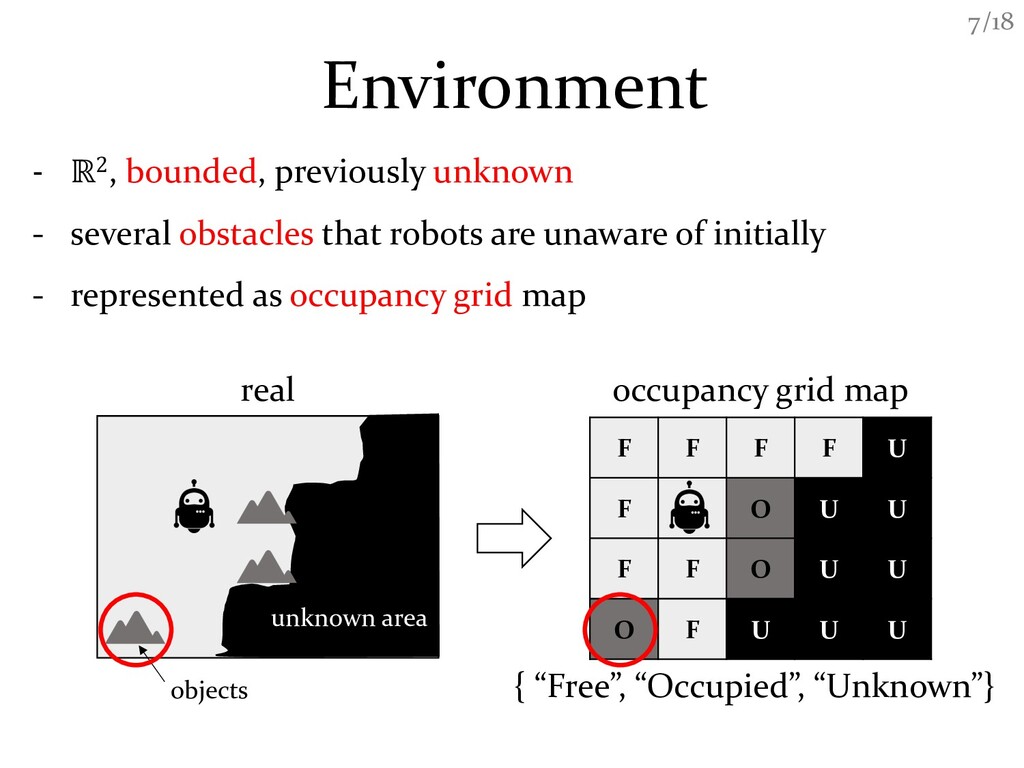
obstacles that robots are unaware of initially - represented as occupancy grid map F F F F U F O U U F F O U U O F U U U occupancy grid map { “Free”, “Occupied”, “Unknown”} real unknown area objects
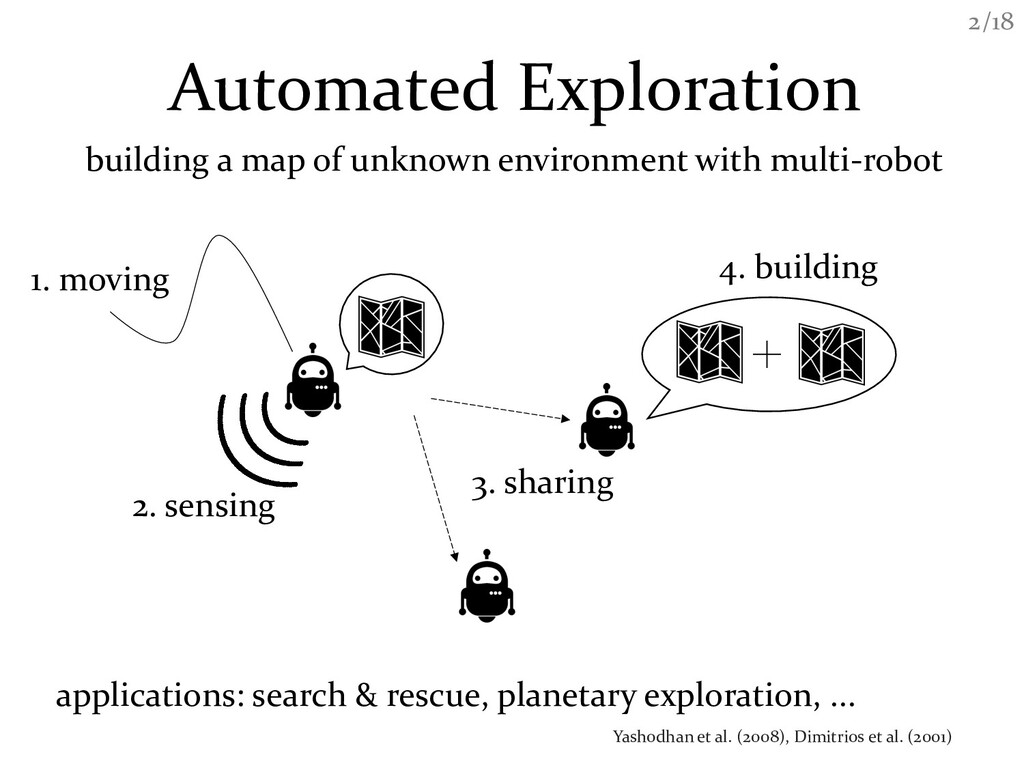
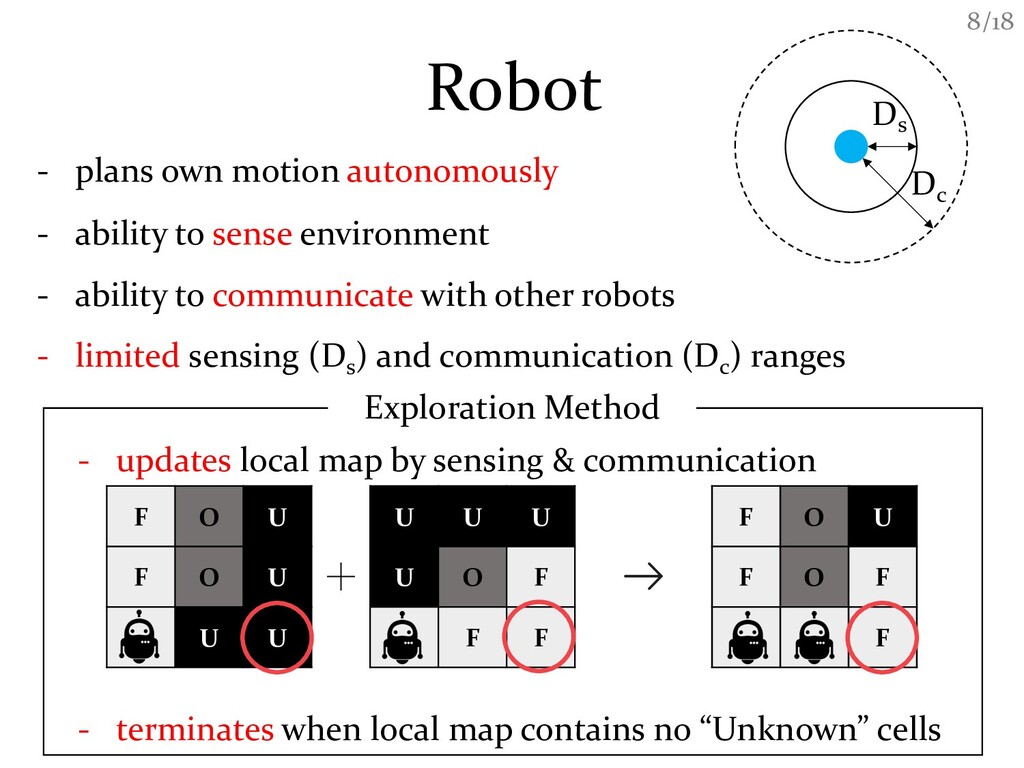
- ability to sense environment - ability to communicate with other robots - limited sensing (Ds ) and communication (Dc ) ranges Exploration Method - updates local map by sensing & communication F O U F O U U U U U U U O F F F F O U F O F F - terminates when local map contains no “Unknown” cells
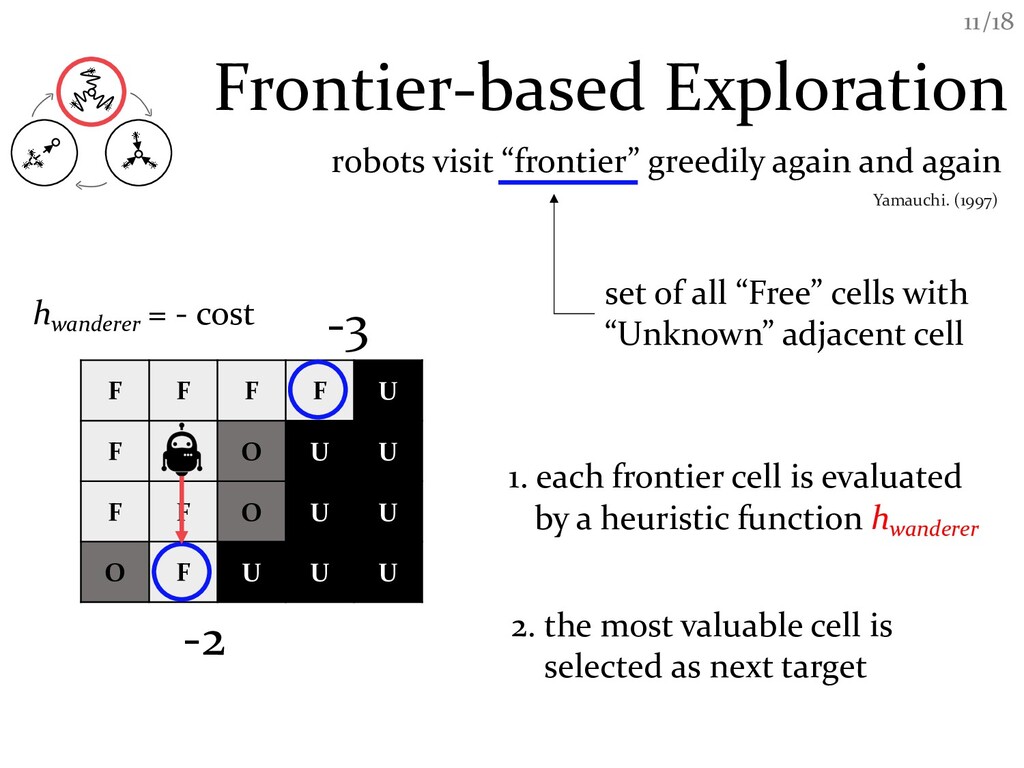
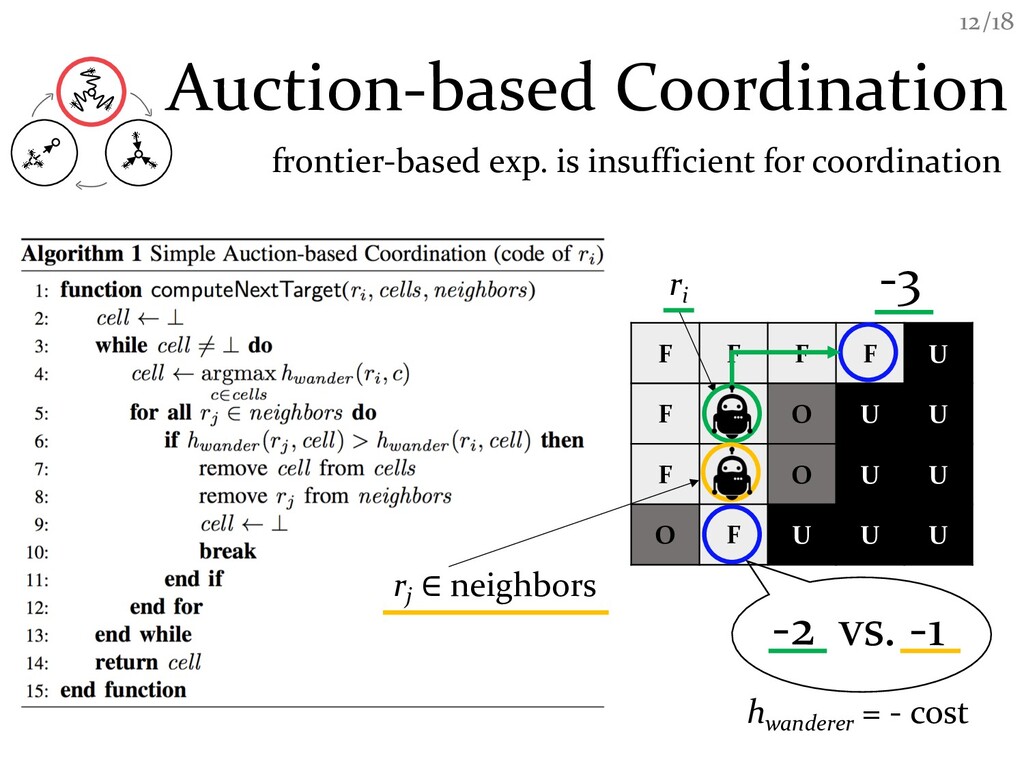
O U U F F O U U O F U U U robots visit “frontier” greedily again and again Yamauchi. (1997) 1. each frontier cell is evaluated by a heuristic function hwanderer hwanderer = - cost -2 -3 2. the most valuable cell is selected as next target set of all “Free” cells with “Unknown” adjacent cell
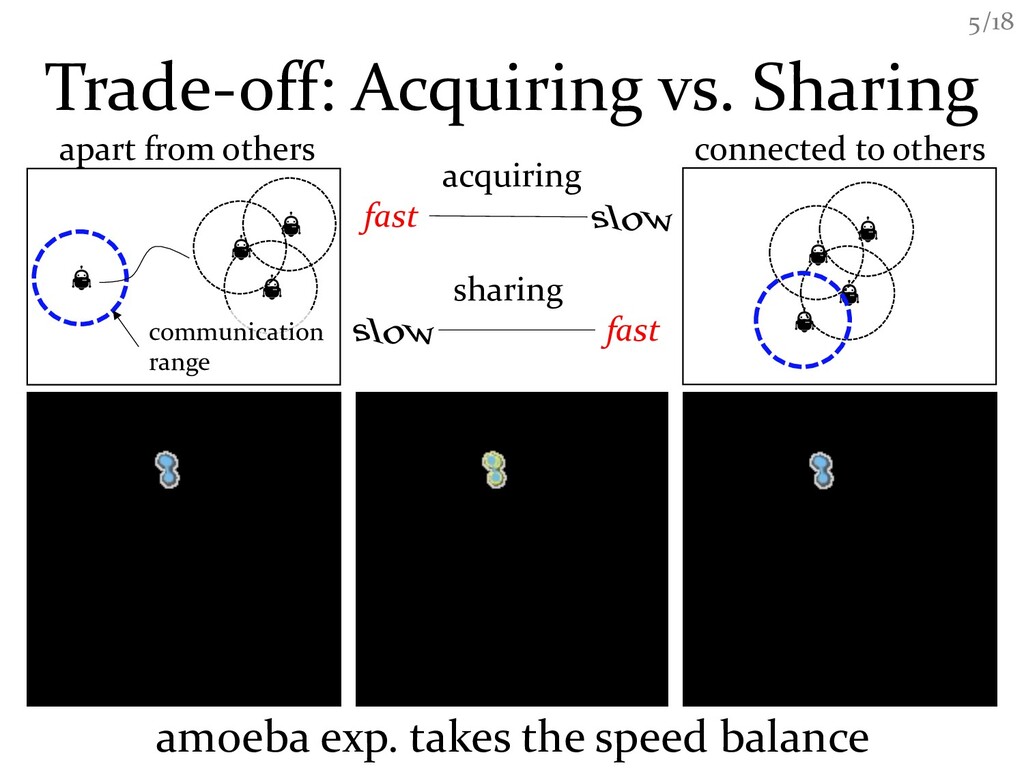
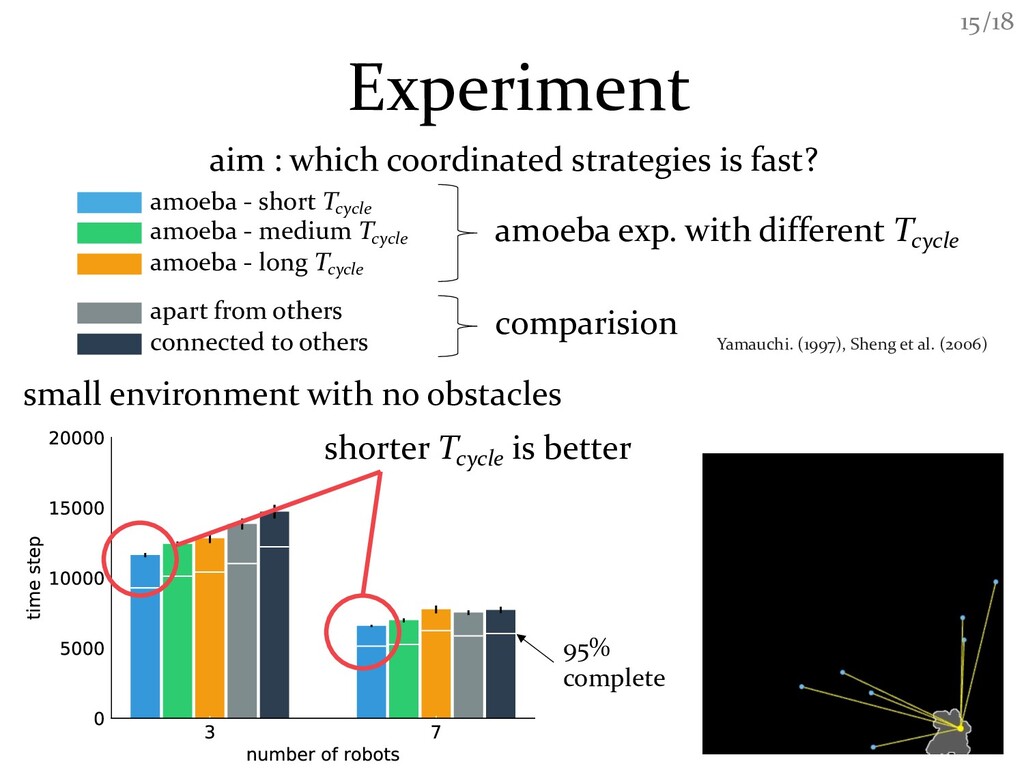
amoeba - short Tcycle amoeba - medium Tcycle amoeba - long Tcycle apart from others connected to others amoeba exp. with different Tcycle comparision Yamauchi. (1997), Sheng et al. (2006) 95% complete shorter Tcycle is better small environment with no obstacles
an effective framework - the effectiveness deeply depends on Tcycle - optimal Tcycle depends on environment Future Work - finding optimal Tcycle - multiple anchors - fault-tolerance Acknowledgements: This research was partly supported by JSPS KAKENHI Grant No. 17K00019 and by Japan Science and Technology Agency (JST) SICORP.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}