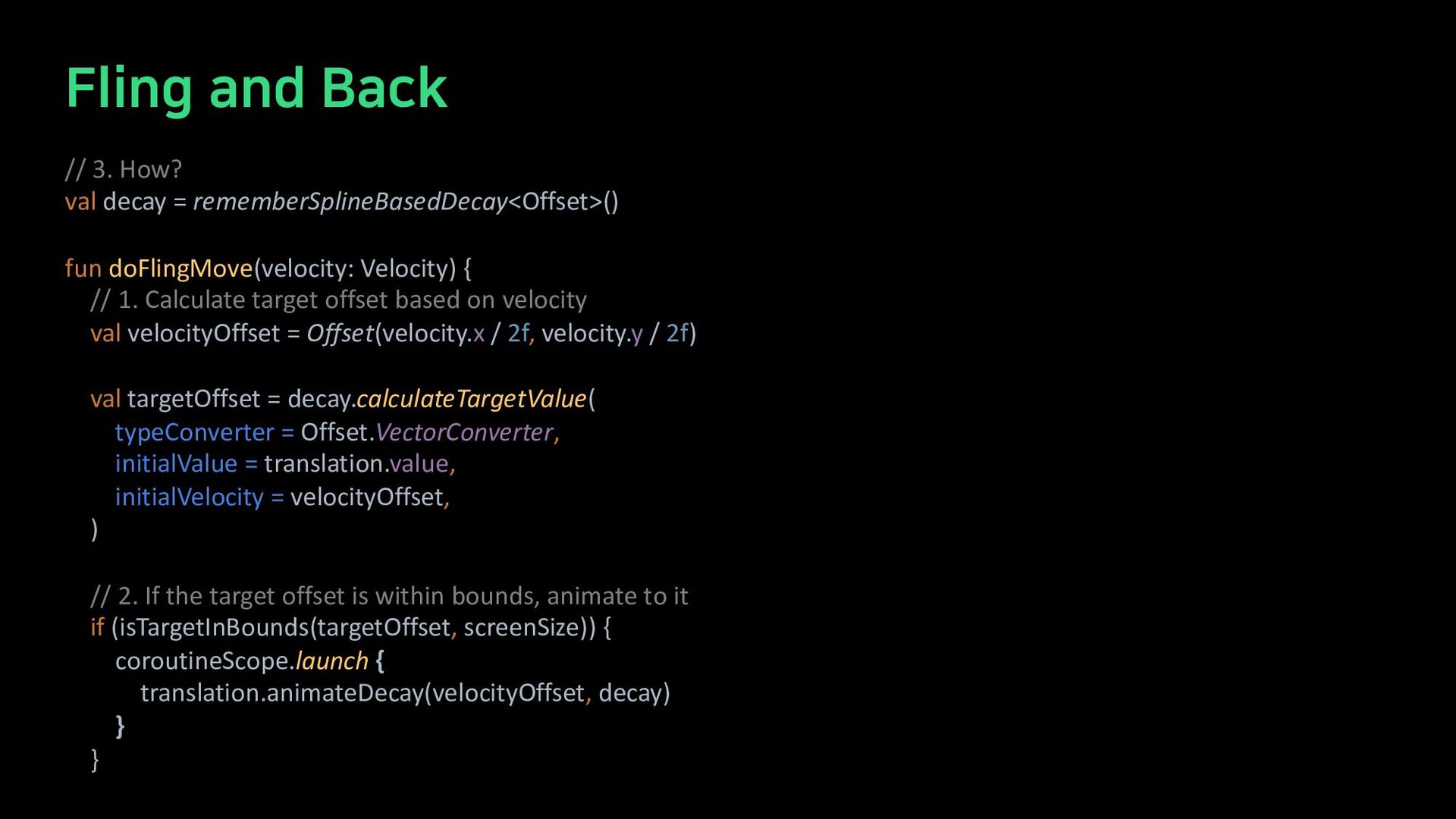
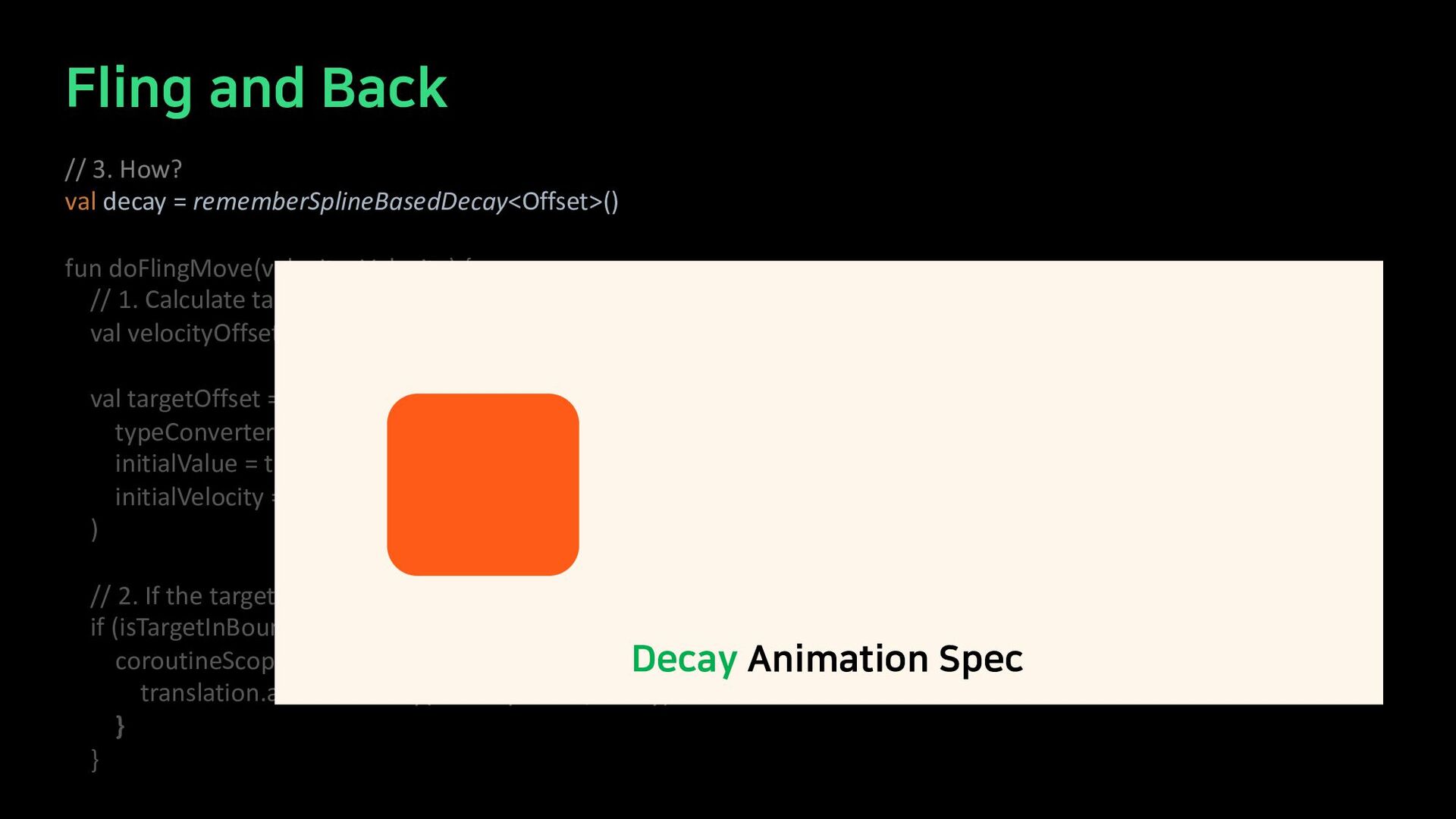
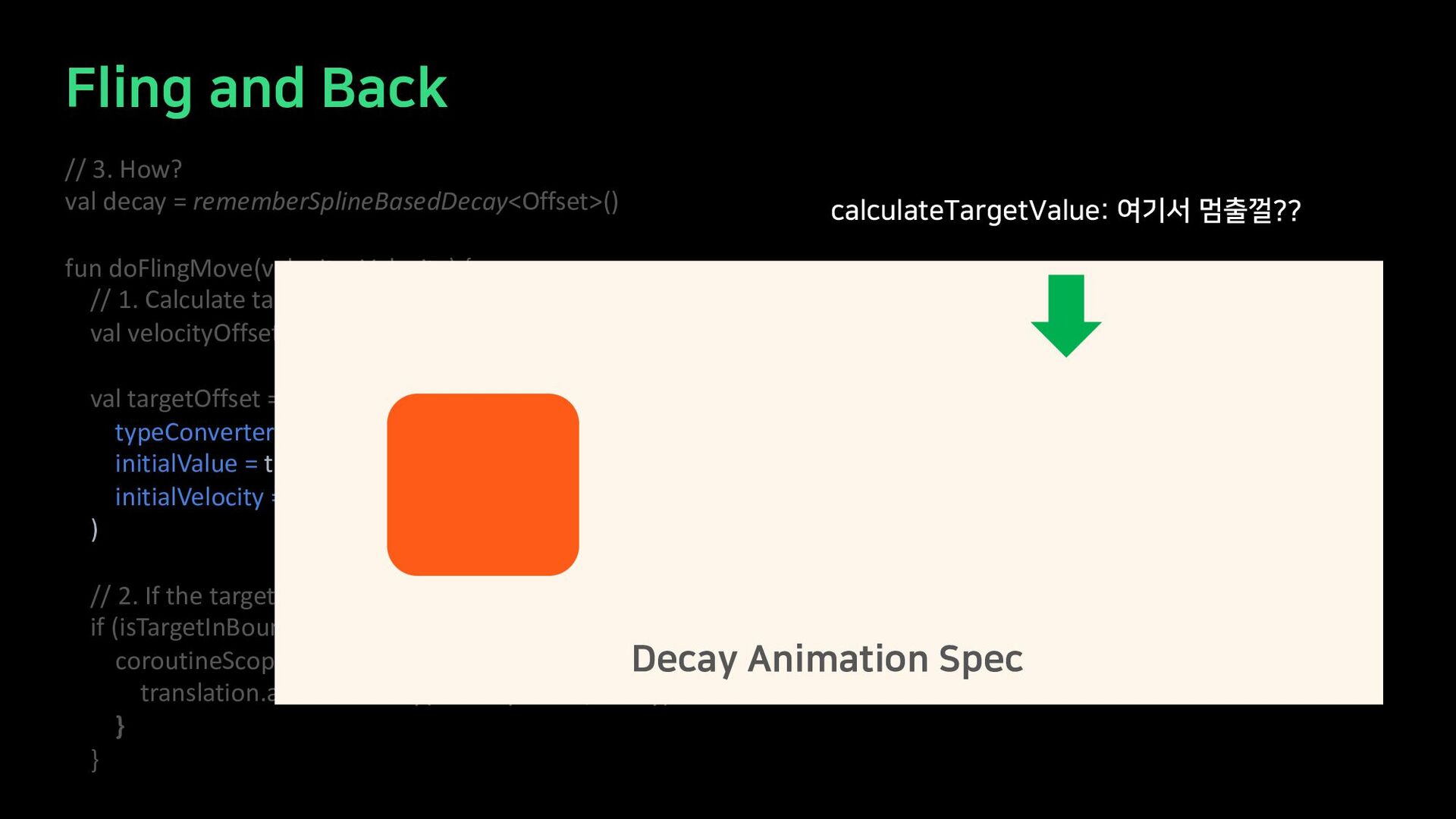
fun doFlingMove(velocity: Velocity) { // 1. Calculate target offset based on velocity val velocityOffset = Offset(velocity.x / 2f, velocity.y / 2f) val targetOffset = decay.calculateTargetValue( typeConverter = Offset.VectorConverter, initialValue = translation.value, initialVelocity = velocityOffset, ) // 2. If the target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } }
fun doFlingMove(velocity: Velocity) { // 1. Calculate target offset based on velocity val velocityOffset = Offset(velocity.x / 2f, velocity.y / 2f) val targetOffset = decay.calculateTargetValue( typeConverter = Offset.VectorConverter, initialValue = translation.value, initialVelocity = velocityOffset, ) // 2. If the target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } } Decay Animation Spec
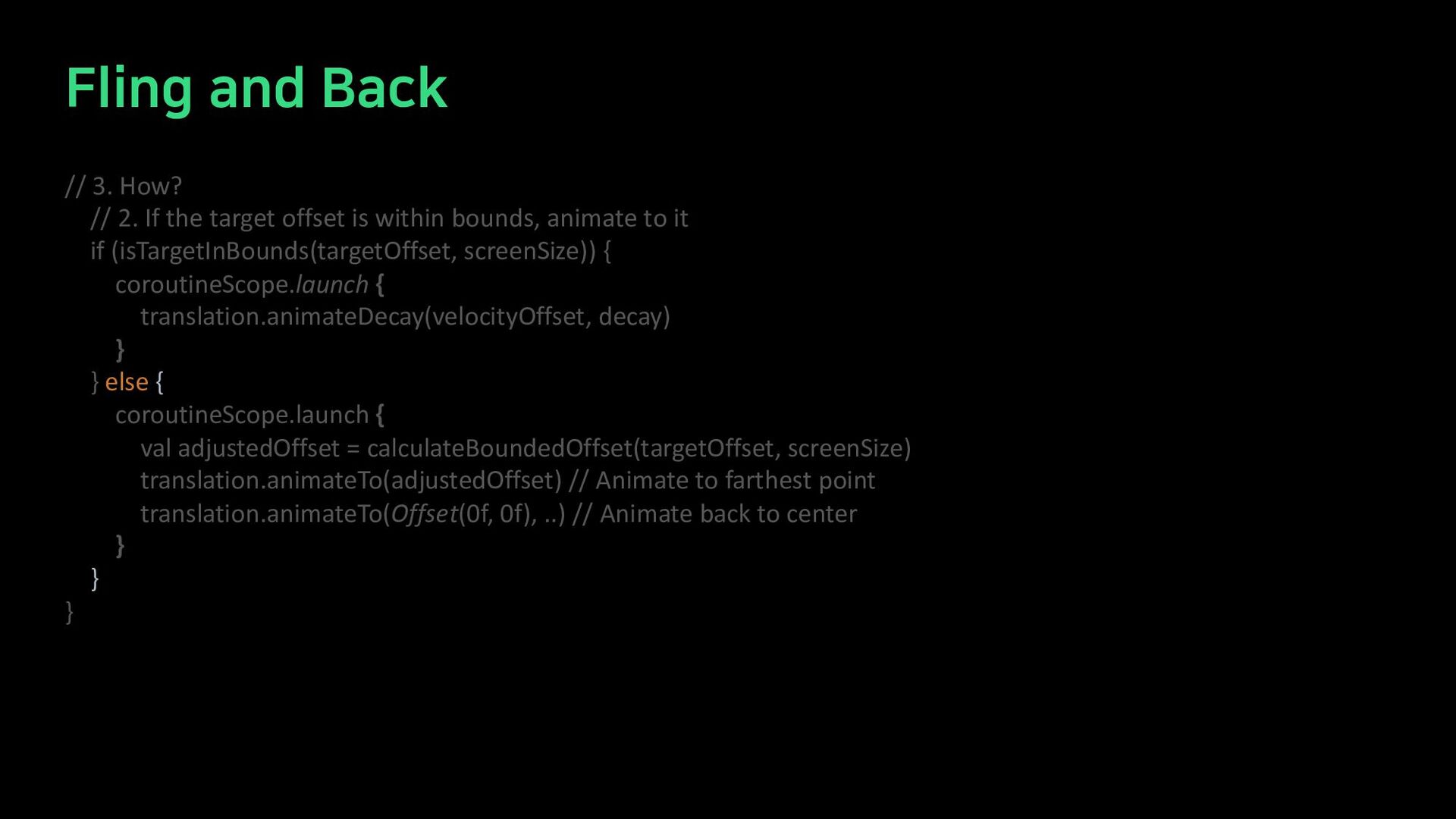
target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } } else { coroutineScope.launch { val adjustedOffset = calculateBoundedOffset(targetOffset, screenSize) // Get farthest Offset translation.animateTo(adjustedOffset) // Animate to farthest point translation.animateTo(Offset(0f, 0f), ..) // Animate back to center } } }
target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } } else { coroutineScope.launch { val adjustedOffset = calculateBoundedOffset(targetOffset, screenSize) // Get farthest Offset translation.animateTo(adjustedOffset) // Animate to farthest point translation.animateTo(Offset(0f, 0f), ..) // Animate back to center } } }
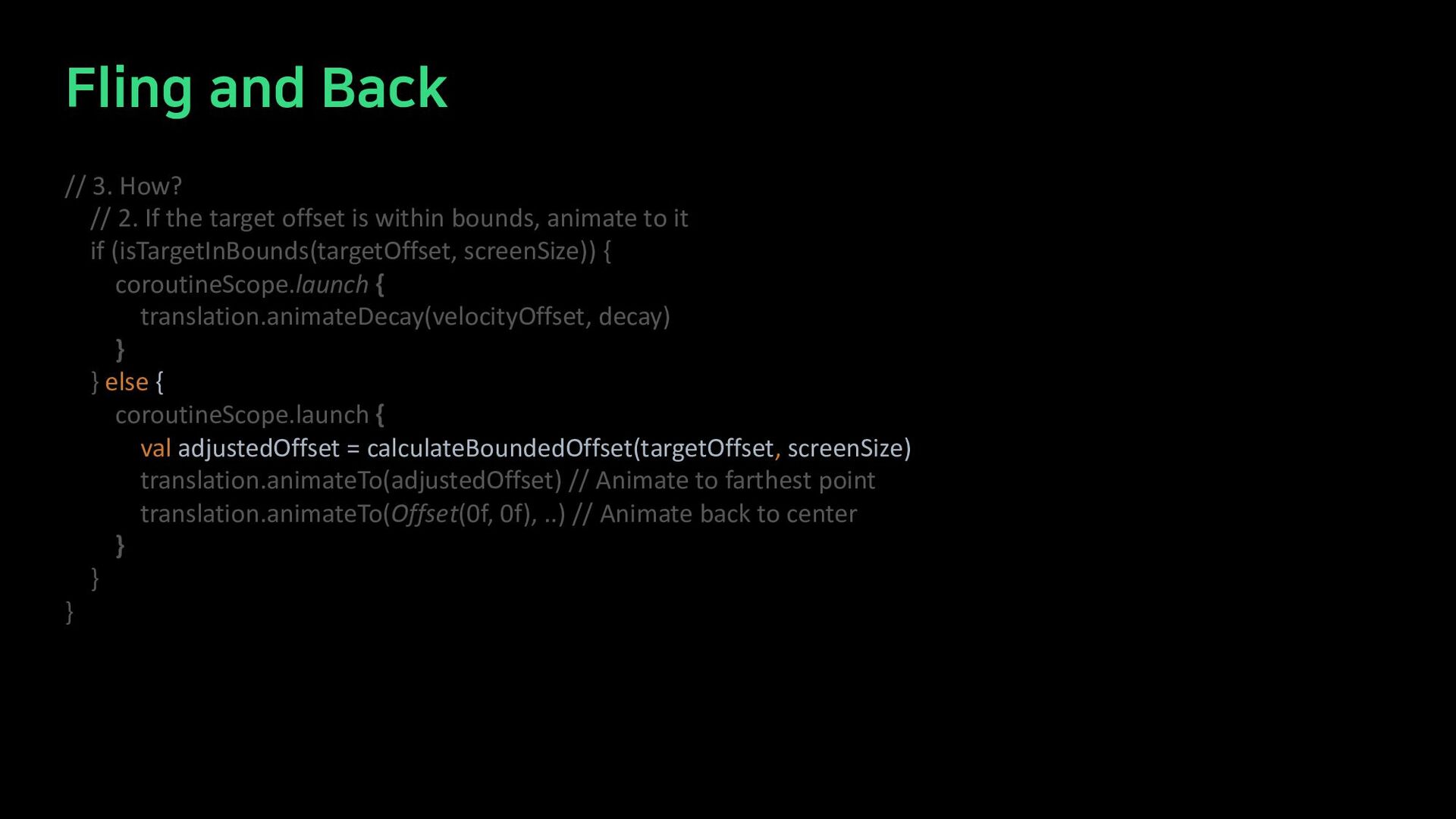
target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } } else { coroutineScope.launch { val adjustedOffset = calculateBoundedOffset(targetOffset, screenSize) translation.animateTo(adjustedOffset) // Animate to farthest point translation.animateTo(Offset(0f, 0f), ..) // Animate back to center } } }
target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } } else { coroutineScope.launch { val adjustedOffset = calculateBoundedOffset(targetOffset, screenSize) translation.animateTo(adjustedOffset) // Animate to farthest point translation.animateTo(Offset(0f, 0f), ..) // Animate back to center } } }
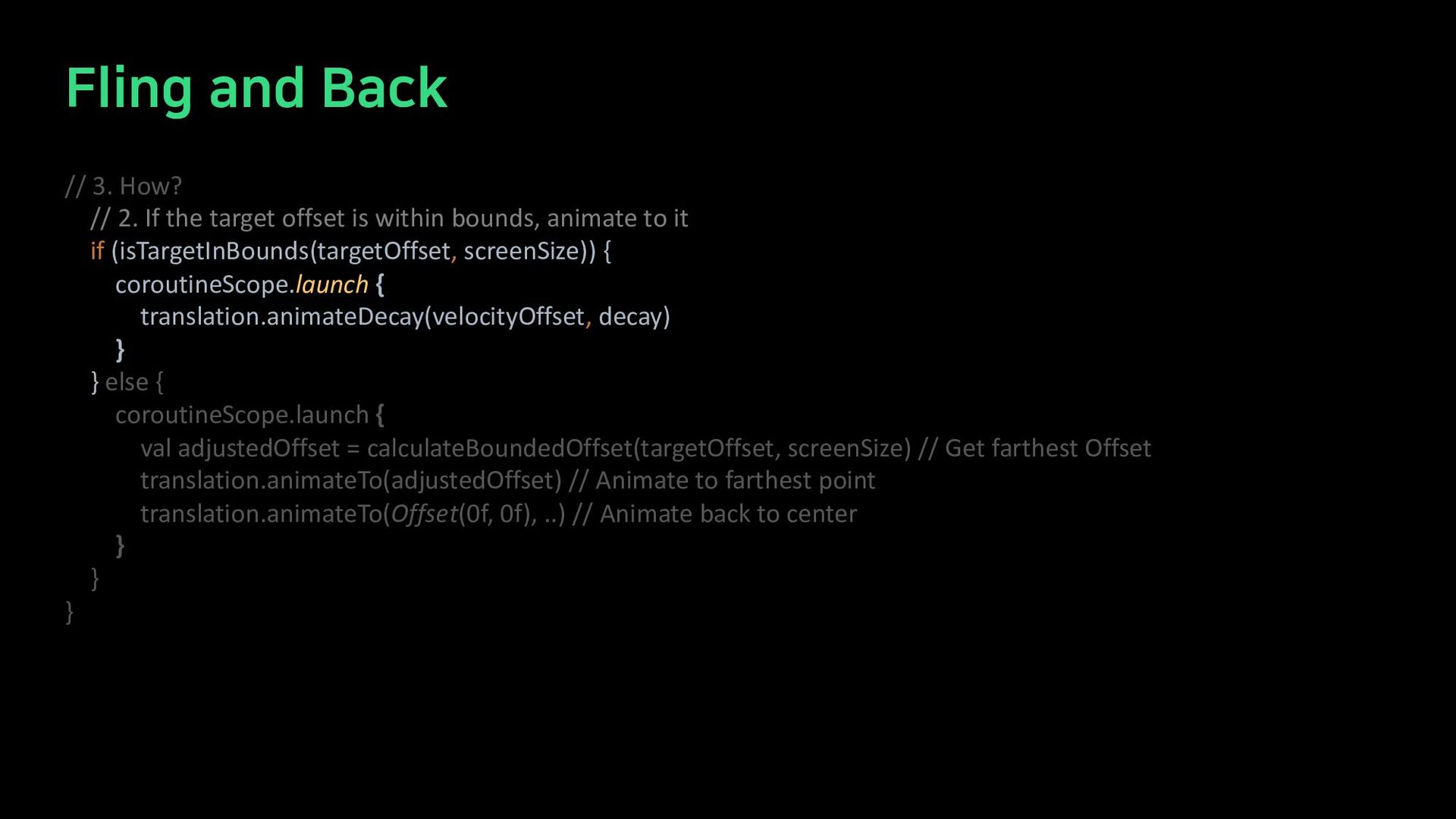
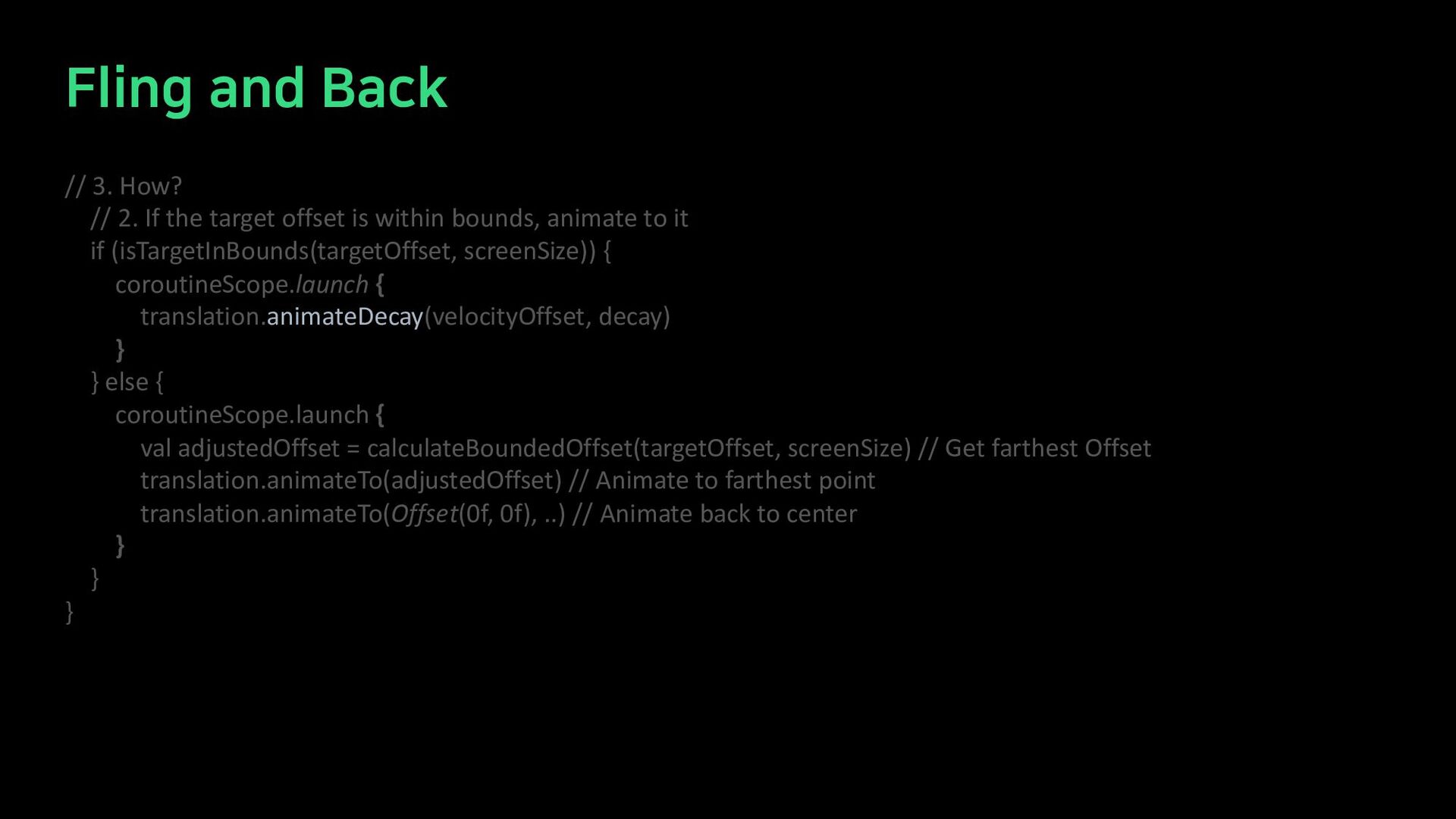
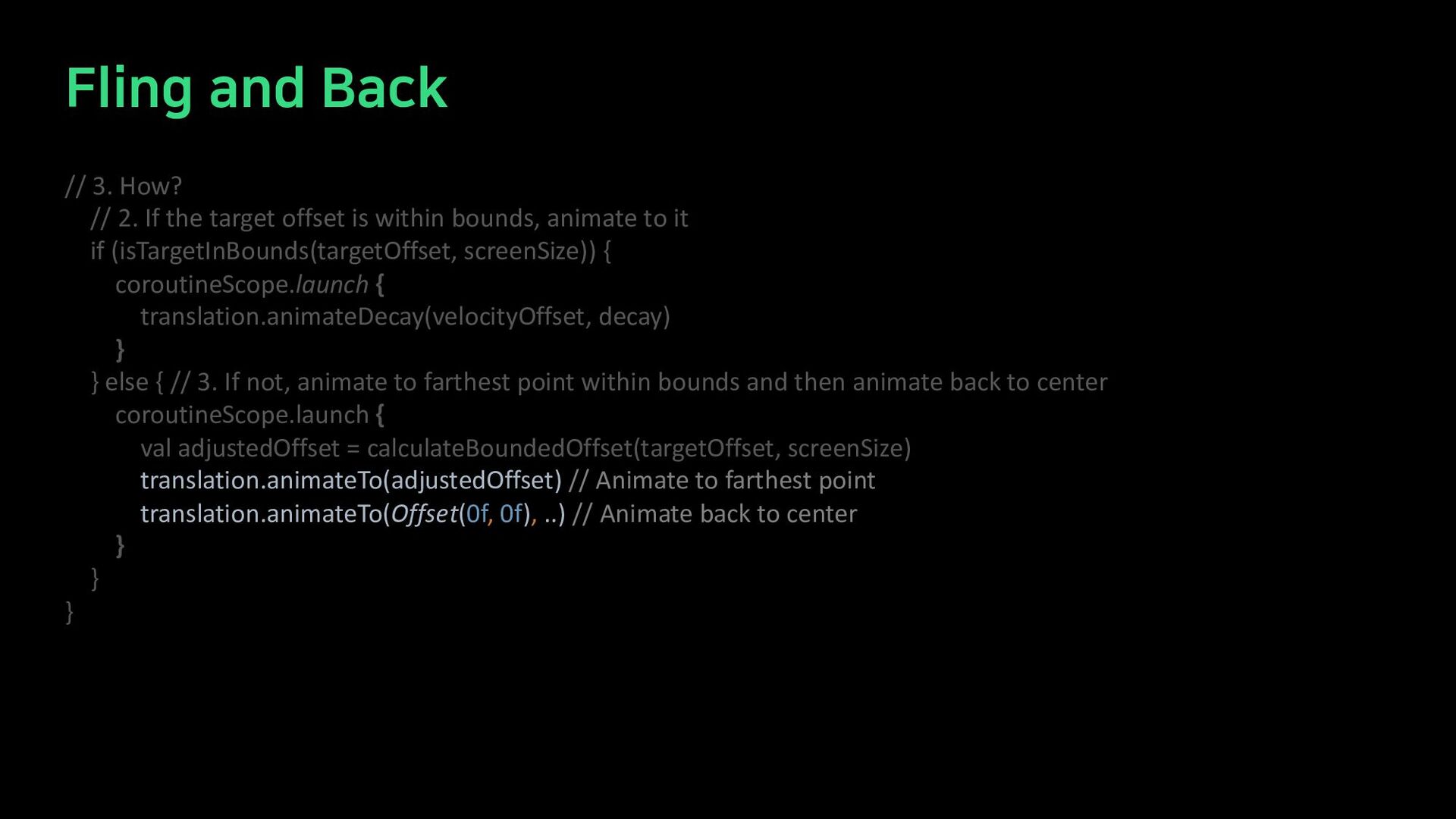
target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } } else { // 3. If not, animate to farthest point within bounds and then animate back to center coroutineScope.launch { val adjustedOffset = calculateBoundedOffset(targetOffset, screenSize) translation.animateTo(adjustedOffset) // Animate to farthest point translation.animateTo(Offset(0f, 0f), ..) // Animate back to center } } }
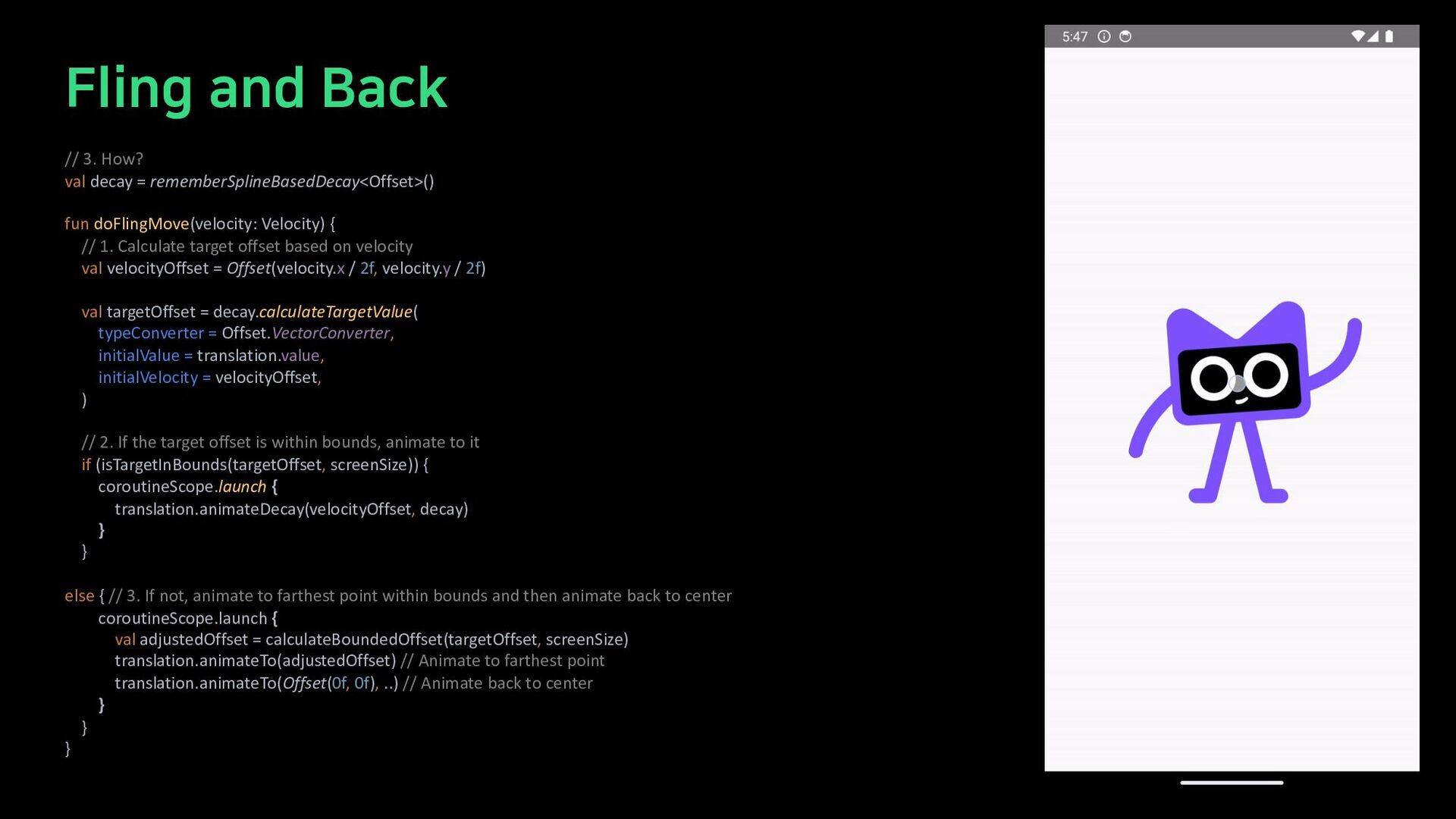
fun doFlingMove(velocity: Velocity) { // 1. Calculate target offset based on velocity val velocityOffset = Offset(velocity.x / 2f, velocity.y / 2f) val targetOffset = decay.calculateTargetValue( typeConverter = Offset.VectorConverter, initialValue = translation.value, initialVelocity = velocityOffset, ) // 2. If the target offset is within bounds, animate to it if (isTargetInBounds(targetOffset, screenSize)) { coroutineScope.launch { translation.animateDecay(velocityOffset, decay) } } else { // 3. If not, animate to farthest point within bounds and then animate back to center coroutineScope.launch { val adjustedOffset = calculateBoundedOffset(targetOffset, screenSize) translation.animateTo(adjustedOffset) // Animate to farthest point translation.animateTo(Offset(0f, 0f), ..) // Animate back to center } } }
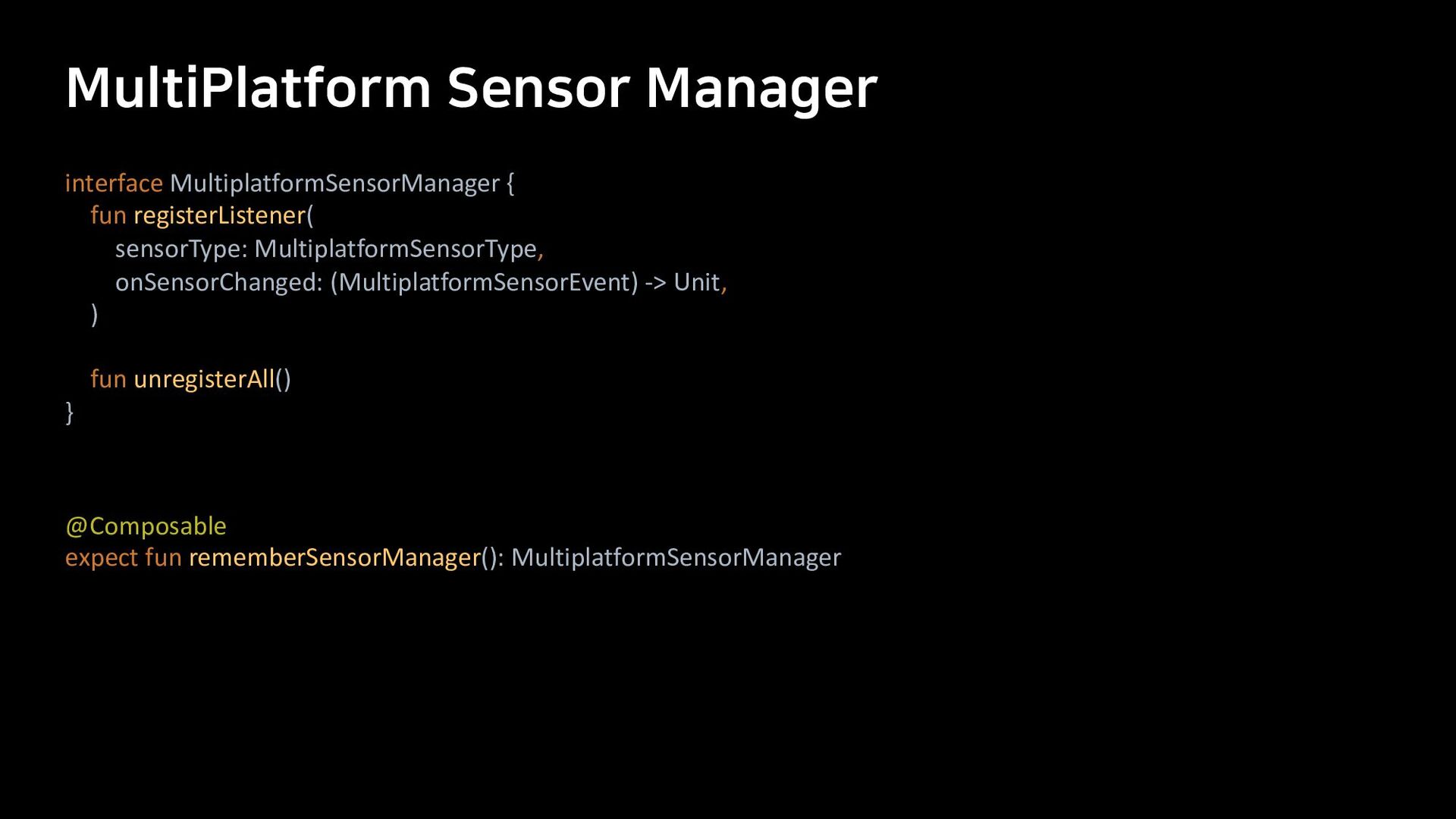
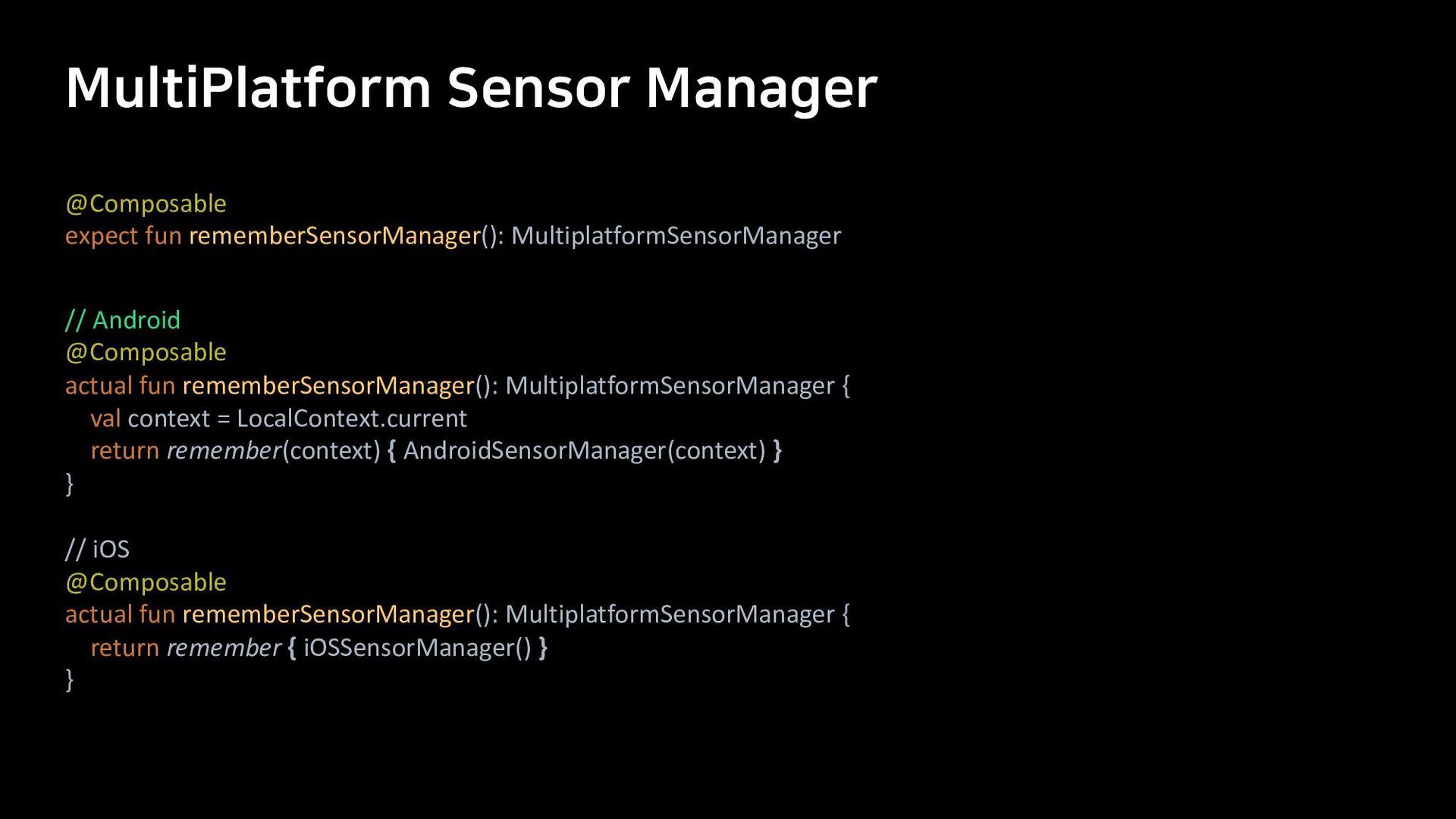
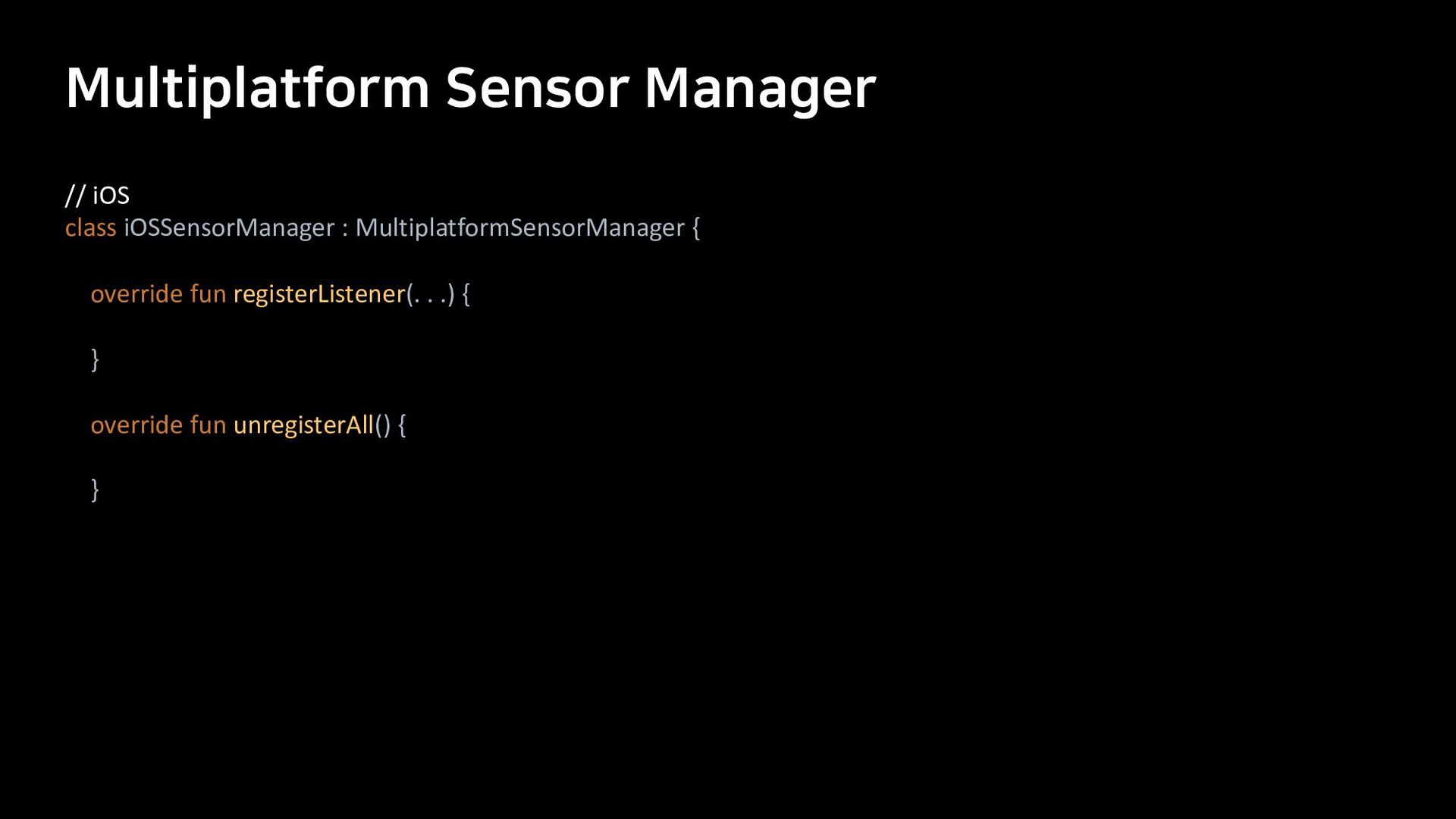
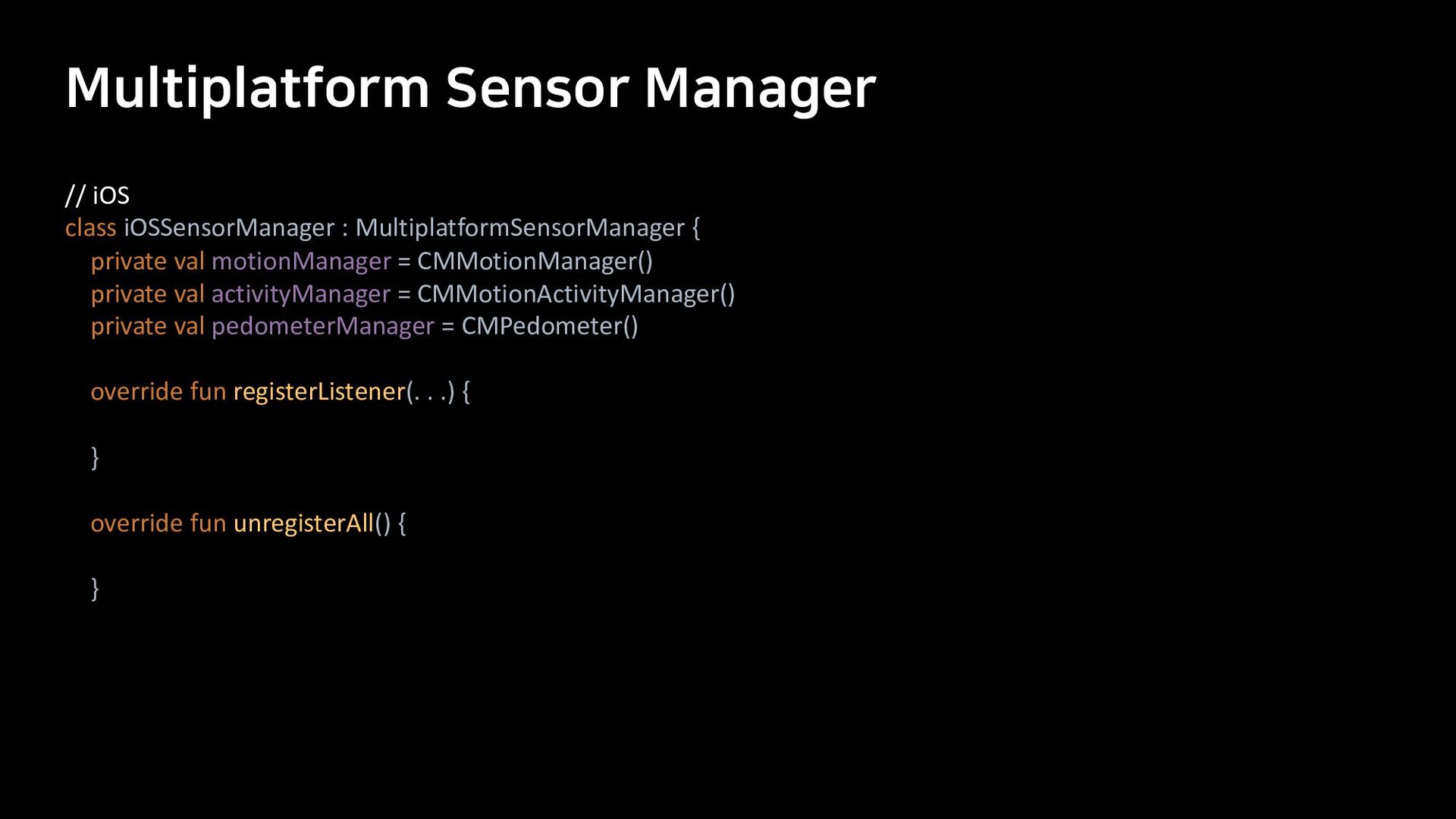
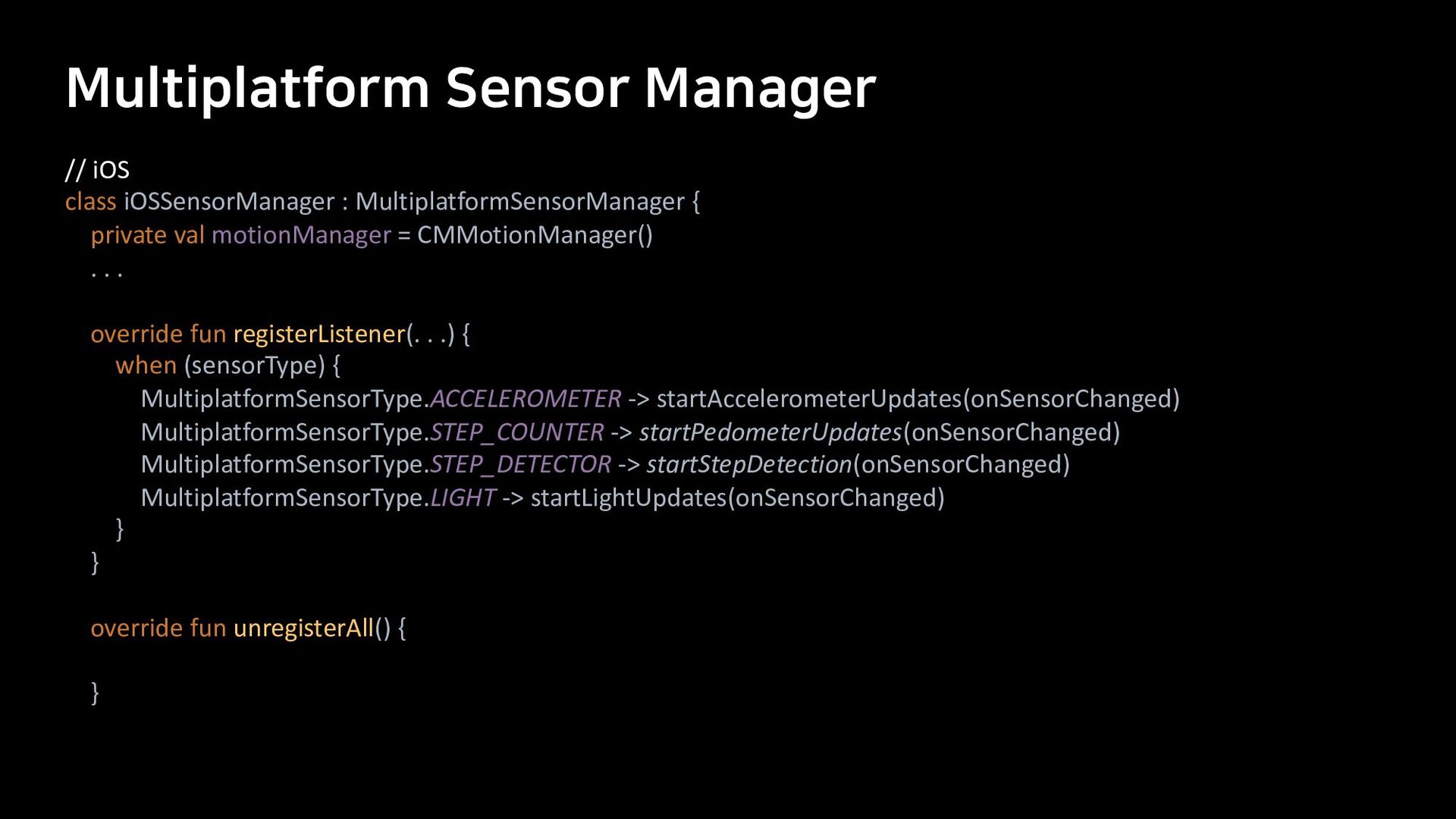
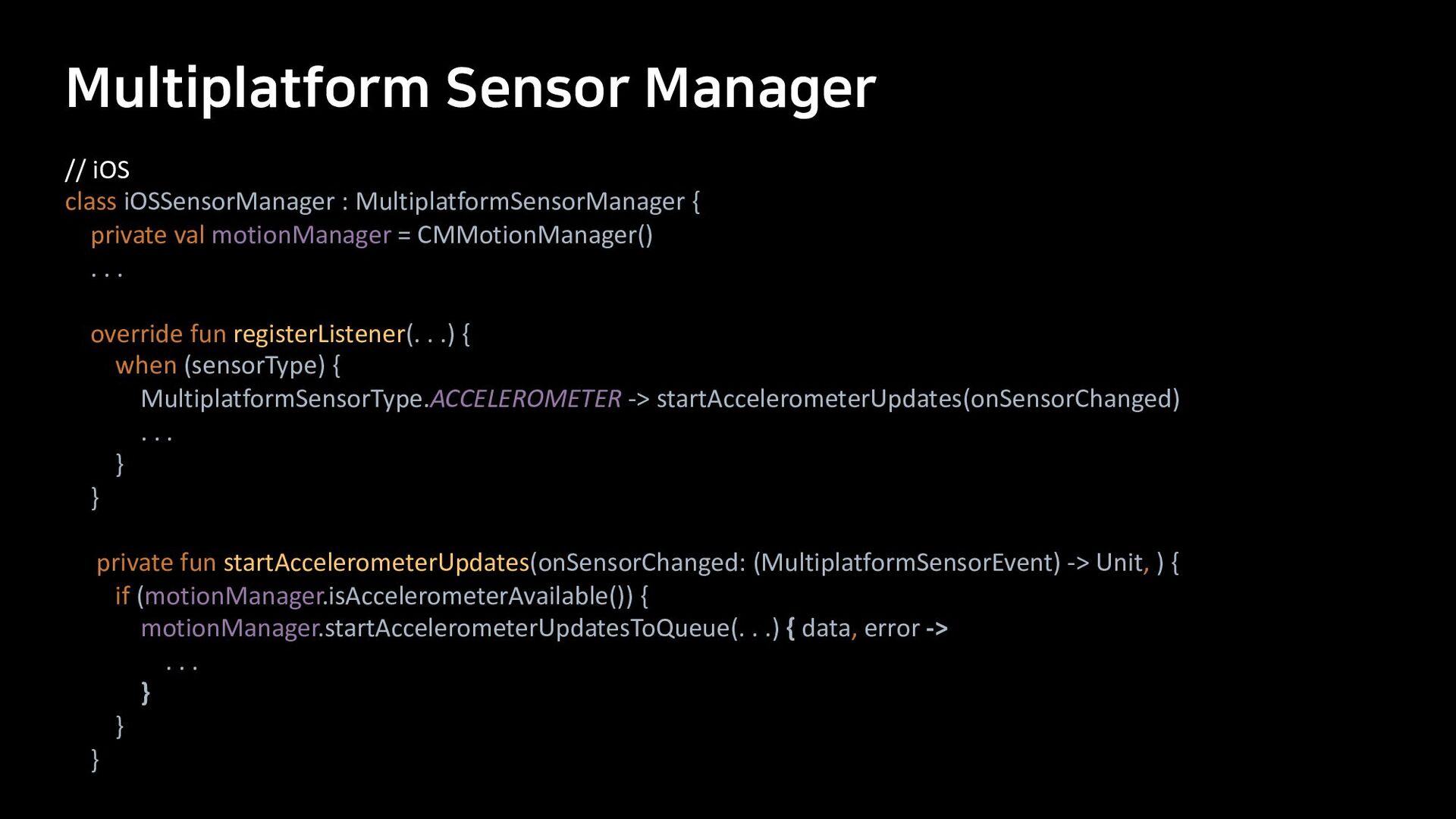
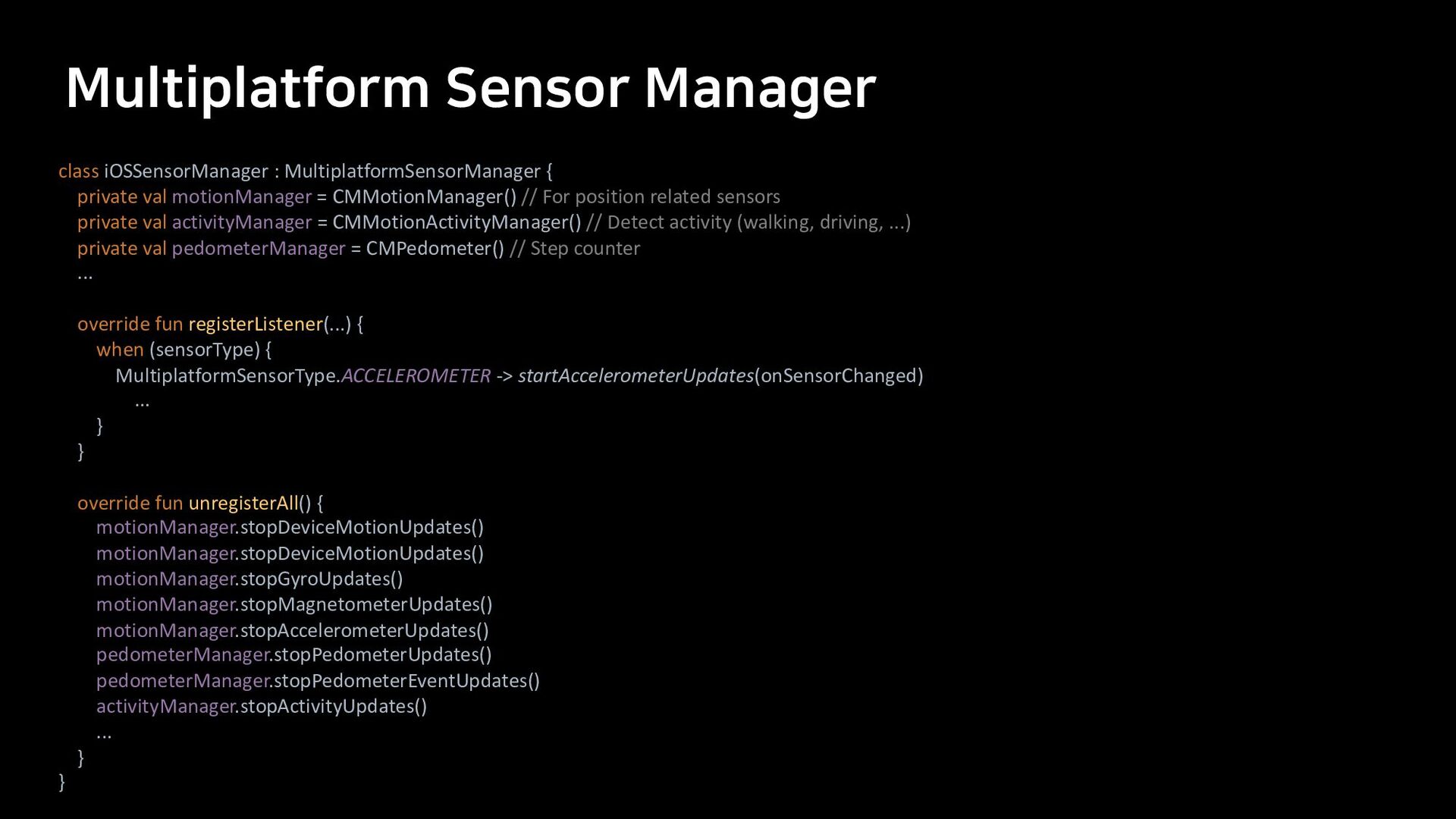
onSensorChanged: (MultiplatformSensorEvent) -> Unit, ) fun unregisterAll() } @Composable expect fun rememberSensorManager(): MultiplatformSensorManager
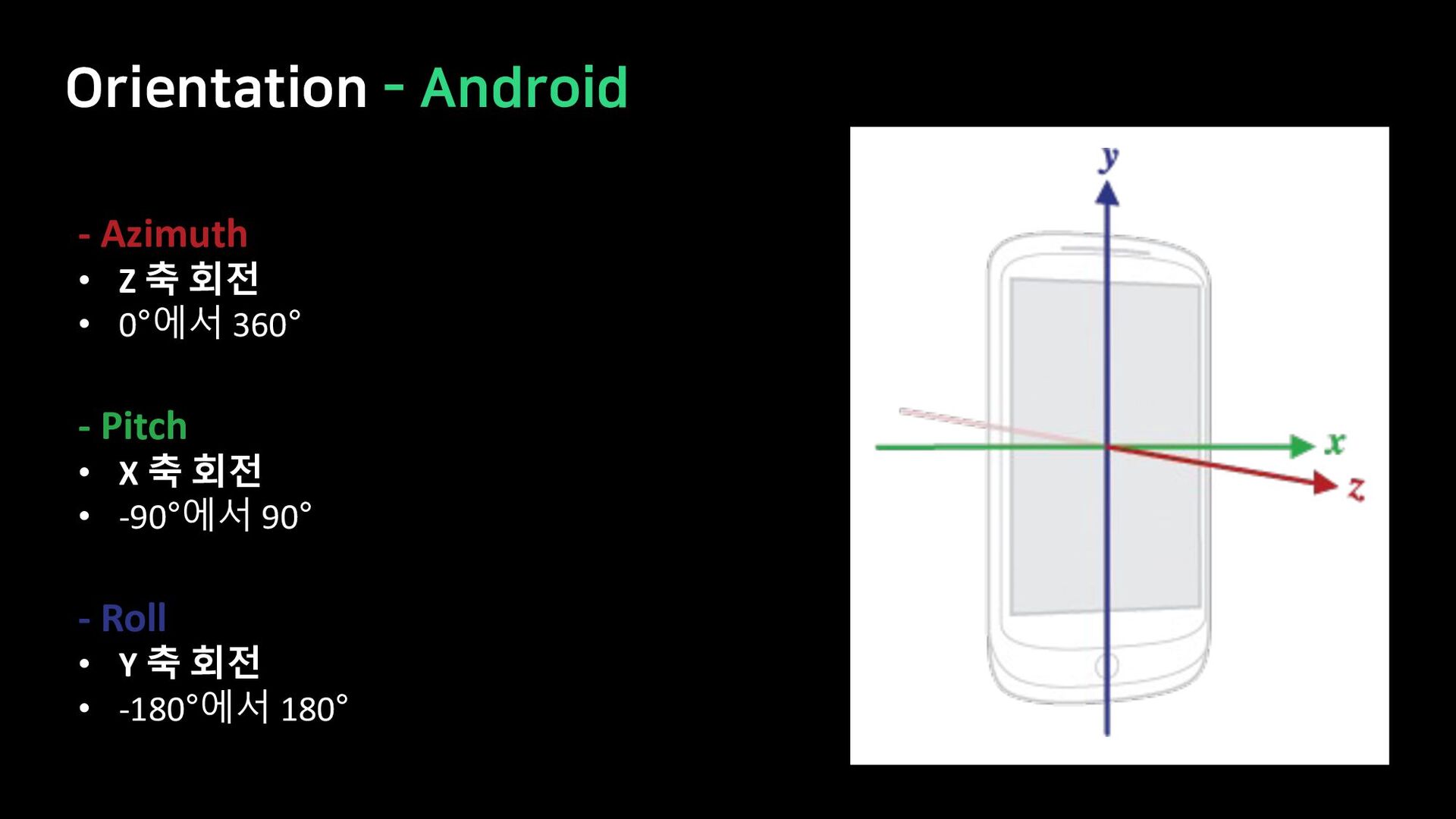
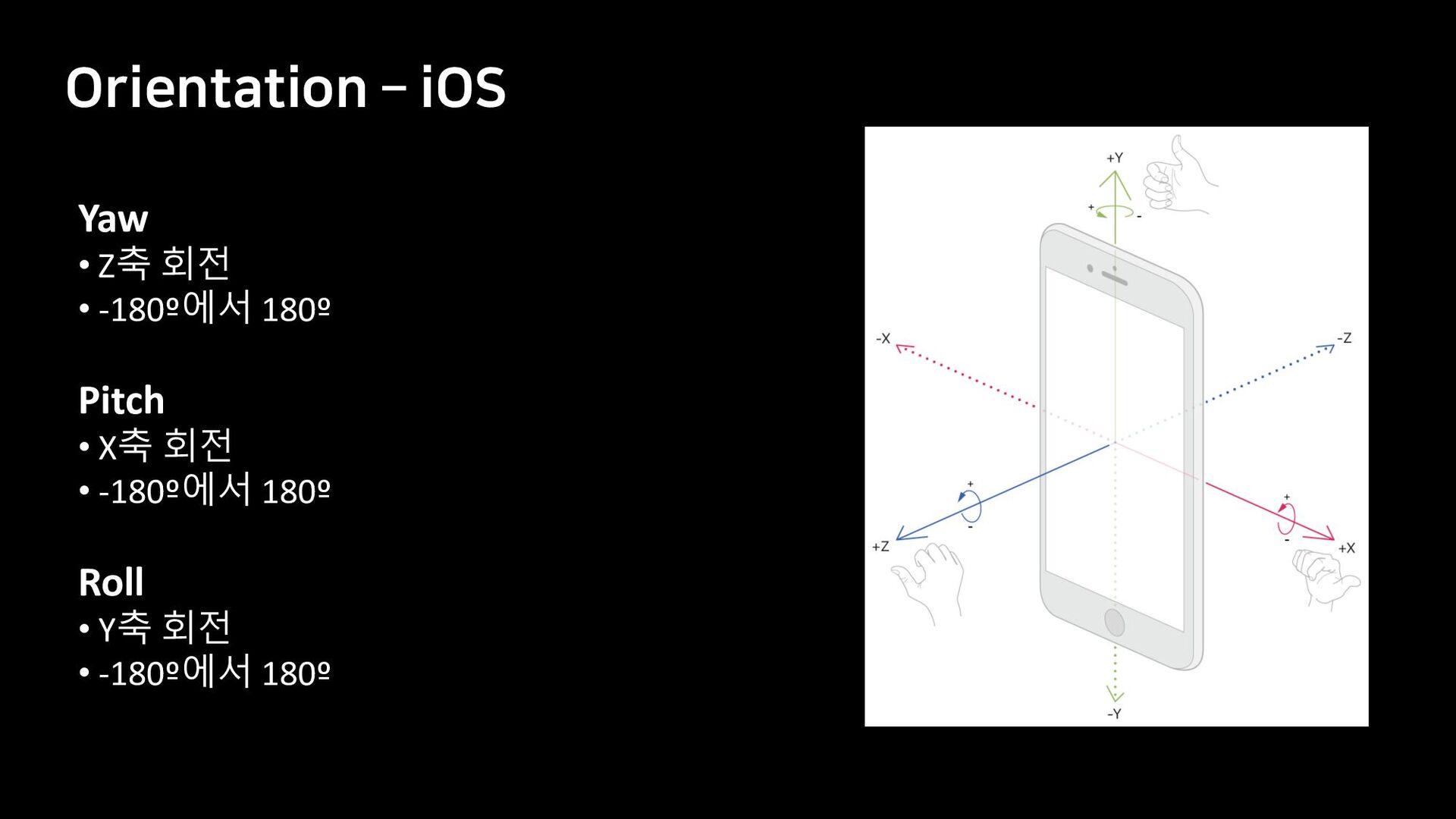
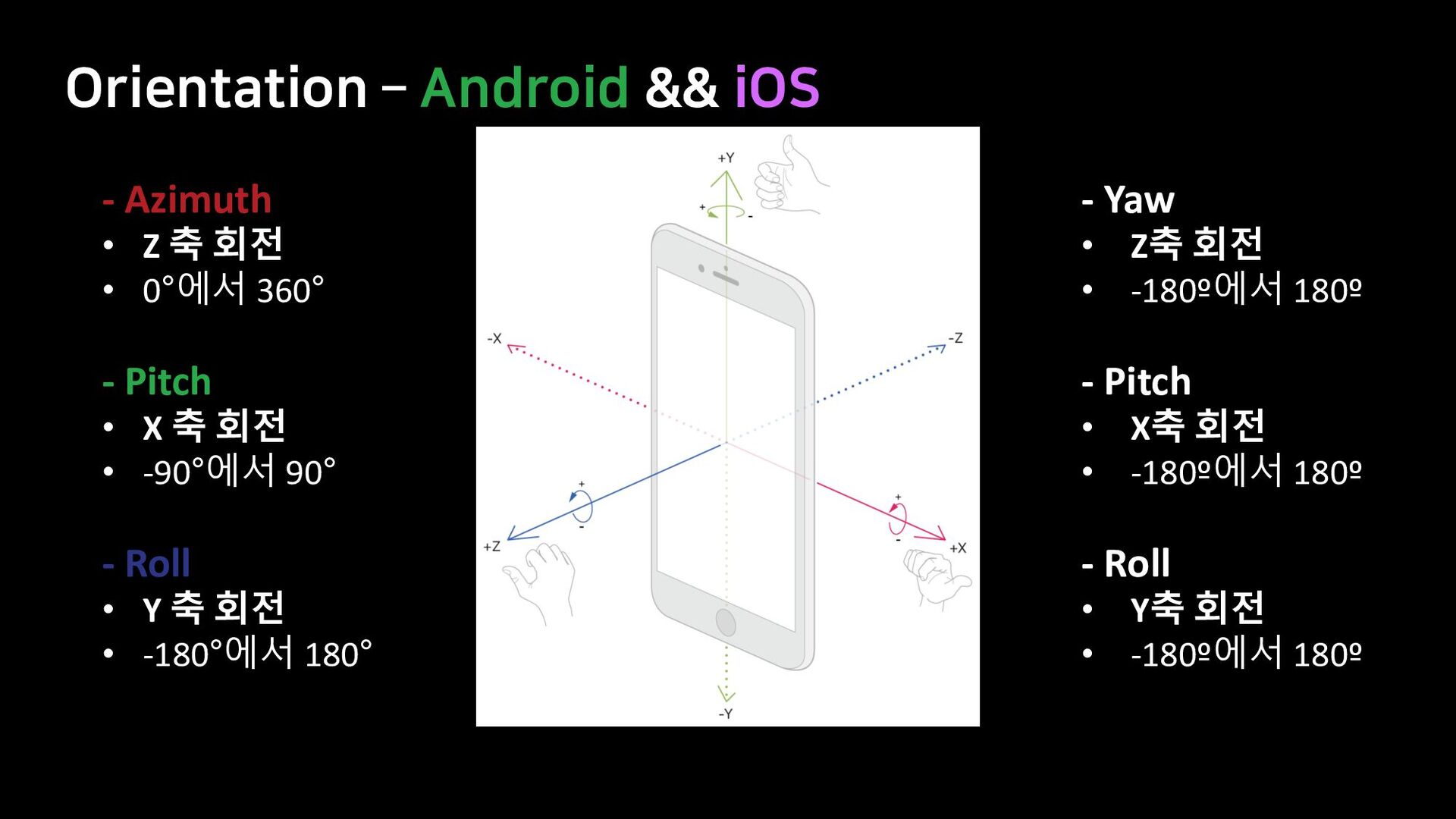
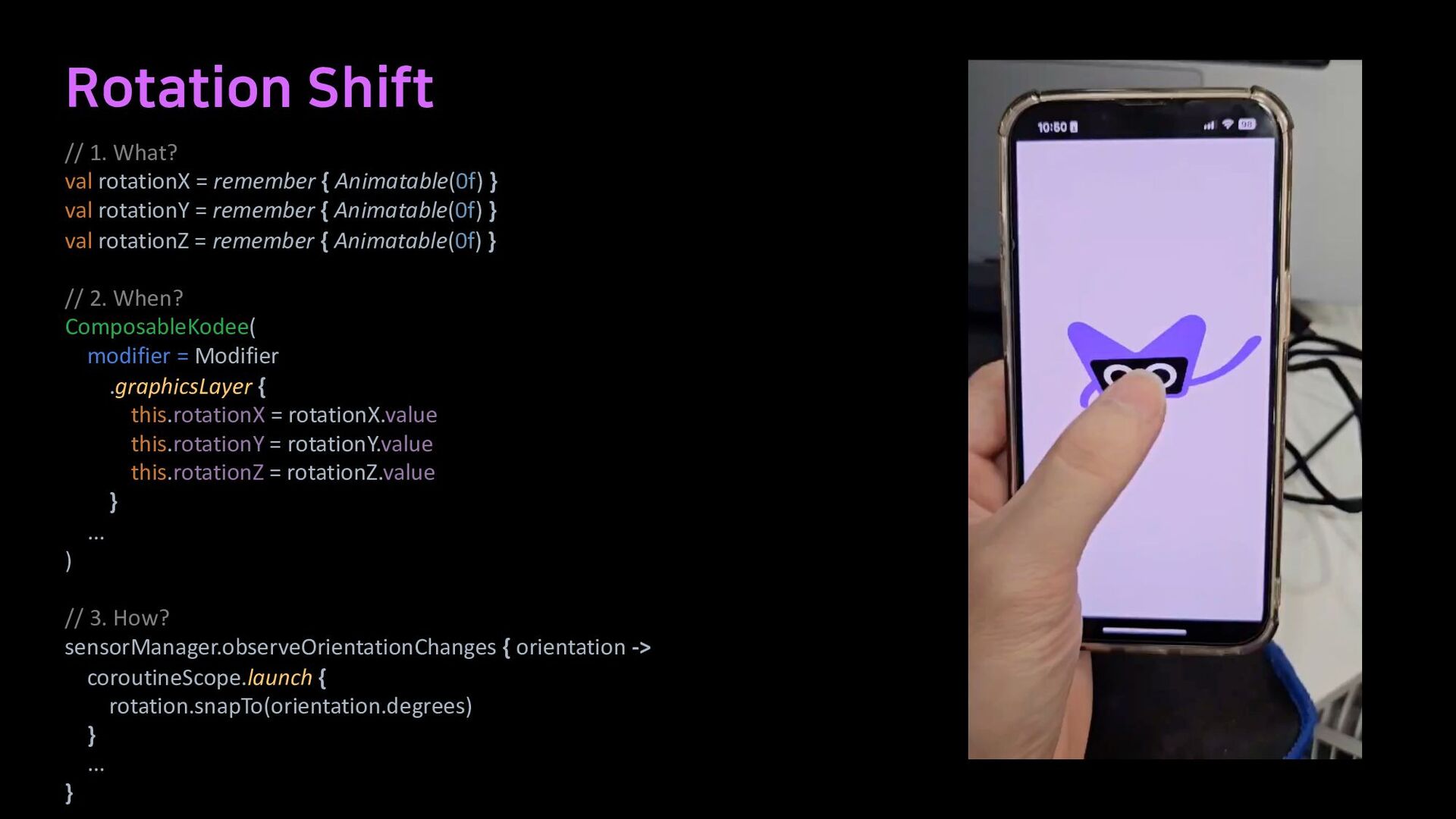
• -180º에서 180º - Pitch • X축 회전 • -180º에서 180º - Roll • Y축 회전 • -180º에서 180º - Azimuth • Z 축 회전 • 0°에서 360° - Pitch • X 축 회전 • -90°에서 90° - Roll • Y 축 회전 • -180°에서 180°
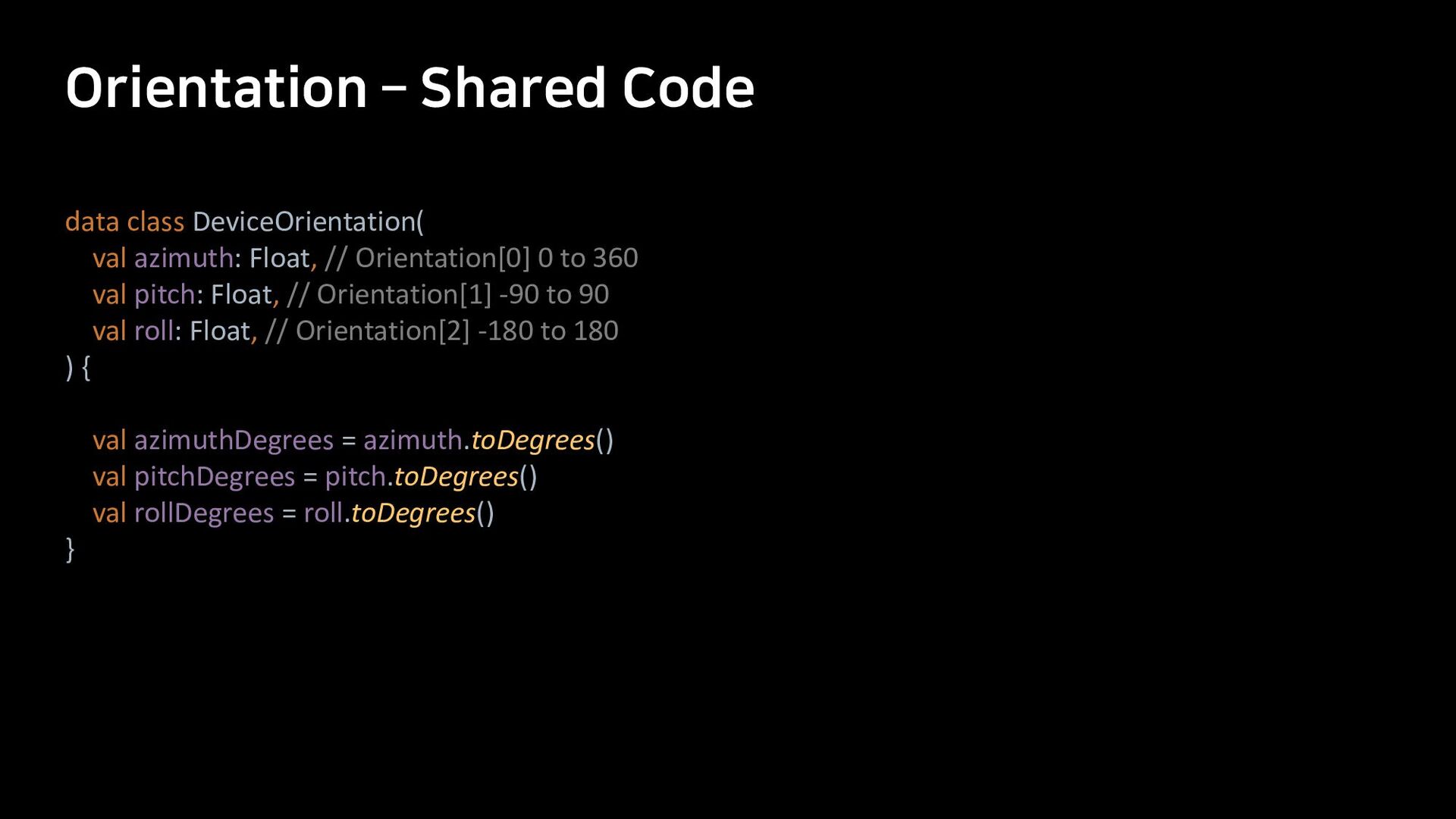
// Orientation[0] 0 to 360 val pitch: Float, // Orientation[1] -90 to 90 val roll: Float, // Orientation[2] -180 to 180 ) { val azimuthDegrees = azimuth.toDegrees() val pitchDegrees = pitch.toDegrees() val rollDegrees = roll.toDegrees() }
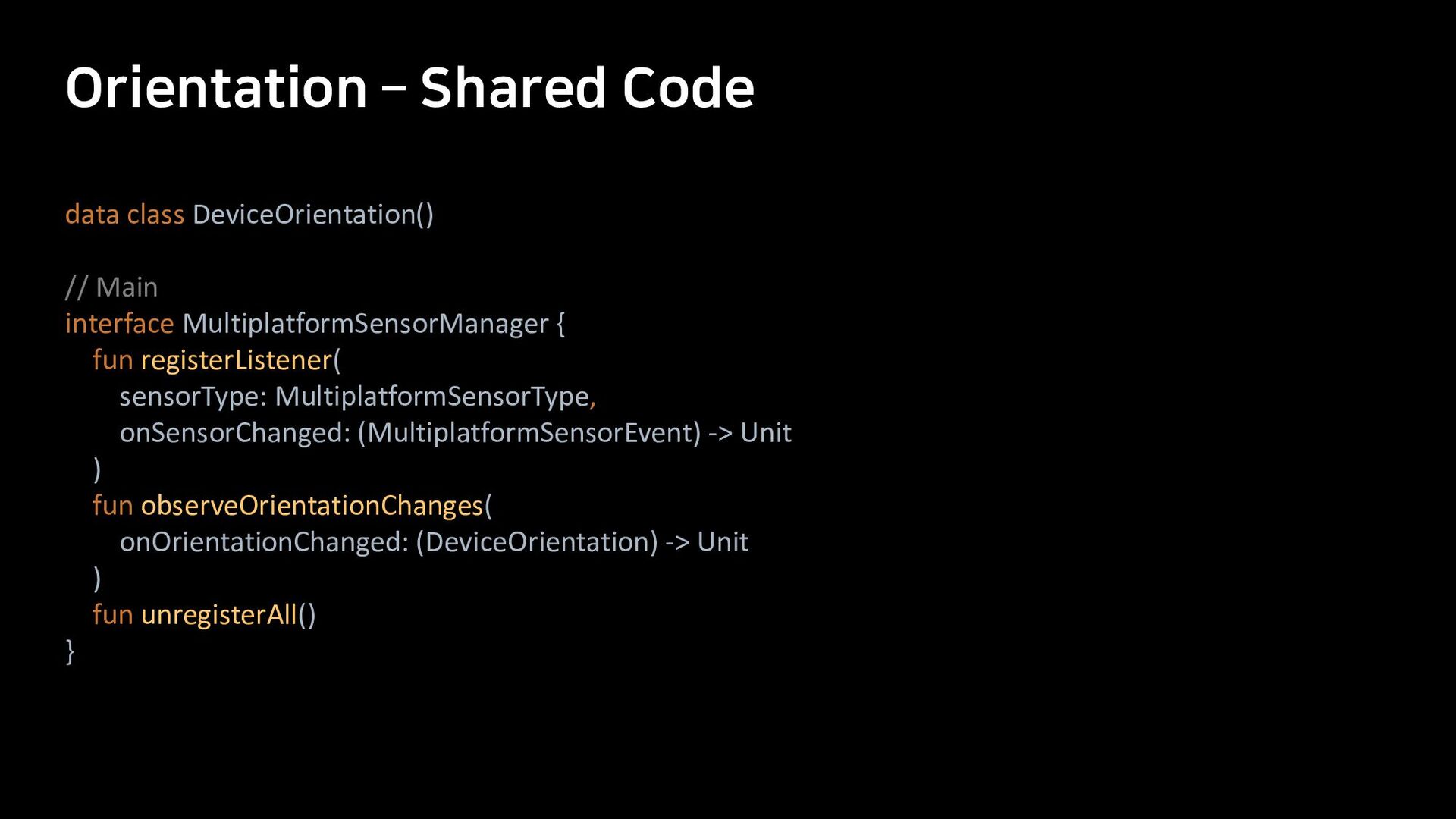
MultiplatformSensorManager { fun registerListener( sensorType: MultiplatformSensorType, onSensorChanged: (MultiplatformSensorEvent) -> Unit ) fun observeOrientationChanges( onOrientationChanged: (DeviceOrientation) -> Unit ) fun unregisterAll() }
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}