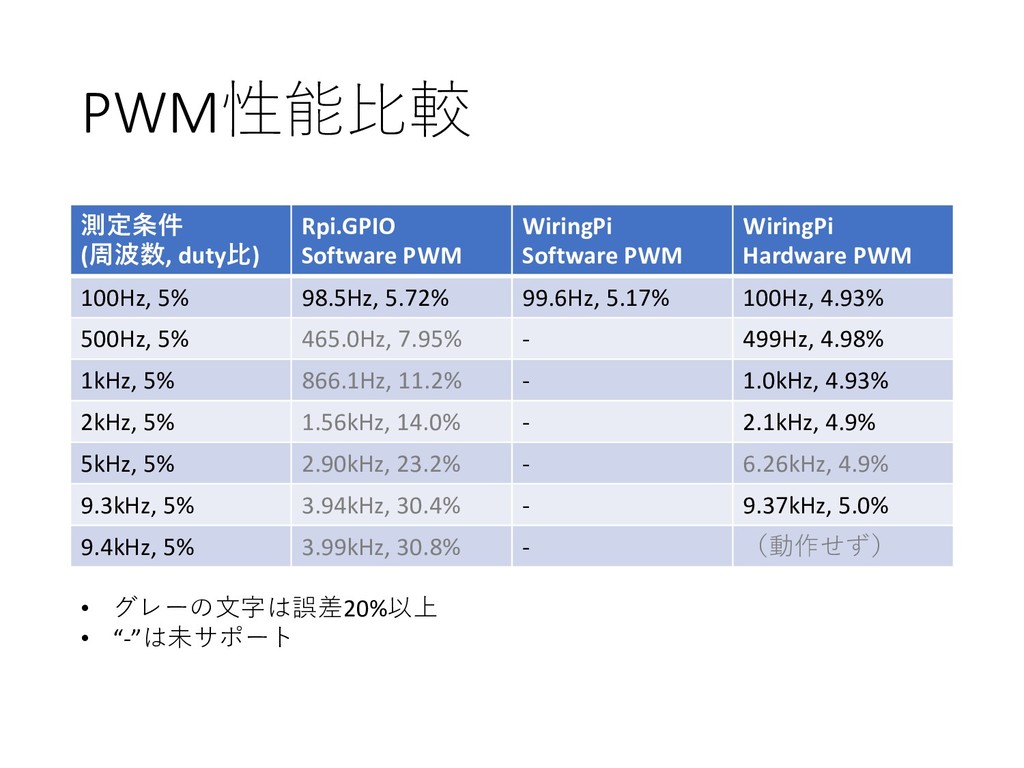
PiGpio Software PWM PiGpio Hardware PWM 100Hz, 5% 98.5Hz, 5.72% 100Hz, 4.93% 100Hz, 5.00% 100Hz, 5.04% 500Hz, 5% 465Hz, 7.95% 499Hz, 4.98% 500Hz, 5.00% 501Hz, 4.93% 1.0kHz, 5% 866Hz, 11.2% 1.0kHz, 4.93% 1.0kHz, 4.97% 1.0kHz, 4.98% 2.0kHz, 5% - - 2.0kHz, 4.80% 2.0kHz, 5.00% 9.3kHz, 5% 3.94kHz, 30.4% 9.37kHz, 5.0% 8.02kHz, 5.0% - 9.4kHz, 5% 3.99kHz, 30.8% (動作せず) 8.00kHz, 3.65% - 100kHz, 5% - - - 100kHz, 4.92% 1MHz, 5% - - - (1MHz, 4.05%) • グレーの⽂字は誤差10%以上 • “-”は未測定 • 1MHz時のduty⽐測定はオシロの性能限界なので参考値
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}