Map Inpainting for RGB-D View Synthesis Pierre Buyssens, Maxime Daisy, David Tschumperlé, Olivier Lézoray GREYC, Image Team, University of Caen, France Sept. 30 2015 1/24
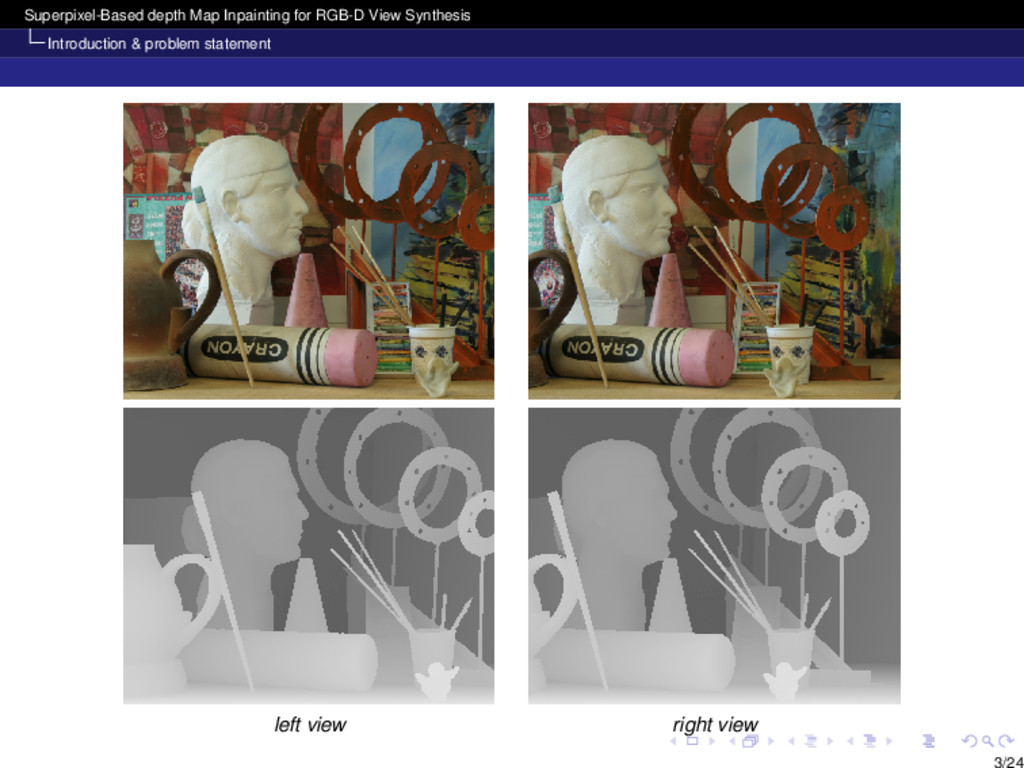
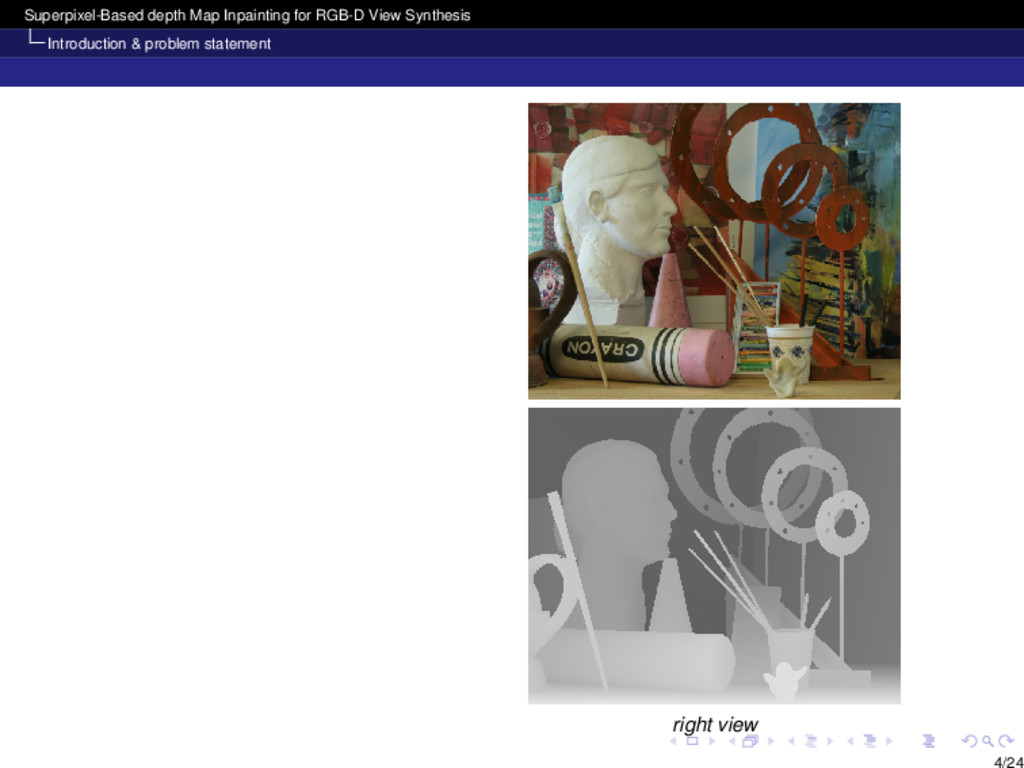
problem statement Horizontal warping ⇒ a scanline method should be sufficient. Really ? Image continuous by parts ⇒ a diffusion method should solve the problem. Really ? 7/24
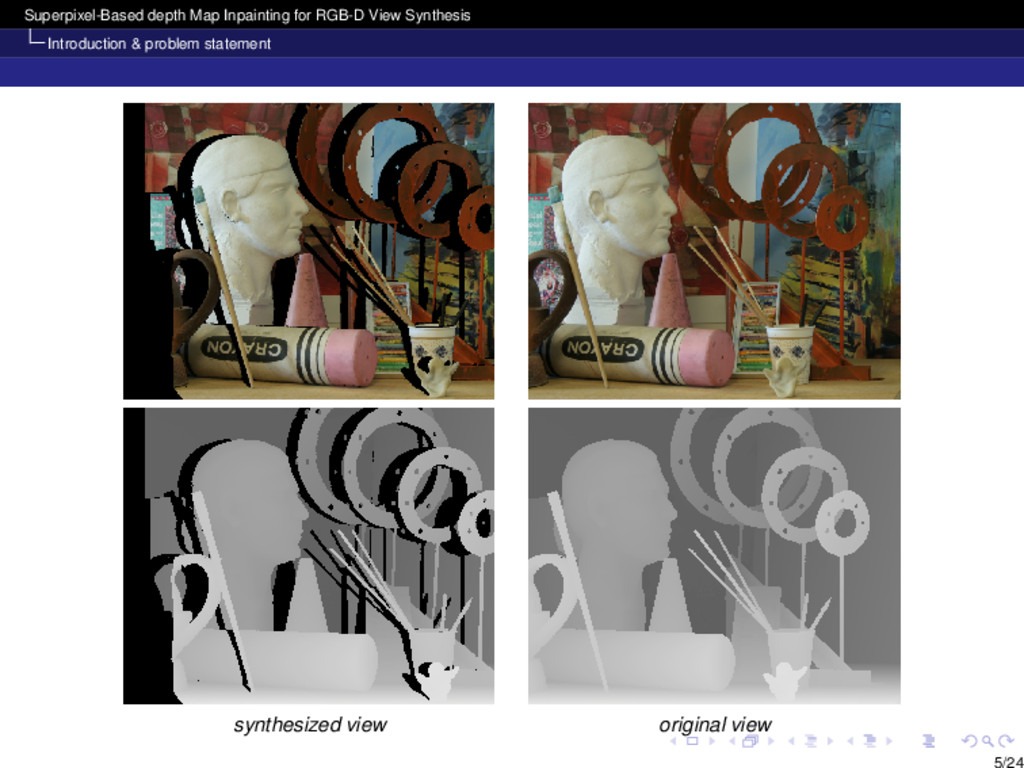
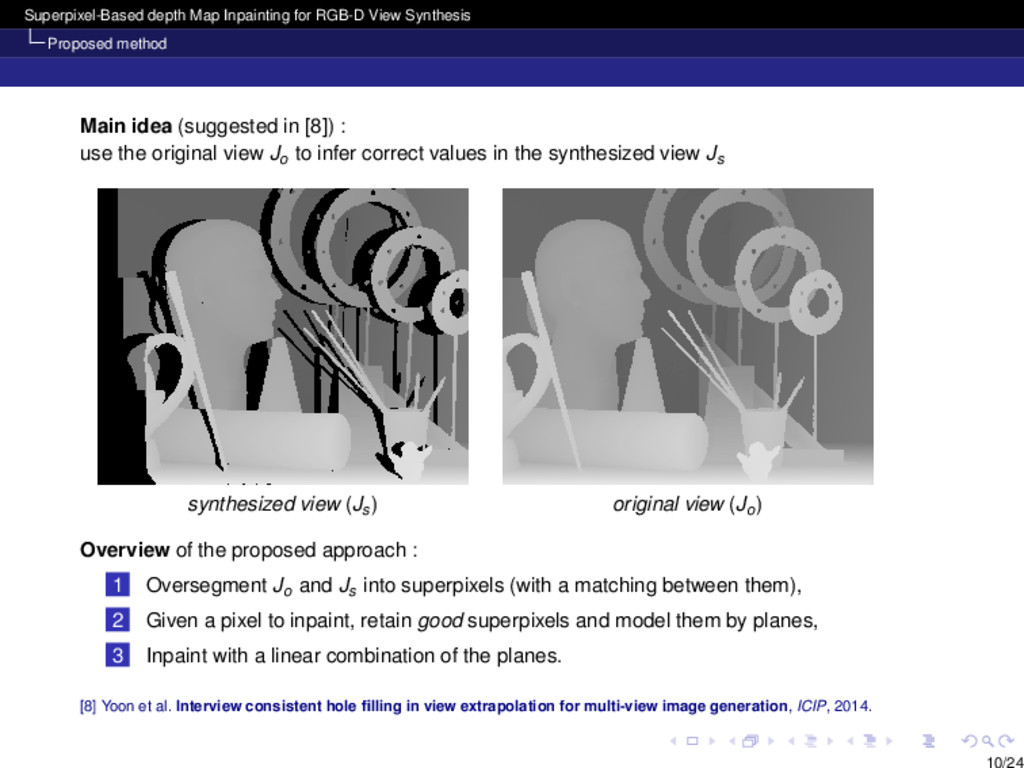
Main idea (suggested in [8]) : use the original view Jo to infer correct values in the synthesized view Js synthesized view (Js) original view (Jo) Overview of the proposed approach : 1 Oversegment Jo and Js into superpixels (with a matching between them), 2 Given a pixel to inpaint, retain good superpixels and model them by planes, 3 Inpaint with a linear combination of the planes. [8] Yoon et al. Interview consistent hole filling in view extrapolation for multi-view image generation, ICIP, 2014. 10/24
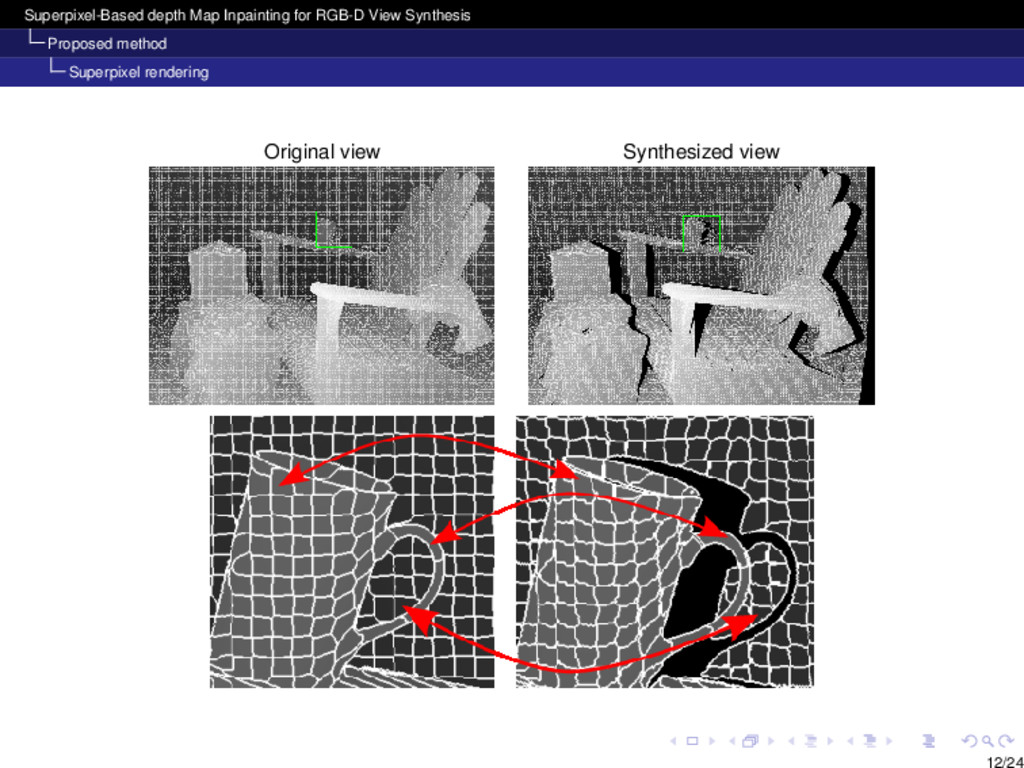
Superpixel rendering Idea : oversegment the original (Jo) and synthesized (Js) views into superpixels, s.t. there is a matching between superpixels of Jo and Js 11/24
Superpixel rendering Idea : oversegment the original (Jo) and synthesized (Js) views into superpixels, s.t. there is a matching between superpixels of Jo and Js 1 Oversegment the original view into superpixels with the Eikonal Region Growing Clustering algorithm [9], results in a dense over-segmentation of Jo that respect object boundaries. [9] Eikonal-based Region Growing for efficient Clustering, Image and Vision Computing, 2014. 11/24
Superpixel rendering Idea : oversegment the original (Jo) and synthesized (Js) views into superpixels, s.t. there is a matching between superpixels of Jo and Js 1 Oversegment the original view into superpixels with the Eikonal Region Growing Clustering algorithm [9], results in a dense over-segmentation of Jo that respect object boundaries. 2 Warp the resulting label map results in the oversegmentation of the synthesized view Js, with a matching between the superpixel labels. [9] Eikonal-based Region Growing for efficient Clustering, Image and Vision Computing, 2014. 11/24
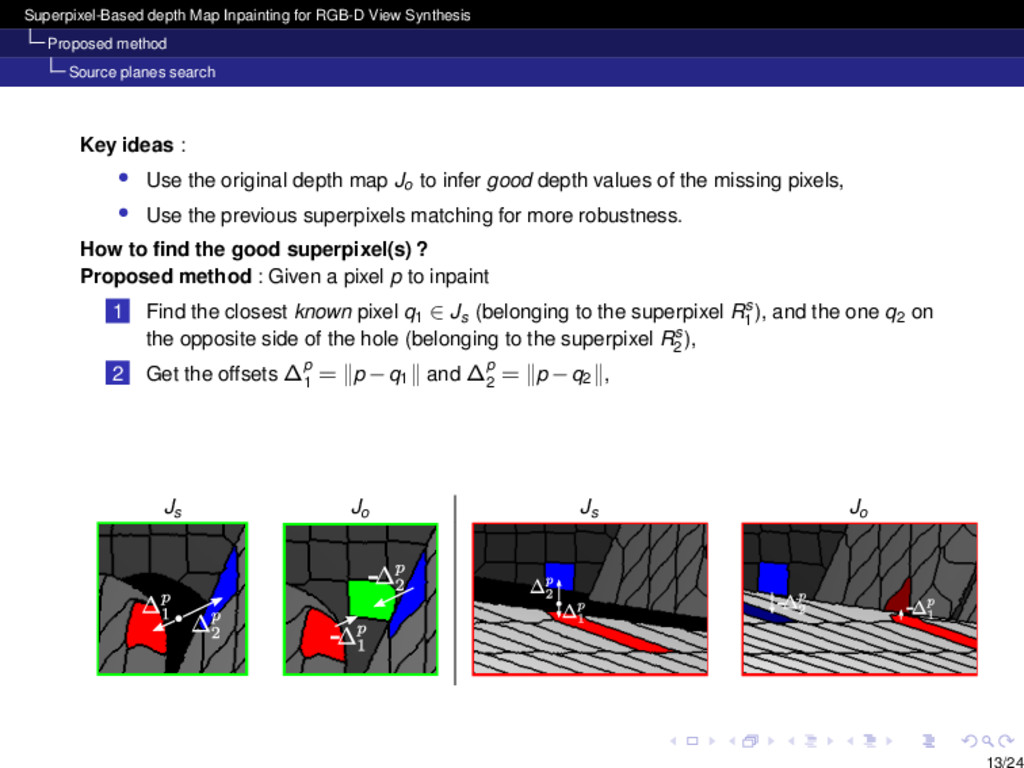
Source planes search Key ideas : • Use the original depth map Jo to infer good depth values of the missing pixels, • Use the previous superpixels matching for more robustness. 13/24
Source planes search Key ideas : • Use the original depth map Jo to infer good depth values of the missing pixels, • Use the previous superpixels matching for more robustness. How to find the good superpixel(s) ? 13/24
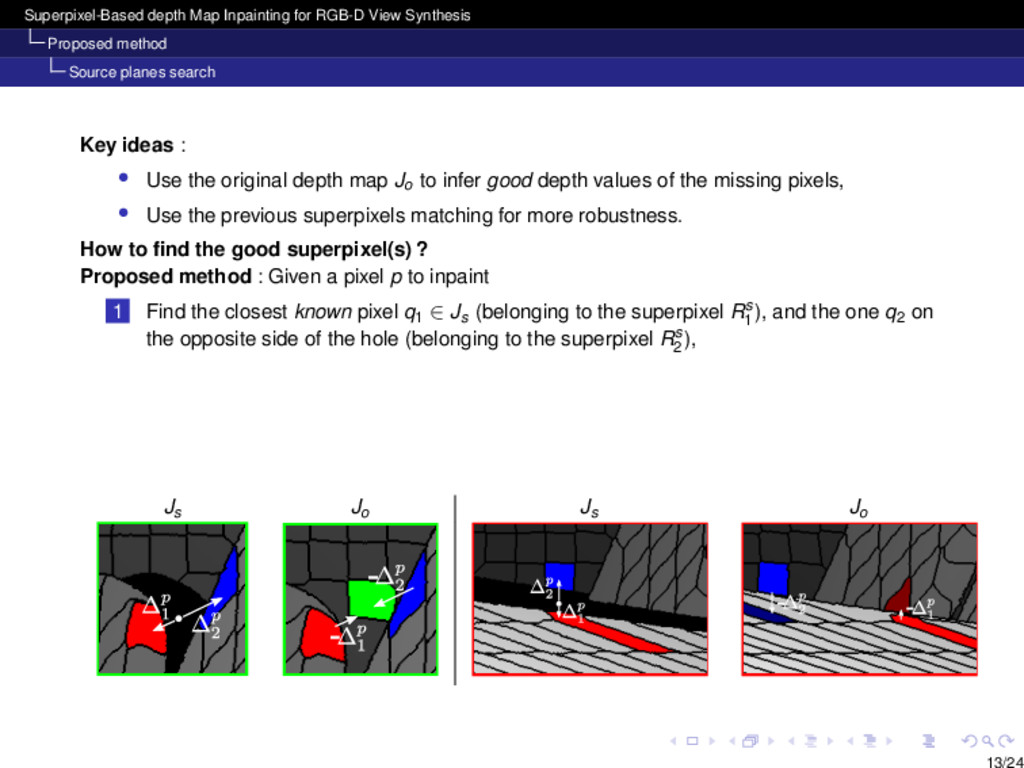
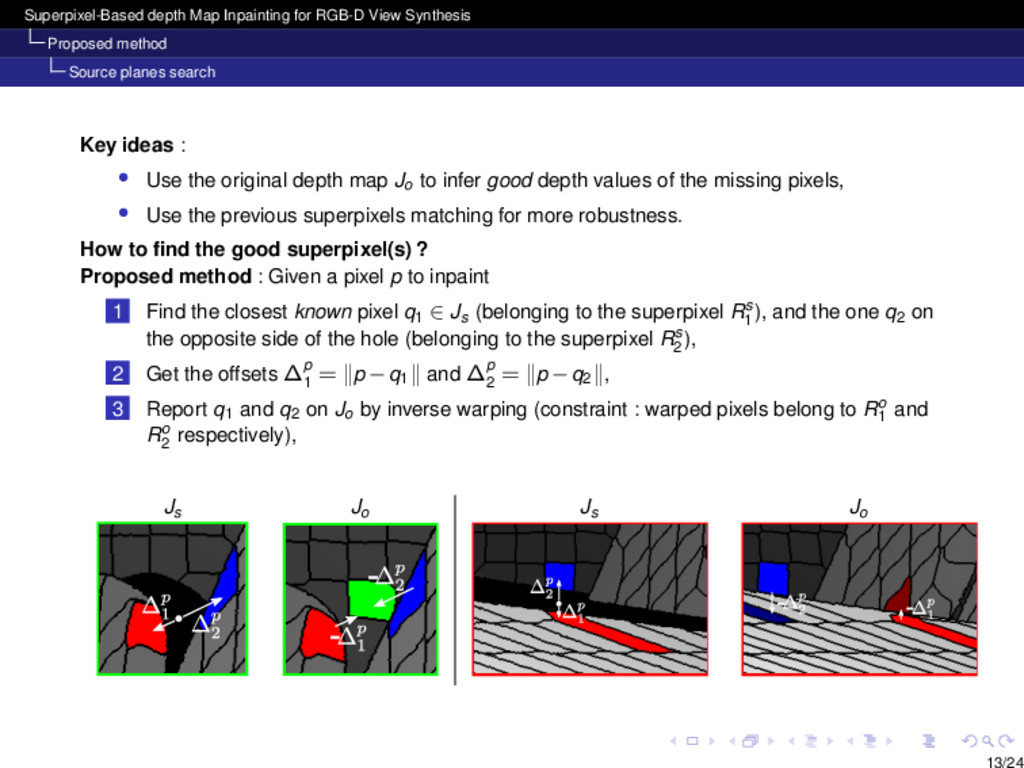
Source planes search Key ideas : • Use the original depth map Jo to infer good depth values of the missing pixels, • Use the previous superpixels matching for more robustness. How to find the good superpixel(s) ? Proposed method : Given a pixel p to inpaint 1 Find the closest known pixel q1 ∈ Js (belonging to the superpixel Rs 1 ), and the one q2 on the opposite side of the hole (belonging to the superpixel Rs 2 ), Js Jo Js Jo 13/24
Source planes search Key ideas : • Use the original depth map Jo to infer good depth values of the missing pixels, • Use the previous superpixels matching for more robustness. How to find the good superpixel(s) ? Proposed method : Given a pixel p to inpaint 1 Find the closest known pixel q1 ∈ Js (belonging to the superpixel Rs 1 ), and the one q2 on the opposite side of the hole (belonging to the superpixel Rs 2 ), 2 Get the offsets ∆p 1 = p −q1 and ∆p 2 = p −q2 , Js Jo Js Jo 13/24
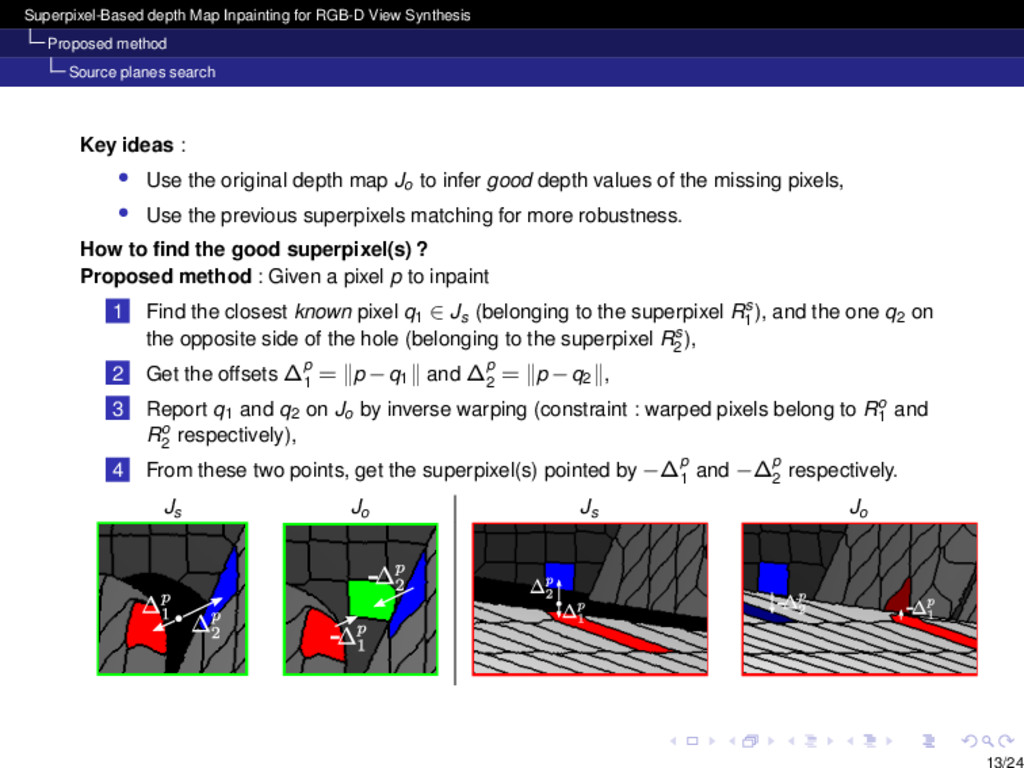
Source planes search Key ideas : • Use the original depth map Jo to infer good depth values of the missing pixels, • Use the previous superpixels matching for more robustness. How to find the good superpixel(s) ? Proposed method : Given a pixel p to inpaint 1 Find the closest known pixel q1 ∈ Js (belonging to the superpixel Rs 1 ), and the one q2 on the opposite side of the hole (belonging to the superpixel Rs 2 ), 2 Get the offsets ∆p 1 = p −q1 and ∆p 2 = p −q2 , 3 Report q1 and q2 on Jo by inverse warping (constraint : warped pixels belong to Ro 1 and Ro 2 respectively), Js Jo Js Jo 13/24
Source planes search Key ideas : • Use the original depth map Jo to infer good depth values of the missing pixels, • Use the previous superpixels matching for more robustness. How to find the good superpixel(s) ? Proposed method : Given a pixel p to inpaint 1 Find the closest known pixel q1 ∈ Js (belonging to the superpixel Rs 1 ), and the one q2 on the opposite side of the hole (belonging to the superpixel Rs 2 ), 2 Get the offsets ∆p 1 = p −q1 and ∆p 2 = p −q2 , 3 Report q1 and q2 on Jo by inverse warping (constraint : warped pixels belong to Ro 1 and Ro 2 respectively), 4 From these two points, get the superpixel(s) pointed by −∆p 1 and −∆p 2 respectively. Js Jo Js Jo 13/24
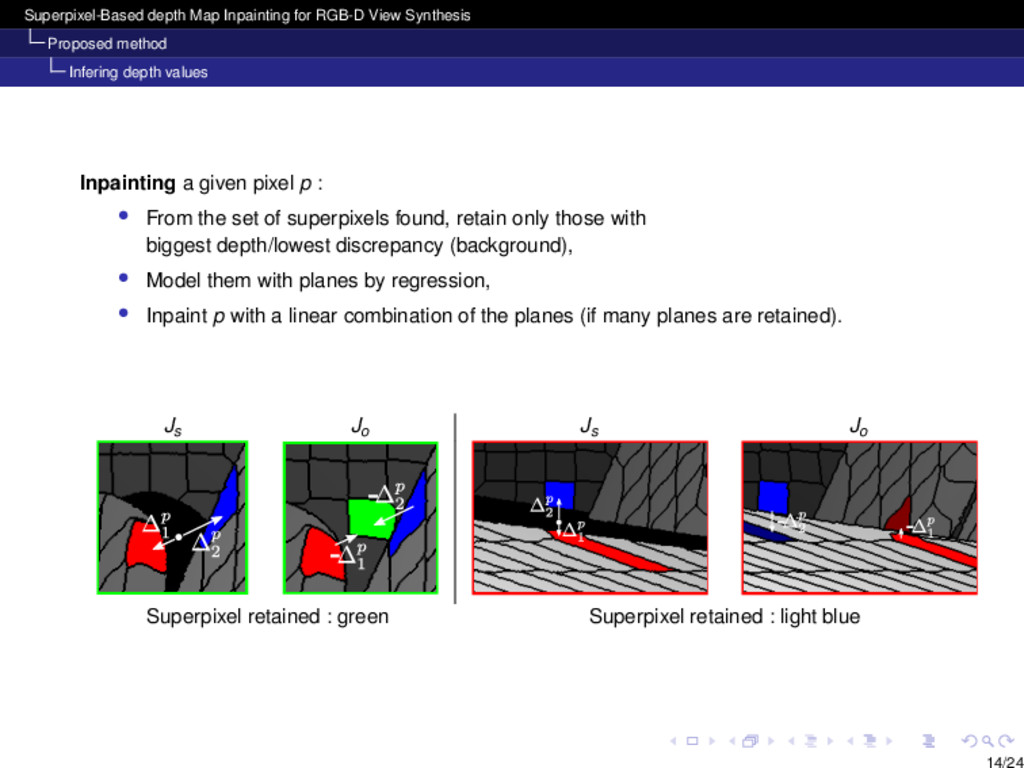
Infering depth values Inpainting a given pixel p : • From the set of superpixels found, retain only those with biggest depth/lowest discrepancy (background), • Model them with planes by regression, • Inpaint p with a linear combination of the planes (if many planes are retained). Js Jo Js Jo Superpixel retained : green Superpixel retained : light blue 14/24
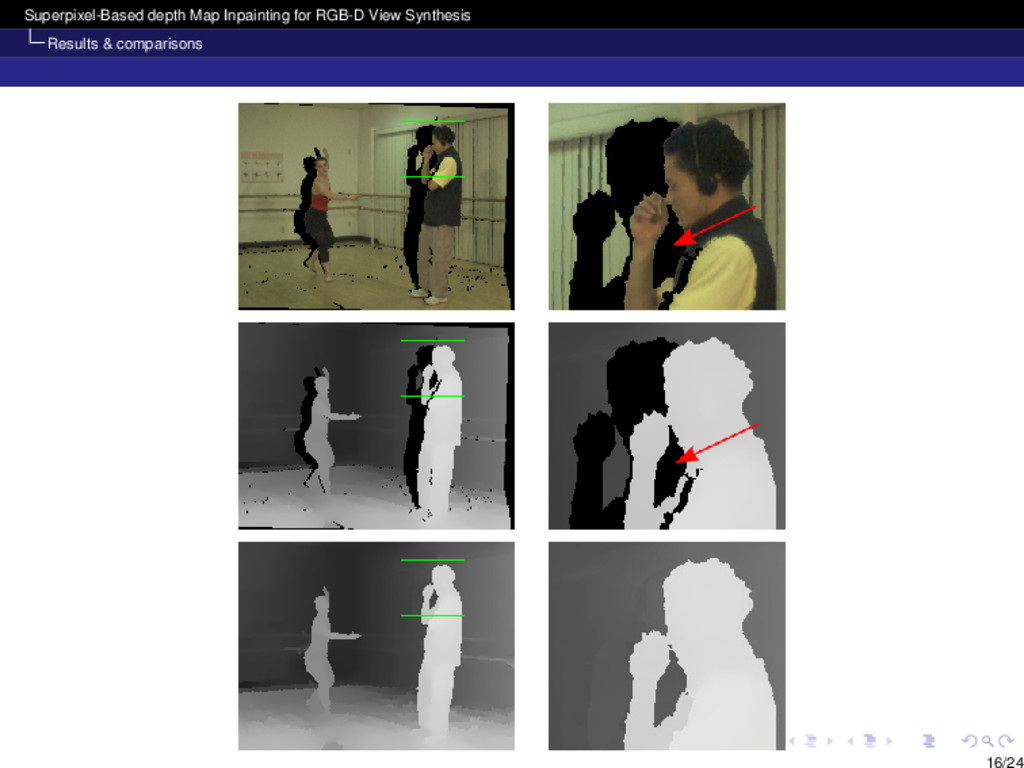
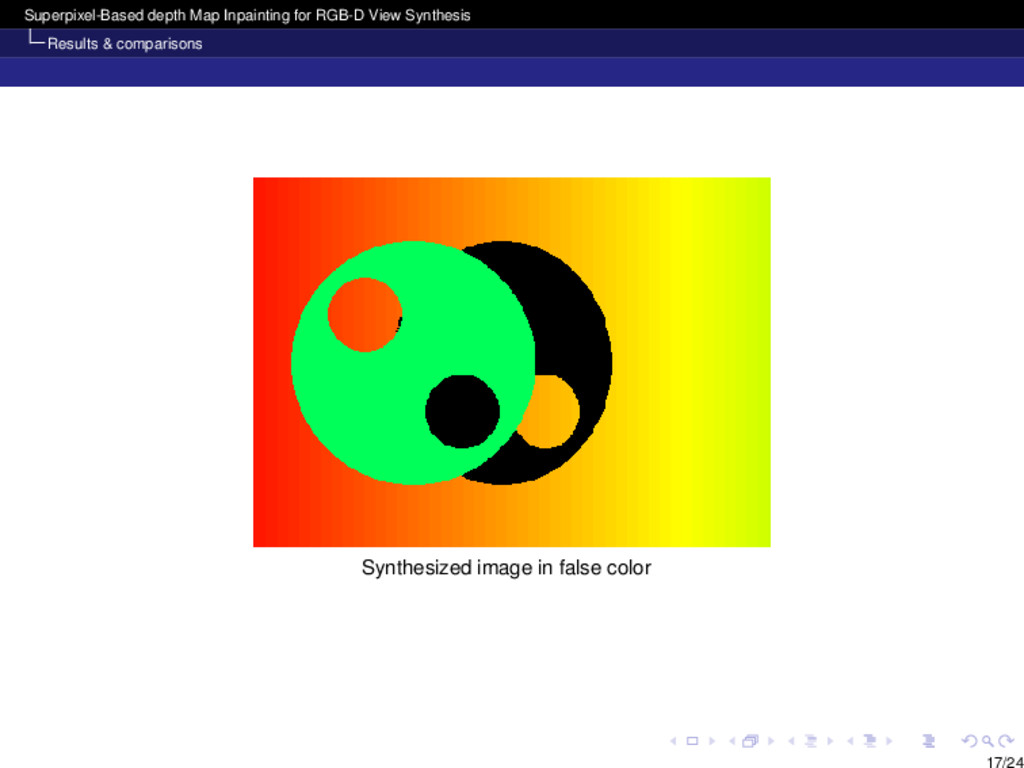
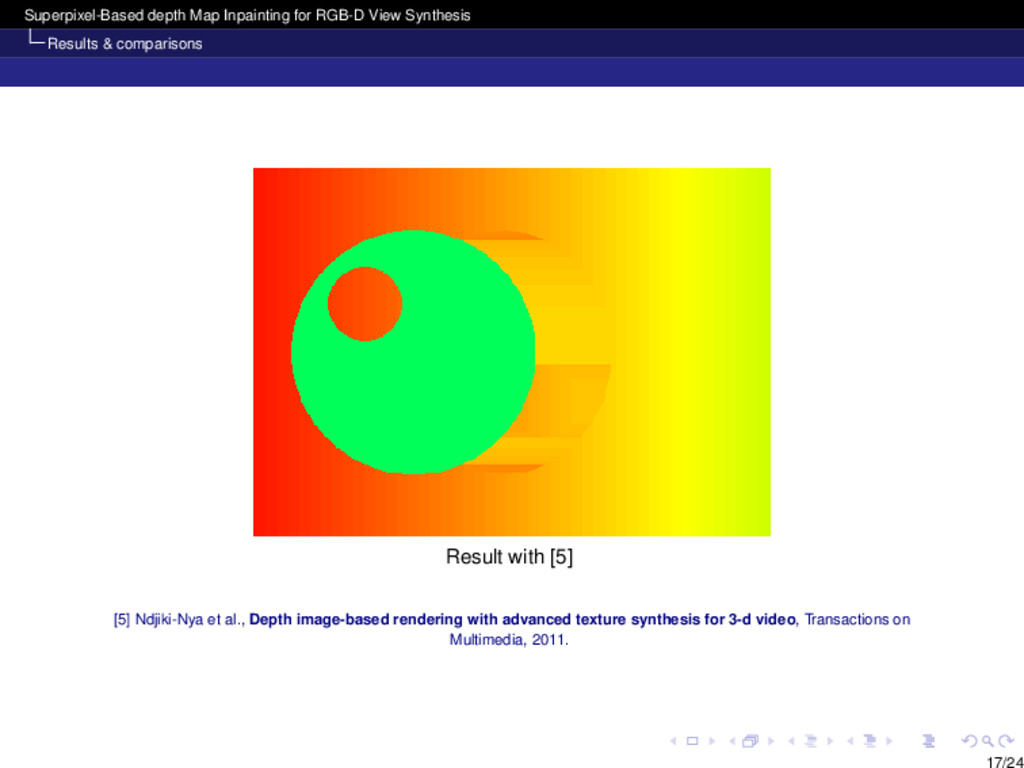
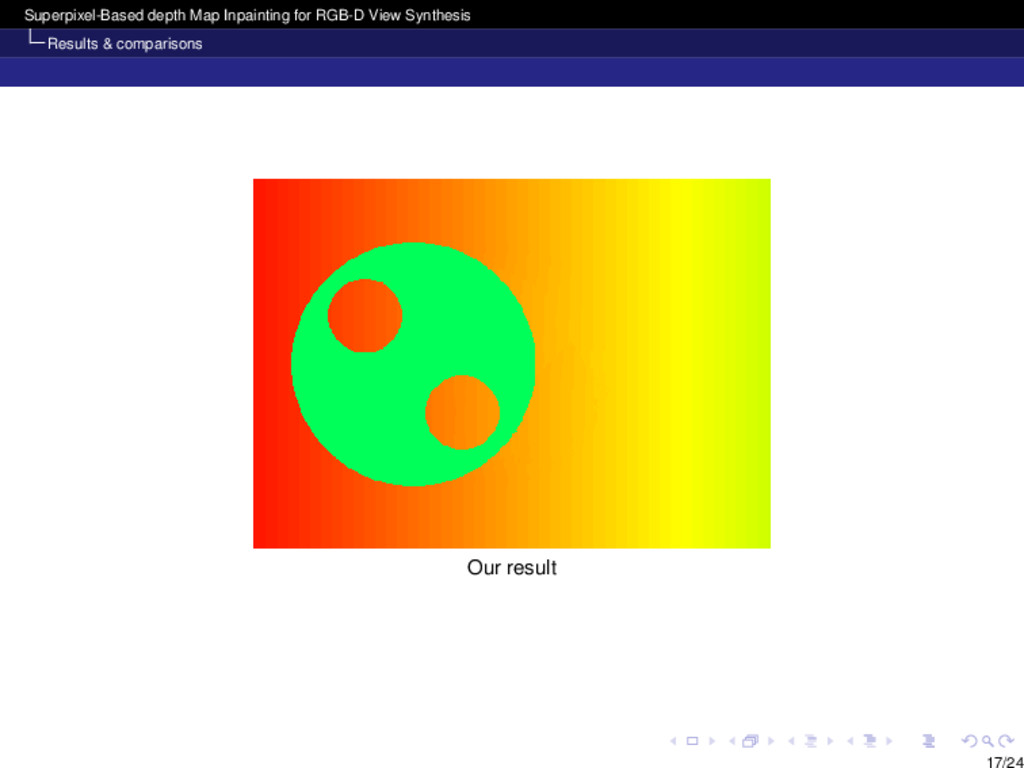
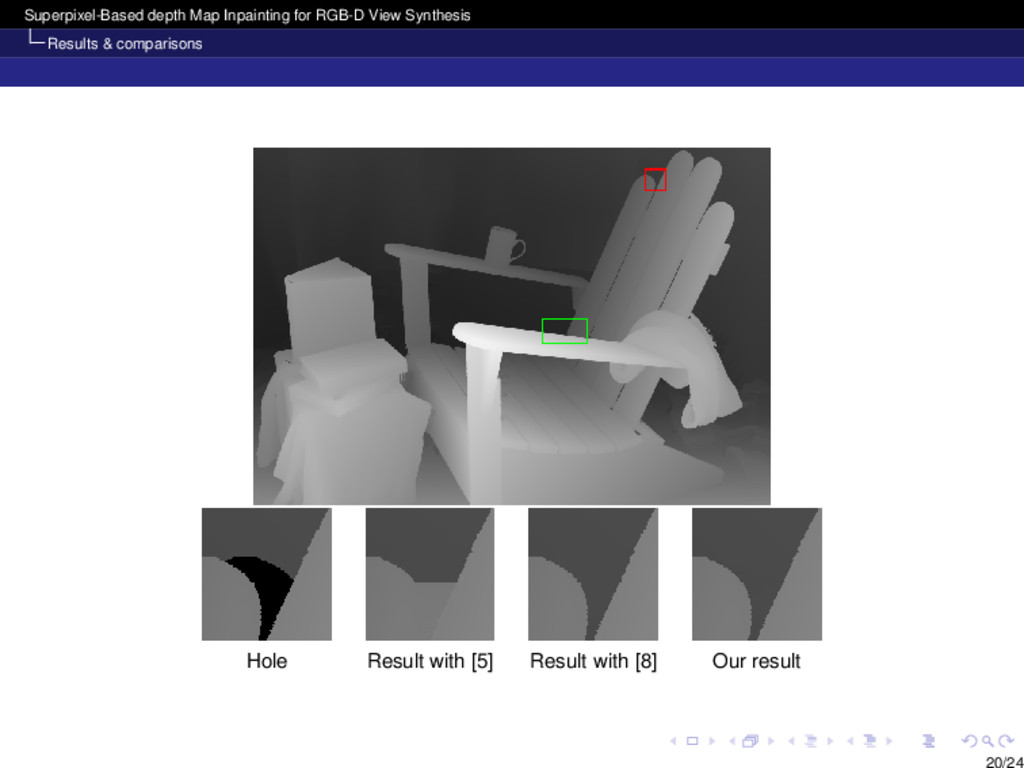
comparisons Result with [5] [5] Ndjiki-Nya et al., Depth image-based rendering with advanced texture synthesis for 3-d video, Transactions on Multimedia, 2011. 17/24
comparisons Result with with [8] [8] Yoon et al., Interview consistent hole filling in view extrapolation for multi-view image generation, ICIP, 2014. 17/24
actual work 1 Introduction & problem statement 2 Proposed method Superpixel rendering Source planes search Infering depth values 3 Results & comparisons 4 Conclusion and actual work 22/24
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}