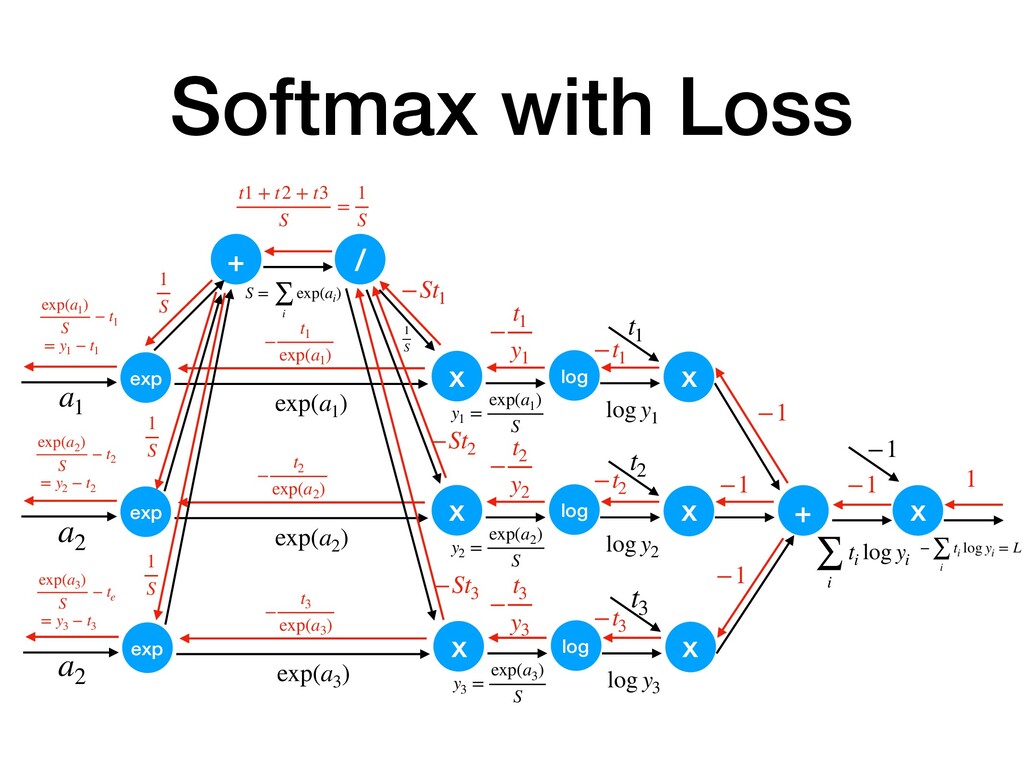
log x + x −∑ i ti log yi = L S = ∑ i exp(ai ) 1 S y1 = exp(a1 ) S log y1 t1 exp a2 exp(a2 ) x log x y2 = exp(a2 ) S log y2 exp a2 exp(a3 ) x log x y3 = exp(a3 ) S log y3 t2 t3 ∑ i ti log yi −1 1 −1 −1 −1 −1 −t1 −t2 −t3 − t1 y1 − t2 y2 − t3 y3 −St1 −St2 −St3 t1 + t2 + t3 S = 1 S 1 S 1 S 1 S exp(a1 ) S − t1 = y1 − t1 − t1 exp(a1 ) − t2 exp(a2 ) − t3 exp(a3 ) exp(a2 ) S − t2 = y2 − t2 exp(a3 ) S − te = y3 − t3
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}