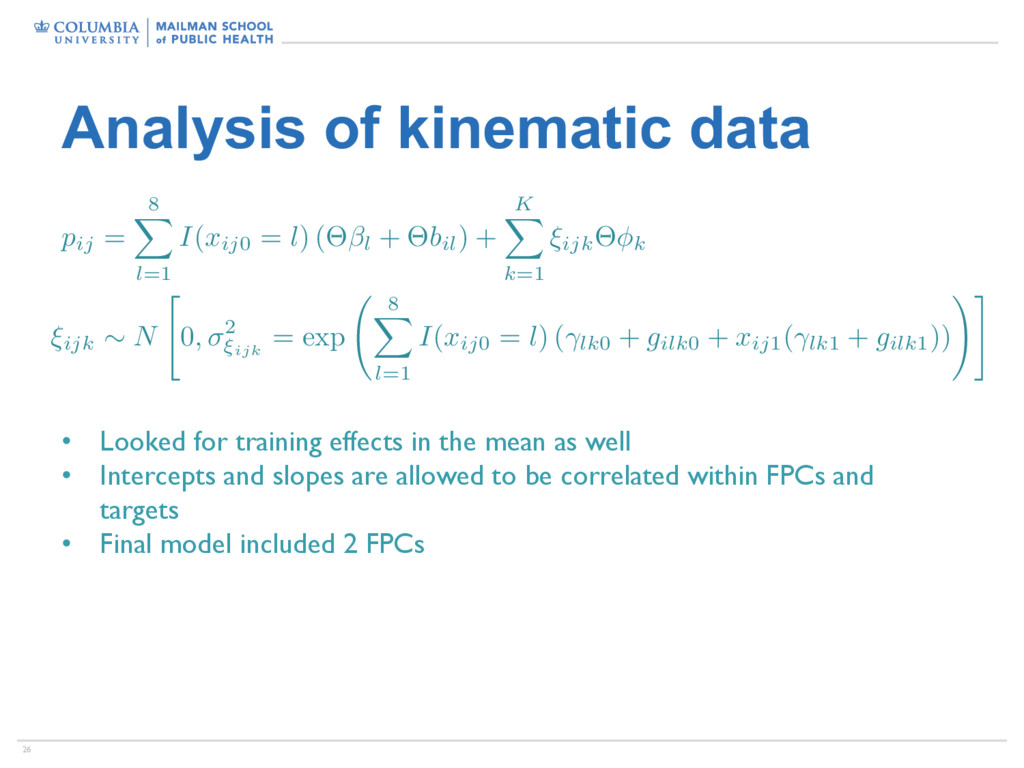
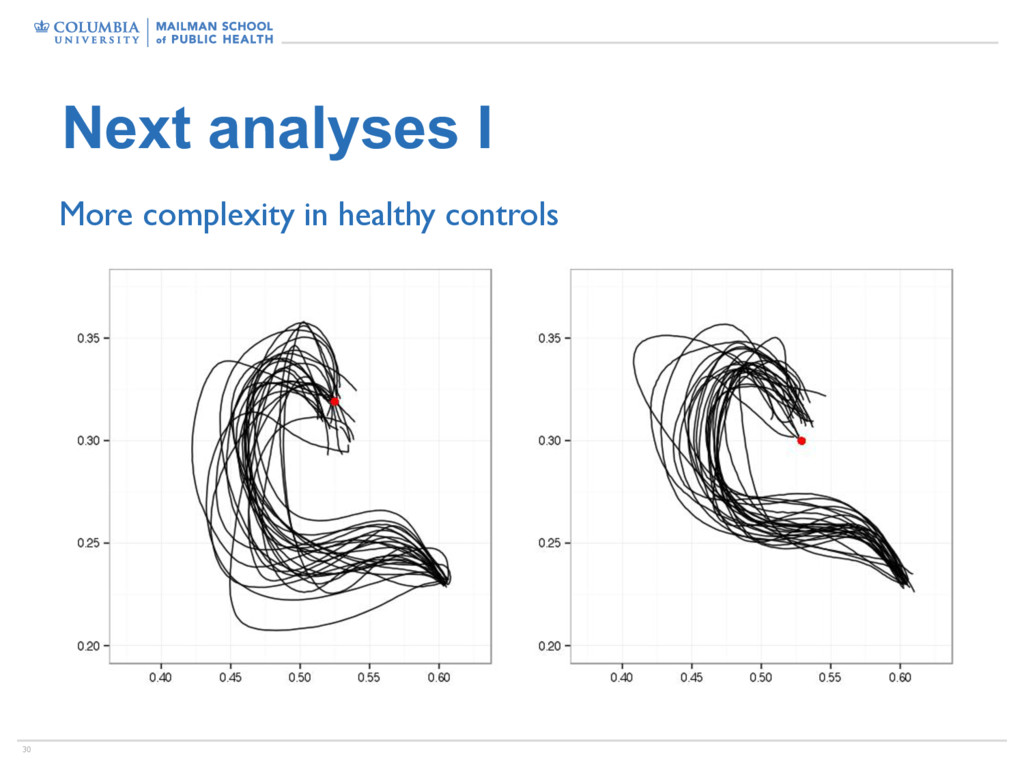
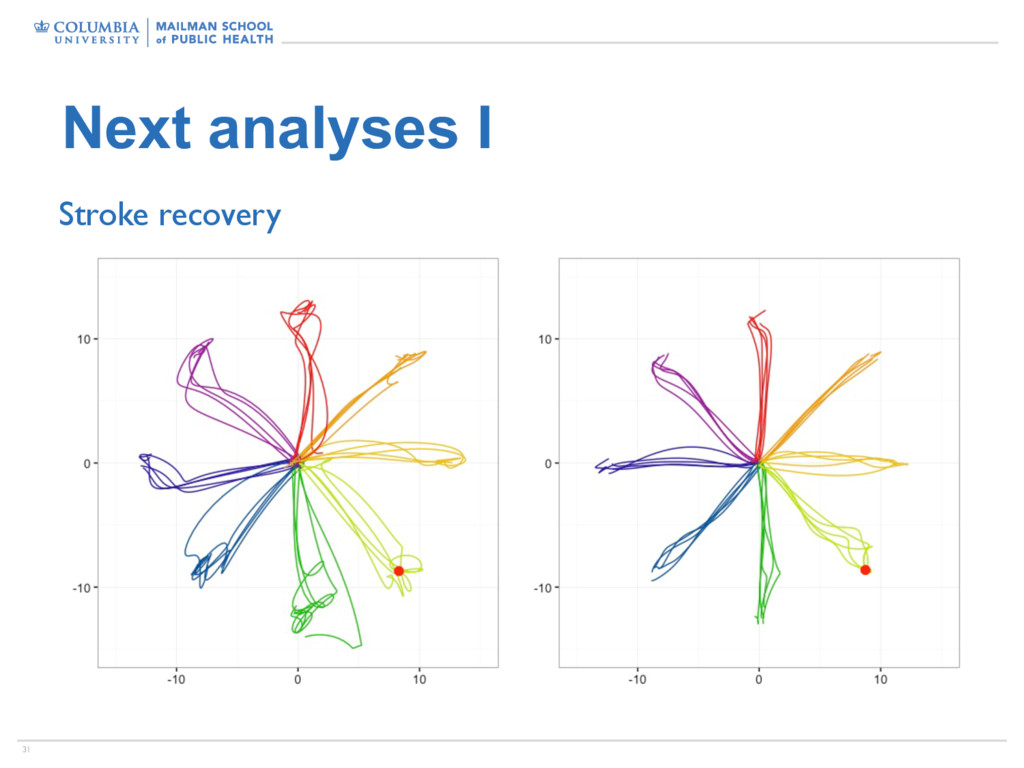
number • Allow separate effects for each target • Include subject-specific random intercepts and slopes for each target Prior to analysis, curves are rotated to lie on the positive X axis • Variation in X direction relates to extent • Variation in Y direction relates to direction
in the mean as well • Intercepts and slopes are allowed to be correlated within FPCs and targets • Final model included 2 FPCs pij = 8 X l=1 I(xij0 = l) (⇥ l + ⇥bil) + K X k=1 ⇠ijk⇥ k ⇠ijk ⇠ N " 0, 2 ⇠ijk = exp 8 X l=1 I(xij0 = l) ( lk0 + gilk0 + xij1( lk1 + gilk1)) !#
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![33 Thanks! • [email protected] • jeffgoldsmith.com • github.com/jeff-goldsmith/](https://files.speakerdeck.com/presentations/1835ecd71b5a4054bf4e92034bfa2c9f/slide_32.jpg){kind=link}